


国外早已开展关于电力隧道巡检机器人的研究。2005年,华盛顿大学的研究团队设计了一种电缆巡检机器人。该款机器人在结构上分为2个模块,其前部作为行走机构,后部搭载传感器以采集数据[3]。但这种结构设计导致该款机器人的使用环境存在很大的局限性。加拿大的研究团队设计了一种灵活轻便且具有一定搜救能力的巡检机器人,但其不具备足够的越障能力[4]。国内针对电力隧道巡检机器人的研究起步较晚,且大多为悬挂轨道式巡检机器人。沈阳研究所最先开始展开相关研究,研制出了一种能够不间断巡检的悬挂机器人[5];朗驰欣创公司开发了一套智能巡检系统,其具备实时监控与红外热成像智能诊断功能[6];黄嘉盛等[7]设计了一种轮式巡检机器人,其能够完成信息收集工作,但越障能力不足,导致使用受到限制。
通过对电力隧道自动巡检机器人发展的综合研究,笔者设计了一款子母式自动巡检机器人,其母机采用履带式设计,具有刚度大、负荷自重比高、载荷分布均匀和运动平稳等特点;搭载的爬墙机器人子机适用于观测角度被阻碍、对工作空间要求相对较小的场景,旨在有效解决巡检机器人在复杂环境下作业的适应性问题。
1 巡检机器人整机设计
电力隧道是一种特殊的巡检环境,电力设备分布在两侧的隧道壁上,仅中间通道可供机器人巡检。传统巡检机器人受限于视野和观测角度的不足,不能充分发挥巡检功能,甚至无法及时发现设备异常。为此,设计了一款子母式自动巡检机器人,其母机不但具有较强的越障、避障能力,还具备较强的巡检功能;爬墙机器人子机搭载在巡检机器人母机上,以配合巡检机器人母机完成巡检工作。
1.1 功能与结构设计
子母式自动巡检机器人主要由行走机构、爬墙机器人子机、传感器平台、载物机构和调平机构等5个部分组成。在SolidWorks软件中建立其三维模型,各主要模块的布局如图1所示。
图1
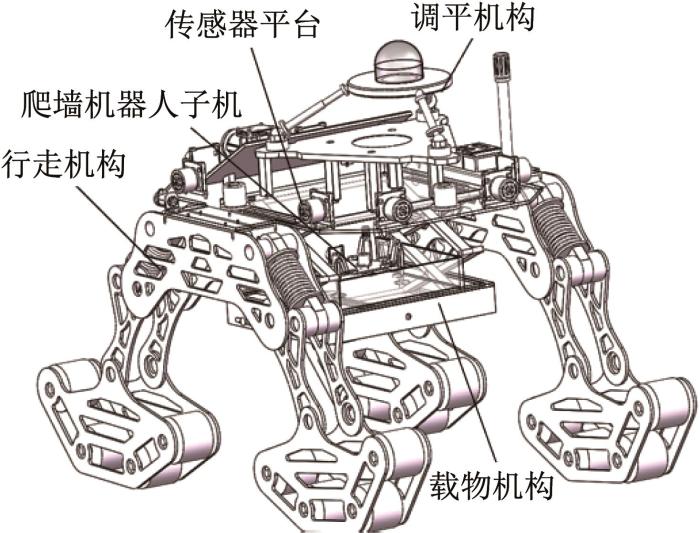
图1
子母式自动巡检机器人整机三维模型
Fig.1
Three-dimensional model of parent-child automatic inspection robot
1.1.1 行走机构
巡检机器人母机采用四履带式行走机构。四履带式行走机构兼具轮式行走机构速度快、效率高和运动噪声低以及履带式行走机构越障能力、地形适应能力强和可原地转弯等优点,其三维模型如图2所示。
图2
1.1.2 爬墙机器人子机
图3
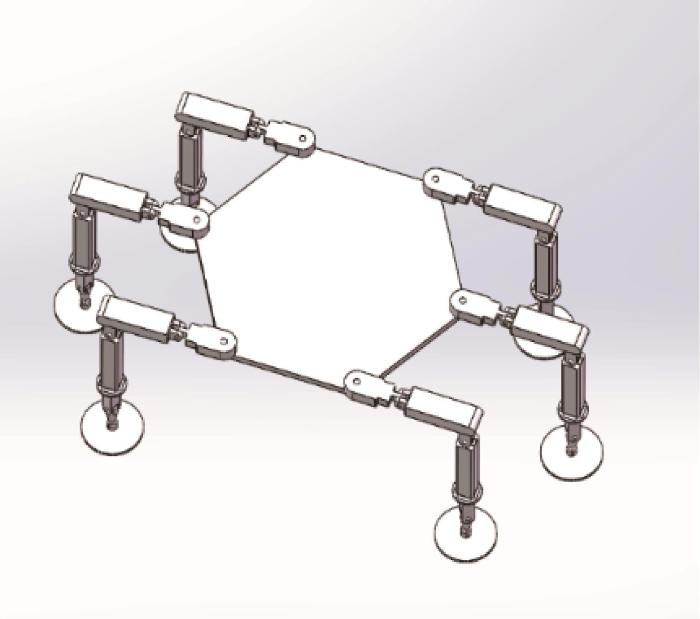
图4

为保证爬墙机器人在作业过程中的安全,对其足底吸盘进行设计。6个吸盘的尺寸相同,其直径的计算式如下:
式中:
为保证爬墙机器人的吸附能力且不至于影响其正常行走,真空度
为验证爬墙机器人在作业过程中可正常行走,对其进行受力分析(因爬墙机器人为并联机构,故仅分析其中一条腿),如图5所示。图中:F为爬墙机器人的驱动力,其可向上或向下攀爬,取竖直向上攀爬情况分析,即F的方向为竖直向上;
图5
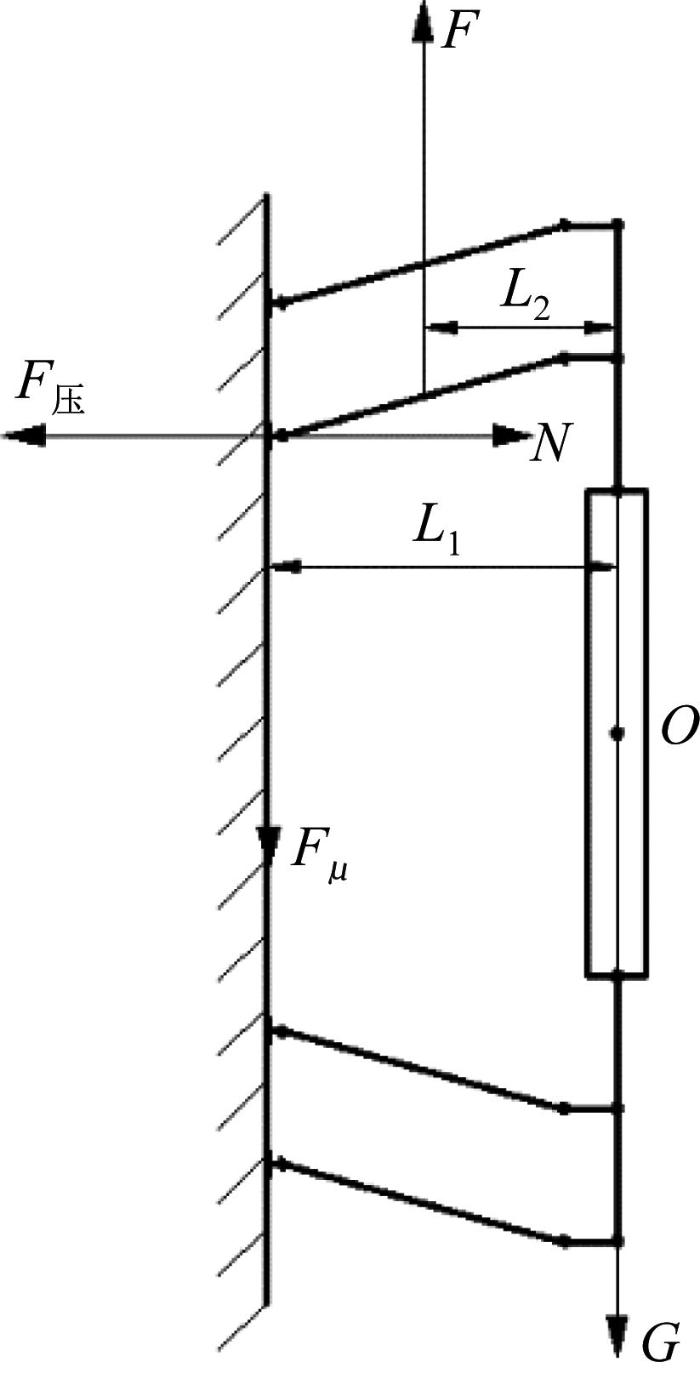
基于图5,对爬墙机器人质心O取矩,可得力平衡方程及力矩平衡方程:
将各参数的具体数值代入后计算可得,吸盘的直径大于2.8 cm时可保证爬墙机器人在作业过程中不会跌落,且不影响其步态规划。
1.1.3 传感器平台
传感器平台上载有超声波传感器、声音传感器、气体传感器、温度传感器、无线数据传输模块和自动补光相机,其结构如图6所示。在传感器平台的前、后、左、右四个方向上共设置8个超声波传感器,可有效地提高巡检机器人的避障、越障能力。同时,多种传感器协同工作,并将被测设备的声音、图像和温度等信息通过无线数据传输模块传送至数据中心。
图6

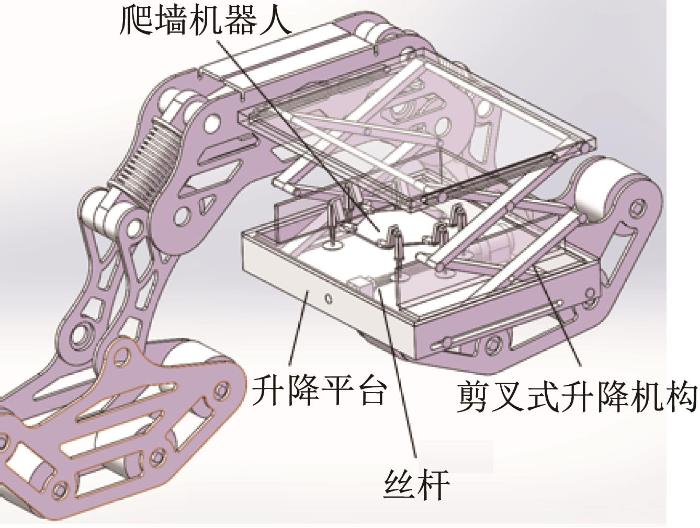
1.1.4 载物机构
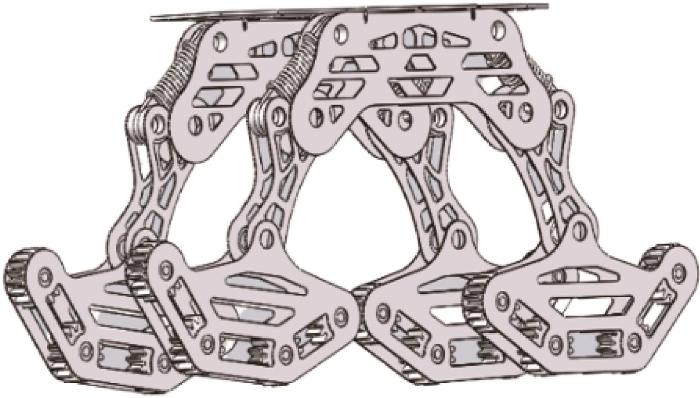
为节约空间,将具备攀爬功能的爬墙机器人子机置于可升降的载物机构内。该载物机构的升降装置采用剪叉式升降机构,其展开性能优异且运动平稳。当巡检机器人母机因视野受限而不能完成检测时,电机驱动丝杆转动,使剪叉式升降机构展开,升降平台降至地面释放子机,子机开始攀爬作业。载物机构结构设计及爬墙机器人子机如图7所示。
图7
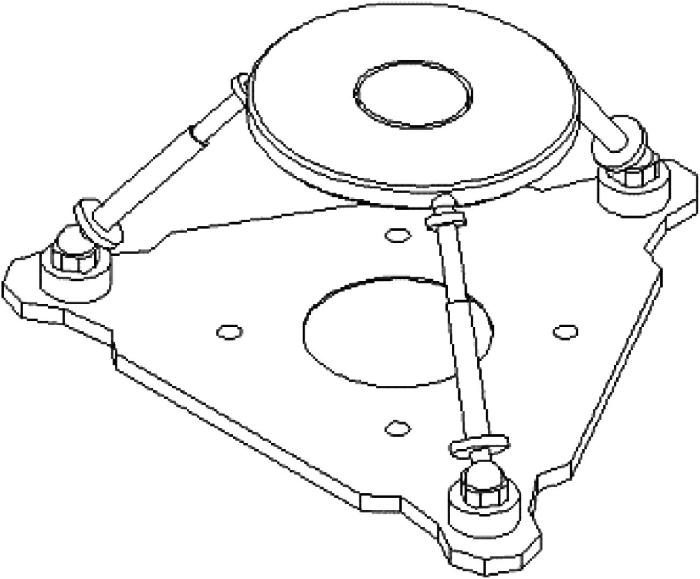
1.1.5 调平机构
在自动巡检过程中,巡检机器人会出现倾斜的情况,导致传感器平台随之倾斜。但巡检机器人需依赖传感器平台上的摄像头来观测周边环境和识别障碍物,因此需要设计一个调平机构来保证摄像头始终处于正常工作角度。所设计的调平机构由固定底座、动平台和3根伸缩杆组成,其结构如图8所示。其中:伸缩杆两端均为铰链连接,能够实现绕竖直方向的转动,同时通过电机驱动伸缩杆完成竖直方向上的移动,以保持动平台与地面平行。
图8
1.2 逻辑系统设计
巡检机器人搭载的超声波传感器能够帮助其实现避障、越障功能,其控制中心可对由无线数据传输模块传送的被测设备的声音、图像以及温度等数据进行整合分析,以判断被测设备的外观是否异常、是否存在热缺陷以及各仪表读数是否正常,从而判断是否下达相关操作命令,以完成自动化巡检。巡检机器人的逻辑系统分为4个层次:监测层、路径规划层、数据传输层和终端执行层。
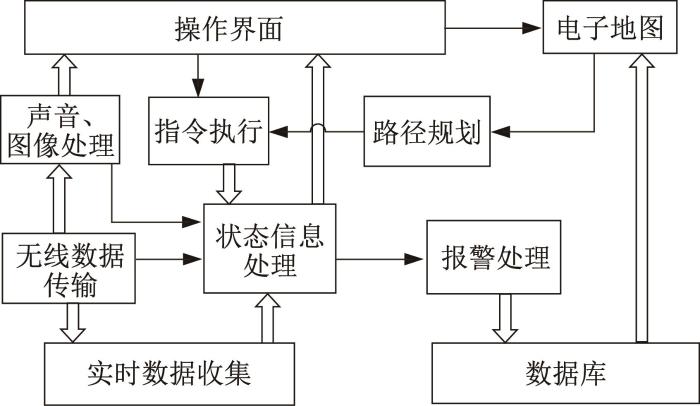
1.2.1 监测层
监测层的功能主要是完成巡检过程中的数据采集,同时供工作人员直接观测巡检状态。监测层包含数据库系统、无线数据传输模块、声音图像处理系统、路径规划系统和状态报警模块等,其逻辑结构如图9所示。
图9
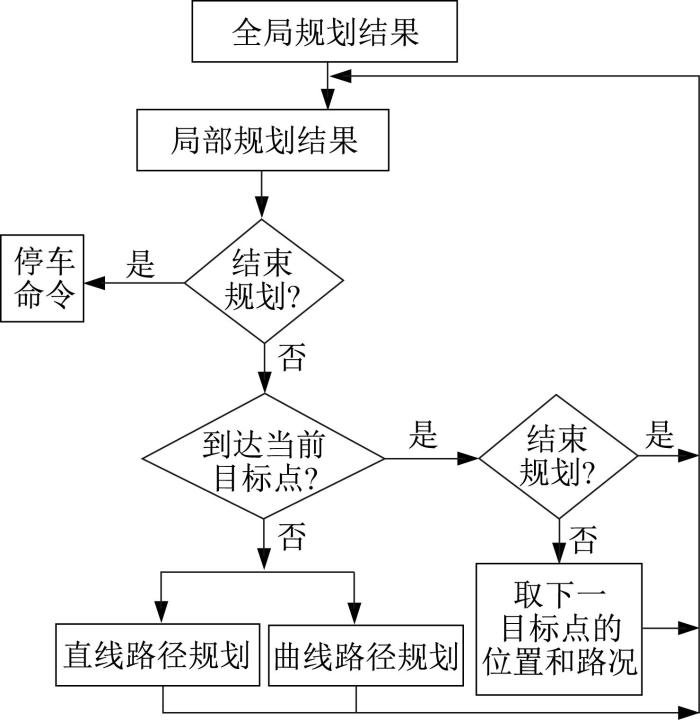
1.2.2 路径规划层
图10
1.2.3 数据传输层
数据传输层是监测层和终端执行层之间的通信连接通道。电力隧道内无线数据的传输需要克服较多困难,如隧道内部环境、噪音和电磁波动等干扰造成无线信号误码,隧道结构对无线信号的遮挡和反射降低了无线带宽的传输速度等。因此,数据传输层应选择高带宽无线传输,并以环网交换机作为无线媒介,采用QPSK(quadrature phase shift keying,四相移相键控)+ SCFDE(single carrier frequency domain equalization,单载波频域均衡)调制方式,以解决远距离多径反射和杂波问题,同时采用无中心自组织网AD-HOC的组网方式实现隧道内部网络的全覆盖[11]。
1.2.4 终端执行层
终端执行层由自动化维护模块、检测中心和监控后台组成,负责对传感器数据进行统计分析,获取各项数据的变化趋势,以实现故障分类、诊断及预测。
2 巡检机器人运动学仿真分析
受电力隧道地形环境的影响,巡检机器人在自动巡检过程中需要翻越障碍物,导致传感器平台会出现一定程度的颠簸。为验证巡检机器人结构设计的合理性,在ADAMS(automatic dynamic analysis of mechanical systems,机械系统动力学自动分析)软件中构建电力隧道运行环境,以模拟巡检机器人越障过程中传感器平台的速度和位移变化。
2.1 运动学分析
利用ADAMS软件对巡检机器人进行运动学分析时,各部件之间通过约束及运动副连接。设约束个数为n,则巡检机器人的运动学约束方程为[12]:
式中:
对巡检机器人仿真时,为使其具有确定的运动,需添加驱动约束 r :
联立
鉴于
2.2 ADAMS仿真实验
图11

图12
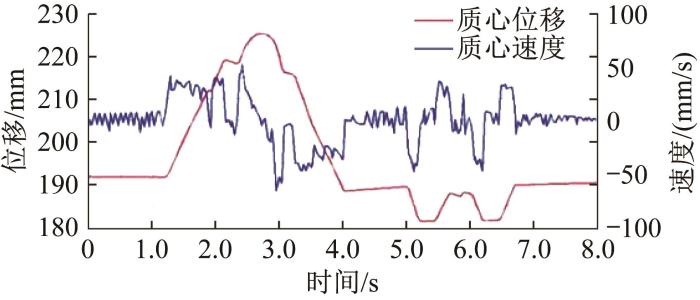
图12
巡检机器人质心的竖直位移和速度变化曲线
Fig.12
Vertical displacement and velocity curves of inspection robot centroid
图13
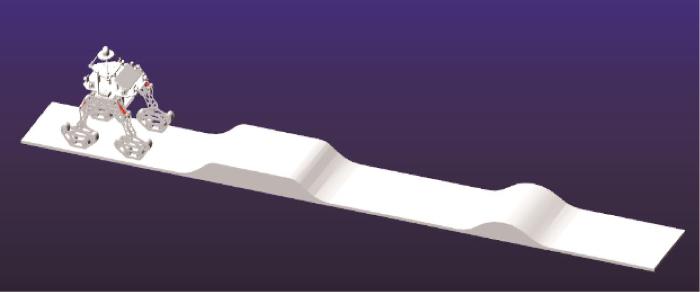
图14
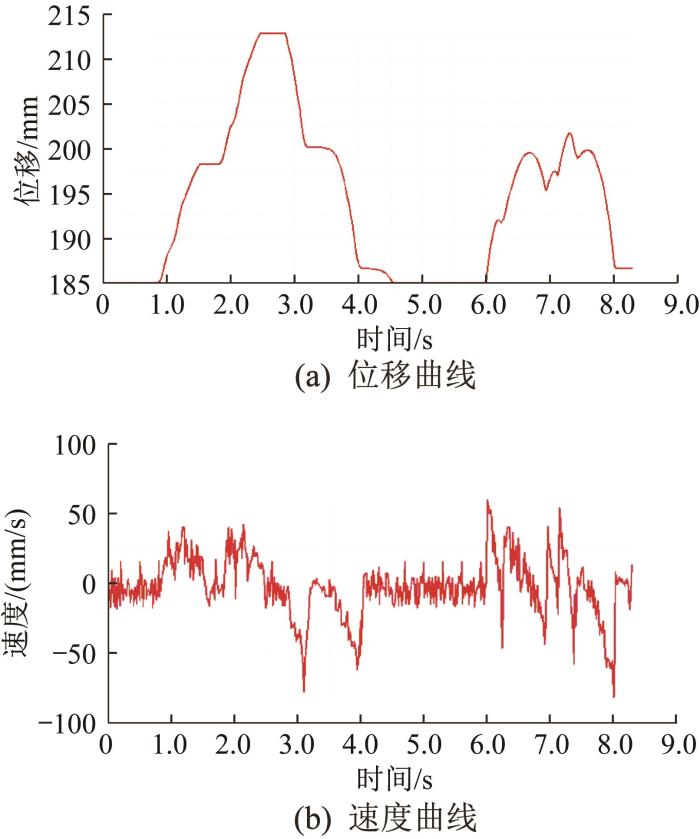
图14
传感器平台的竖直位移和速度曲线
Fig.14
Vertical displacement and velocity curves of sensor platform
图15
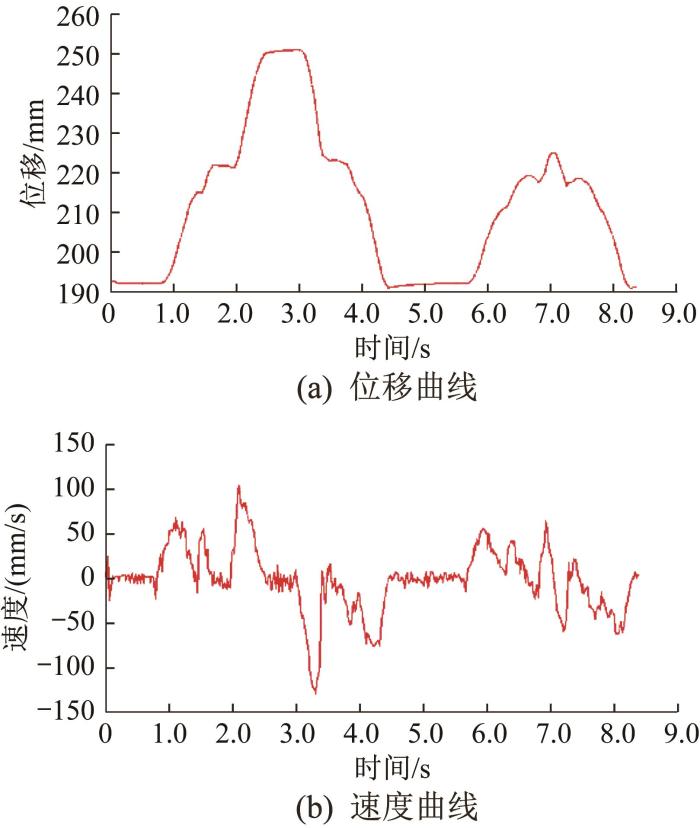
图15
添加弹簧减振器后传感器平台的竖直位移和速度曲线
Fig.15
Vertical displacement and velocity curves of sensor platform after adding spring damper
3 结束语
根据电力隧道的巡检环境,设计了一款子母式自动巡检机器人,添加的爬墙机器人子机可以解决传统巡检机器人视野和观测角度不足的问题,并设计了多层次的自动化逻辑系统。同时,利用ADAMS软件对所设计的巡检机器人进行了运动学仿真分析,并结合仿真结果对其行走机构进行了优化。仿真结果表明:添加弹簧缓振器后,在不同越障情况下,所设计的巡检机器人均能平稳运行,传感器平台的抖动频率相较于优化前降低了30%,抖动幅度在5 mm之内,传感器平台及其搭载的各种传感器均能正常工作,验证了机器人方案设计的合理性。相关理论研究结果可以为电力隧道自动巡检机器人物理样机的研制提供可靠支撑。
参考文献
某建筑机器人真空泵的选型计算
[J].
Selection and calculation of vacuum pump for construction robot
[J].
UAV/UGV协同环境下的目标识别与全局路径规划研究
[J].
Target searching and global path planning in UAV/UGV cooperative systems
[J].DOI:10.16157/j.issn.0258-7998.182261 [本文引用: 1]
基于态势评估技术的移动机器人局部路径规划
[J].
Local path planning of mobile robot based on situation assessment technolog
[J].DOI:10.11896/j.issn.1002-137X.2019.04.033 [本文引用: 1]
电力隧道在线监控与智能巡检模式建设
[J].
Construction of online monitoring and intelligent patrol inspection modes for power tunnel
[J].
电力隧道结构特点及常见病害分析
[J].
Analysis on the power tunnel structure features and its common diseases
[J].DOI:10.3969/j.issn.1006-6357.2011.02.019 [本文引用: 1]
城市电力隧道施工发展前景及工法比选
[J].
The prospects for development and construction method comparison of urban electric power tunnel construction
[J].DOI:10.3969/j.issn.1009-6825.2019.08.077 [本文引用: 1]
关于传感器在机器人中的应用分析
[J].
Application analysis of sensor in robot
[J].
工业机器人传感器技术综述
[J].
Overview of sensor technology for industrial robots
[J].DOI:10.3969/j.issn.1671-0711.2021.22.015 [本文引用: 1]
电缆隧道综合监测系统设计与实现
[D].
Design and implementation of cable tunnel integrated monitoring system
[D].
Autonomous robotic monitoring of underground cable systems
[C]//
变电站巡检机器人研究现状综述
[J].
Research status review of robots applied in substations for equipment inspection
[J].DOI:10.3969/j.issn.1007-9904.2015.01.006 [本文引用: 1]
全国首台轨道式变电站巡检机器人投入试运行
[J].
The country’s first track-type substation inspection robot was put into trial operation
[J].
朗驰欣创:打造机器人新生态
[J].
Langchi Xinchuang: create the new ecosystem of robots
[J].
轮式智能巡检机器人在电力隧道环境应用
[J].
Application of wheeld intelligent inspection robot in power tunnel environment
[J].DOI:10.3969/j.issn.1002-1388.2019.04.034 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}