电力隧道自动巡检机器人设计与运动仿真
Design and motion simulation of automatic inspection robot for power tunnel
电力隧道自动巡检机器人设计与运动仿真 |
| 徐诗洋,吴炳晖,纪冬梅,戴新宇 |
|
Design and motion simulation of automatic inspection robot for power tunnel |
| Shi-yang XU,Bing-hui WU,Dong-mei JI,Xin-yu DAI |
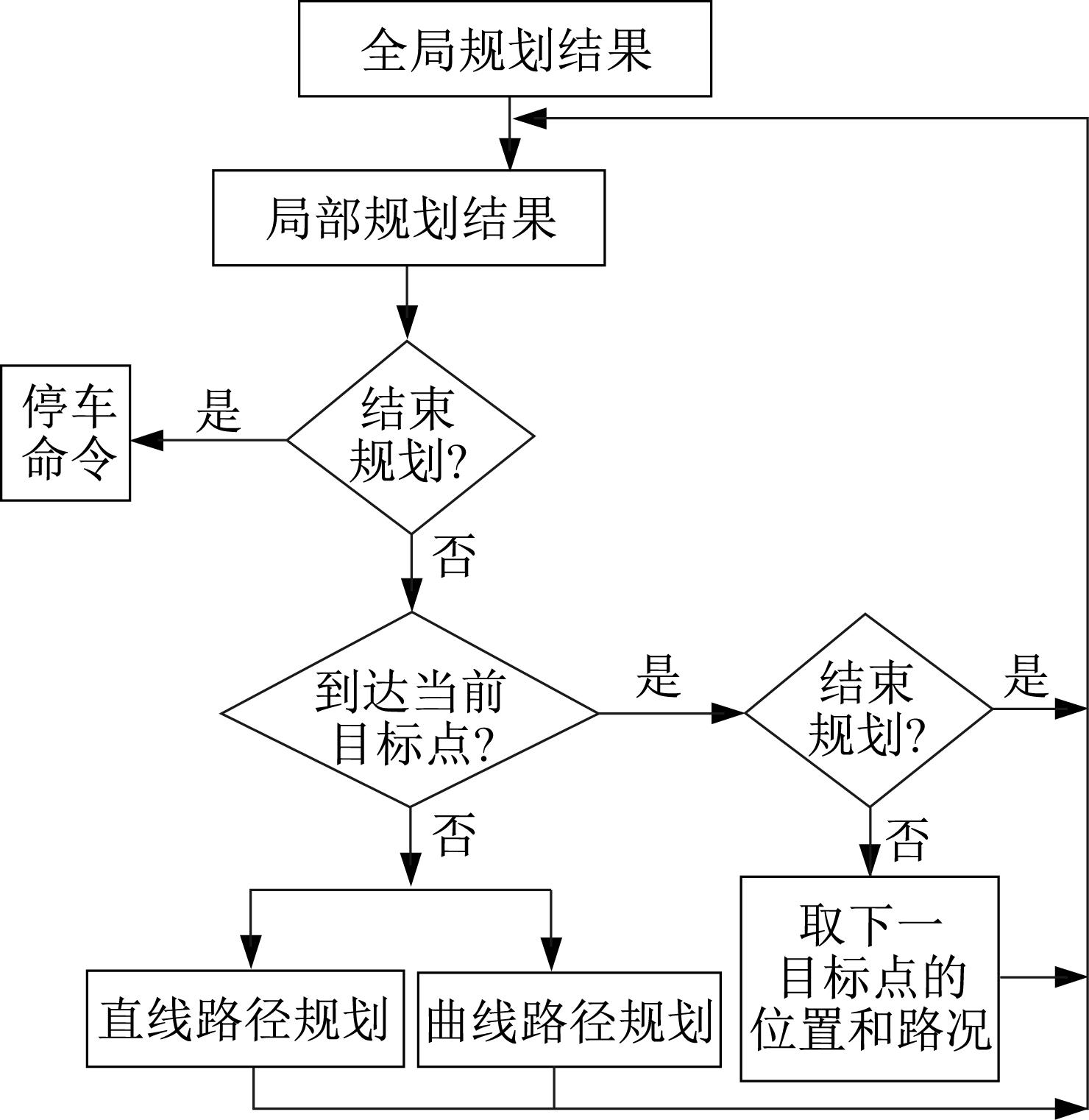
| 图10 路径规划层逻辑结构 |
| Fig.10 Logical structure of path planning layer |
|
|