


近年来,经循证医学证明镜像疗法是一种有效的临床治疗方法,可用于脑卒中后单侧忽略症患者或偏瘫患者的上肢运动功能恢复[1]。镜像疗法的原理是:利用一面镜子反射健肢动作,让患者产生患肢运动的错觉,以刺激其大脑产生运动意识,从而促使患肢运动功能重建。镜像疗法有效性的内在机制是人体大脑镜像神经元的激活,从而促进大脑神经的可塑性[2-3]。镜像疗法已被广泛应用于人体上肢康复的临床治疗。但传统的镜像治疗存在一定的局限性:第一,患肢实际上是无法移动的,仅通过运动想象来促使大脑神经元重塑;第二,镜像是通过镜子反射产生的,因镜像装置的限制,临床治疗效果的稳定性会受到影响。因此,镜像疗法的实施亟须寻求创新突破[4]。
目前,已有很多学者针对镜像疗法的有效实施提出了多种方法,可归纳为以下2类。一类是将镜像疗法与虚拟现实技术结合,使患者产生身临其境的沉浸感,增加康复治疗的趣味性。如:冈山大学的Kenji等[5]开发了一个虚拟现实镜像视觉反馈系统,其由计算机、手部动作捕捉数据手套、手臂移动跟踪定位系统、显示器和虚拟训练游戏系统组成,患者通过穿戴数据手套来控制虚拟场景中的手臂移动,利用运动想象产生患肢抓取的错觉。该系统可同时进行手腕和手指功能的康复训练。奥塔哥大学的Hoermann等[6]开发了一个用于手部运动功能康复训练的镜像系统,通过摄像头采集健康手的图像,并在液晶屏幕上显示其镜像图像,然后基于Unity3D软件设计虚拟镜像场景,以进行患肢手部的镜像康复治疗。另一类是将镜像疗法与上肢康复训练机器人结合,使用机器人进行辅助训练有利于上肢运动功能的恢复,弥补了传统镜像疗法中患肢不能动的缺陷,促进了视觉和本体感觉的整合。如:Beom等[7]设计了一个可以实时运动的穿戴式两轴机器人,用于偏瘫患者手臂的康复训练。该机器人的原理为:健肢一侧的传感器将位姿信息转换为坐标信号并传递给患肢一侧的机器人,以使患肢和健肢同步移动,通过两肢体间的空间耦合效应促进患肢运动功能的恢复(其作用机制是在镜像神经元作用下,一侧肢体倾向于采用另一侧肢体的空间特征)。在采用机器人辅助训练的镜像治疗中,机器人通过镜像对称的映射运动来带动患肢运动,形成双侧肢协同运动模式,使得未受损的大脑半球与受损的大脑半球相互作用,从而更好地诱导大脑运动皮层网络的重组,促进皮层神经的可塑性[8-10]。
综上所述,健肢运动镜像的虚拟现实呈现和机器人辅助患者双侧肢协同运动均能有效改善传统镜像疗法的不足,提高康复效率。基于此,笔者通过将镜像康复理论、虚拟现实技术和机器人技术三者有效结合,提出了一种体感交互式上肢镜像康复训练机器人系统。该系统采用可穿戴式动作捕捉设备快速获取患者健肢的位姿信息,并利用虚拟现实技术将健肢与健肢镜像运动呈现到虚拟场景中,同时使用气动机械臂牵引患肢作镜像运动,以实现体感交互式镜像康复训练。
1 上肢镜像康复训练机器人系统结构
图1
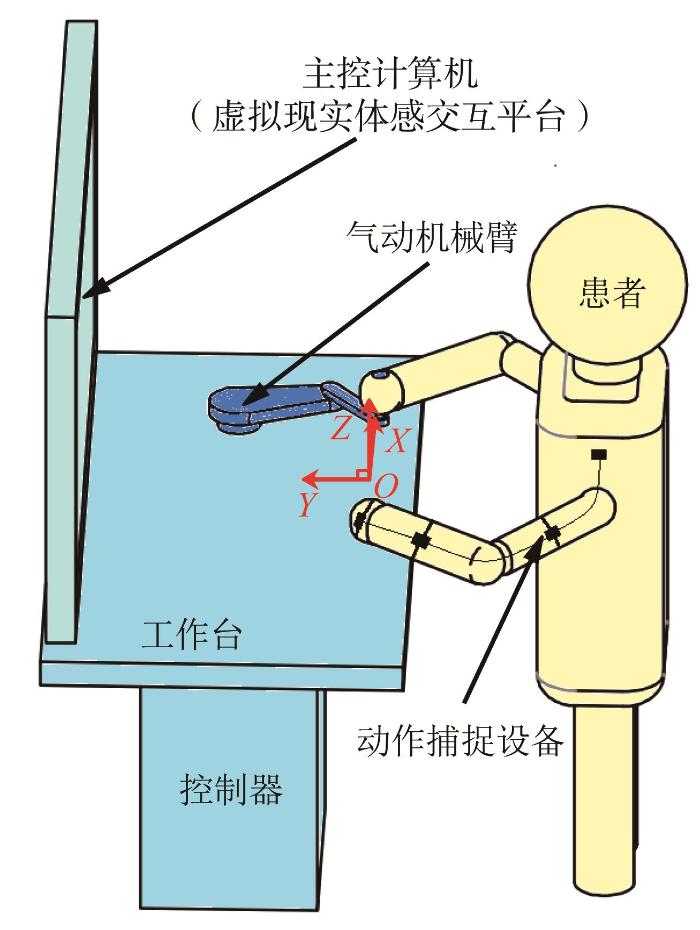
图1
体感交互式上肢镜像康复训练机器人系统的总体布局
Fig.1
Overall layout of somatosensory interactive upper-limb mirror rehabilitation training robot system
体感交互式上肢镜像康复训练机器人系统主要包括主控计算机(搭载虚拟现实体感交互平台)、控制器、可穿戴式动作捕捉设备、二自由度气动机械臂和工作台。其中,可穿戴式动作捕捉设备主要用于采集患者健肢的位姿信息;气动机械臂为平面连杆结构,其关节由摆动气缸驱动,其末端与患肢末端(手部)相连,通过末端牵引的方法进行康复训练[13]。在主控计算机端搭载的虚拟现实体感交互平台中建立实时同步的人体模型以及康复训练虚拟场景,然后基于人机镜像运动映射算法将患者健肢位姿信息换算为镜像后气动机械臂的运动轨迹,并生成相应的控制信号发送至气动机械臂的控制器,以实时控制气动机械臂带动患肢作镜像运动。
所设计的上肢镜像康复训练机器人系统适用于上肢偏瘫患者。该系统以患者健肢为主端,通过动作捕捉设备将健肢动作输入到虚拟现实体感交互平台中,健肢动作被镜像映射为患肢动作并同步到虚拟场景中,虚拟场景中的健肢镜像动作通过视觉反馈给患者,以刺激患者大脑中控制患肢运动的神经元,从而实现数字化镜像治疗。同时,健肢动作的镜像映射轨迹作为康复训练机器人的期望轨迹,由机器人带动患肢作镜像运动,促进患肢运动功能恢复。相对于传统的镜像治疗和机器人辅助训练,所设计的系统采用人体大脑和肢体双闭环的康复思想,在实现视觉反馈的镜像治疗的同时促使双侧肢协同运动,有利于患者大脑皮层神经元重塑和患肢运动功能恢复。此外,由于健肢运动更符合患肢自身的用手习惯,使用健肢运动映射控制康复训练机器人的运动更具有个性化特征[14]。
2 上肢镜像康复训练机器人的控制系统
2.1 控制系统组成
体感交互式上肢镜像康复训练机器人控制系统的硬件主要包括主控计算机、LinksRT半实物仿真机、比例压力阀、旋转编码器、摆动气缸和VD_Suit动作捕捉设备,如图2所示。
图2
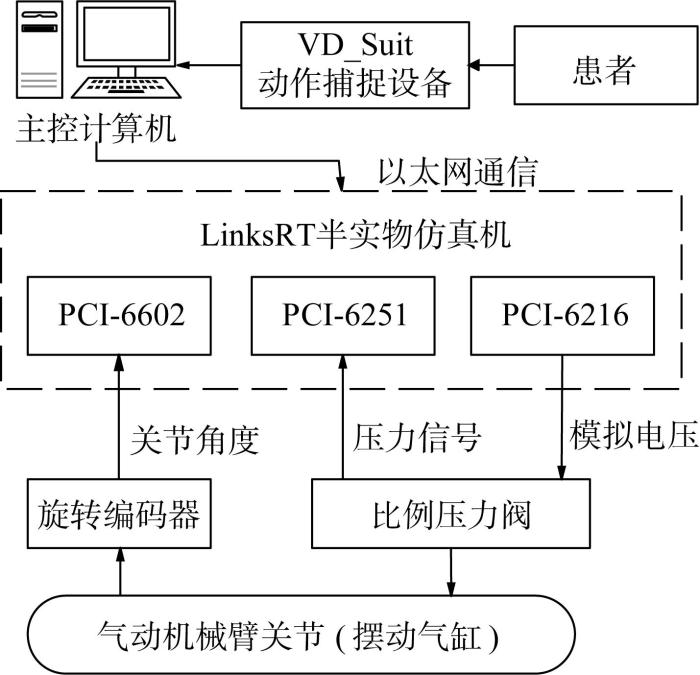
图2
体感交互式上肢镜像康复训练机器人控制系统框图
Fig.2
Control system block diagram of somatosensory interactive upper-limb mirror rehabilitation training robot
体感交互式上肢镜像康复训练机器人的控制系统基于VD_Suit动作捕捉设备采集的患者健肢的位姿信息,实现健肢与气动机械臂的运动映射;以LinksRT半实物仿真机作为控制器,其中,PCI-6602计数器板用于采集旋转编码器信号以获取气动机械臂的关节角度,PCI-6251多功能采集板卡用于采集摆动气缸的压力信号,PCI-6216模拟量输出卡用于控制比例压力阀的出口压力,从而控制气动机械臂运动。基于MATLAB/Simulink软件建立气动机械臂的控制模型,并在实际搭建的物理样机上完成半实物仿真,可以方便地调试控制算法,从而快速地验证其有效性。
2.2 控制策略设计
气动系统最大的优点是柔顺性好,其被广泛应用于各类柔性场合。气动系统能够在完成作业任务的同时保证使用者的安全和对环境的友好性。但是,由于气体的可压缩性大,使得气动系统在控制稳定性方面较电机驱动系统差。另外,气动系统的低阻尼比特性使其伺服控制的响应不够稳定。当气缸低速工作时,因受摩擦力矩的强非线性和低阻尼特性的影响,气缸在响应过程中出现“爬行”现象。因此,设计合适的控制策略来改善气动系统的伺服控制响应特性尤为重要。根据气动系统的特性,本文气动机械臂采用PD(proportional differential,比例微分)+速度前馈补偿的控制策略,如图3所示。其中,PD控制能够增大系统阻尼,提高稳定性;速度前馈补偿可有效消除系统的迟滞,从而满足康复轨迹跟踪的控制需求。
图3
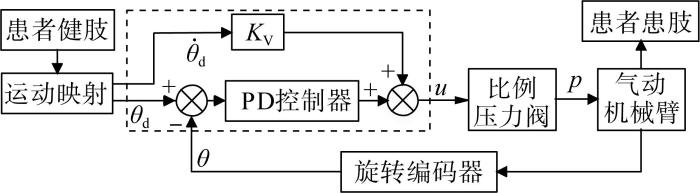
图3
气动机械臂的PD+速度前馈补偿控制策略框图
Fig.3
Block diagram of PD + speed feedforward compensation control strategy of pneumatic manipulator
基于图3,PD+速度前馈补偿控制策略可表示为:
式中:
3 人机镜像运动映射算法
体感交互式上肢镜像康复机器人实现镜像控制的关键是获取稳定的患者健肢位姿信息,并通过运动映射算法将其转换为气动机械臂的期望轨迹。本文通过VD_Suit动作捕捉设备来采集患者健肢的位姿信息[15],将其映射为气动机械臂末端的位置并规划气动机械臂各关节的转动角度,实现体感交互控制。
运动映射的目的是让气动机械臂牵引患者患肢按健肢的镜像运动进行康复训练[16]。目前,常用的运动映射方法主要包括末端映射、关节映射和关键点映射。对于主端和从端结构不一致(异构)的遥操作系统,无法在关节空间中建立二者的映射关系。在所设计的上肢镜像康复训练机器人系统中,气动机械臂与患者健肢为异构映射,且采用末端牵引的方式带动患肢,故本文选择末端映射的方法。该方法的优点是映射算法简单,且不需要考虑主、从端的结构和角度关系。在笛卡尔坐标系中,建立患者健肢末端位置与气动机械臂末端位置的映射关系,即将健肢末端的工作空间与气动机械臂末端的工作空间进行配准,从而实现健肢末端位姿与气动机械臂末端位姿的对应[17]。一般情况下,运动映射需要分别建立主、从端的运动学方程和工作空间,通过设计人机镜像运动映射算法来将健肢末端位置转换成气动机械臂末端的目标位置,随后通过求解运动学逆解来规划其关节转动角度,以实现主从跟随运动。在本文的上肢镜像康复训练机器人系统中,动作捕捉设备将采集到的患者健肢的位姿信息直接传输至虚拟场景中的人体模型,而后Unity3D软件(搭载非常强大的物理和动画引擎)直接提取健肢末端的位姿信息,无须进行复杂的运动学建模。综上,提出一种基于工作空间的人机镜像运动映射算法,如图4所示。其中:
图4
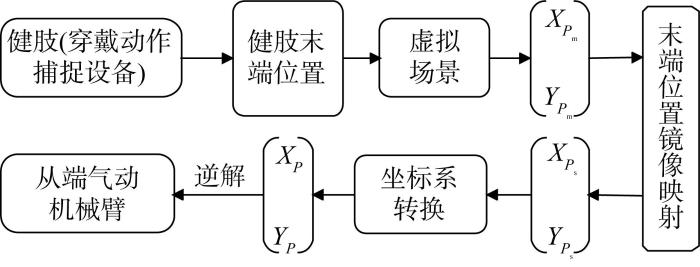
图4
基于工作空间的人机镜像运动映射算法
Fig.4
Human-machine mirror motion mapping algorithm based on workspace
主、从端工作空间的匹配是实现异构遥操作系统有效控制的基础[18-19]。在本文的上肢镜像康复训练机器人系统中,主端健肢穿戴的动作捕捉设备的工作空间为三维空间,可采集360°全方位的位姿信息,而从端气动机械臂末端只能作平面移动且可达范围有限,因此须对通过动作捕捉设备获取的健肢末端工作空间进行限定[20]:忽略垂直于工作台的Z向位移,将健肢末端的工作空间限定在与气动机械臂末端工作空间对应的一定范围的平面内,仅将健肢末端在该平面内的位移视为有效信号。对气动机械臂末端的工作空间进行分析,并建立其运动学模型。二自由度气动机械臂的结构及各坐标系之间的关系如图5所示。其中:XOY为世界坐标系,X1O1Y1为以气动机械臂大臂关节为原点构建的基坐标系,X2O2Y2为以气动机械臂小臂关节为原点构建的坐标系。
图5
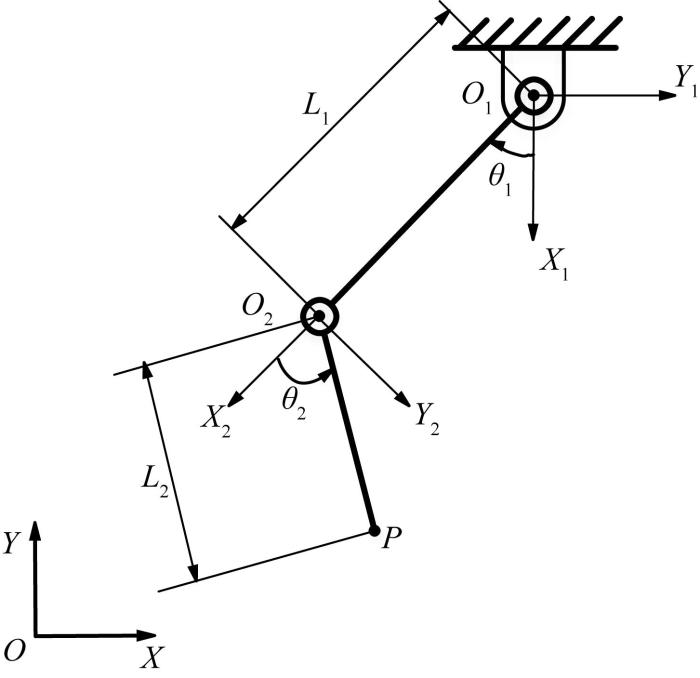
图5
二自由度气动机械臂结构简图及坐标系构建
Fig.5
Structure diagram of two-degree-of-freedom pneumatic manipulator and coordinate system construction
利用几何法建立二自由度气动机械臂末端的正运动学方程,可表示为:
式中:θ1、θ2分别为气动机械臂大、小臂关节的转动角度,以逆时针方向为正向;L1、L2分别为气动机械臂大、小臂的长度。
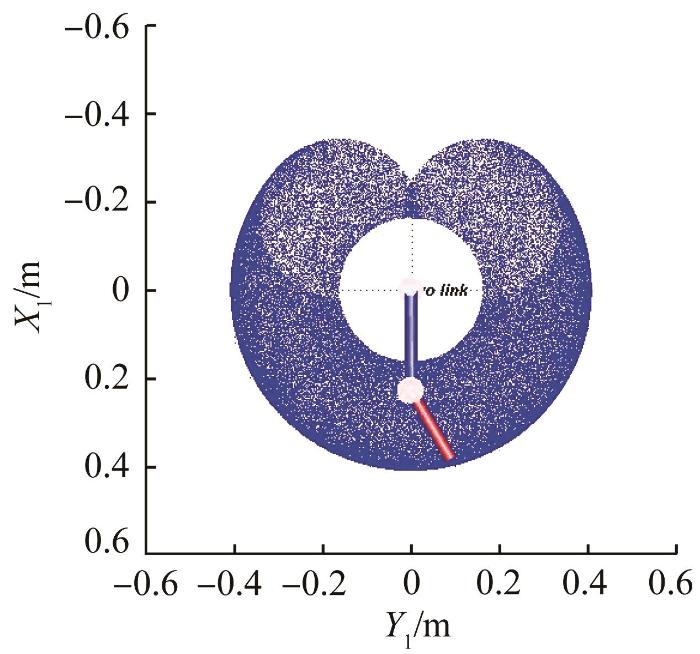
根据二自由度气动机械臂末端的正运动学方程,得到其末端的工作空间,如图6所示。
图6
对于基于工作空间的人机镜像运动映射算法,需要将人体健肢末端的位置映射到牵引患肢的气动机械臂末端的工作空间中,建立健肢末端与气动机械臂末端工作空间的镜像映射关系,如图7所示。图中:XmOmYm为健肢工作坐标系,XsOsYs为患肢工作坐标系,其坐标轴方向相同。
图7
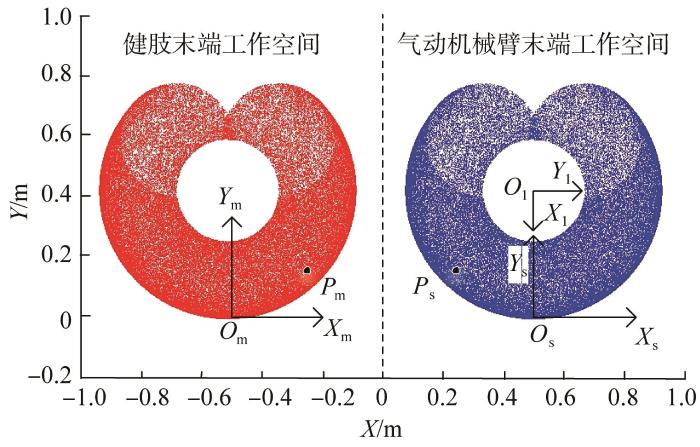
图7
健肢末端与气动机械臂末端工作空间的镜像映射关系
Fig.7
Mirror mapping relationship of workspace between healthy limb end and pneumatic manipulator end
基于工作空间的人机镜像运动映射算法采用点到点的方式控制气动机械臂运动。基于上述定义的坐标系,得到健肢工作坐标系与患肢工作坐标系的镜像变换矩阵sTm:
式中:KX 、KY 为X、Y向上的比例映射系数。
由于本文上肢镜像康复训练机器人系统的运动映射为镜像映射,且健肢、患肢工作坐标系的方向都一致,取KX = -1, KY =1,则可得健肢、患肢末端位置的映射关系为:
式中: Pm为健肢末端在健肢工作坐标系中的位置矢量; Ps为患肢末端在患肢工作坐标系中的位置矢量。
当气动机械臂工作时,其末端与患肢末端相连。为了求解气动机械臂末端在基坐标系X1O1Y1中的位置,需对患肢末端位置矢量进行坐标转换,转换过程如下:
式中:
设患肢工作坐标系XsOsYs相对于气动机械臂基坐标系X1O1Y1的旋转角为φ,则旋转矩阵可表示为:
通过求气动机械臂末端的运动学逆解可得到其关节的转动角度。利用几何法求得气动机械臂的逆运动学方程,根据其工作情况,取θ2
4 试验验证
4.1 样机试验平台搭建
为了测试体感交互式上肢镜像康复训练机器人系统的性能,搭建了如图8所示的样机试验平台,其由主控计算机、LinksRT仿真机(内置控制器及扩展板卡)、二自由度气动机械臂和VD_Suit动作捕捉设备组成。该上肢镜像康复训练机器人系统设有被动康复训练和主动康复训练两种模式。其中:对于被动康复训练模式,气动机械臂末端的轨迹完全按照动作捕捉设备采集的患者健肢末端位置信息(或理疗师的康复训练动作轨迹)映射得到;对于主动康复训练模式,患者患肢具有一定的运动功能,患者可主动跟随健肢运动过程,自适应调节气动机械臂控制的阻抗系数,提高患肢在康复过程中的参与度。由于轨迹控制是机器人康复训练的基础,首先通过单关节轨迹跟踪试验来分析上肢镜像康复训练机器人系统的运动跟踪特性,然后通过复合运动轨迹规划试验对其多关节协调控制进行验证,最后通过镜像康复训练试验对所设计的人机镜像运动映射算法和控制策略的有效性进行验证。
图8
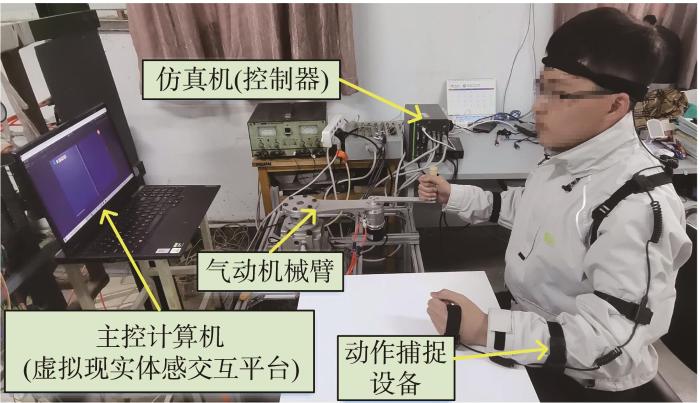
图8
体感交互式上肢镜像康复训练机器人系统样机试验平台
Fig.8
Somatosensory interactive upper limb mirror rehabilitation training robot system prototype test platform
4.2 单关节轨迹跟踪试验
表1 气动机械臂的PD+速度前馈补偿控制参数
Table 1
| 关节 | KP | KD | KV |
|---|---|---|---|
| 大臂关节 | 0.24 | 0.022 | 0.012 |
| 小臂关节 | 0.40 | 0.014 | 0.030 |
图9
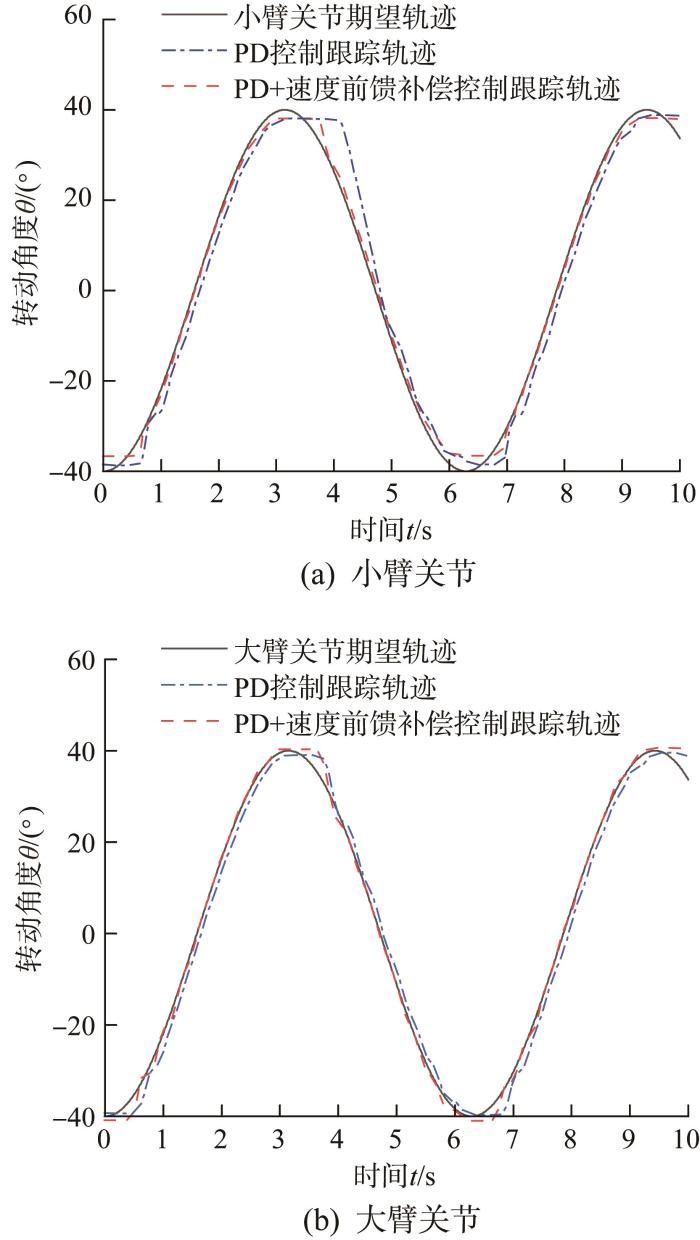
通过对比基于PD控制和PD+速度前馈补偿控制的气动机械臂单关节轨迹跟踪曲线,可以看出采用PD+速度前馈补偿控制后气动机械臂的迟滞得到了明显优化;拐点处关节的转动角度存在误差是因为当关节进行屈/伸转换时,摆动气缸需要换向,此时比例压力阀两端的压差变化较大,且在换向过程中存在的摩擦及冲击等不确定性因素,导致气动机械臂关节的轨迹跟踪存在误差。采用PD+速度前馈补偿控制时,气动机械臂大、小臂关节轨迹跟踪的平均误差分别为0.8°和1.5°,轨迹跟踪的均方根误差分别为0.8°和1.0°。由此可以看出,基于比例压力控制的气动机械臂的运动跟踪特性符合康复训练的要求。
4.3 复合运动轨迹规划试验
在上肢镜像康复训练机器人的安全工作空间内,以康复训练时常用的平面画圆动作为例规划训练轨迹,轨迹圆心在气动机械臂基坐标系X1O1Y1中的坐标为(308.15, 0)m、轨迹半径100 mm。该圆形轨迹的函数表达式为:
图10
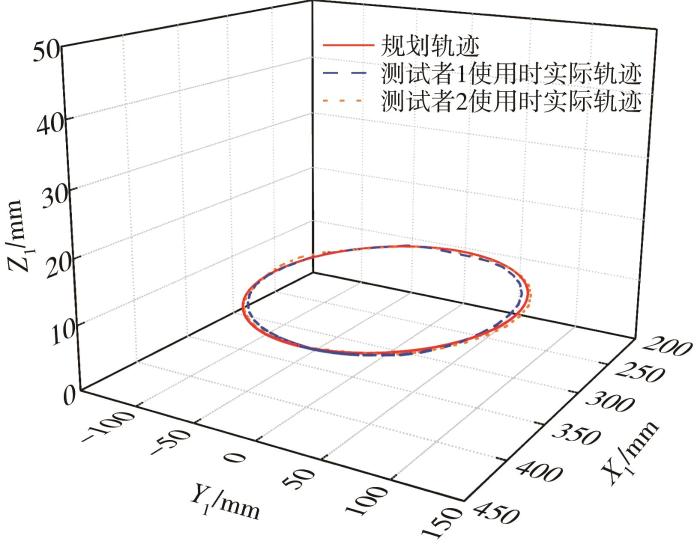
图10
做画圆动作时气动机械臂末端轨迹对比
Fig.10
Trajectory comparison of pneumatic manipulator end during drawing a circle
图11
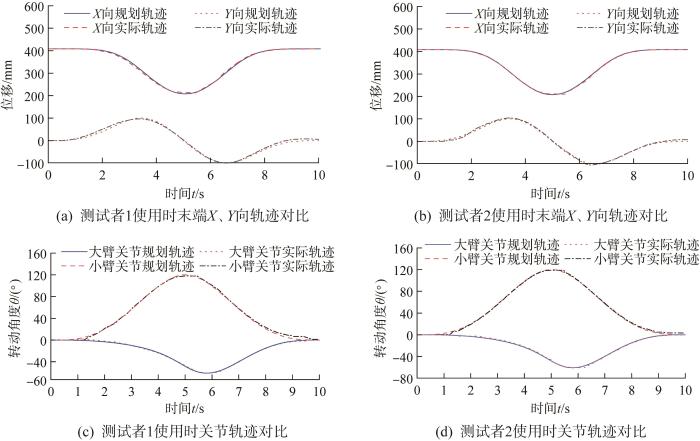
图11
做画圆动作时气动机械臂末端X、Y向轨迹及其关节轨迹对比
Fig.11
Comparison of X and Y directional trajectories of end and joint trajectories of pneumatic manipulator during drawing a circle
表2所示为测试者做画圆动作时气动机械臂的轨迹跟踪误差。其中:在测试者1使用时,气动机械臂末端X、Y向位置的平均误差分别为1.5 mm和4.3 mm,均方根误差分别为1.6 mm和5.4 mm;大、小臂关节转动角度的平均误差分别为0.8°和1.5°,均方根误差分别为0.7°和1.3°。在测试者2使用时,气动机械臂末端X、Y向位置的平均误差分别为1.1 mm和3.5 mm,均方根误差分别为1.4 mm和2.2 mm;大、小臂关节转动角度的平均误差分别为0.7°和1.2°,均方根误差分别为0.6°和0.9°。通过对比各项误差可知,对于不同使用者,气动机械臂的轨迹跟踪误差均较小,均符合系统要求,说明所设计的上肢镜像康复训练机器人系统具有普适性。在实验中,不同人使用时气动机械臂轨迹跟踪误差不同主要是因为体重的影响,测试者2较重,导致气动机械臂阻尼增大,这在一定程度上改善了气动系统的稳定性。结果表明,在机器人辅助的双侧上肢训练中,考虑增加驱动柔性采用的气压驱动关节,在运动过程中的位置精度及轨迹跟踪精度、速度均满足上肢康复训练的要求。
表2 做画圆动作时气动机械臂的轨迹跟踪误差
Table 2
| 测试者 | 末端位置误差/mm | 关节转动角度误差/(°) | ||||||
|---|---|---|---|---|---|---|---|---|
| 平均误差 | 均方根误差 | 平均误差 | 均方根误差 | |||||
| X向 | Y向 | X向 | Y向 | 大臂 | 小臂 | 大臂 | 小臂 | |
| 1 | 1.5 | 4.3 | 1.6 | 5.4 | 0.8 | 1.5 | 0.78 | 1.3 |
| 2 | 1.1 | 3.5 | 1.4 | 2.2 | 0.7 | 1.2 | 0.6 | 0.9 |
4.4 镜像康复训练试验
为实现气动机械臂牵引患肢跟随健肢作同步的镜像运动,首先建立主控计算机中的虚拟环境与仿真机之间的TCP(transmission control protocol,传输控制协议)通信,其次根据动作捕捉设备采集的健肢位姿数据进行镜像运动映射,得到气动机械臂末端的位置信息,然后通过TCP通信传输给仿真机,通过求运动学逆解得到气动机械臂各关节的转动角度,最后控制比例压力阀对气动机械臂各关节进行伺服驱动。
同样由健康人进行镜像康复训练功能的验证。操作者穿戴动作捕捉设备坐在样机前方,一侧手(主手,模拟患者健肢)放在桌面初始位置,另一侧手(从手)抓住气动机械臂末端。对动作捕捉设备进行标定后,主手在桌面有效工作空间内作一系列平面运动,基于采集的位姿信息,通过人机镜像运动映射算法得到气动机械臂末端的轨迹,并与其实际轨迹进行对比。本试验中,操作者主手画方形图案作为康复训练的运动轨迹,利用动作捕捉设备采集相应的位姿信息,气动机械臂运动轨迹由旋转编码器反馈。康复训练时气动机械臂末端的映射轨迹及实际轨迹如图12所示。
图12
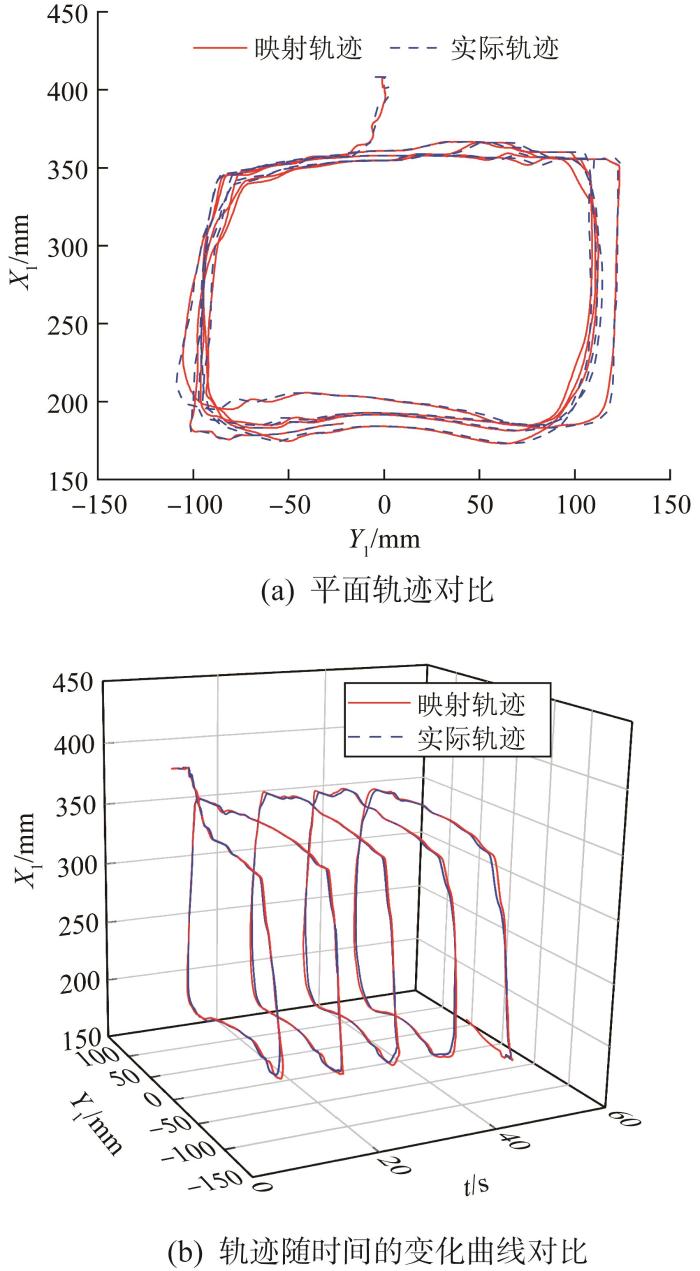
图12
康复训练时气动机械臂末端的轨迹对比
Fig.12
Trajectory comparison of pneumatic manipulator end during rehabilitation training
由图12可知,由于人体上肢运动具有一定的抖动,所映射的期望轨迹是不规则的,但气动机械臂的运动跟踪性能良好,使得偏差在康复训练允许范围之内;气动机械臂的康复动作与主手动作相符,可以较好地进行相同动作的牵引训练。通过对比验证了气动机械臂运动跟踪响应的快速性、稳定性和可行性,表明所设计的人机镜像运动映射算法和控制策略是有效的。
5 结 论
本文开发的体感交互式上肢镜像康复训练机器人系统结构简单,操作方便以及控制方式新颖。患者可以直接通过穿戴动作捕捉设备采集健肢位姿信息来控制气动机械臂运动,从而辅助患者进行双侧肢协同运动的镜像训练,使镜像疗法与机器人辅助训练相辅相成。经试验验证,动作捕捉设备获取人体上肢位姿信息后,通过人机镜像运动映射算法能够有效地将健肢位姿信息转换为气动机械臂的运动轨迹,并牵引患肢完成康复训练。所设计的PD+速度前馈补偿控制算法实现了气压机械臂的运动控制,其在运动过程中的轨迹跟踪误差较小,运动平稳,能满足康复训练的要求。后续将在主动康复训练模式下对辅助力控制和机器人阻抗控制方面开展进一步研究。由于目前仍处于实验室试验阶段,并未开展临床试验,为更全面地评价该上肢镜像康复训练机器人系统的效果,还有待进一步开展临床试验。
参考文献
康复机器人结合镜像疗法对脑卒中偏瘫患者上肢功能的效果
[J].
Effects of robot-assisted therapy combined with mirror therapy on upper limbs rehabilitation in patients with hemiplegia after stroke
[J].DOI:10.3969/j.issn.1006-9771.2019.06.016 [本文引用: 1]
镜像视觉反馈在脑卒中患者上肢功能障碍康复中的应用
[J].
Application of mirror visual feedback in rehabilitation of upper limb dysfunction in stroke patients
[J].DOI:10.3969/j.issn.1001-1242.2016.03.024 [本文引用: 1]
脑卒中偏瘫上肢功能障碍康复治疗研究进展
[J].
Research progress in rehabilitation treatment of upper limb dysfunction in stroke patients with hemiplegia
[J].DOI:10.16190/j.cnki.45-1211/r.2018.07.034 [本文引用: 1]
镜像集成疗法的上肢康复训练技术研究进展
[J].
Advance of mirror integrated therapy for upper limbs rehabilitation (review)
[J].DOI:10.3969/j.issn.1006-9771.2017.01.014 [本文引用: 1]
Nonimmersive virtual reality mirror visual feedback therapy and its application for the treatment of complex regional pain syndrome: an open-label pilot study
[J].
Computerized mirror therapy with augmented reflection technology for stroke rehabilitation: a feasibility study in a rehabilitation center
[C]//
Robotic mirror therapy system for functional recovery of hemiplegic arms
[J].
镜像视觉反馈疗法在康复训练中的研究进展
[J].
Mirror visual feedback therapy for rehabilitation training (review)
[J].DOI:10.3969/j.issn.1006-9771.2017.12.007 [本文引用: 1]
Kinematic data analysis for post-stroke patients following bilateral versus unilateral rehabilitation with an upper limb wearable robotic system
[J].
镜像疗法在中老年脑卒中患者功能恢复中的应用现状
[J].
Application status of mirror therapy in functional recovery of middle-aged and elderly stroke patients
[J].DOI:10.3969/j.issn.1008-8296.2015-23 [本文引用: 1]
镜像康复机器人在偏瘫康复中的应用研究
[J].
Application research of mirror rehabilitation robot in hemiplegia rehabilitation
[J].DOI:10.3969/j.issn.1001-1242.2020.08.003 [本文引用: 1]
Robotics-assisted mirror rehabilitation therapy: a therapist-in-the-loop assist-as-needed architecture
[J].
气动上肢康复机器人伺服控制和运动规划研究
[J].
Servo control and motion planning of pneumatic upper-limb rehabilitation robot
[J].DOI:10.11832/j.issn.1000-4858.2020.04.011 [本文引用: 1]
体感控制的上肢外骨骼镜像康复机器人系统
[J].
Upper-limb exoskeletal mirror rehabilitation robot systems based on motion sensing control
[J].DOI:10.3969/j.issn.1004-132X.2018.20.014 [本文引用: 1]
基于无线惯性传感器的人体动作捕获方法
[J].
Human motion capture using wireless inertial sensors
[J].DOI:10.3785/j.issn.1008-973X.2012.02.016 [本文引用: 1]
人手到灵巧手的运动映射实现
[J].
Motion mapping of human hand to dexterous robotic hands
[J].DOI:10.3321/j.issn:1002-0446.2003.05.013 [本文引用: 1]
外骨骼式遥操作主手设计及主从异构映射算法研究
[J].
Design of exoskeletal teleoperation master device and research on master-slave isomerism mapping algorithm
[J].DOI:10.13973/j.cnki.robot.200077 [本文引用: 1]
异构遥操作仿人机械臂灵巧作业控制
[J].
Dexterous work control of humanoid manipulator isomerism heterogeneous teleoperation
[J].DOI:10.13873/J.1000-9787(2018)07-0039-03 [本文引用: 1]
异构型遥操作系统的定位与接触控制研究
[J].
Research on location and contact control of heterogeneous teleoperation systems
[J].DOI:10.3969/j.issn.1001-0548.2018.04.010 [本文引用: 1]
基于KUKA工业机器人的遥操作控制系统设计与异构主从控制方法研究
[J].
Design of teleoperation system of KUKA industrial robot and the control algorithm with heterogeneous master/slave structure
[J].DOI:10.15961/j.jsuese.2016.01.027 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}