| Robotic and Mechanism Design |
|

|
|
|
| Research on path planning for composite robot |
Chen LI( ),Chunjing SHI,Jinquan LI() ),Chunjing SHI,Jinquan LI() |
| School of Mechanical Engineering, Shenyang University of Technology, Shenyang 110000, China |
|
|
|
Abstract To address the inefficiency and path redundancy in the path planning of composite robots in complex and unknown environments, a novel algorithm integrating an improved A* algorithm with the dynamic window approach (DWA) was proposed. Firstly, by introducing a dynamic inertia weight coefficient, the heuristic function of the A* algorithm was adjusted in real time to achieve acceleration in the early stage of the search and global optimal approximation in the later stage. Meanwhile, the time threshold mechanism for accessing Open List nodes was introduced to prevent the algorithm from falling into local optimal solutions. Grid maps with different sizes were constructed, and the improved A* algorithm was verified through simulation using MATLAB software. Secondly, the improved A* algorithm was integrated with DWA to achieve the synergy of dynamic obstacle avoidance and global path following. Finally, the improved A*-DWA fusion algorithm was experimentally verified in both the ROS (robot operating system) simulation environment and the real environment. The experimental results showed that, compared with the traditional A*-DWA fusion algorithm, the use of the improved A*- DWA fusion algorithm could shorten the planned path by 27.57%, reduce the turning points by 40%, shorten the time consumption by 31.03%, and make the speed variation of the composite robot more stable. The improving A*-DWA fusion algorithm not only has the performance of global optimal path planning, but also exhibits dynamic adaptability, enabling the robot to have a high success rate in obstacle avoidance and meeting the requirements of path planning for composite robots in complex and unknown environments.
|
|
Received: 31 March 2025
Published: 31 October 2025
|
|
|
|
Corresponding Authors:
Jinquan LI
E-mail: 1658881967@qq.com;li_jinquan@163.com
|
复合机器人路径规划研究
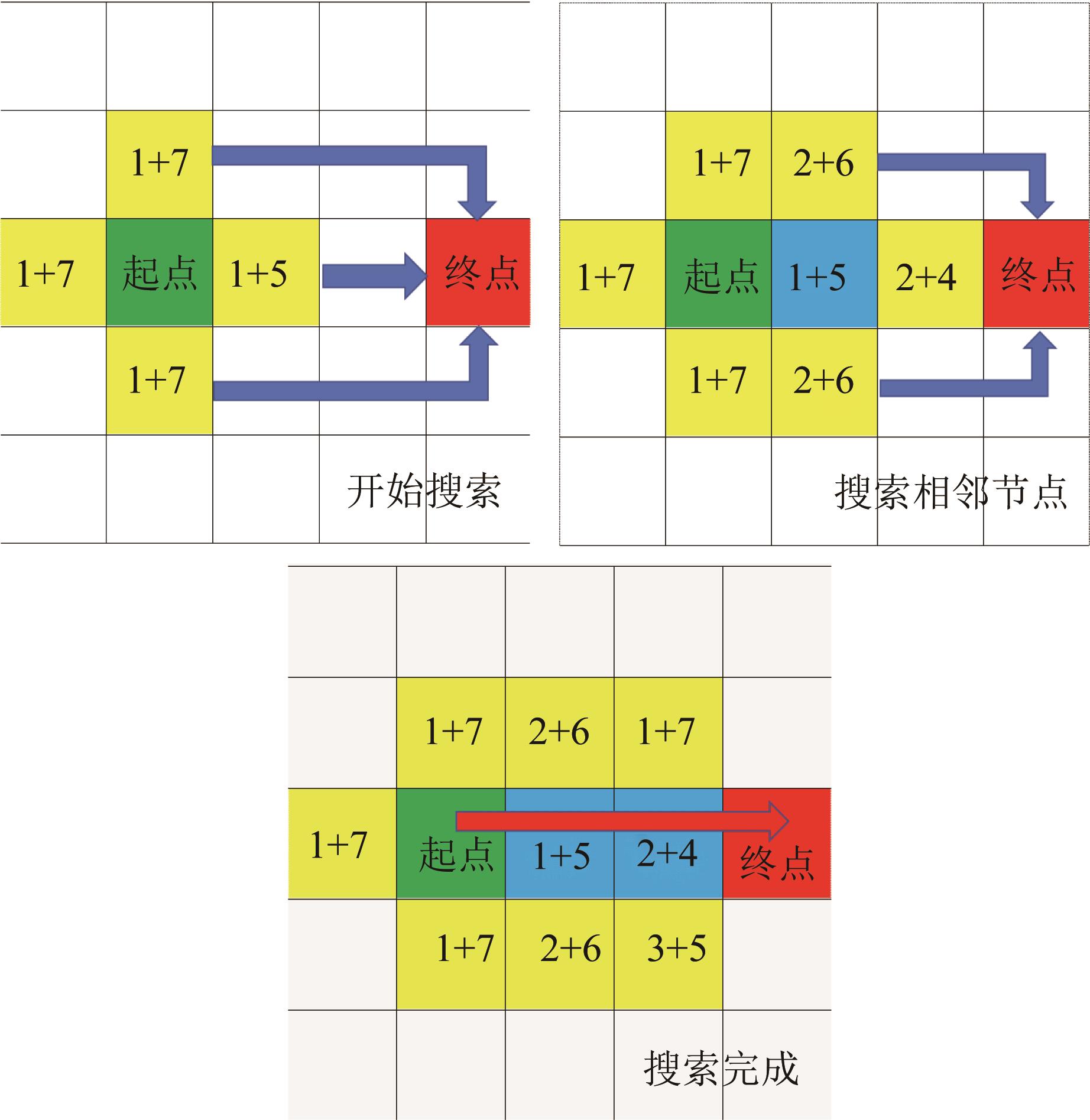
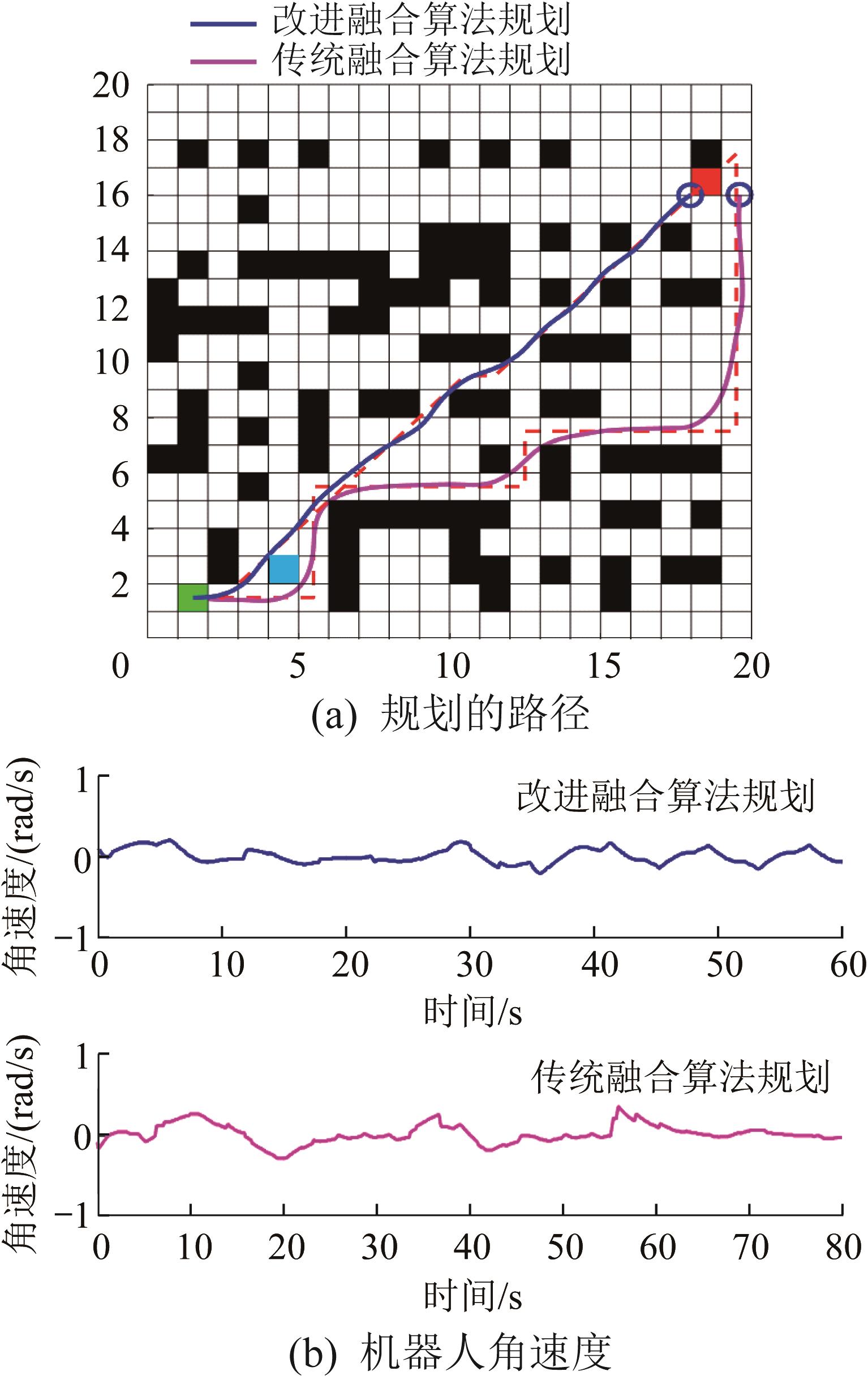
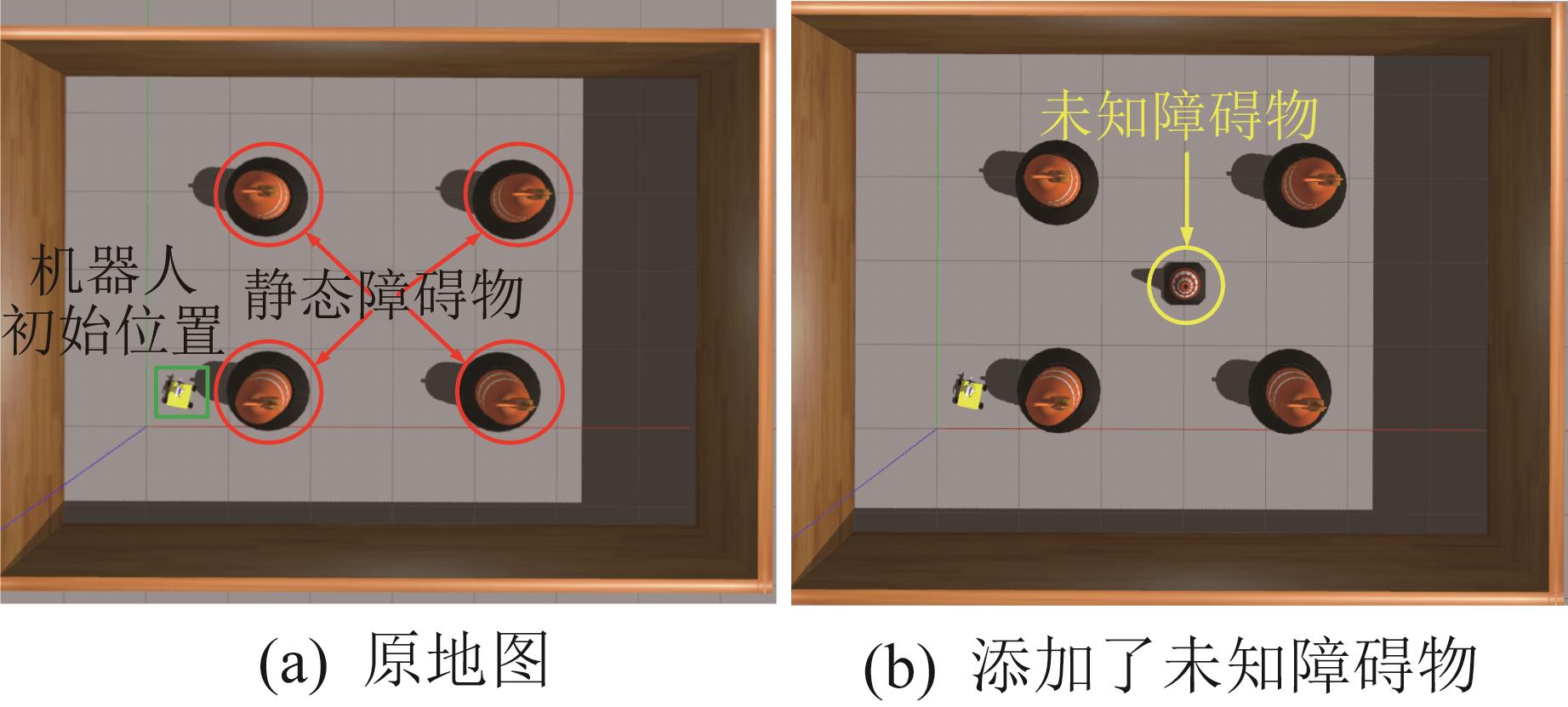
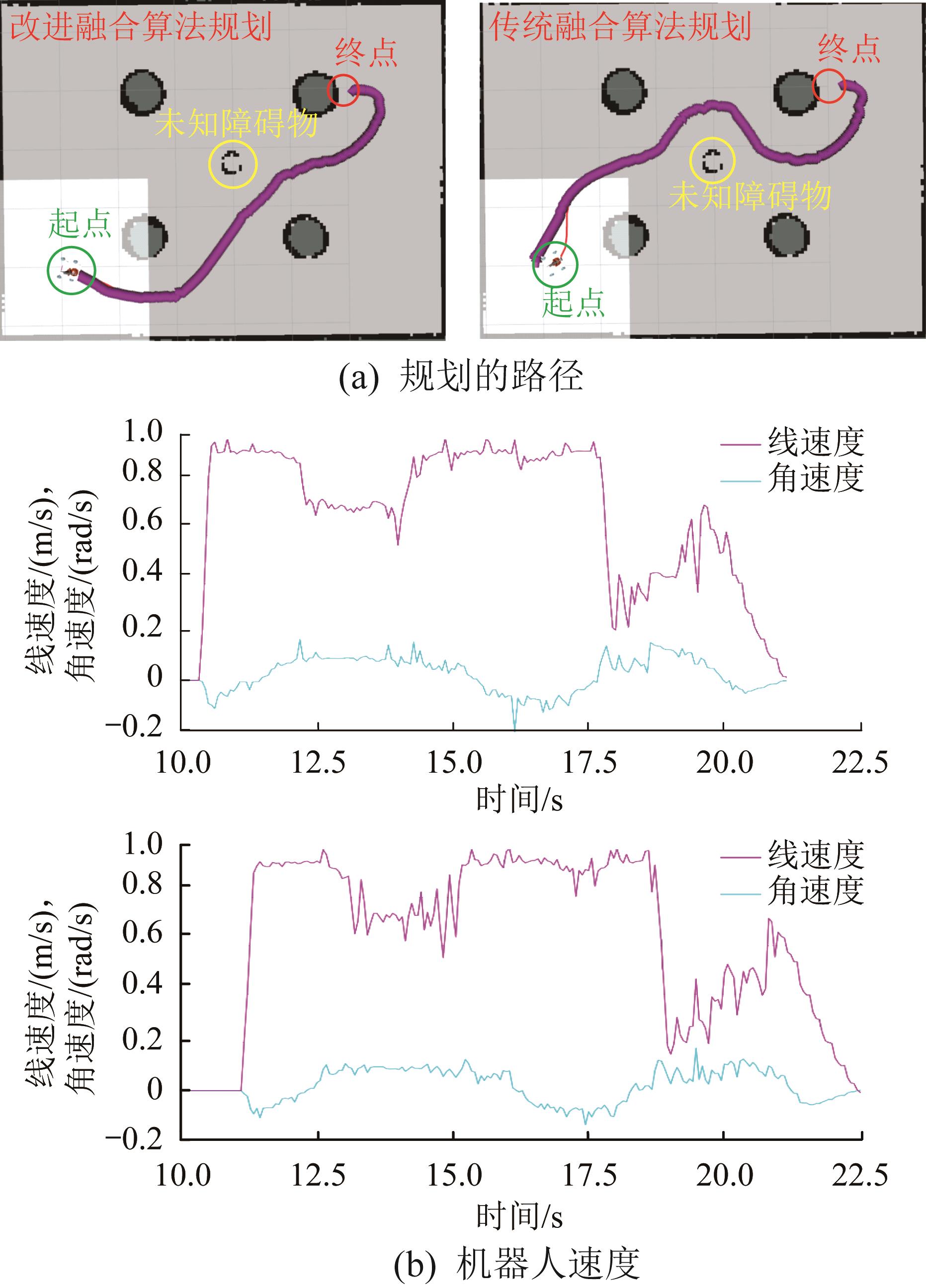
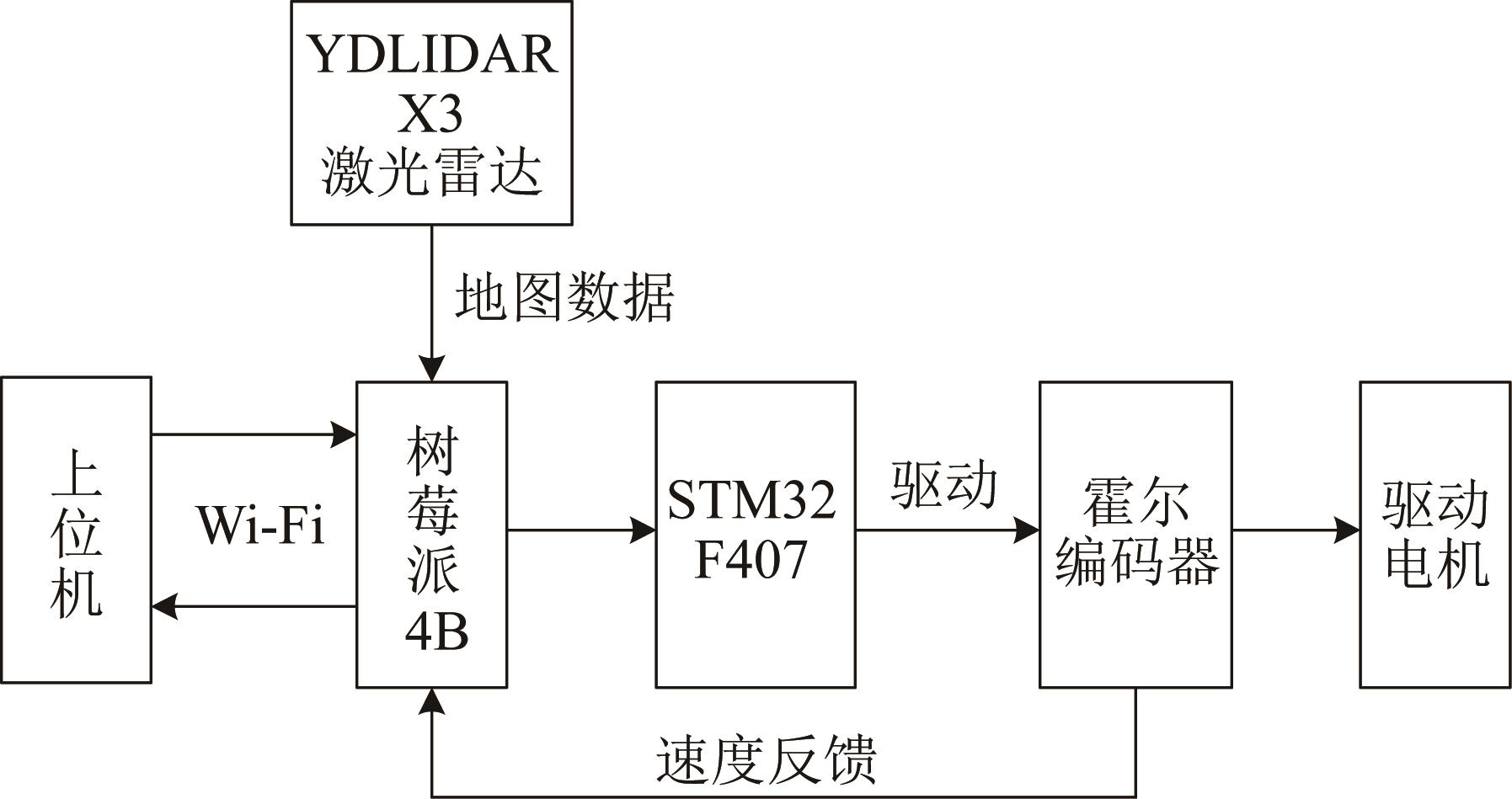
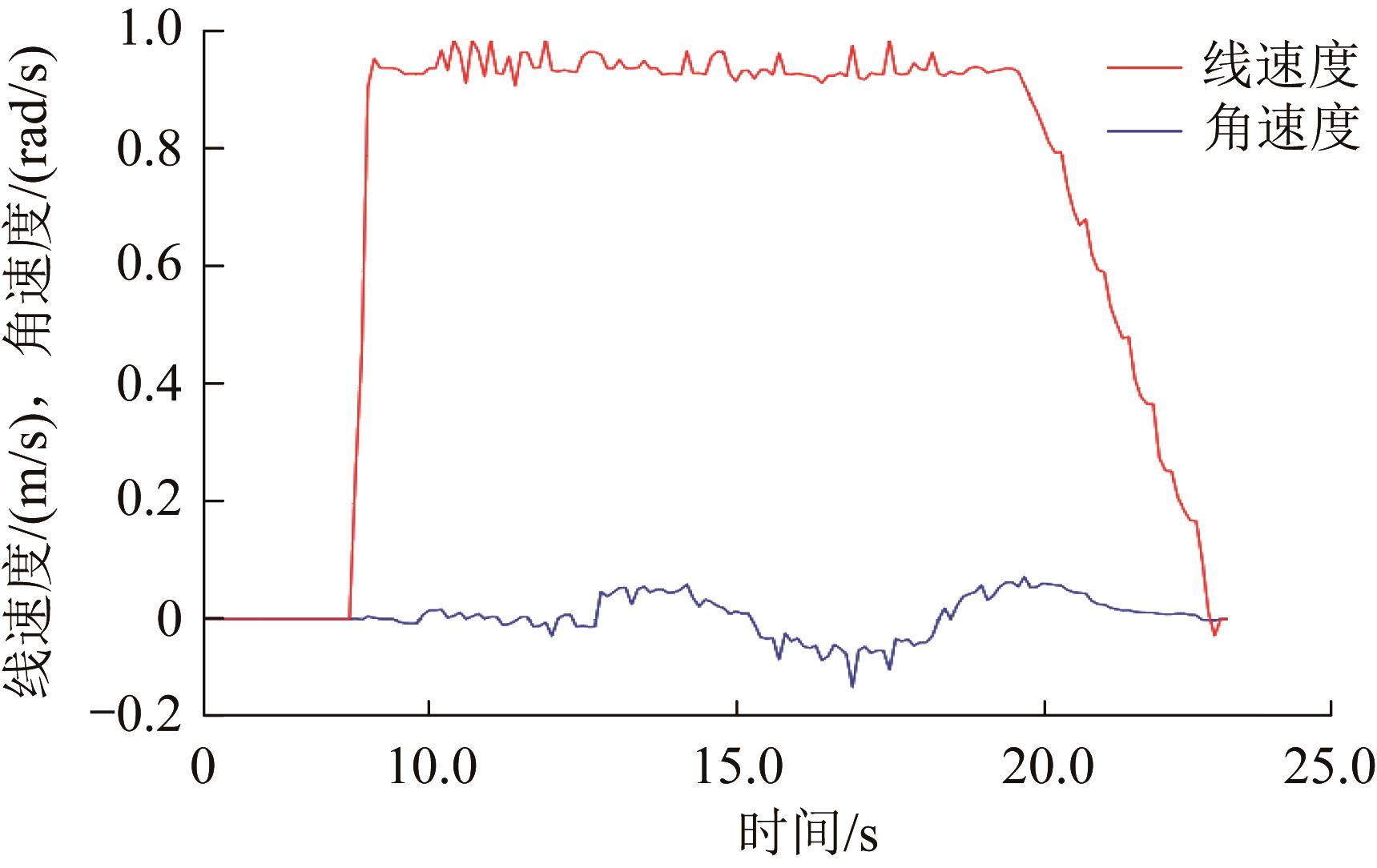
针对在复杂未知环境中复合机器人路径规划效率低下、路径冗余等问题,提出了一种结合改进A*算法与动态窗口法(dynamic window approach, DWA)的新型算法。首先,通过引入动态惯性权重系数,对A*算法的启发式函数进行实时调整,以实现搜索初期的加速和后期的全局最优逼近。同时,引入Open List节点访问时间阈值机制,以避免算法陷入局部最优解,并构建了不同尺寸的栅格地图,采用MATLAB软件对改进A*算法进行了仿真验证。其次,将改进A*算法与DWA进行融合,以实现动态避障与全局路径跟随的协同。最后,在ROS(robot operating system,机器人操作系统)仿真环境和真实环境中对改进A*-DWA融合算法进行了实验验证。实验结果显示,相较于传统A*-DWA融合算法,采用改进A*-DWA融合算法可使规划路径缩短27.57%,转折点减少40%,耗时缩短31.03%,复合机器人的速度变化更稳定。改进A*-DWA融合算法不仅具有全局最优路径规划性能,还具备动态适应性,使机器人具有较高的避障成功率,能够满足复杂未知环境下复合机器人路径规划的需求。
关键词:
路径规划,
机器人操作系统环境,
复合机器人,
A*算法,
动态窗口法
|
|
| [[1]] |
王晨旭, 熊智, 杨闯. 未知复杂环境下基于兴趣驱动的类脑自主导航技术[J]. 航空科学技术, 2024, 35(2): 1-13.
WANG C X, XIONG Z, YANG C. Interest-driven brain-inspired autonomous navigation technology in unknown complex environments[J]. Aeronautical Science & Technology, 2024, 35(2): 1-13.
|
|
|
| [[2]] |
ZHOU X W, YAN J W, YAN M, et al. Path planning of rail-mounted logistics robots based on the improved Dijkstra algorithm[J]. Applied Sciences, 2023, 13(17): 9955.
|
|
|
| [[3]] |
李文韬, 陈欣, 钱佳钰. 基于新型混合策略人工蜂群算法的无人机航迹规划研究[J]. 飞行力学, 2025, 43(2): 89-94.
LI W T, CHEN X, QIAN J Y. Research on UAV trajectory planning based on a novel hybrid strategy artificial bee colony algorithm[J]. Flight Dynamics, 2025, 43(2): 89-94.
|
|
|
| [[4]] |
梅梦磊, 陈顺洪, 菅永坤, 等. 基于双向搜索改进A*算法的无人艇全局路径规划[J]. 舰船科学技术, 2025, 47(5): 97-102.
MEI M L, CHEN S H, JIAN Y K, et al. Improved A* algorithm based on bidirectional search for global path planning of unmanned surface vehicles[J]. Ship Science and Technology, 2025, 47(5): 97-102.
|
|
|
| [[5]] |
马自勇, 朱星光, 马立东. 改进A*和DWA的机器人路径规划研究[J]. 现代电子技术, 2024, 47(20): 177-186.
MA Z Y, ZHU X G, MA L D. Research on robot path planning based on improved A* and DWA[J]. Modern Electronics Technique, 2024, 47(20): 177-186.
|
|
|
| [[6]] |
张晓倩, 黄磊, 石雨婷, 等. 基于蚁群与DWA融合的移动机器人动态路径规划[J]. 组合机床与自动化加工技术, 2024(1): 9-13.
ZHANG X Q, HUANG L, SHI Y T, et al. Dynamic path planning method of mobile robot based on ant colony and DWA fusion[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2024(1): 9-13.
|
|
|
| [[7]] |
王慧锬, 陈坤, 何丽, 等. 融合改进A*算法和人工势场法的机器鱼路径规划[J]. 电子测量技术, 2025, 48(13): 58-72.
WANG H T, CHEN K, HE L, et al. Path planning of robotic fish by combining improved A* algorithm and artificial potential field method[J]. Electronic Measurement Technology, 2025, 48(13): 58-72.
|
|
|
| [[8]] |
ALLUS A, UNEL M. Angle-based multi-goal ordering and path-planning using an improved A-star algorithm[J]. Robotics and Autonomous Systems, 2025, 190: 105001.
|
|
|
| [[9]] |
彭斌, 王力, 杨思霖. 基于改进A*算法和动态窗口算法的自动导引小车轨迹规划[J]. 计算机应用, 2022, 42(S1): 347-352.
PENG B, WANG L, YANG S L. Trajectory planning of AGV based on improved A* algorithm and dynamic window algorithm[J]. Journal of Computer Applications, 2022, 42(S1): 347-352.
|
|
|
| [[10]] |
毕竟, 刘俊. 结合DC-A*与FE-DWA的巡检机器人路径规划方法[J/OL]. 计算机工程与应用, 2025: 1-16. [2025-03-22]. .
BI J, LIU J. Path planning method of inspection robot combining DC-A* and FE-DWA[J/OL]. Computer Engineering and Applications, 2025: 1-16. [2025-03-22]. .
|
|
|
| [[11]] |
曾宪阳, 张加旺. 改进A算法融合DWA机器人路径规划研究[J]. 电子测量技术, 2025, 48(6): 20-27.
ZENG X Y, ZHANG J W. Path planning for robots with improved A algorithm and fused DWA[J]. Electronic Measurement Technology, 2025, 48(6): 20-27.
|
|
|
| [[12]] |
王素芳, 安传旭, 蒋文婷, 等. 基于Eband算法的运动控制平滑性优化[J]. 计算机工程与设计, 2023, 44(2): 622-628.
WANG S F, AN C X, JIANG W T, et al. Optimization of motion control smoothness based on Eband algorithm[J]. Computer Engineering and Design, 2023, 44(2): 622-628.
|
|
|
| [[13]] |
黄小霞, 阳波, 向鑫, 等. 基于改进行为克隆算法的机器人运动控制策略[J/OL]. 计算机应用研究, 1-9. [2025-03-22]. .
HUANG X X, YANG B, XIANG X, et al. Robotic motion control strategy based on an improved behavior alcloningal algorithm[J/OL]. Computer Application Research, 1-9. [2025-03-22]. .
|
|
|
| [[14]] |
杨玮, 杨思瑶, 张子涵. 考虑冲突避免的多AGV路径规划研究[J]. 包装工程, 2023, 44(23): 181-190.
YANG W, YANG S Y, ZHANG Z H. Multi-AGV path planning considering conflict avoidance[J]. Packaging Engineering, 2023, 44(23): 181-190.
|
|
|
| [[15]] |
黄金源, 陈熙源. 基于改进A*与DWA的机器人融合算法研究[J]. 传感技术学报, 2024, 37(12): 2043-2049.
HUANG J Y, CHEN X Y. Research on robot fusion algorithm based on improved A* and DWA[J]. Chinese Journal of Sensors and Actuators, 2024, 37(12): 2043-2049.
|
|
|
| [[16]] |
王帅. 动态环境下的无人机路径规划及避障系统设计[D]. 重庆: 重庆大学, 2023.
WANG S. UAV path planning and obstacle avoidance system in dynamic environment design[D]. Chongqing: Chongqing University, 2023.
|
|
|
| [[17]] |
廖功铭, 任鸿翔, 王德龙, 等. 融合改进A*与VO算法的船舶避碰策略研究[J]. 舰船科学技术, 2025, 47(3): 32-38.
LIAO G M, REN H X, WANG D L, et al. Research on ship collision avoidance strategy based on improved A* and VO algorithm[J]. Ship Science and Technology, 2025, 47(3): 32-38.
|
|
|
| [[18]] |
白俊峰, 白一辰, 席嘉璐, 等. 基于改进A*算法的车间物料配送路径规划[J]. 吉林大学学报(理学版), 2024, 62(6): 1401-1410.
BAI J F, BAI Y C, XI J L, et al. Workshop material distribution path planning based on improved A* algorithm[J]. Journal of Jilin University (Science Edition), 2024, 62(6): 1401-1410.
|
|
|
| [[19]] |
覃超, 唐东林, 游东潘, 等. 基于改进RTAB-Map算法的爬壁机器人导航研究[J]. 工程设计学报, 2025, 32(1): 32-41.
QIN C, TANG D L, YOU D P, et al. Research on navigation of wall-climbing robot based on improved RTAB-Map algorithm[J]. Chinese Journal of Engineering Design, 2025, 32(1): 32-41.
|
|
|
| [[20]] |
杨振, 李俊丽, 杨立炜, 等. 安全性A*融合DWA的分布式多移动机器人路径规划方法[J]. 控制工程, 2024, 31(12): 2284-2295.
YANG Z, LI J L, YANG L W, et al. Distributed multi-mobile robots path planning method based on safe A* fused with dynamic window approach[J]. Control Engineering of China, 2024, 31(12): 2284-2295.
|
|
|
| [[21]] |
冯浩然, 吴瑞明, 傅阳, 等. 基于ROS与融合算法的机器人路径规划研究[J]. 机床与液压, 2022(9): 55-60.
FENG H R, WU R M, FU Y, et al. Research on robot path planning based on ROS and fusion algorithm[J]. Machine Tool and Hydraulic Pressure, 2022(9): 55-60.
|
|
|
| [[22]] |
牛继高, 寇晓辉, 侯军凯. A*和时间弹性带算法的自主移动机器人路径规划[J]. 中原工学院学报, 2025, 36(2): 24-33.
NIU J G, KOU X H, HOU J K. Autonomous mobile robot path planning by integrating A* and time elastic band algorithm[J]. Journal of Zhongyuan University of Technology, 2025, 36(2): 24-33.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|