| Theory and Method of Mechanical Design |
|

|
|
|
| Geometric parameter measurement method for soft robotic arms based on binocular vision |
Shen SHU( ),Jialiang WANG,Junfeng HU(),Yu ZHANG,Kai CHU,Hao ZHOU,Mingwei CAI ),Jialiang WANG,Junfeng HU(),Yu ZHANG,Kai CHU,Hao ZHOU,Mingwei CAI |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
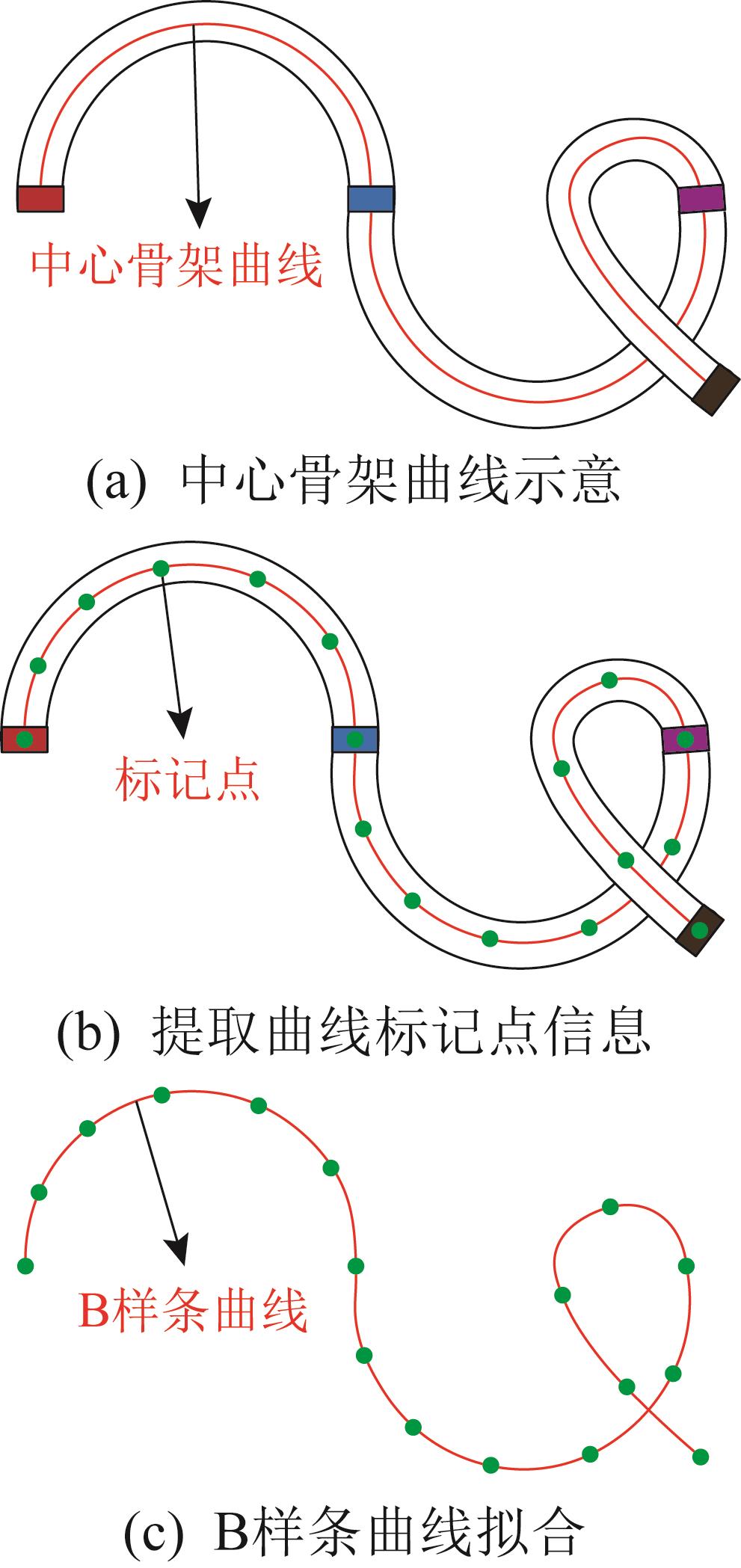
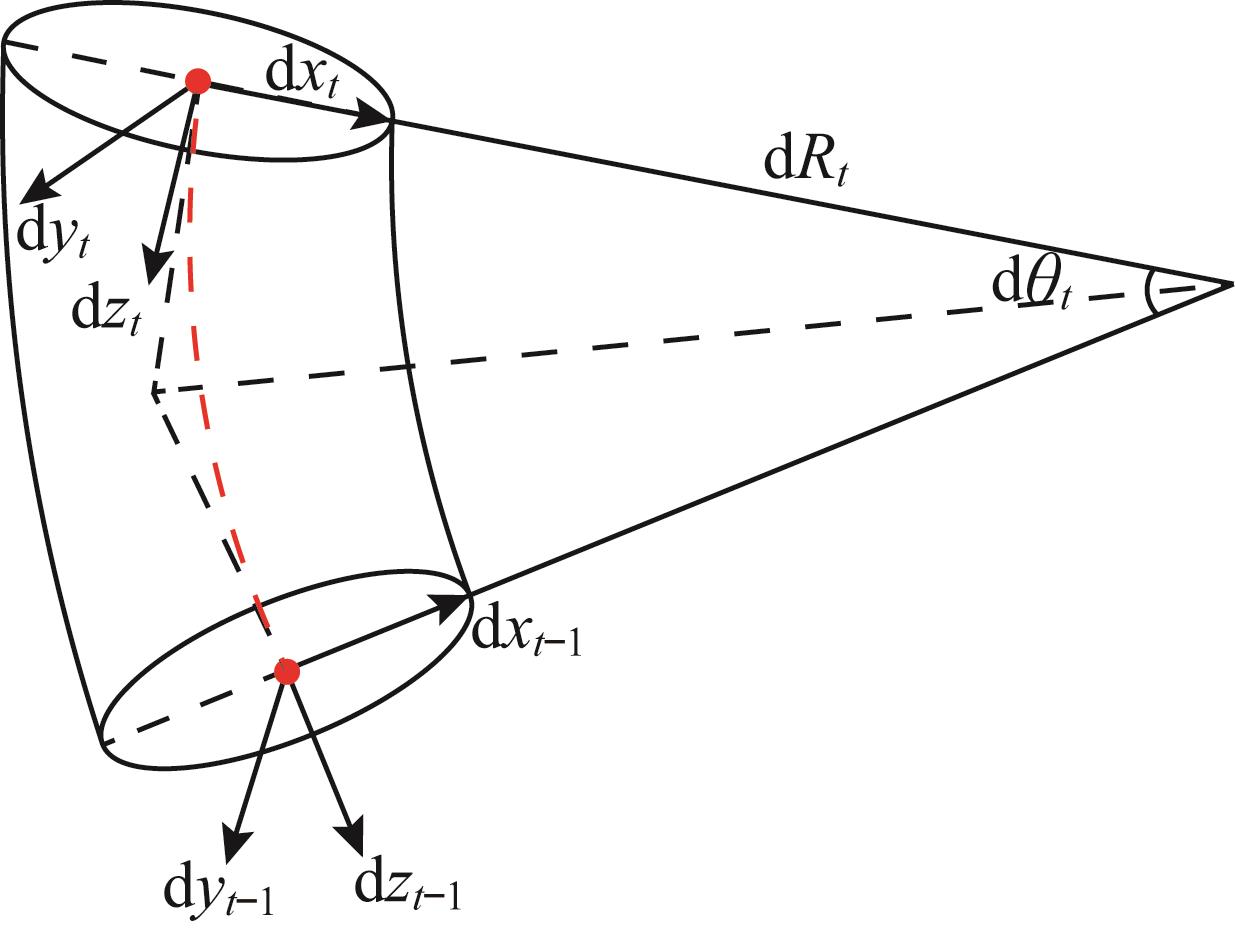
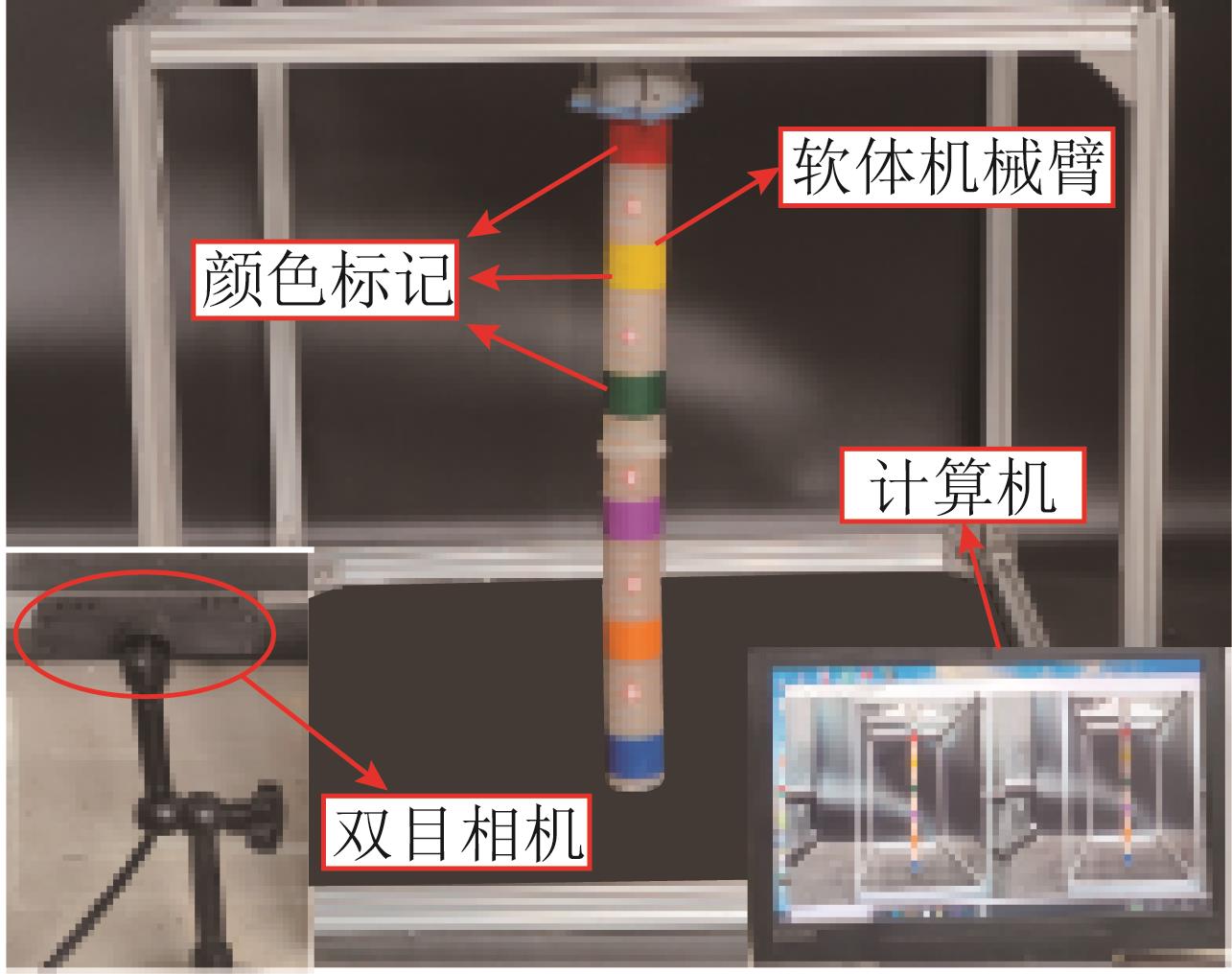
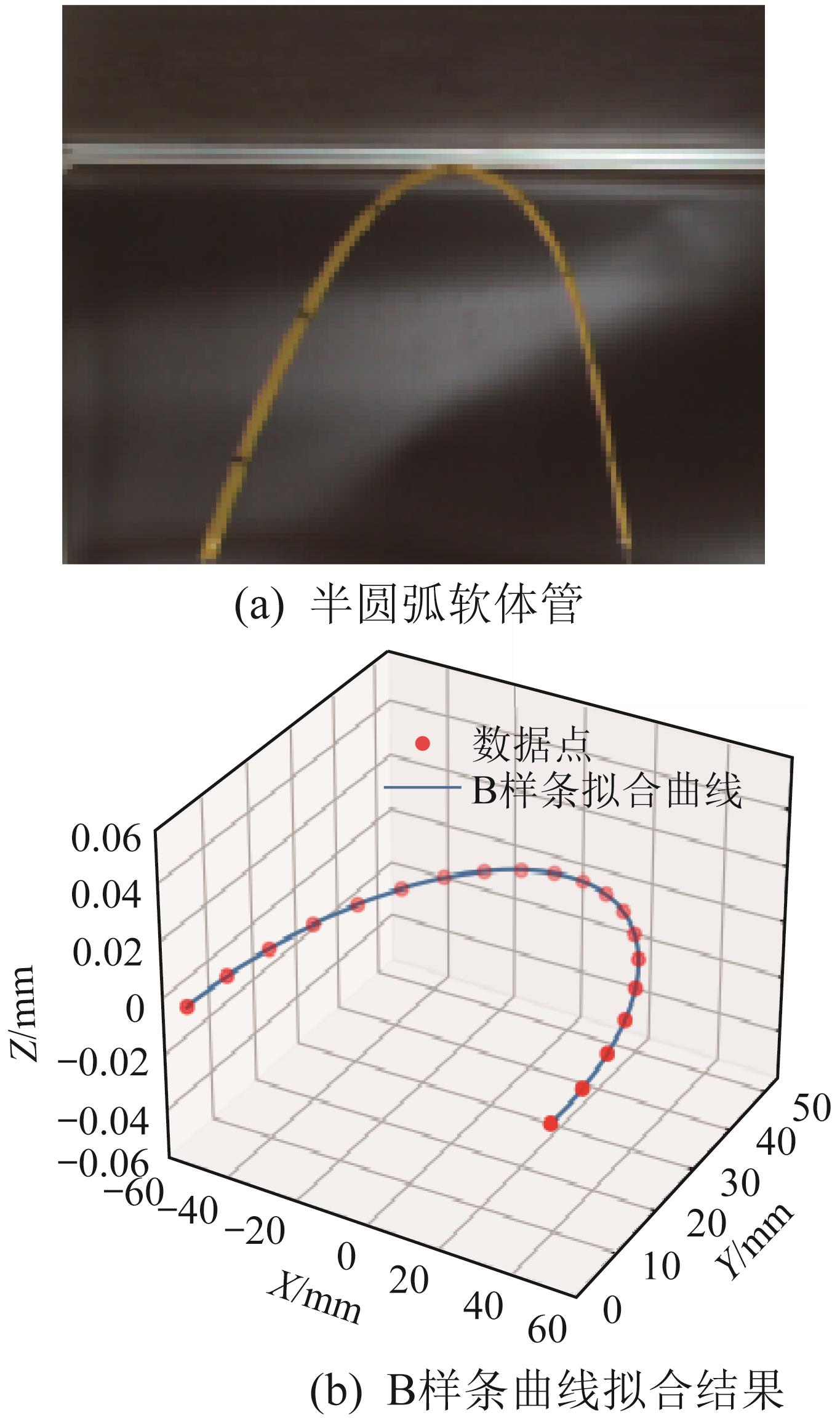
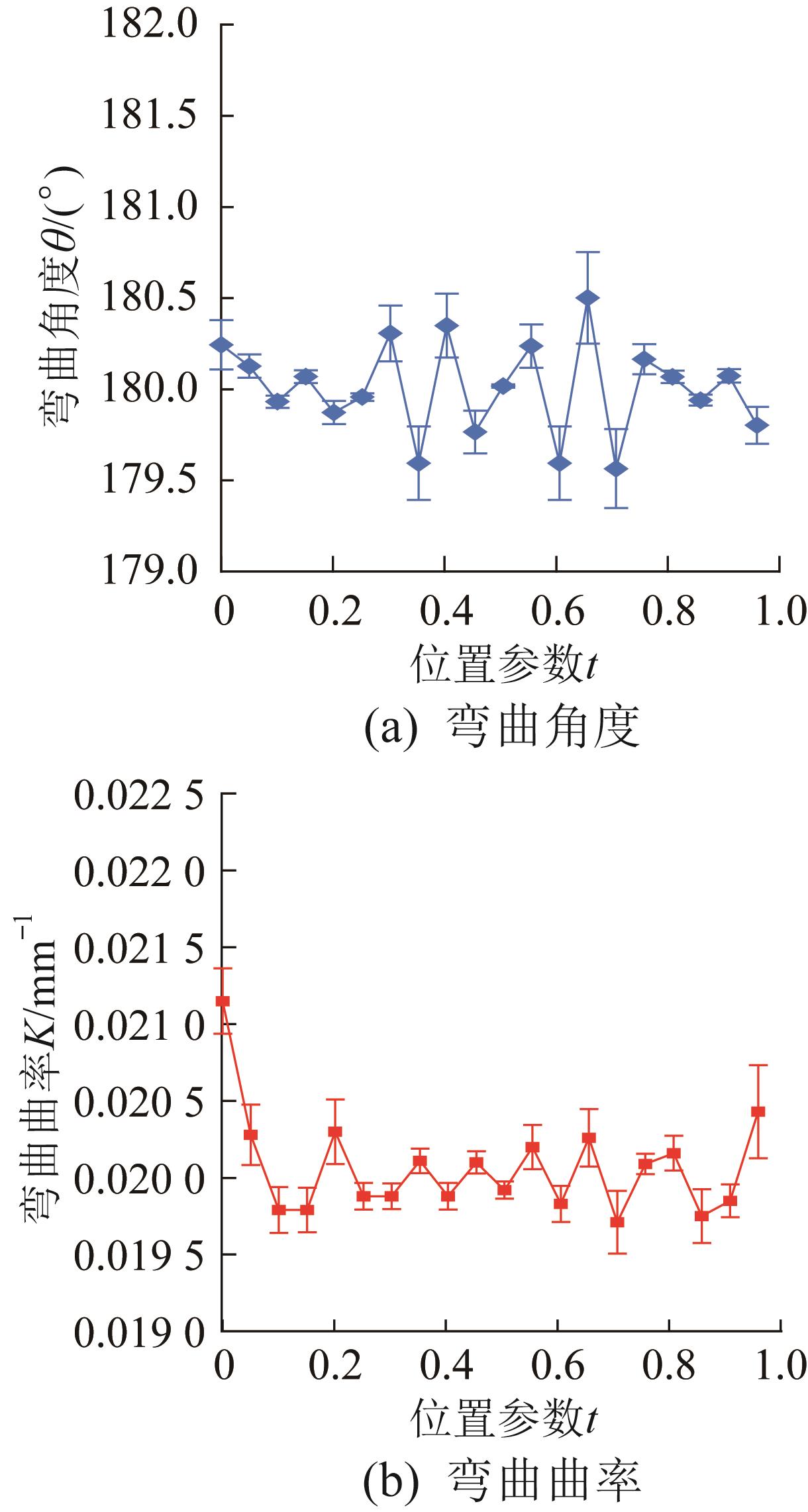
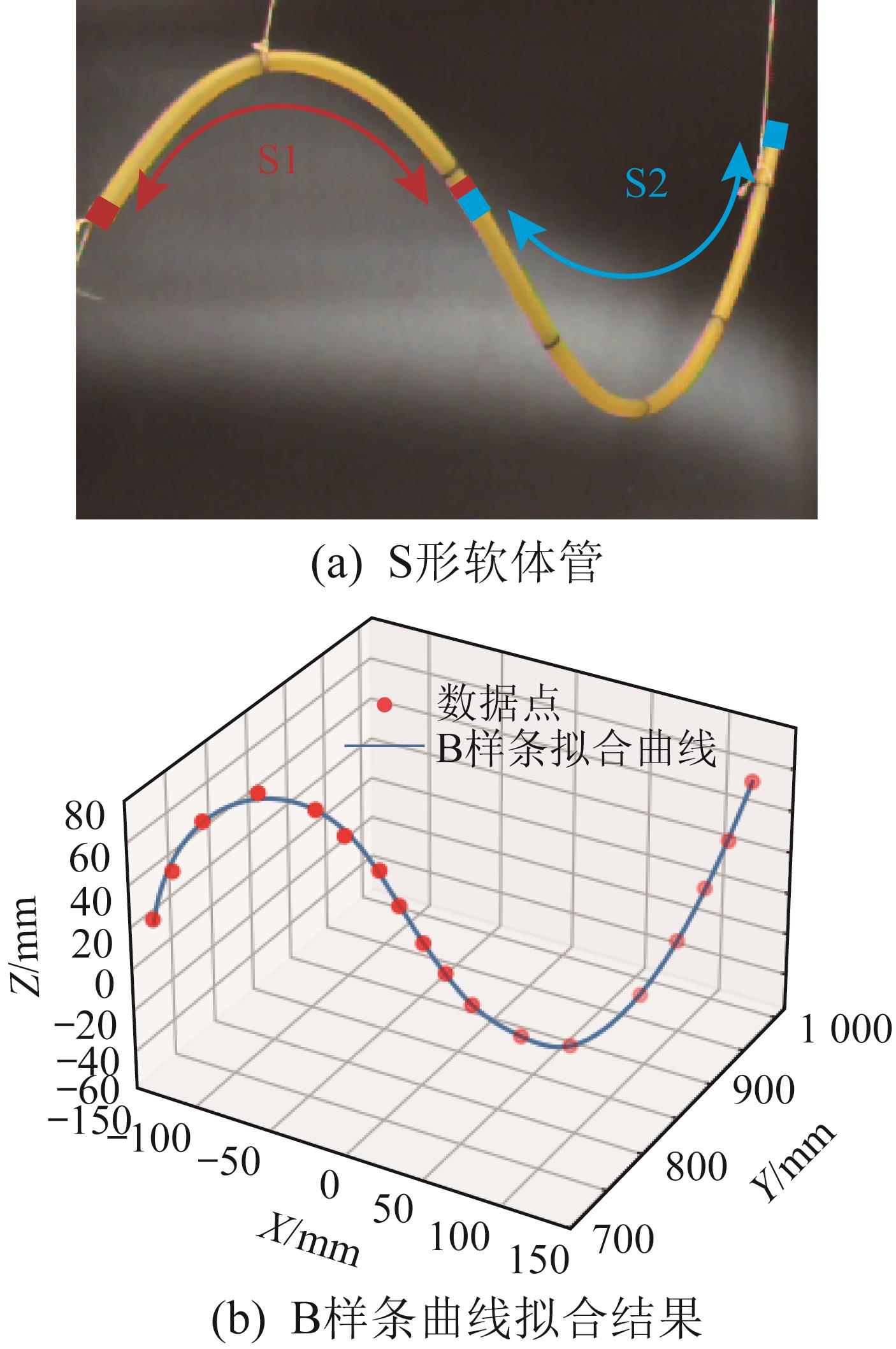
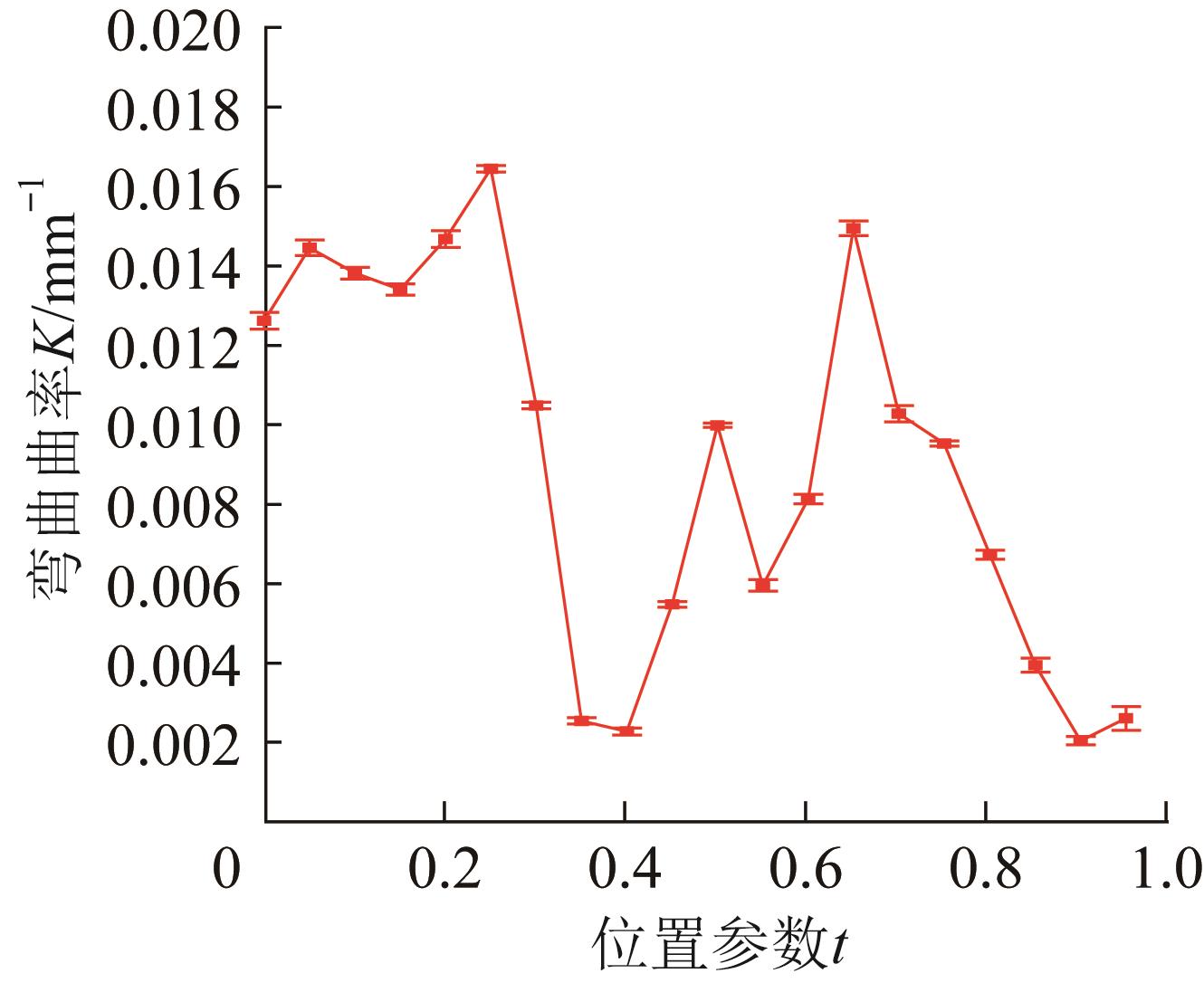
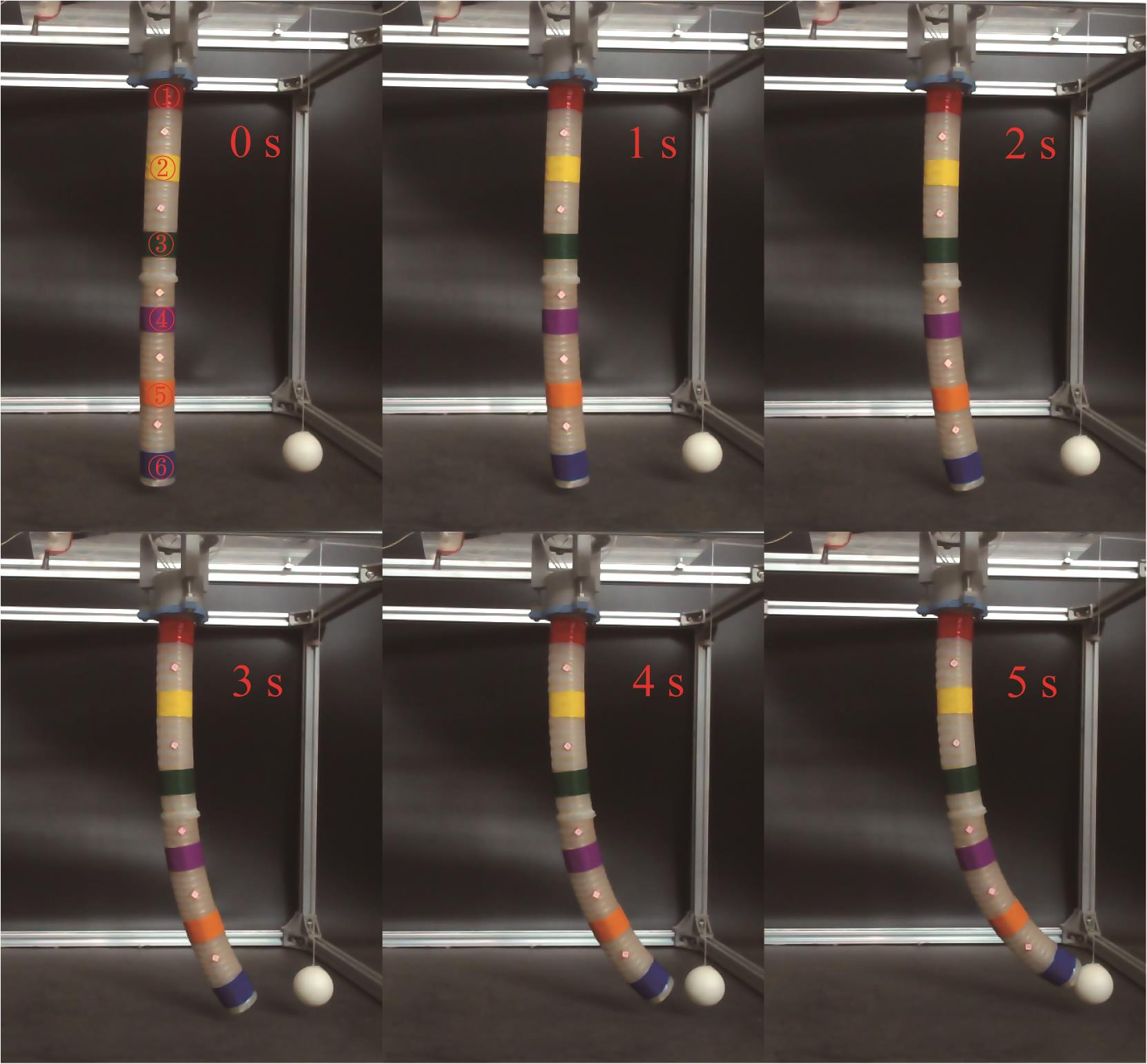
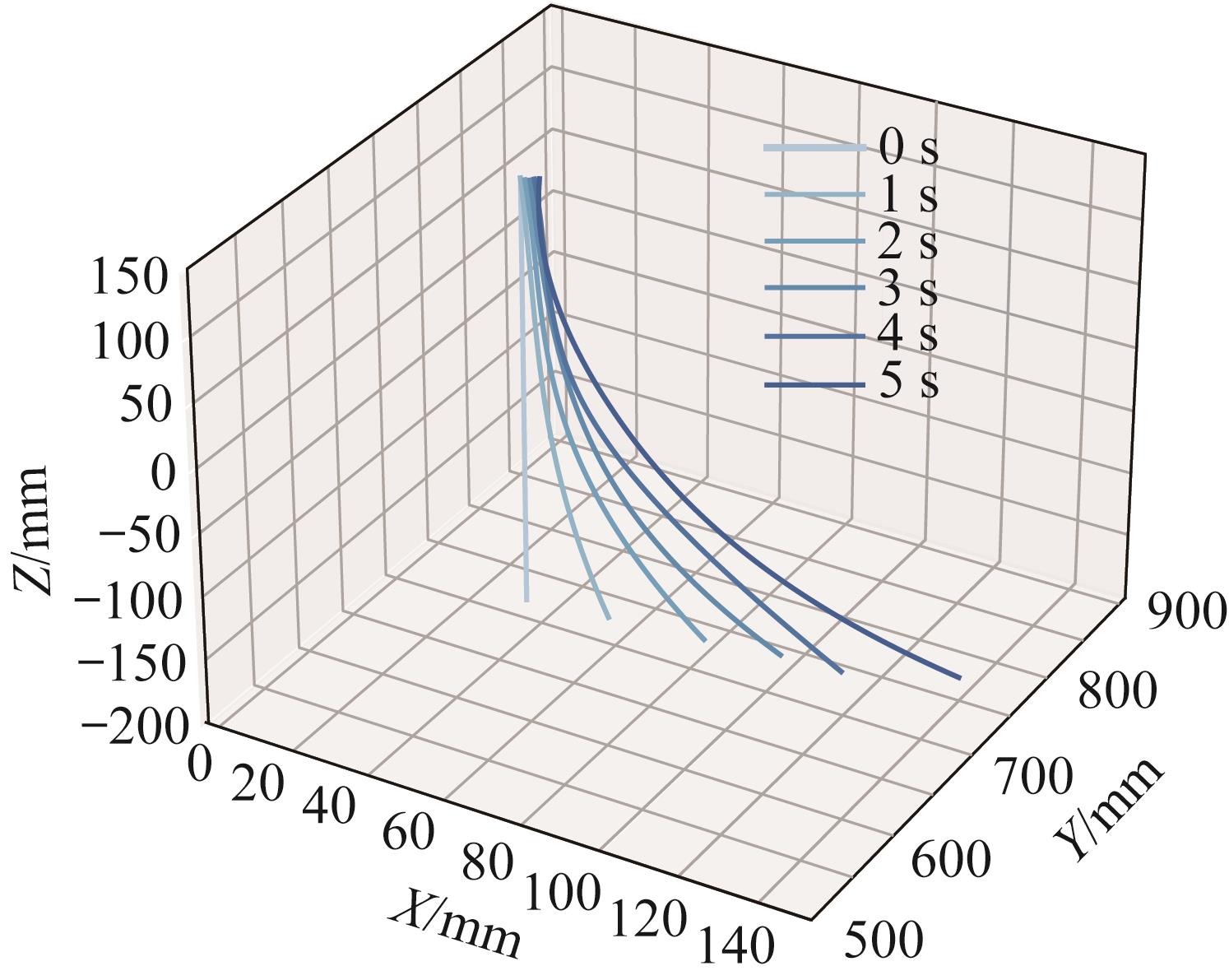
Abstract Due to the inherent compliance and low stiffness of soft robotic arms, they exhibit complex morphological changes during spatial motion, making existing measurement methods inadequate for pose measurement of such robotic arms. To solve the above problems, a novel method combining binocular vision technology and B-spline curve fitting is proposed to accurately measure the geometric parameters of soft robotic arms. This method extracted the three-dimensional information of the central skeleton of the soft robotic arm through a binocular vision system and employed the cubic B-spline curve for three-dimensional shape reconstruction, thereby obtaining the key geometric parameters of the soft robotic arm. To validate the effectiveness of the proposed method, geometric parameter measurements were conducted on soft robotic arms with arc-shaped, S-shaped and L-shaped bends. The measurement results showed that the average bending curvature error of the robotic arm moving on a plane was 0.198%, and the average bending angle error was 0.159%. The average bending angle error of the robotic arm moving in three-dimensional space was 1.340%. In addition, this measurement method could be extended to dynamic measurements and accurately measure the geometric parameters of soft robotic arms even in the presence of visual occlusions. The measurement method based on binocular vision and B-spline curve fitting can provide a new idea for the parameter measurement of soft robotic arms.
|
|
Received: 08 July 2024
Published: 31 October 2025
|
|
|
|
Corresponding Authors:
Junfeng HU
E-mail: 1414401390@qq.com;hjfsuper@126.com
|
基于双目视觉的软体机械臂几何参数测量方法
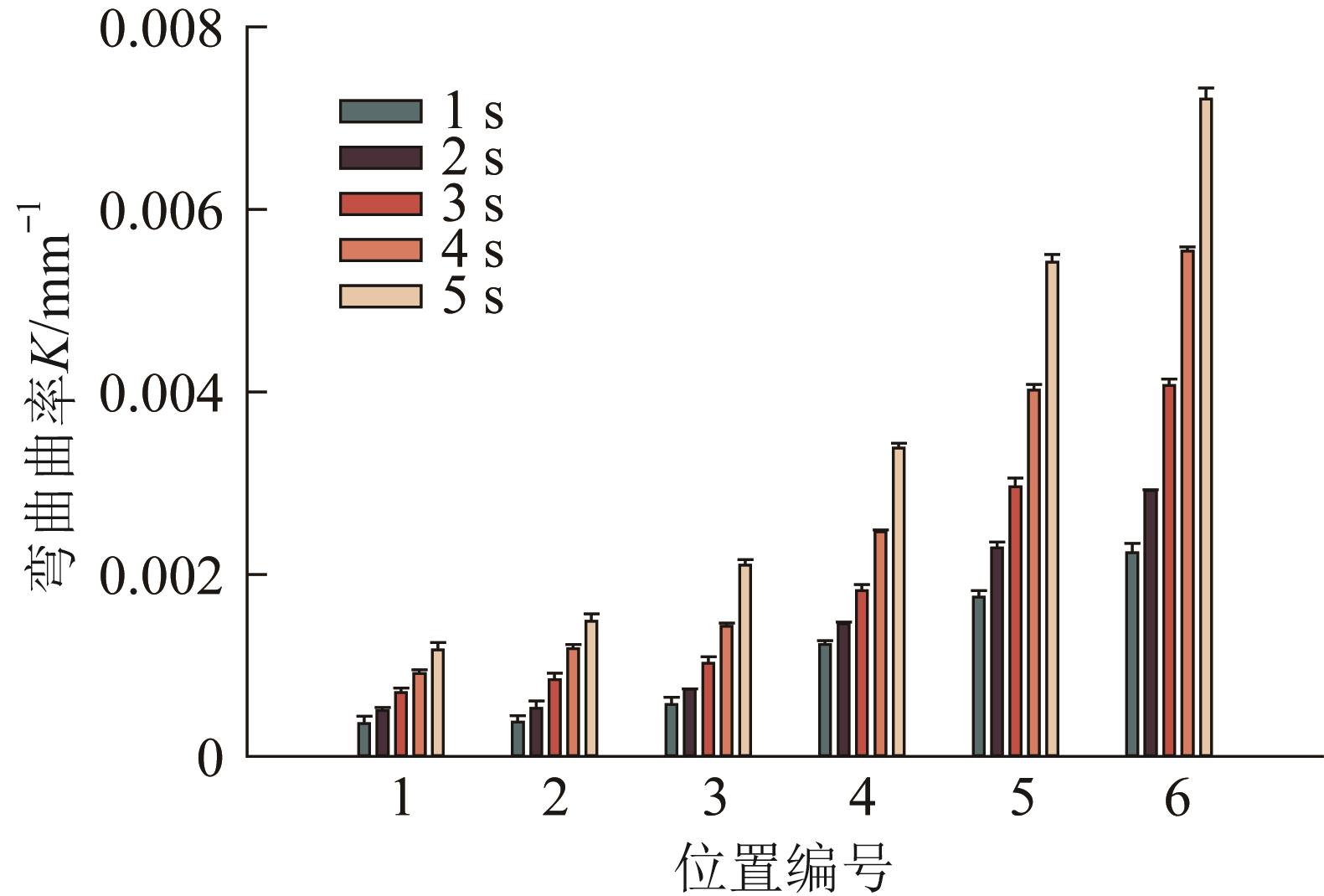
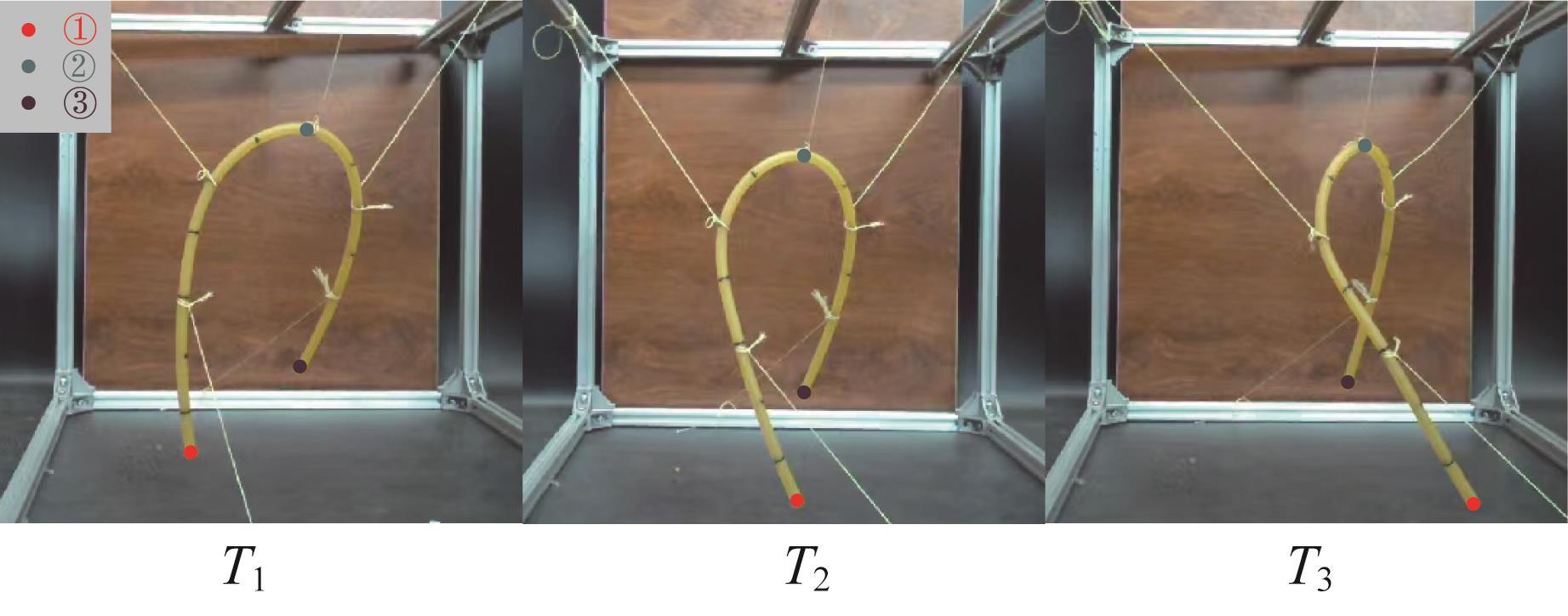
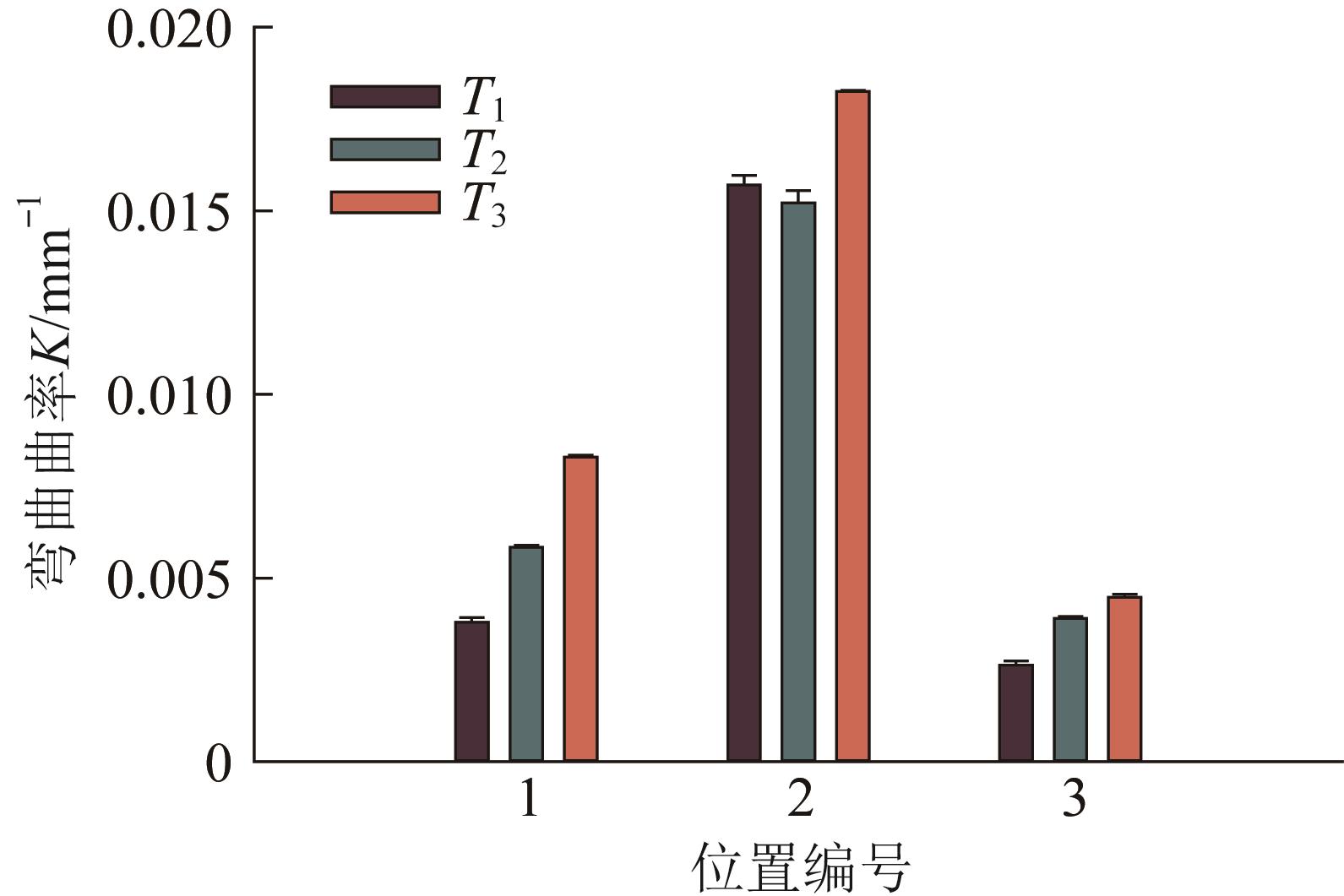
由于软体机械臂固有的柔顺性与低刚度,其在空间运动中展现出复杂的形态变化,现有测量方法难以实现这类机械臂的位姿测量。为解决上述问题,提出了一种结合双目视觉技术和B样条曲线拟合的新方法,旨在准确测量软体机械臂的几何参数。该方法通过双目视觉系统提取软体机械臂中心骨架的三维信息,并采用三次B样条曲线进行三维形状重构,进而获得软体机械臂的关键几何参数。为了验证所提出方法的有效性,对圆弧形、S形弯曲、L形弯曲的软体机械臂进行几何参数测量。测量结果表明,在平面上运动的机械臂的平均弯曲曲率误差为0.198%,平均弯曲角度误差为0.159%;在三维空间中运动的机械臂的平均弯曲角度误差为1.340%。此外,该测量方法能扩展为动态测量方法,在视觉有遮挡的情况下也能准确地测量软体机械臂的几何参数。基于双目视觉和B样条曲线拟合的测量方法可为软体机械臂的参数测量提供一种新思路。
关键词:
软体机械臂,
双目视觉,
B样条曲线,
几何参数测量
|
|
| [[1]] |
GONG Z Y, FANG X, CHEN X Y, et al. A soft manipulator for efficient delicate grasping in shallow water: modeling, control, and real-world experiments[J]. The International Journal of Robotics Research, 2021, 40(1): 449-469.
|
|
|
| [[2]] |
JING Z L, QIAO L F, PAN H, et al. An overview of the configuration and manipulation of soft robotics for on-orbit servicing[J]. Science China Information Sciences, 2017, 60(5): 050201.
|
|
|
| [[3]] |
杨妍, 刘志杰, 韩江涛, 等. 软体机械臂的驱动方式、建模与控制研究进展[J]. 工程科学学报, 2022, 44(12): 2124-2137.
YANG Y, LIU Z J, HAN J T, et al. Overview of actuators, modeling, and control methods for soft manipulators[J]. Chinese Journal of Engineering, 2022, 44(12): 2124-2137.
|
|
|
| [[4]] |
闫继宏, 石培沛, 张新彬, 等. 软体机械臂仿生机理、驱动及建模控制研究发展综述[J]. 机械工程学报, 2018, 54(15): 1-14. doi:10.3901/jme.2018.15.001
YAN J H, SHI P P, ZHANG X B, et al. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators[J]. Journal of Mechanical Engineering, 2018, 54(15): 1-14.
doi: 10.3901/jme.2018.15.001
|
|
|
| [[5]] |
HU J F, ZHANG J. Shape control of a dual-segment soft robot using depth vision[J]. International Journal of Advanced Computer Science and Applications, 2023, 14(6): 37-44.
|
|
|
| [[6]] |
WEBSTER R J, JONES B A. Design and kinematic modeling of constant curvature continuum robots: a review[J]. The International Journal of Robotics Research, 2010, 29(13): 1661-1683.
|
|
|
| [[7]] |
TUTCU C, BAYDERE B A, TALAS S K, et al. Quasi-static modeling of a novel growing soft-continuum robot[J]. The International Journal of Robotics Research, 2021, 40(1): 86-98.
|
|
|
| [[8]] |
ROESTHUIS R J, MISRA S. Steering of multisegment continuum manipulators using rigid-link modeling and FBG-based shape sensing[J]. IEEE Transactions on Robotics, 2016, 32(2): 372-382.
|
|
|
| [[9]] |
SHENG J, DEATON N J, DESAI J P. A large-deflection FBG bending sensor for SMA bending modules for steerable surgical robots[C]//2019 International Conference on Robotics and Automation. Montreal, QC, May 20-24, 2019.
|
|
|
| [[10]] |
LLAMOSI A, TOUSSAINT S. Measuring force intensity and direction with a spatially resolved soft sensor for biomechanics and robotic haptic capability[J]. Soft Robotics, 2019, 6(3): 346-355.
|
|
|
| [[11]] |
SONG S, LI Z, YU H Y, et al. Shape reconstruction for wire-driven flexible robots based on Bézier curve and electromagnetic positioning[J]. Mechatronics, 2015, 29: 28-35.
|
|
|
| [[12]] |
XU F, WANG H S, LIU Z, et al. Visual servoing pushing control of the soft robot with active pushing force regulation[J]. Soft Robotics, 2022, 9(4): 690-704.
|
|
|
| [[13]] |
MARCHESE A D, KOMOROWSKI K, ONAL C D, et al. Design and control of a soft and continuously deformable 2D robotic manipulation system[C]//2014 IEEE International Conference on Robotics and Automation. Hong Kong, China, May 31-Jun. 7, 2014.
|
|
|
| [[14]] |
XU F, WANG H S, CHEN W D, et al. Visual servoing of a cable-driven soft robot manipulator with shape feature[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4281-4288.
|
|
|
| [[15]] |
SINGH I, AMARA Y, MELINGUI A, et al. Modeling of continuum manipulators using Pythagorean Hodograph curves[J]. Soft Robotics, 2018, 5(4): 425-442.
|
|
|
| [[16]] |
HADI SADATI S M, NAGHIBI S E, SHIVA A, et al. TMTDyn: a MATLAB package for modeling and control of hybrid rigid‒continuum robots based on discretized lumped systems and reduced-order models[J]. The International Journal of Robotics Research, 2021, 40(1): 296-347.
|
|
|
| [[17]] |
MBAKOP S, TAGNE G, LAKHAL O, et al. Path planning and control of mobile soft manipulators with obstacle avoidance[C]//2020 3rd IEEE International Conference on Soft Robotics. New Haven, CT, May 15-Jul. 15, 2020.
|
|
|
| [[18]] |
GONTHINA P S, KAPADIA A D, GODAGE I S, et al. Modeling variable curvature parallel continuum robots using Euler curves[C]//2019 International Conference on Robotics and Automation. Montreal, QC, May 20-24, 2019.
|
|
|
| [[19]] |
MA X, CHIU P W, LI Z. Shape sensing of flexible manipulators with visual occlusion based on Bézier curve[J]. IEEE Sensors Journal, 2018, 18(19): 8133-8142.
|
|
|
| [[20]] |
MILOVANOVIĆ G V, UDOVIČIĆ Z. Calculation of coefficients of a cardinal B-spline[J]. Applied Mathematics Letters, 2010, 23(11): 1346-1350.
|
|
|
| [[21]] |
ALBRECHT G, BECCARI C V, ROMANI L. Spatial Pythagorean-Hodograph B-spline curves and 3D point data interpolation[J]. Computer Aided Geometric Design, 2020, 80: 101868.
|
|
|
| [[22]] |
WANG L H, GUO Y L. Speed adaptive robot trajectory generation based on derivative property of B-spline curve[J]. IEEE Robotics and Automation Letters, 2023, 8(4): 1905-1911.
|
|
|
| [[23]] |
KRÄMER N, BOULESTEIX A L, TUTZ G. Penalized partial least squares with applications to B-spline transformations and functional data[J]. Chemometrics and Intelligent Laboratory Systems, 2008, 94(1): 60-69.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|