| Theory and Method of Mechanical Design |
|

|
|
|
| Accurate positioning method for shield segments based on adaptive weighted fusion |
Kaifeng WANG1,2( ),Yuechen WANG1,2,Weiyuan WU2,3,Taoyong WANG1,2,Wangshuo CUI1,2,Chen ZHU4,Bin DENG2,3() ),Yuechen WANG1,2,Weiyuan WU2,3,Taoyong WANG1,2,Wangshuo CUI1,2,Chen ZHU4,Bin DENG2,3() |
1.School of Mechanical Engineering, Tianjin University, Tianjin 300072, China
2.International Institute for Innovative Design and Intelligent Manufacturing in Zhejiang, Tianjin University, Shaoxing 312000, China
3.School of Electrical and Information Engineering, Tianjin University, Tianjin 300072, China
4.China Railway Construction Heavy Industry Corporation Limited, Changsha 410100, China |
|
|
|
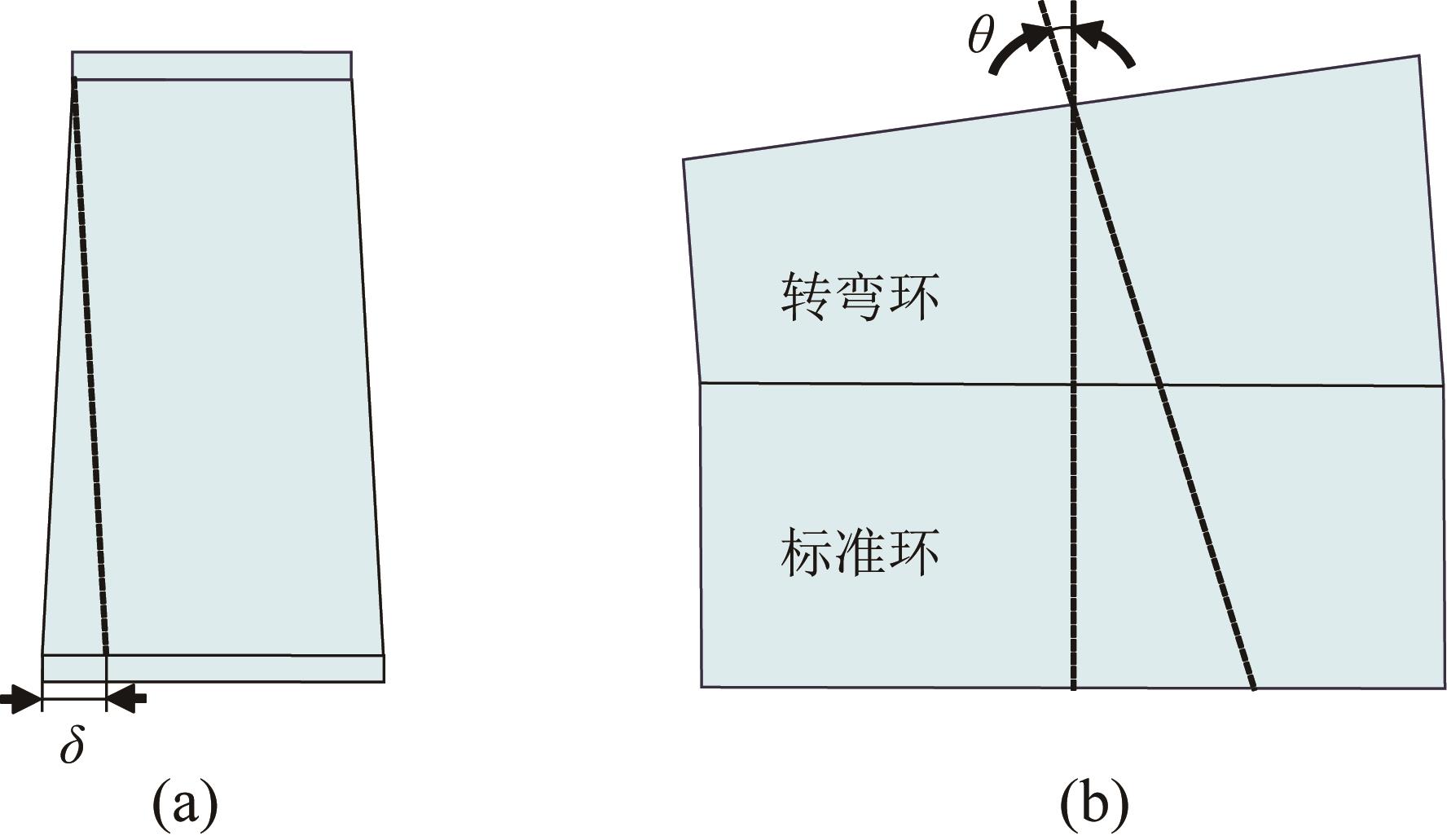
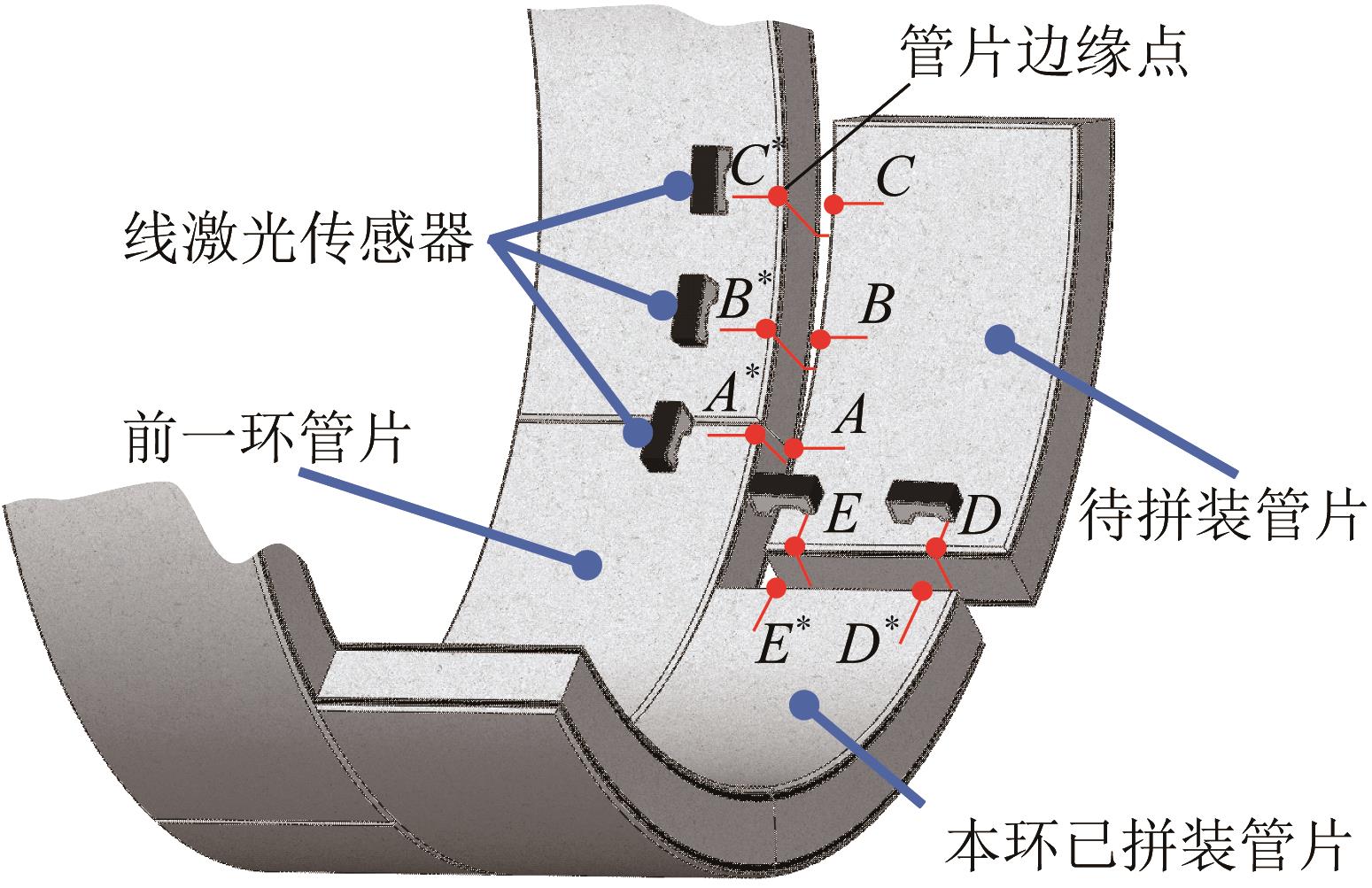
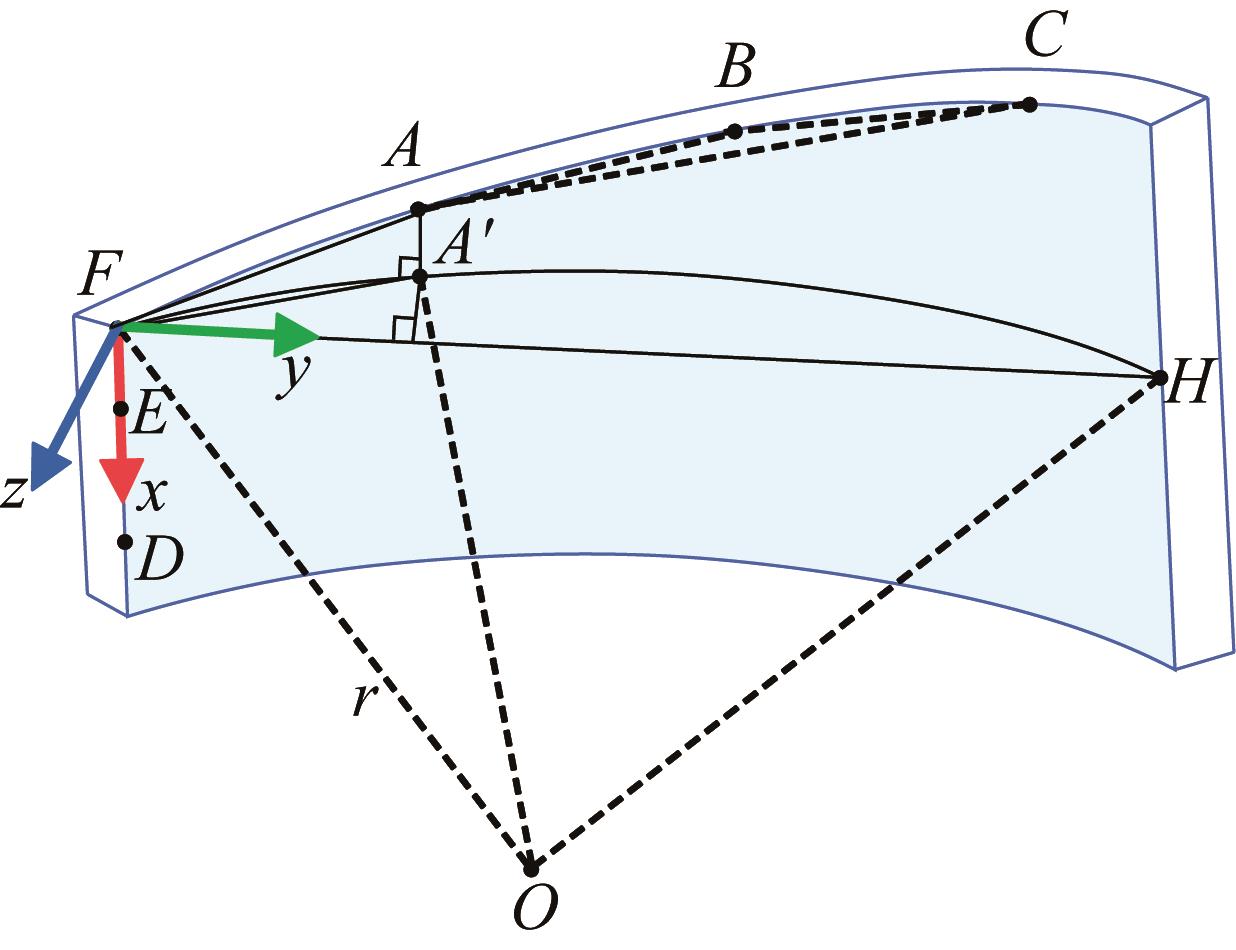
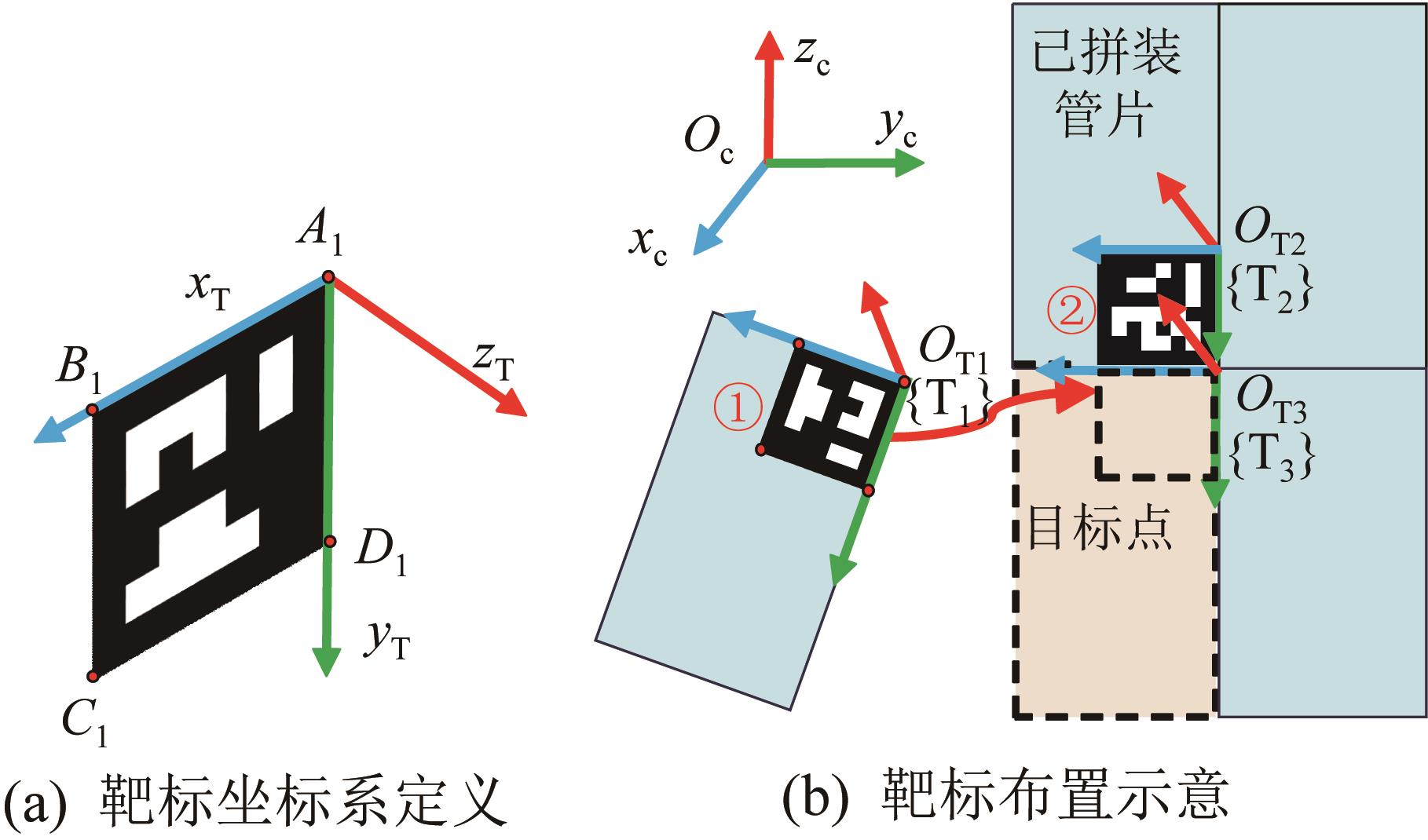
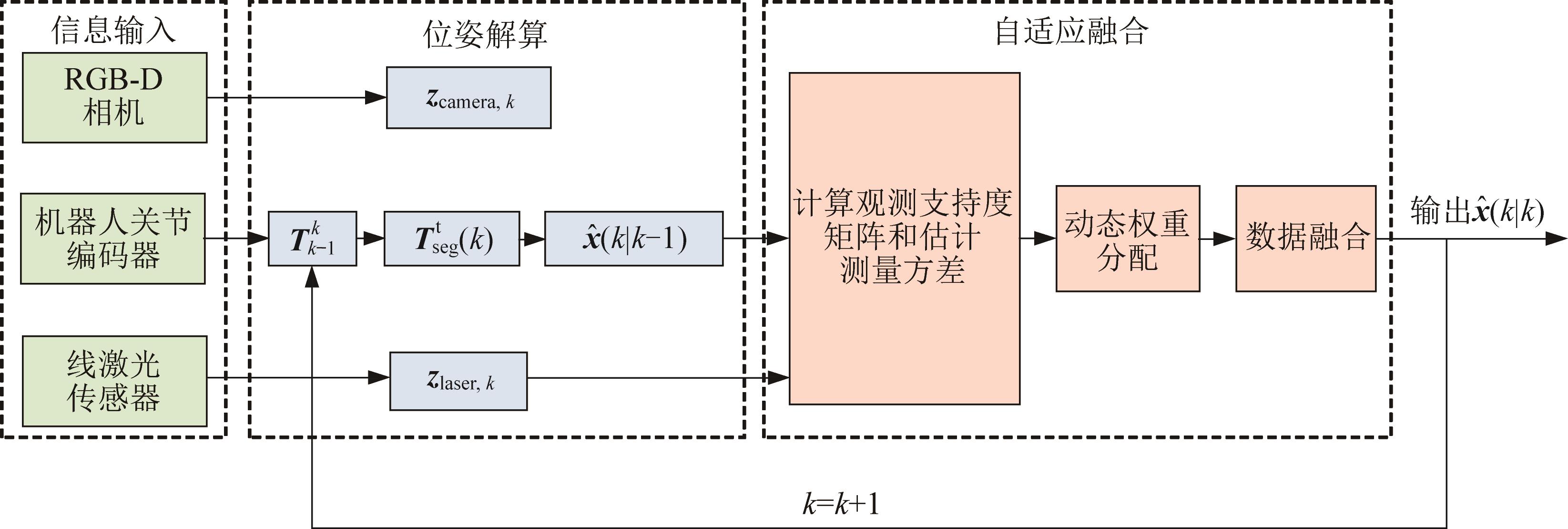
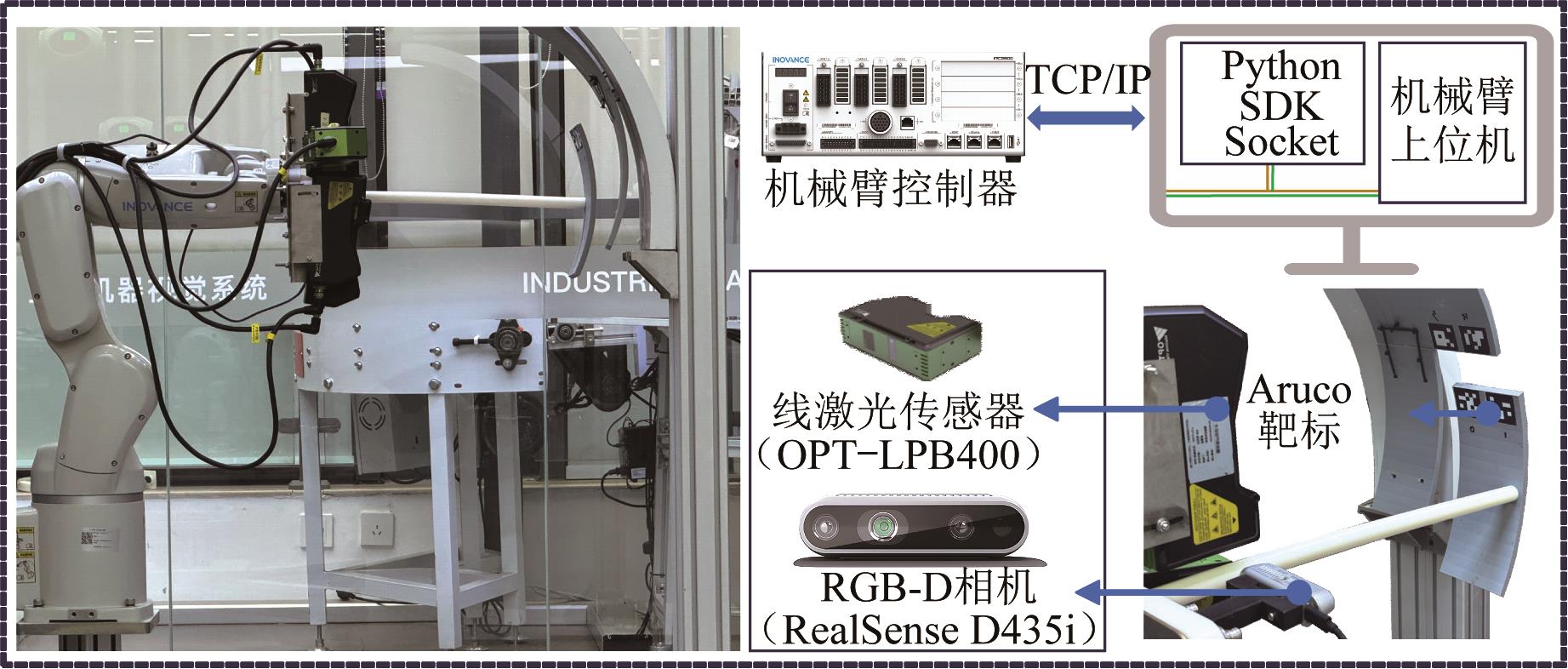
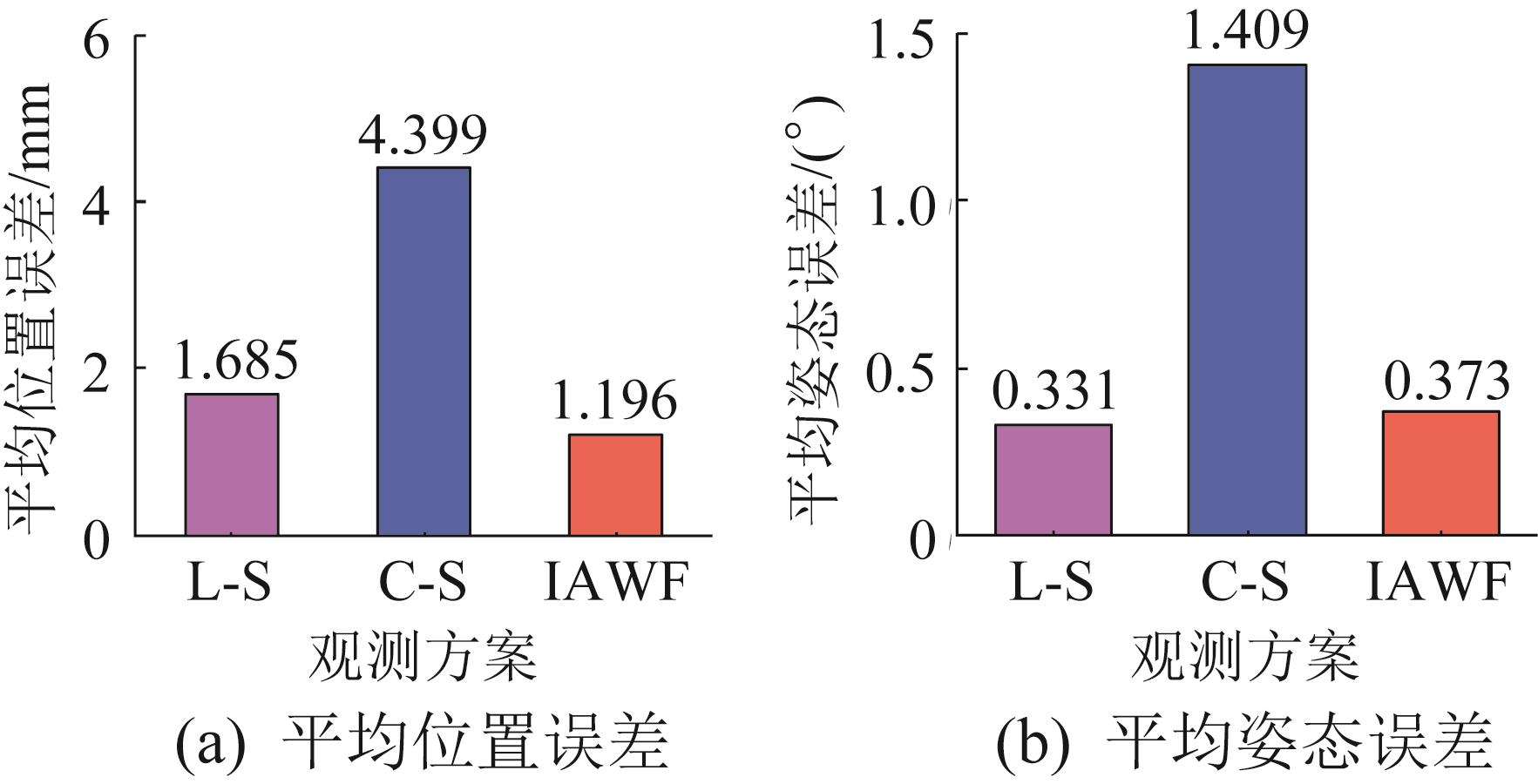
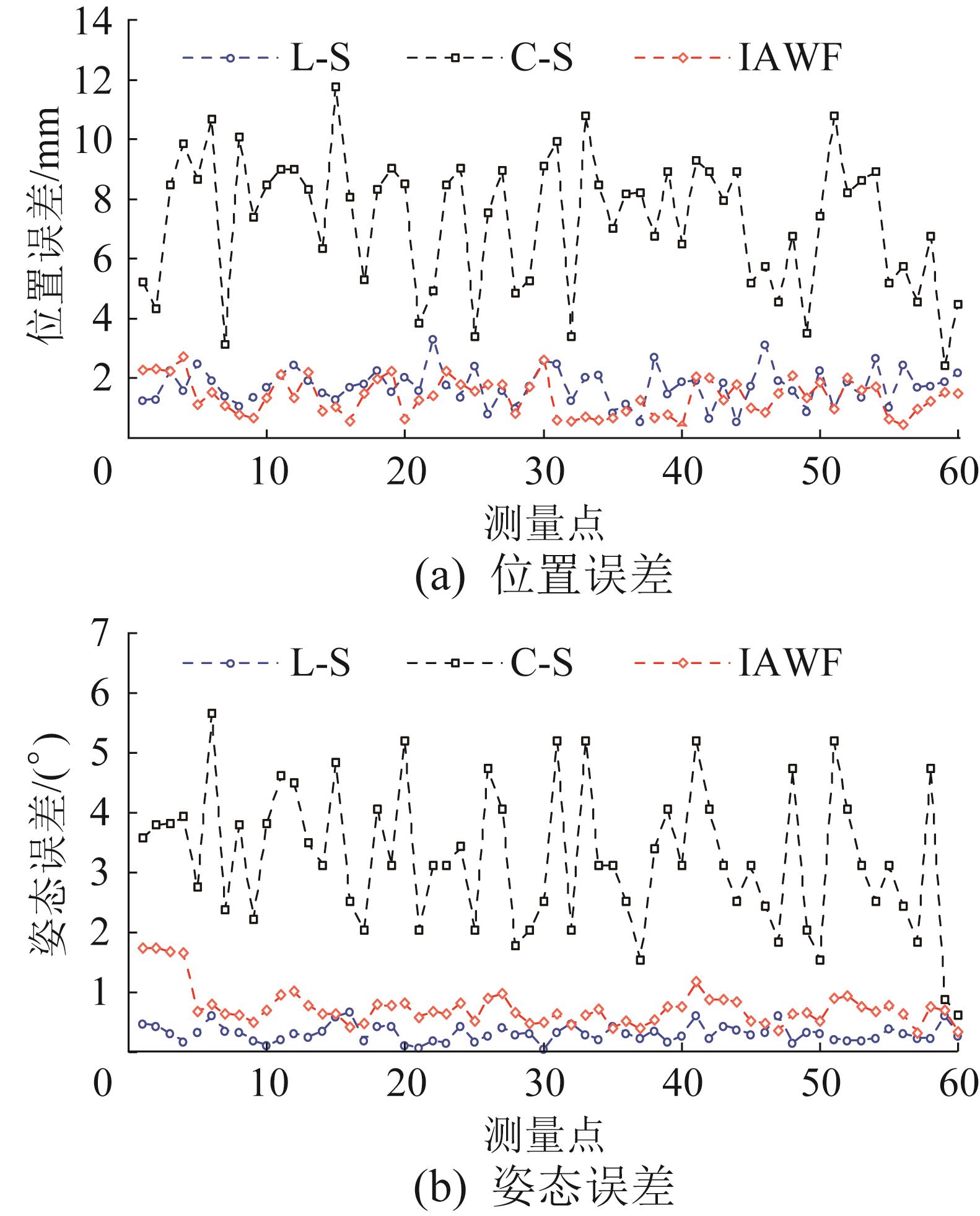
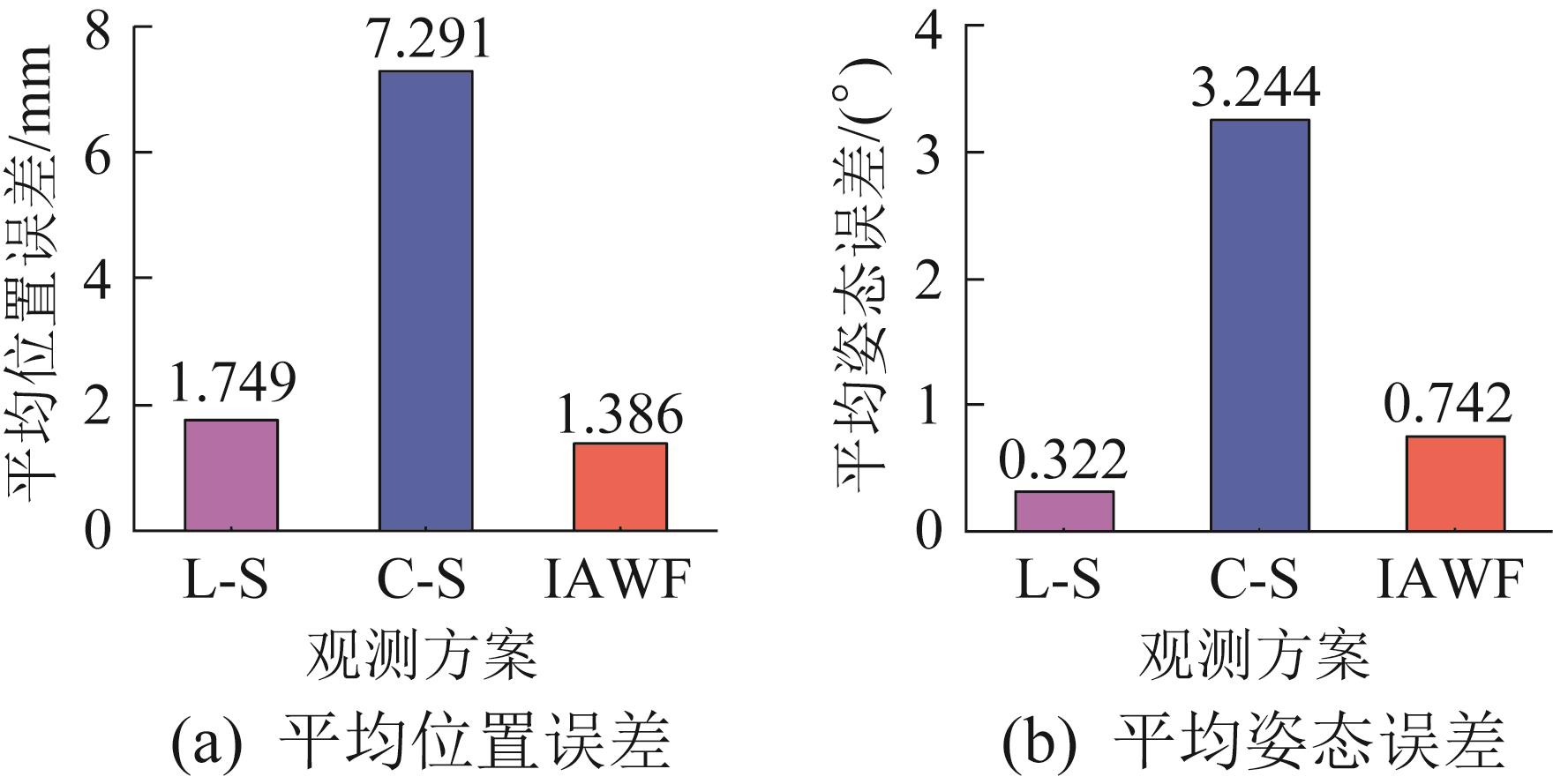
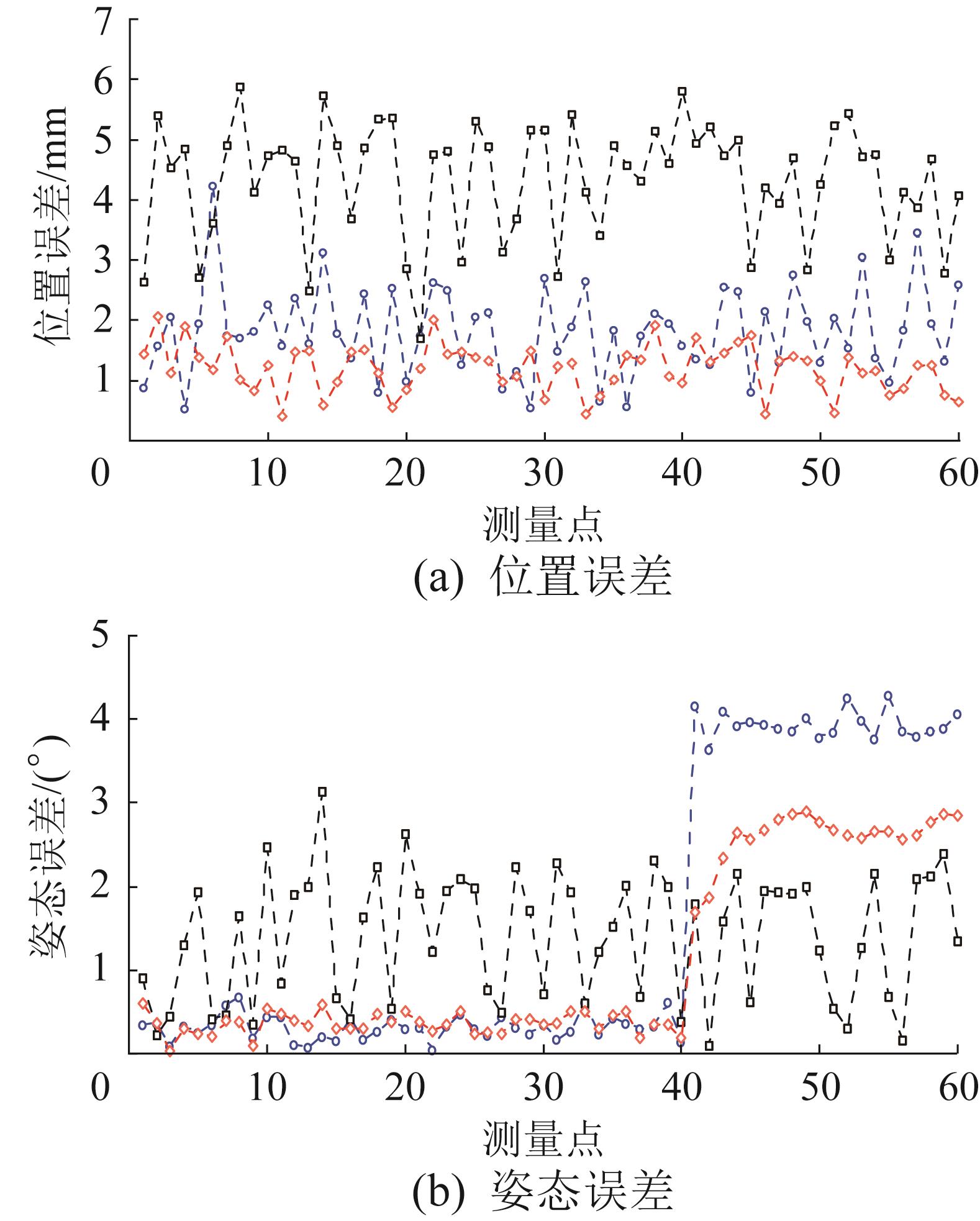
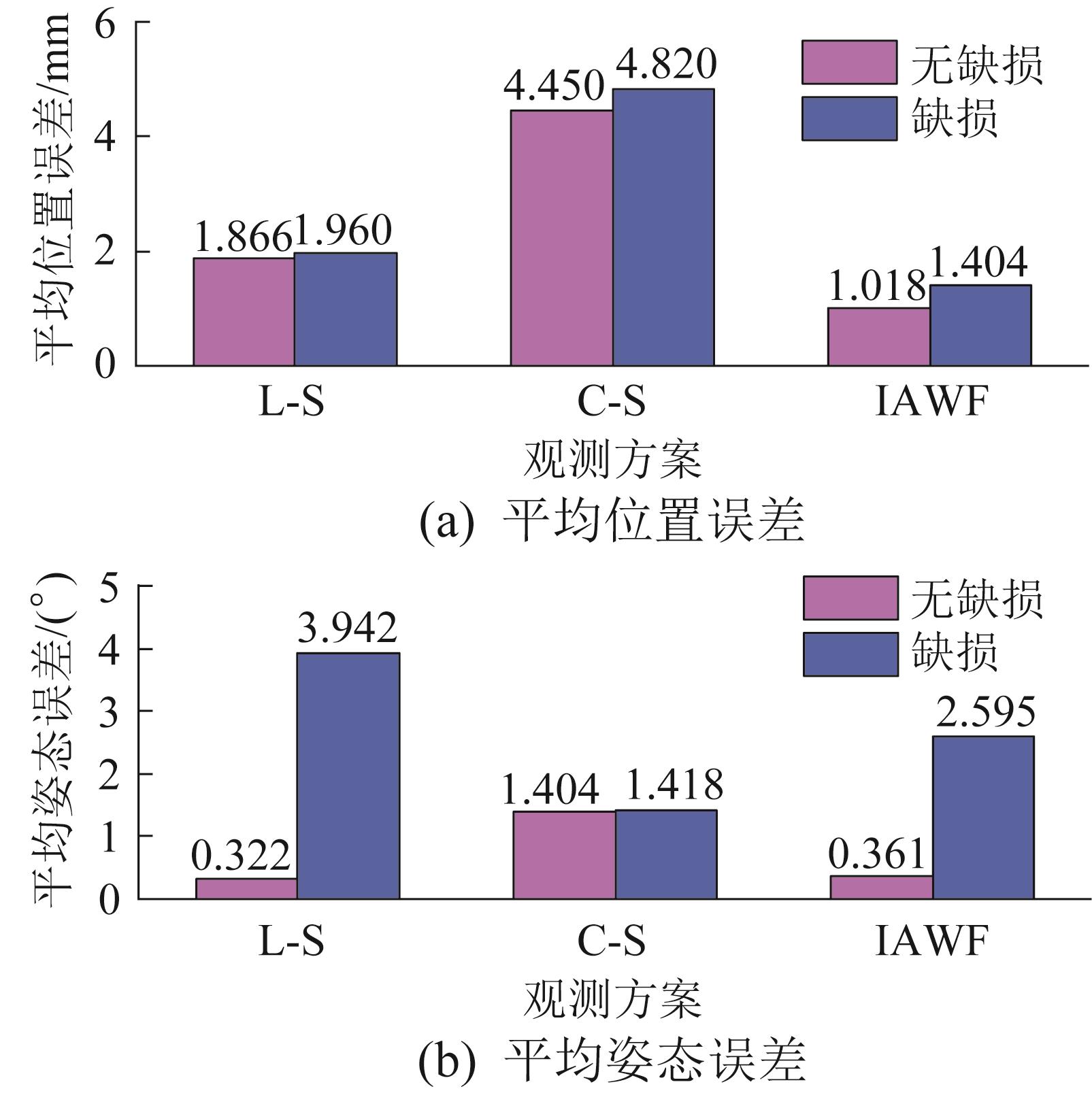
Abstract To enhance the accuracy and environmental adaptability of pose detection systems during the automatic assembly process of shield segments, a highly robust multi-source positioning method integrating line laser sensors and an RGB-D camera is proposed. At the perception level, five line laser sensors were employed to extract edge features of the segments, and the coordinates of the intersection points between arc edges and straight edges were derived in combination with the geometric model to estimate the segment pose. Meanwhile, a target system was designed, and the RGB-D camera was used to capture images and depth information of the segments. Through coordinate transformation, the spatial posture of the target relative to the assembly robot's end was obtained. In view of the limitation that a single type of sensor was vulnerable to environmental disturbances, an improved adaptive weighted fusion (IAWF) algorithm was proposed, which dynamically adjusted weights based on observation support and measurement variance, thereby achieving high-precision and high-robustness fusion positioning. Finally, the simulation was conducted to verify the stability and superiority of the IAWF algorithm under abnormal sensor conditions. Meanwhile, a fusion positioning experimental platform was established to evaluate the positioning performance of the IAWF algorithm under various working conditions, including normal, low-light, and abnormal line laser measurement scenarios. The results showed that the proposed fusion positioning method significantly improved the anti-interference ability of the segment pose detection system in complex environments while maintaining high measurement accuracy. The average position error was reduced by 28.4%, and the average posture error was reduced by 34.2%, which was superior to the measurement effect of a single type of sensor. The maximum misalignment and maximum gap during segment assembly were 4.8 mm and 4.6 mm, respectively, which met the actual engineering requirements. The research results provide theoretical foundations and technical support for the design of intelligent perception systems for the automatic assembly of shield segments.
|
|
Received: 21 April 2025
Published: 31 October 2025
|
|
|
|
Corresponding Authors:
Bin DENG
E-mail: wangkf@tju.edu.cn;dengbin@tju.edu.cn
|
基于自适应加权融合的盾构管片精确定位方法
为提升盾构管片自动拼装过程中位姿检测系统的精度和环境适应能力,提出了一种融合线激光传感器与RGB-D相机的高鲁棒性多源定位方法。在感知层面,利用5个线激光传感器提取管片的边缘特征,并结合几何模型推算其弧边与直边交点的坐标,以实现对管片位姿的估计;同时,设计靶标系统,借助RGB-D相机获取管片图像与深度信息,并通过坐标变换来解算靶标相对于拼装机器人末端的空间姿态。针对单一传感器易受环境干扰的局限性,提出了改进的自适应加权融合(improved adaptive weighted fusion, IAWF)算法,基于观测支持度和测量方差动态调整权重,以实现高精度与高鲁棒性的融合定位。最后,通过仿真来验证IAWF算法在传感器异常条件下的稳定性与优越性;同时,构建融合定位实验平台,评估IAWF算法在正常、低光照及线激光测量数据异常等多种工况下的定位性能。结果表明,所提出的融合定位方法在保持高测量精度的同时显著提升了管片位姿检测系统在复杂环境下的抗干扰能力,平均位置误差降低了28.4%,平均姿态误差降低了34.2%,优于单一传感器的测量效果;管片拼装的最大错台和最大间隙分别为4.8 mm和4.6 mm,满足实际工程要求。研究结果为盾构管片自动化拼装的智能感知系统设计提供了理论依据与技术支撑。
关键词:
盾构管片,
位姿检测,
融合定位,
线激光传感器,
RGB-D相机
|
|
| [[1]] |
易国良. 盾构法隧道施工技术发展和管理重点探讨[J]. 隧道建设(中英文), 2024, 44(5): 927-942.
YI G L. Discussion on technological development and key management points of shield tunneling[J]. Tunnel Construction, 2024, 44(5): 927-942.
|
|
|
| [[2]] |
CHEN X Y, WANG L T, CAI J, et al. Autonomous recognition and positioning of shield segments based on red, green, blue and depth information[J]. Automation in Construction, 2023, 146: 104687.
|
|
|
| [[3]] |
YUAN Y C, ZHANG Y. Building of fine-tuning mechanism posture and kinematics model for shield segment erector[J]. Advanced Materials Research, 2013, 634-638: 3737-3740.
|
|
|
| [[4]] |
王林涛, 毛齐. 基于RGB与深度信息融合的管片抓取位置测量方法[J]. 浙江大学学报(工学版), 2023, 57(1): 47-54.
WANG L T, MAO Q. Position measurement method for tunnel segment grabbing based on RGB and depth information fusion[J]. Journal of Zhejiang University (Engineering Science), 2023, 57(1): 47-54.
|
|
|
| [[5]] |
TANAKA Y. Automatic segment assembly robot for shield tunneling machine[J]. Computer-Aided Civil and Infrastructure Engineering, 1995, 10(5): 325-337.
|
|
|
| [[6]] |
MAIDL B, HERRENKNECHT M, MAIDL U, et al. Mechanised shield tunnelling[M]. 2nd ed. Berlin: Ernst & Sohn, 2012.
|
|
|
| [[7]] |
EDWARDS J T. Civil engineering for underground rail transport[M]. Amsterdam: Elsevier, 1990.
|
|
|
| [[8]] |
高翔, 陶建峰, 王明斗, 等. 基于线激光传感器的盾构管片位姿检测方法[J]. 中南大学学报(自然科学版), 2020, 51(1): 41-48.
GAO X, TAO J F, WANG M D, et al. Position and posture detection method of shield segments using line laser sensors[J]. Journal of Central South University (Science and Technology), 2020, 51(1): 41-48.
|
|
|
| [[9]] |
王红梅, 李国栋, 张华, 等. 基于轮廓测量仪的K形盾构管片位姿测量方法[J]. 现代制造技术与装备, 2022, 58(8): 43-46, 57.
WANG H M, LI G D, ZHANG H, et al. Position and posture measurement method of K-type shield degment using profilometer[J]. Modern Manufacturing Technology and Equipment, 2022, 58(8): 43-46, 57.
|
|
|
| [[10]] |
吴志洋, 王双, 刘铁根, 等. 基于深度学习视觉和激光辅助的盾构管片自动拼装定位方法[J]. 红外与激光工程, 2022, 51(4): 252-260.
WU Z Y, WANG S, LIU T G, et al. Automatic assembly positioning method of shield tunnel segments based on deep learning vision and laser assistance[J]. Infrared and Laser Engineering, 2022, 51(4): 252-260.
|
|
|
| [[11]] |
YU L W, ZHANG D, ZHANG Y S. Three-dimensional measurement system based on line laser[J]. Applied Mechanics and Materials, 2013, 333-335: 32-36.
|
|
|
| [[12]] |
朱世友. 国内地铁盾构区间隧道管片结构设计的现状与发展[J]. 现代隧道技术, 2002, 39(6): 23-28.
ZHU S Y. Present status and development of segment design for the shield driven running tunnel of metro[J]. Modern Tunnelling Technology, 2002, 39(6): 23-28.
|
|
|
| [[13]] |
孙勇, 景博. 基于支持度的多传感器一致可靠性融合[J]. 传感技术学报, 2005, 18(3): 537-539.
SUN Y, JING B. Consistent and reliable fusion of multi-sensor based on support degree[J]. Chinese Journal of Sensors and Actuators, 2005, 18(3): 537-539.
|
|
|
| [[14]] |
杨佳, 宫峰勋. 改进的动态加权多传感器数据融合算法[J]. 计算机工程, 2011, 37(11): 97-99.
YANG J, GONG F X. Improved dynamic weighted multi-sensors data fusion algorithm[J]. Computer Engineering, 2011, 37(11): 97-99.
|
|
|
| [[15]] |
涂国平. 多传感器数据融合的稳健处理方法[J]. 数据采集与处理, 1998, 13(1): 85-87.
TU G P. A robust method for the data fusion[J]. Journal of Data Acquisition and Processing, 1998, 13(1): 85-87.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|