| Design for Quality |
|


|
|
|
| Research on extrusion force of micro-flow extrusion 3D printer controlled by variable universe fuzzy PID |
Jing ZHOU1( ),Hong-fei GAO1,Lin LU2,Guo-lin DUAN3 ),Hong-fei GAO1,Lin LU2,Guo-lin DUAN3 |
1.School of Mechanical Engineering, Tianjin University of Science and Technology, Tianjin 300222, China
2.Tianjin Tianchuan Electric Control Equipment Test Co. , Ltd. , Tianjin 300180, China
3.School of Mechanical Engineering, Hebei University of Technology, Tianjin 300401, China |
|
|
|
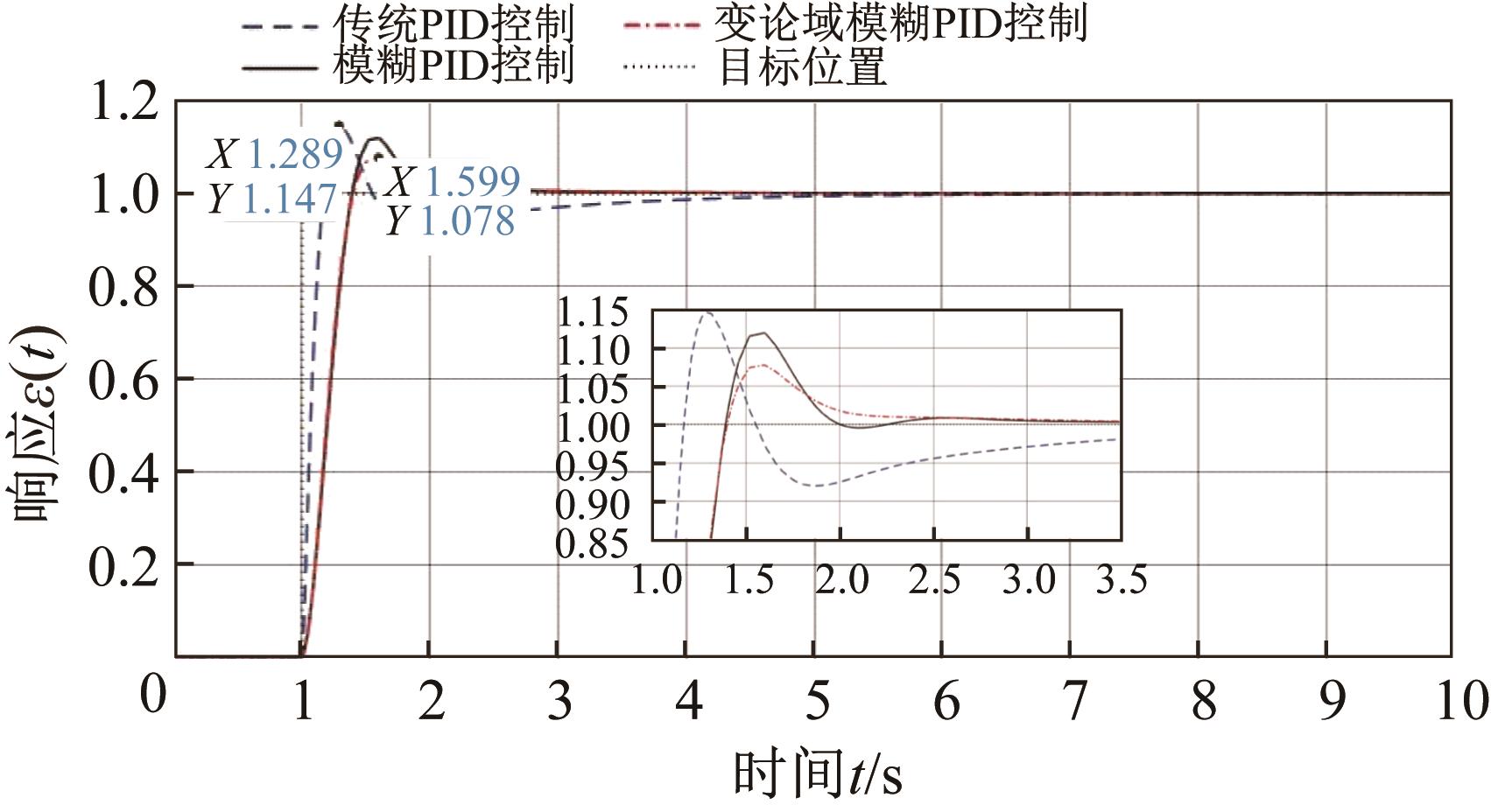
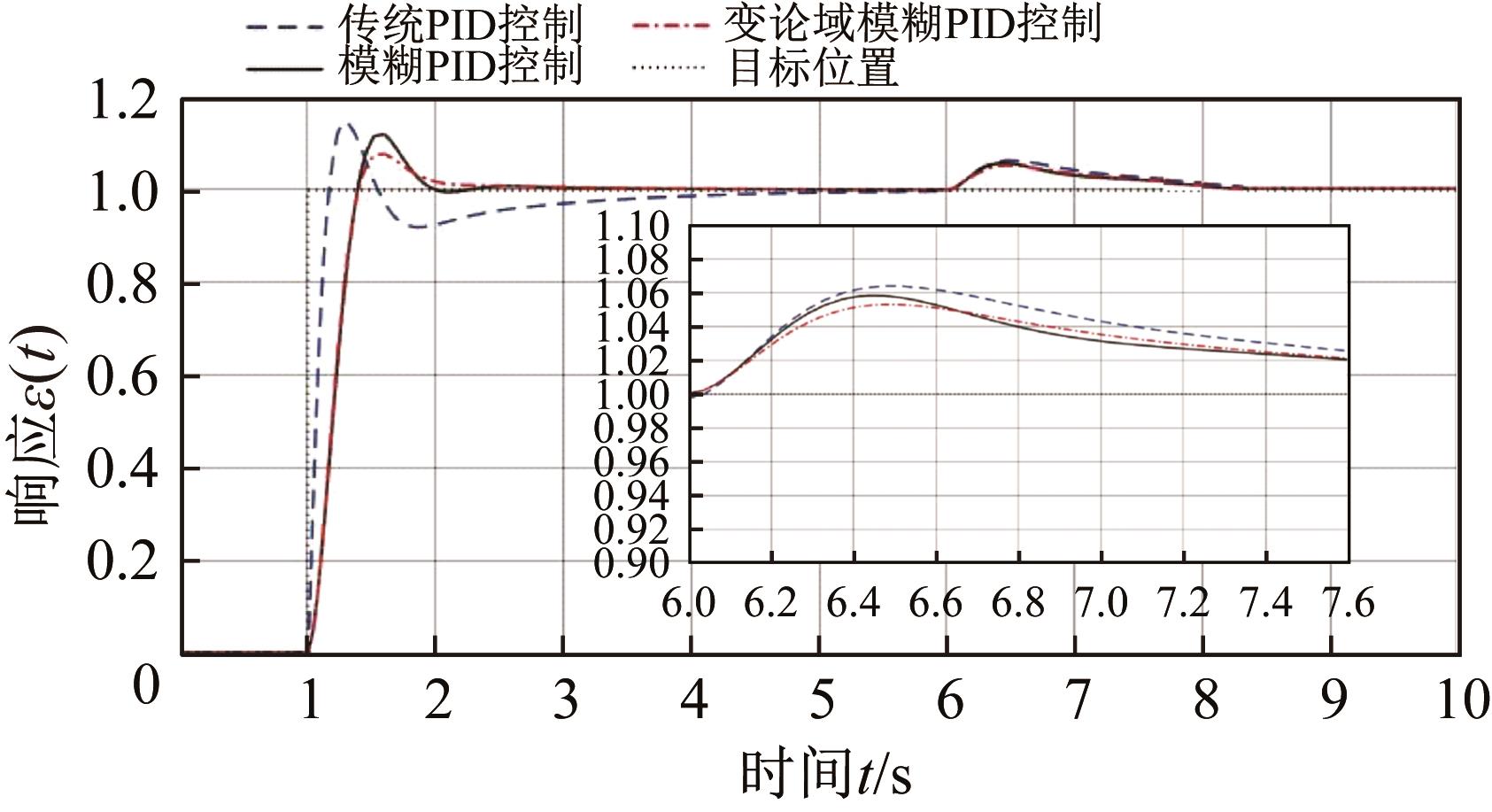
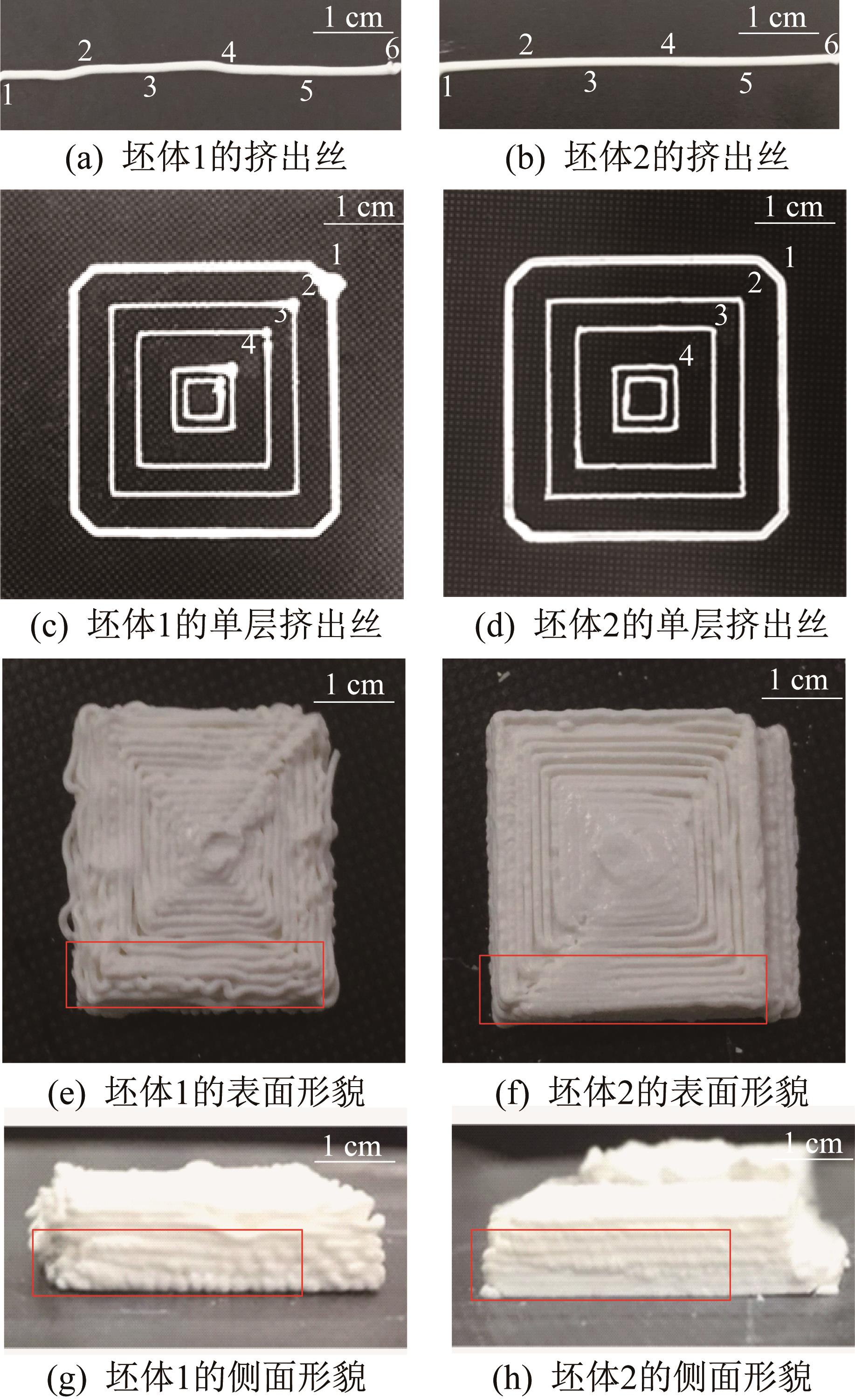
Abstract In order to improve the printing accuracy of micro-flow extrusion 3D printer, aiming at the typical characteristics of its extrusion force control, such as time-varying and nonlinear, the extrusion process of printing materials was analyzed based on the extrusion force model, and a variable universe fuzzy PID (proportion integration differentiation) control strategy was proposed to realize rapid adjustment when the extrusion force changed irregularly in the extrusion process. At the same time, the MATLAB software was used to establish the simulation model of extrusion force control system to carry out the simulation analysis of different control strategies, and the self-built experimental platform was used to print the real object to verify the feasibility of the proposed control strategy. The simulation and experimental results showed that the variable universe fuzzy PID control strategy had a significant effect on improving the surface quality of formed body and the forming accuracy. The proposed variable universe fuzzy PID control strategy can provide some reference for the stable control of extrusion force of extrusion 3D printer, and also can provide some reference for similar time-varying and nonlinear control systems.
|
|
Received: 10 March 2022
Published: 02 November 2022
|
|
|
变论域模糊PID控制微流挤出型3D打印机的挤压力研究
为了提高微流挤出型3D打印机的打印精度,针对其挤压力控制在挤出成型过程中存在时变性和非线性等典型特性,基于挤压力模型分析打印材料的挤出成型过程,并提出了一种变论域模糊PID(proportion integration differentiation,比例积分微分)控制策略,以实现挤出成型过程中挤压力不规律变化时的快速调节功能。同时,利用MATLAB软件建立挤压力控制系统仿真模型以开展不同控制策略的仿真分析,并利用自主搭建的实验平台进行实物打印,以验证所提出控制策略的可行性。仿真和实验结果表明,变论域模糊PID控制策略对改善成型坯体表面质量和提高成型精度有显著效果。所提出的变论域模糊PID控制策略可为挤出型3D打印机挤压力的稳定控制提供一定参考,也可为类似时变和非线性控制系统提供一定的借鉴。
关键词:
3D打印,
变论域模糊PID(比例积分微分),
挤出成型,
挤压力控制
|
|
| [1] |
周婧,段国林,卢林,等.基于微流挤压成型工艺的陶瓷制品挤出过程仿真和优化(英文)[J].电子器件,2015,38(3):473-479.
ZHOU Jing, DUAN Guo-lin, LU Lin, et al. Simulation and optimization of ceramic product forming process based on micro-flow extrusion[J]. Chinese Journal of Electron Devices, 2015, 38(3): 473-479.
|
|
|
| [2] |
林辉辉.手持自动注射器步进电机控制系统研究[D].杭州:浙江大学,2018:1-84.
LIN Hui-hui. Research on the control system of the stepper motor in automatic handheld syringe[D]. Hangzhou: Zhejiang University, 2018: 1-84.
|
|
|
| [3] |
PERCOCO G, ARLEO L, STANO G, et al. Analytical model to predict the extrusion force as a function of the layer height, in extrusion-based 3D printing[J]. Additive Manufacturing, 2020, 38(3): 101791.
|
|
|
| [4] |
NAIR S, PANDA S, TRIPATHI A, et al. Relating print velocity and extrusion characteristics of 3D-printable cementitious binders: implications towards testing methods[J]. Additive Manufacturing, 2021, 46: 102127.
|
|
|
| [5] |
闫存富,李淑娟,杨磊鹏.陶瓷材料零件低温挤压成型工艺挤出过程研究[J].硅酸盐通报,2015,34(11):3073-3077.
YAN Cun-fu, LI Shu-juan, YANG Lei-peng. Extrusion process of freeze-form extrusion fabrication for ceramics material[J]. Bulletin of the Chinese Ceramic Society, 2015, 34(11): 3073-3077.
|
|
|
| [6] |
温盛军,毕淑慧,邓明聪.一类新非线性控制方法:基于演算子理论的控制方法综述[J].自动化学报,2013,39(11):1812-1819. doi:10.3724/sp.j.1004.2013.01812
WEN Sheng-jun, BI Shu-hui, DENG Ming-cong. Survey of a new nonlinear control technique: an operator-based approach[J]. Acta Automatica Sinica, 2013, 39(11): 1812-1819.
doi: 10.3724/sp.j.1004.2013.01812
|
|
|
| [7] |
周丹, El-Mounayri HAZIM A,曾富洪,等.大弹性负载伺服系统变论域双模糊控制[J].机械工程学报,2014,50(13):165-169. doi:10.3901/jme.2014.13.165
ZHOU Dan, El-Mounayri HAZIM A, ZENG Fu-hong, et al. Variable universe double fuzzy control for huge elastic loaded servo system[J]. Journal of Mechanical Engineering, 2014, 50(13): 165-169.
doi: 10.3901/jme.2014.13.165
|
|
|
| [8] |
ZHANG L, WU T, HUANG F. A coupling motional control method based on parametric predictive and variable universe fuzzy control for multi-axis CNC machine tools[J]. The International Journal of Advanced Manufacturing Technology, 2014, 74(5): 1097-1114.
|
|
|
| [9] |
SHI Jing-bo. Variable universe fuzzy PID control for minimally invasive operation robotic catheter system[J]. Applied Mechanics and Materials, 2014, 618: 470-474.
|
|
|
| [10] |
王大勇,王慧.基于变论域模糊控制的车辆半主动悬架控制方法[J].中国机械工程,2017,28(3):366-372. doi:10.3969/j.issn.1004-132X.2017.03.019
WANG Da-yong, WANG Hui. Control method of vehicle semi-active suspensions based on variable universe fuzzy control[J]. China Mechanical Engineering, 2017, 28(3): 366-372.
doi: 10.3969/j.issn.1004-132X.2017.03.019
|
|
|
| [11] |
于今,陈华,刘骏豪.液压机械无级变速器的变论域模糊PID 速比跟踪控制[J].中国机械工程,2019,30(10):1226-1232. doi:10.3969/j.issn.1004-132X.2019.10.013
YU Jin, CHEN Hua, LIU Jun-hao. Speed ratio follow-up control of HMCVT based on variable universe fuzzy PID[J]. China Mechanical Engineering, 2019, 30(10): 1226-1232.
doi: 10.3969/j.issn.1004-132X.2019.10.013
|
|
|
| [12] |
夏光,杜克,谢海,等.基于侧倾分级的叉车横向稳定性变论域模糊控制[J].机械工程学报,2019,55(12):157-167. doi:10.3901/jme.2019.12.157
XIA Guang, DU Ke, XIE Hai, et al. Variable universe fuzzy control for the lateral stability of forklift based on the roll classification[J]. Journal of Mechanical Engineering, 2019, 55(12): 157-167.
doi: 10.3901/jme.2019.12.157
|
|
|
| [13] |
BENBOW J, BRIDGWATER J. Paste flow, and extrusion[M]. Oxford: Clarendon Press, 1993: 29-32.
|
|
|
| [14] |
伍艳雄.步进电机细分驱动控制研究[D].恩施:湖北民族大学,2019:1-80.
WU Yan-xiong. Research of stepping motor subdivision drive control[D]. Enshi: Hubei Minzu University, 2019: 1-80.
|
|
|
| [15] |
孙磊.基于FPGA的步进电机矢量控制研究[D].南京:南京航空航天大学,2018:1-73.
SUN Lei. Research of stepping motor vector control based on FPGA[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2018: 1-73.
|
|
|
| [16] |
李洪兴.变论域自适应模糊控制器[J].中国科学:技术科学,1999(1):32-42. doi:10.3969/j.issn.1674-7259.1999.01.006
LI Hong-xing. Variable universe adaptive fuzzy controller[J]. Scientia Sinica(Technologica), 1999(1): 32-42.
doi: 10.3969/j.issn.1674-7259.1999.01.006
|
|
|
| [17] |
吴超.3D生物打印机控制系统的研究与设计[D].太原:太原理工大学,2020:1-79.
WU Chao. Research and design of 3D bio-printer control system[D]. Taiyuan: Taiyuan University of Technology, 2020: 1-79.
|
|
|
| [18] |
蒋伟,刘纲,王涛,等.基于自适应伸缩因子的变论域模糊PID振动控制方法[J].工程力学,2021,38(11):23-32. doi:10.6052/j.issn.1000-4750.2020.11.0786
JIANG Wei, LIU Gang, WANG Tao, et al. Variable universe fuzzy PID control based on adaptive contracting-expanding factors[J]. Engineering Mechanics, 2021, 38(11): 23-32.
doi: 10.6052/j.issn.1000-4750.2020.11.0786
|
|
|
| [19] |
冀常鹏,孙巍.变论域自适应模糊PID控制系统仿真与应用[J].测控技术,2018,37(10):119-123.
JI Chang-peng, SUN Wei. Simulation and application of variable universe adaptive fuzzy-PID control system[J]. Measurement & Control Technology, 2018, 37(10): 119-123.
|
|
|
| [20] |
ZENG Wen-jie, JIANG Qing-feng, XIE Jin-sen, et al. A functional variable universe fuzzy PID controller for load following operation of PWR with the multiple model[J]. Annals of Nuclear Energy, 2020, 140: 23-29.
|
|
|
| [21] |
SOMEFUN O A, AKINGBADE K, DAHUNSI F. The dilemma of PID tuning[J]. Annual Reviews in Control, 2021, 52: 65-74.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|