| Theory and Method of Mechanical Design |
|

|
|
|
| Study on the method of skin bio-3D printing based on Stewart parallel robot |
Xiaojie WEI1,2,3( ),Wenfeng LIANG1,Huixuan ZHU2,3,6,Kai GUO2,3,Feiyang GAO2,3,Zhenyu YIN4,5,6,Song LI2,3,4,5,6() ),Wenfeng LIANG1,Huixuan ZHU2,3,6,Kai GUO2,3,Feiyang GAO2,3,Zhenyu YIN4,5,6,Song LI2,3,4,5,6() |
1.School of Mechanical Engineering, Shenyang Jianzhu University, Shenyang 110186, China
2.Key Laboratory of Robotics and Intelligent Systems, Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
3.Innovative Research Institute of Robotics and Intelligent Manufacturing, Chinese Academy of Sciences, Shenyang 110169, China
4.Shenyang Institute of Computing Technology, Chinese Academy of Sciences, Shenyang 110168, China
5.Liaoning Key Laboratory of Technical Research on Domestic Basic Software and Hardware Industrial Control Platforms, Shenyang 110168, China
6.University of the Chinese Academy of Sciences, Beijing 100049, China |
|
|
|
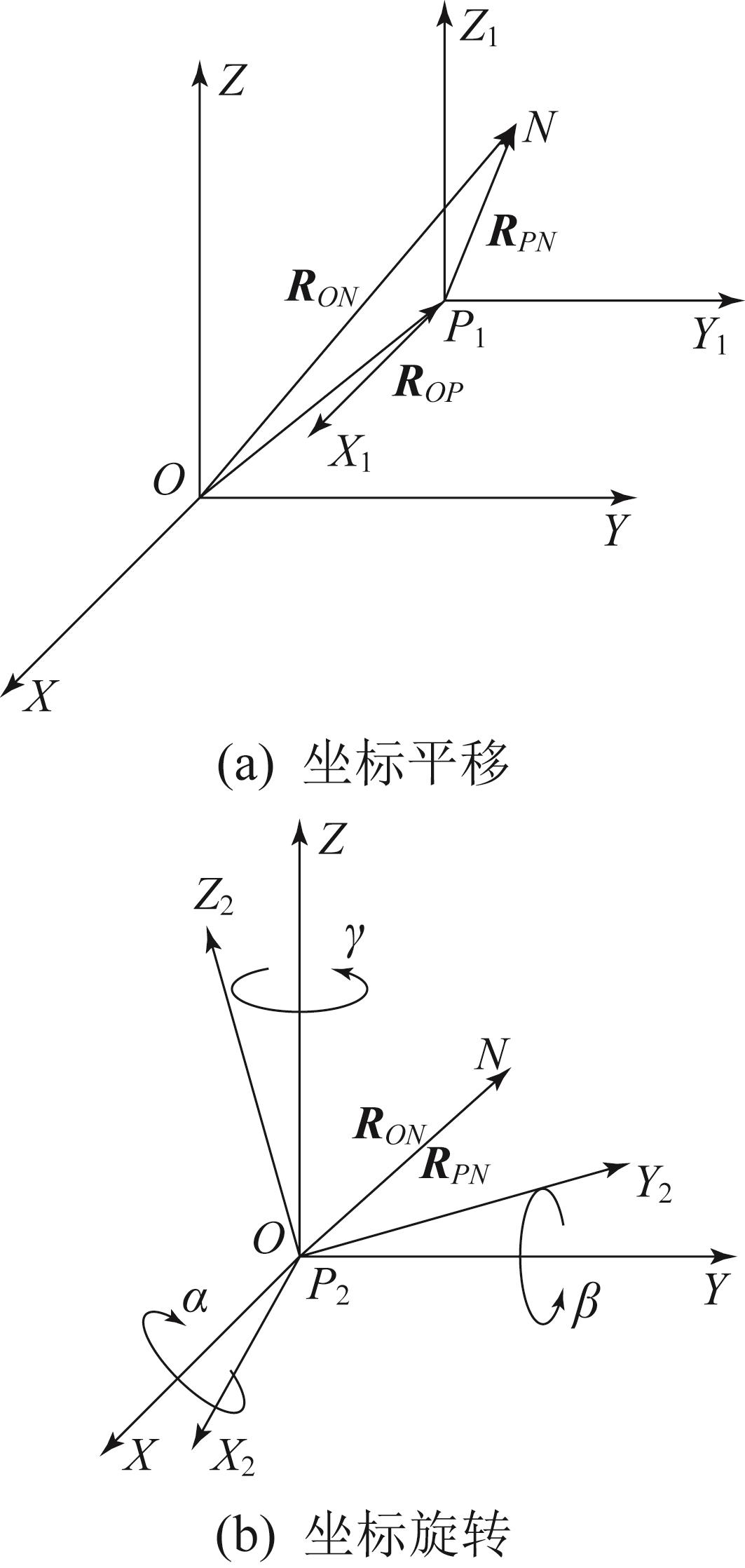
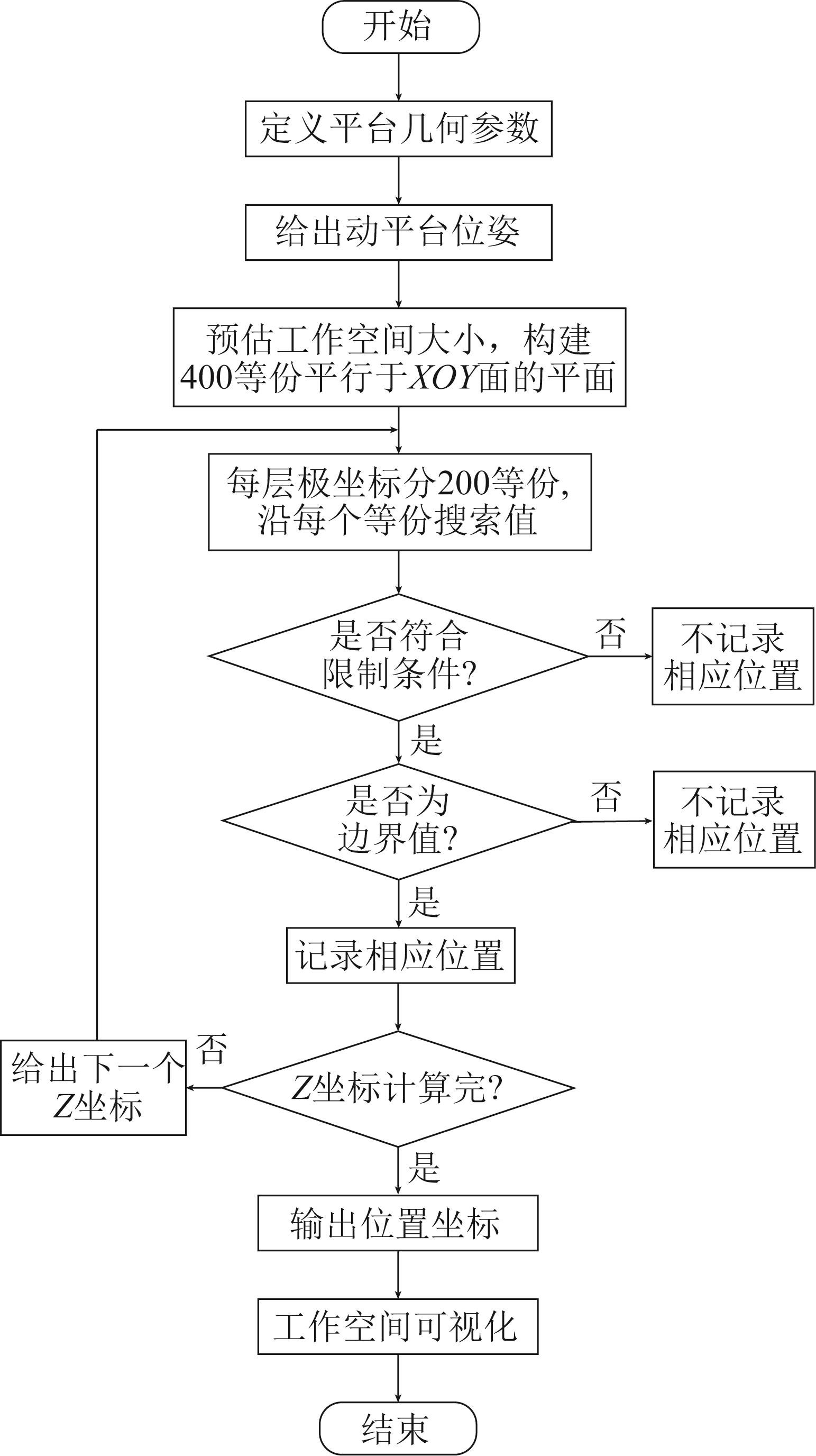
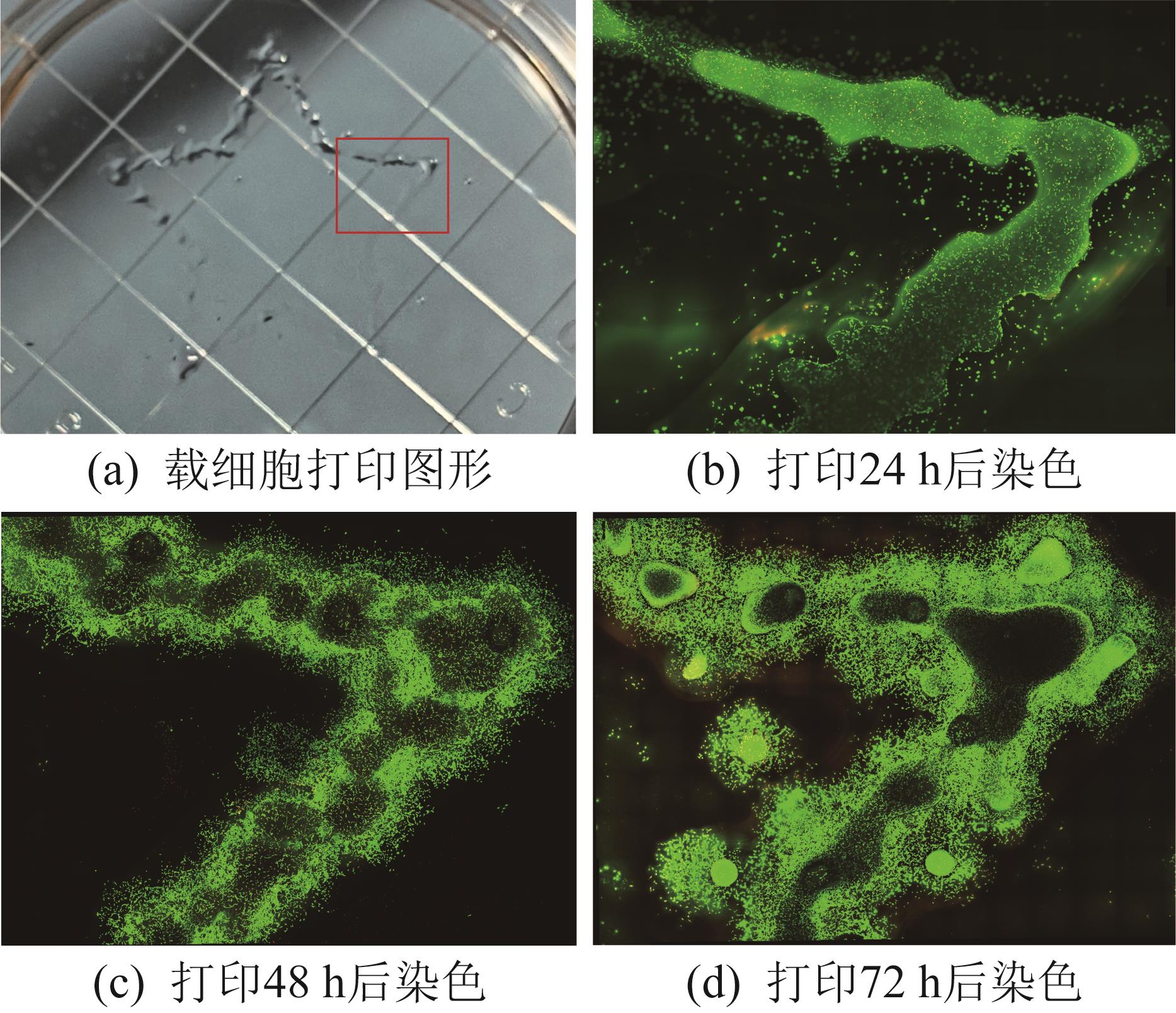
Abstract Biol-3D printing offers a new approach for treating skin injuries. However, the significant three-dimensional morphological heterogeneity inherent in native skin structures poses challenges for their precise replication using the existing methods. Therefore, this study integrated the Stewart parallel robot with the bioprinting technology to develop a dual-nozzle curved-surface skin printing system. Firstly, in order to obtain the workspace of the Stewart parallel robot, the inverse kinematics feasible region of the system was solved. By combining the constraints such as the lengths of the parallel robot's linkages, the rotation angles of the hinges, and the interference between the linkages, the printable angles and effective ranges of the moving platform of the parallel robot under different conditions were obtained. Subsequently, a simulation model of the printing system was constructed to validate the workspace analysis. By controlling the movements of 6 linkages, the kinematic solution of the system was solved, and the movement distance of the nozzle was obtained. Inverse solution calculation and positive solution simulation demonstrated the system's theoretical capability to print skin structures with a maximum angle of 26° and a maximum area of 142 mm × 134 mm. Then, using two types of GelMA hydrogels with two colors exhibiting favorable biocompatibility, the printing system was employed to print a bilaterally symmetric pentagonal star structure, a horizontal double-layer structure with a side length of 18 mm, and a curved-surface double-layer structure with an angle of 18°. Finally, in order to verify the functionality and practicality of the printing system, cell-laden printing was performed, and the survival rate and growth status of the printed cells were obtained. This research is expected to provide an effective method for printing real skin.
|
|
Received: 13 May 2025
Published: 31 October 2025
|
|
|
|
Corresponding Authors:
Song LI
E-mail: 2451505264@qq.com;lisong@sia.com
|
基于Stewart并联机器人的皮肤生物3D打印方法研究
生物3D打印为皮肤损伤提供了新型治愈方法,然而真实皮肤结构所具有的三维形态显著异质性导致现有的打印方法难以实现真实皮肤打印。因此,将Stewart并联机器人与生物3D打印技术相结合,设计了双喷头曲面皮肤打印系统。首先,为了获取Stewart并联机器人的工作空间,求解系统逆运动学可行域,结合并联机器人支链长度、铰链转角以及支链间干涉等约束条件,得出了并联机器人动平台在不同条件下的可打印角度和有效范围。其次,为了验证打印系统工作空间的准确性,建立了打印系统仿真模型,通过控制6条支链的运动,求解系统的运动学正解,得到了喷头的移动距离。经过逆解运算和正解仿真得出,皮肤打印系统理论上可打印最大角度为26°和最大面积为142 mm×134 mm的皮肤结构。然后,采用具有良好生物相容性的2种颜色的GelMA水凝胶,利用打印系统打印出左右对称的五角星结构、边长为18 mm的水平双层结构和角度为18°的曲面双层结构。最后,为了验证打印系统的功能性和实际应用价值,进行载细胞打印,得到了打印后细胞的成活率和生长状况。该研究有望为真实皮肤的打印提供一种有效的方法。
关键词:
皮肤打印,
打印方法,
Stewart并联机器人,
工作空间分析
|
|
| [[1]] |
TANFANI J D, MONPARA J D, JONNALAGADDA S. 3D bioprinting and its role in a wound healing renaissance[J]. Advanced Materials Technologies, 2023, 8(17): 2300411.
|
|
|
| [[2]] |
AVELINO T M, HARB S V, ADAMOSKI D, et al. Unveiling the impact of hypodermis on gene expression for advancing bioprinted full-thickness 3D skin models[J]. Communications Biology, 2024, 7(1): 1437.
|
|
|
| [[3]] |
HAN L, LIU Z X, LI M, et al. 3D bioprinting of a dermal scaffold for full-thickness skin tissue regeneration[J]. Bio-Design and Manufacturing, 2025, 8(1): 68-84.
|
|
|
| [[4]] |
DE SOUZA A, DOS SANTOS JORGE SOUSA K, ESTADELLA D. 3D printed wound constructs for skin tissue engineering: a systematic review in experimental animal models[J]. Journal of Biomedical Materials Research Part B: Applied Biomaterials, 2023, 111(7): 1419-1433.
|
|
|
| [[5]] |
ZHANG D Q, LAI L Y, FU H J, et al. 3D-bioprinted biomimetic multilayer implants comprising microfragmented adipose extracellular matrix and cells improve wound healing in a murine model of full-thickness skin defects[J]. ACS Applied Materials & Interfaces, 2023, 15(25): 29713-29728.
|
|
|
| [[6]] |
SHANTO P C, PARK S, FAHAD M A AL, et al. 3D bio-printed proteinaceous bioactive scaffold loaded with dual growth factor enhanced chondrogenesis and in situ cartilage regeneration[J]. Bioactive Materials, 2025, 46: 365-385.
|
|
|
| [[7]] |
CHEN K, LIU Z, ZHOU X, et al. Hierarchy reproduction: Multiphasic strategies for tendon/ligament-bone junction repair[J]. Biomater Res, 2025, 29: 0132.
|
|
|
| [[8]] |
WU L S, LI H S, LIU Y S, et al. Research progress of 3D-bioprinted functional pancreas and in vitro tumor models[J]. International Journal of Bioprinting, 2024, 10(1): 1256.
|
|
|
| [[9]] |
XU H Q, ZHANG S K, SONG K D, et al. Droplet-based 3D bioprinting for drug delivery and screening[J]. Advanced Drug Delivery Reviews, 2025, 217: 115486.
|
|
|
| [[10]] |
DENG B, MA Y, HUANG J, et al. Revitalizing liver function in mice with liver failure through transplantation of 3D-bioprinted liver with expanded primary hepatocytes[J]. Science Advances, 2024, 10(23): eado1550.
|
|
|
| [[11]] |
HE C F, HE J K, WU C T, et al. 3D printing for tissue/organ regeneration in China[J]. Bio-Design and Manufacturing, 2025, 8(2): 169-242.
|
|
|
| [[12]] |
CHEN H R, ZHANG H T, SHEN Y, et al. Instant in-situ tissue repair by biodegradable PLA/gelatin nanofibrous membrane using a 3D printed handheld electrospinning device[J]. Frontiers in Bioengineering and Biotechnology, 2021, 9: 684105.
|
|
|
| [[13]] |
NUUTILA K, SAMANDARI M, ENDO Y, et al. In vivo printing of growth factor-eluting adhesive scaffolds improves wound healing[J]. Bioactive Materials, 2022, 8: 296-308.
|
|
|
| [[14]] |
ALBANNA M, BINDER K W, MURPHY S V, et al. In situ bioprinting of autologous skin cells accelerates wound healing of extensive excisional full-thickness wounds[J]. Scientific Reports, 2019, 9(1): 1856.
|
|
|
| [[15]] |
ZHANG T, SHENG S H, CAI W H, et al. 3-D bioprinted human-derived skin organoids accelerate full-thickness skin defects repair[J]. Bioactive Materials, 2024, 42: 257-269.
|
|
|
| [[16]] |
ZHAO W X, HU C X, WANG Y N, et al. Optimization-based conformal path planning for in situ bioprinting during complex skin defect repair[J]. Bio-Design and Manufacturing, 2025, 8(1): 1-19.
|
|
|
| [[17]] |
BARJUEI E S, SHIN J, KIM K, et al. Precision improvement of robotic bioprinting via vision-based tool path compensation[J]. Scientific Reports, 2024, 14(1): 17764.
|
|
|
| [[18]] |
PARK J A, YOON S, KWON J, et al. Freeform micropatterning of living cells into cell culture medium using direct inkjet printing[J]. Scientific Reports, 2017, 7(1): 14610.
|
|
|
| [[19]] |
NEGRO A, CHERBUIN T, LUTOLF M P. 3D inkjet printing of complex, cell-laden hydrogel structures[J]. Scientific Reports, 2018, 8(1): 17099.
|
|
|
| [[20]] |
李碧良, 陈志峰. 五自由度并联包装机器人运动学及工作空间分析[J]. 现代机械, 2024(6): 22-26.
LI B L, CHEN Z F. Kinematic and workspace analysis of a five-degree-of-freedom parallel packaging robot[J]. Modern Machinery, 2024(6): 22-26.
|
|
|
| [[21]] |
樊建中, 徐邦联, 张雷洪, 等. Stewart型六自由度平台正解及工作空间分析[J]. 智能计算机与应用, 2025, 15(2): 77-84.
FAN J Z, XU B L, ZHANG L H, et al. Forward kinematics and workspace analysis of the Stewart-type six-degree-of-freedom platform[J]. Intelligent Computer and Applications, 2025, 15(2): 77-84.
|
|
|
| [[22]] |
胡凯文, 张龙. 一种四自由度并联机构的运动学及工作空间分析[J]. 机械设计与制造, 2025(4): 66-71.
HU K W, ZHANG L. Kinematics and workspace analysis of a four-DOF parallel mechanism[J]. Machinery Design & Manufacture, 2025(4): 66-71.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|