| Optimization Design |
|

|
|
|
| Dynamic characteristic modeling and layout optimization of industrial robot cables |
Xiang LI1( ),Yourui TAO1,Jia WANG2,Yang ZHANG3,Chenghao YANG1() ),Yourui TAO1,Jia WANG2,Yang ZHANG3,Chenghao YANG1() |
1.School of Mechanical Engineering, Hebei University of Technology, Tianjin 300401, China
2.School of Electrical Engineering, Hebei University of Technology, Tianjin 300401, China
3.Nanjing Estun Automation Co. , Ltd. , Nanjing 211100, China |
|
|
|
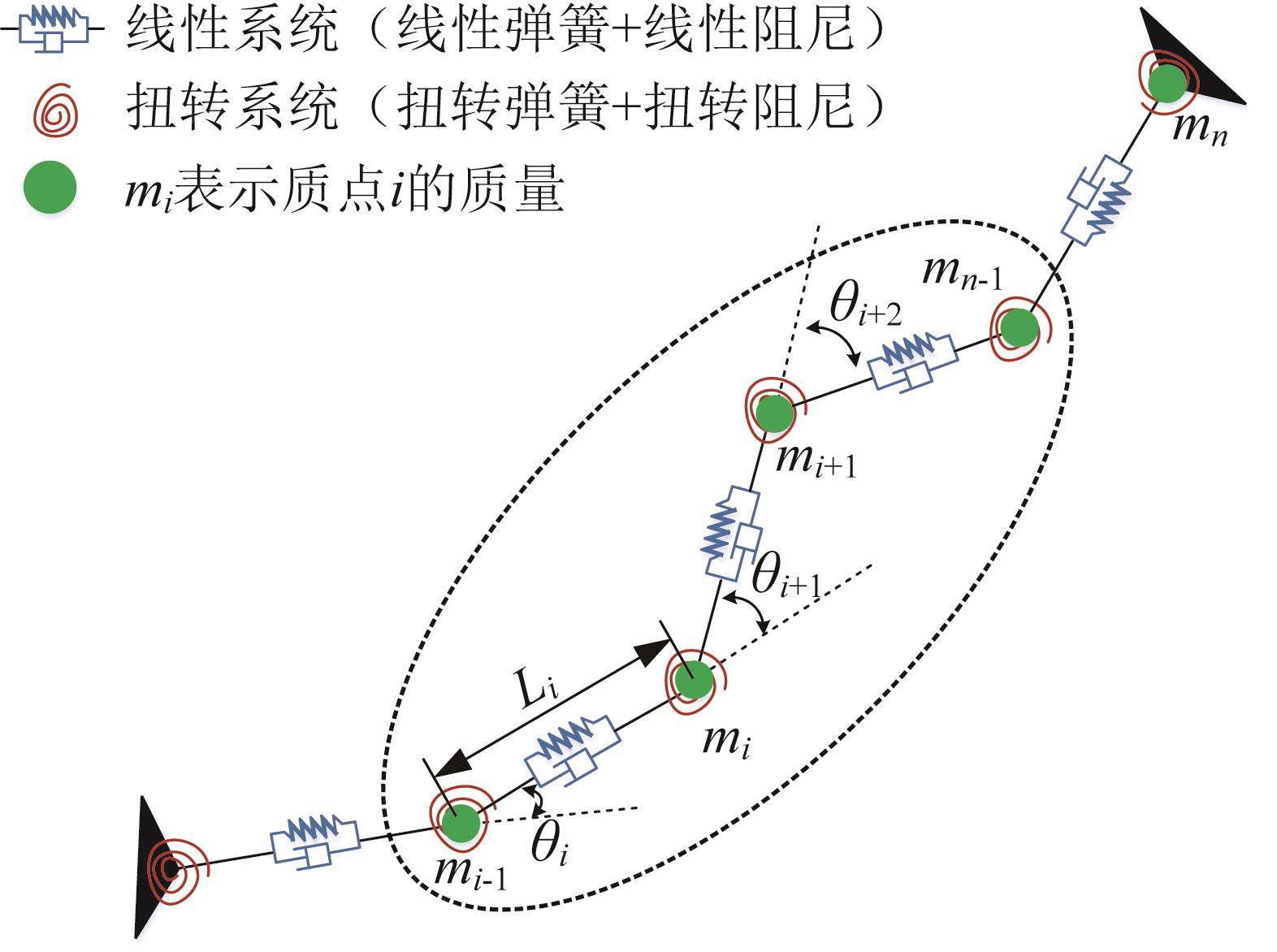
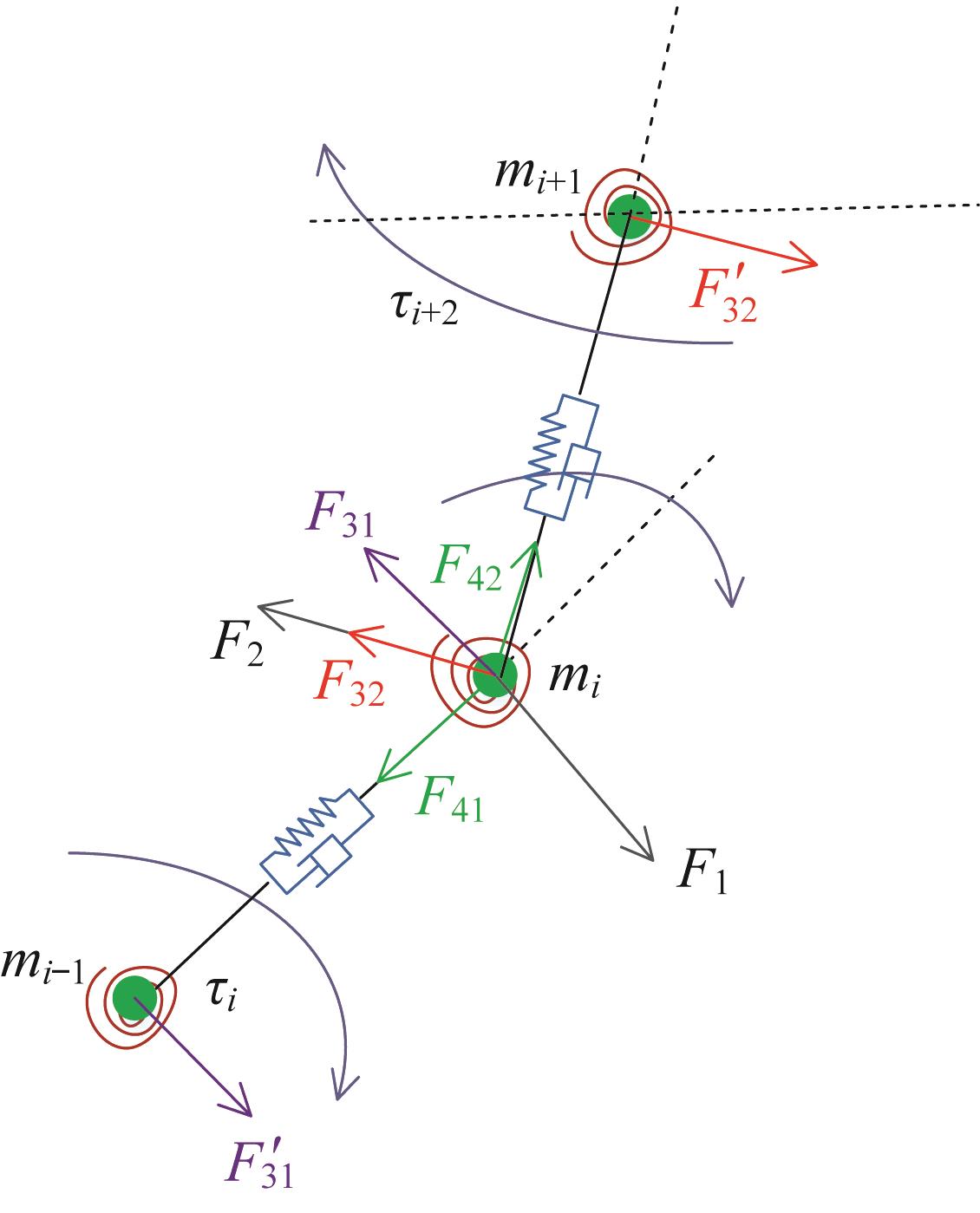
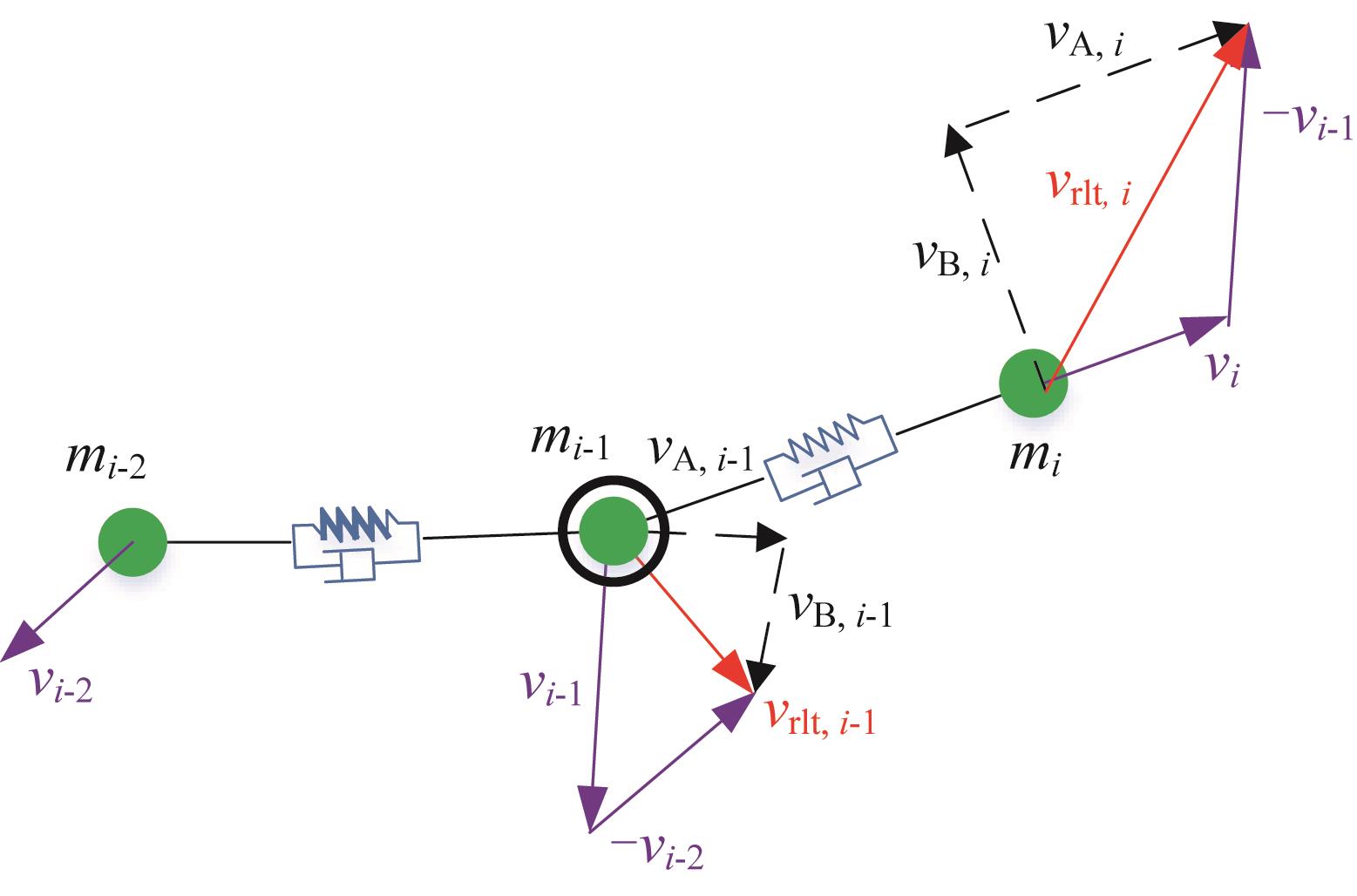
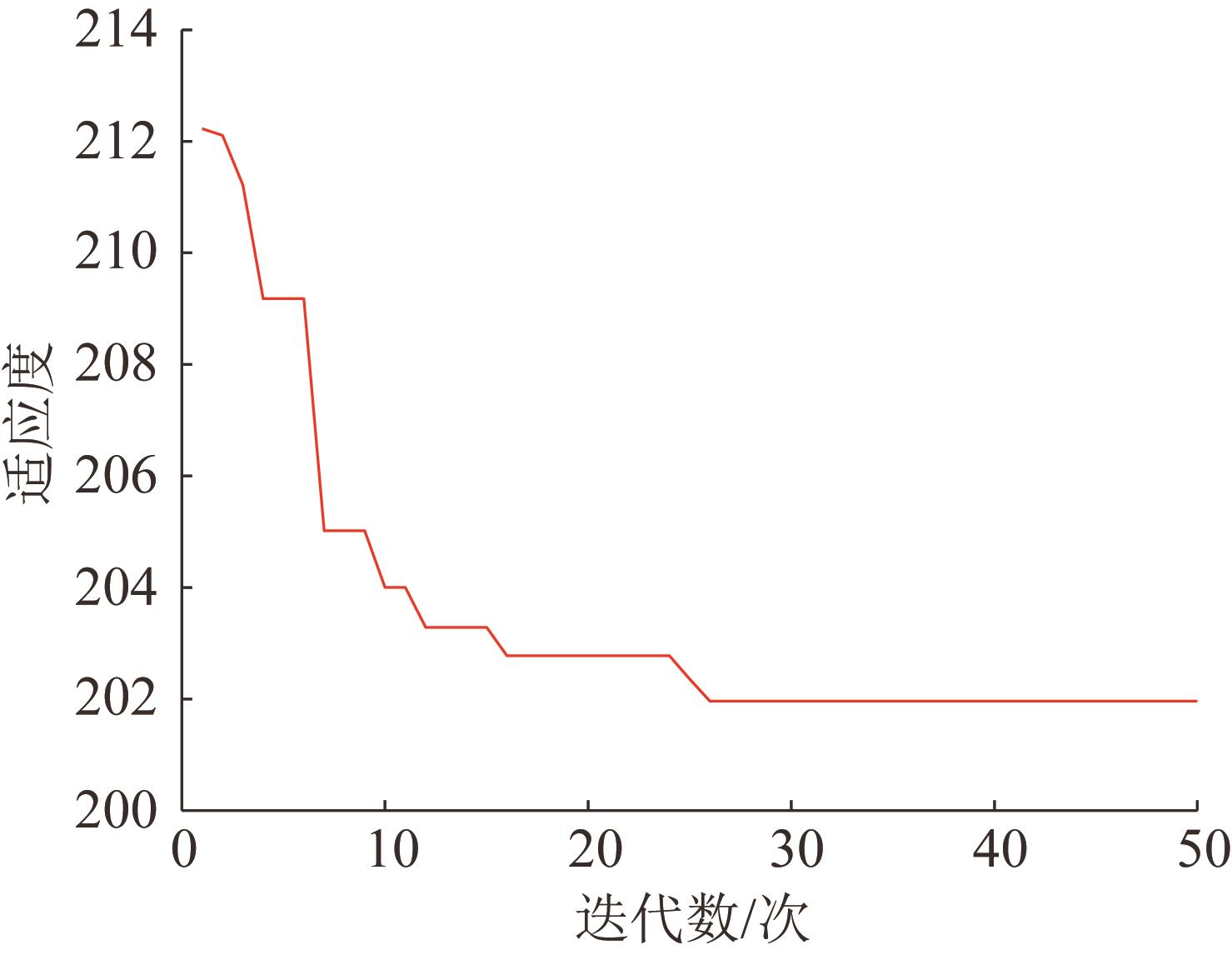
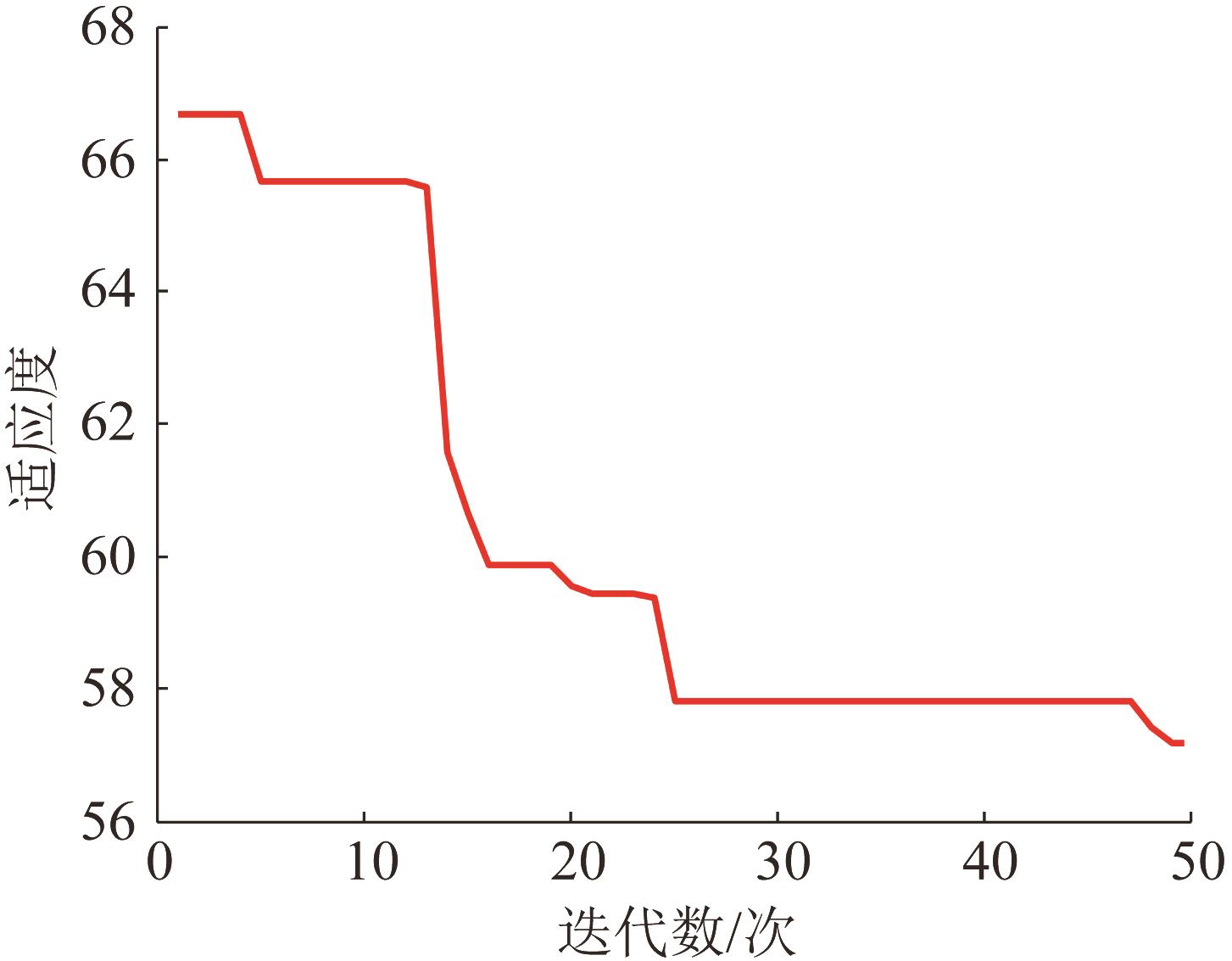
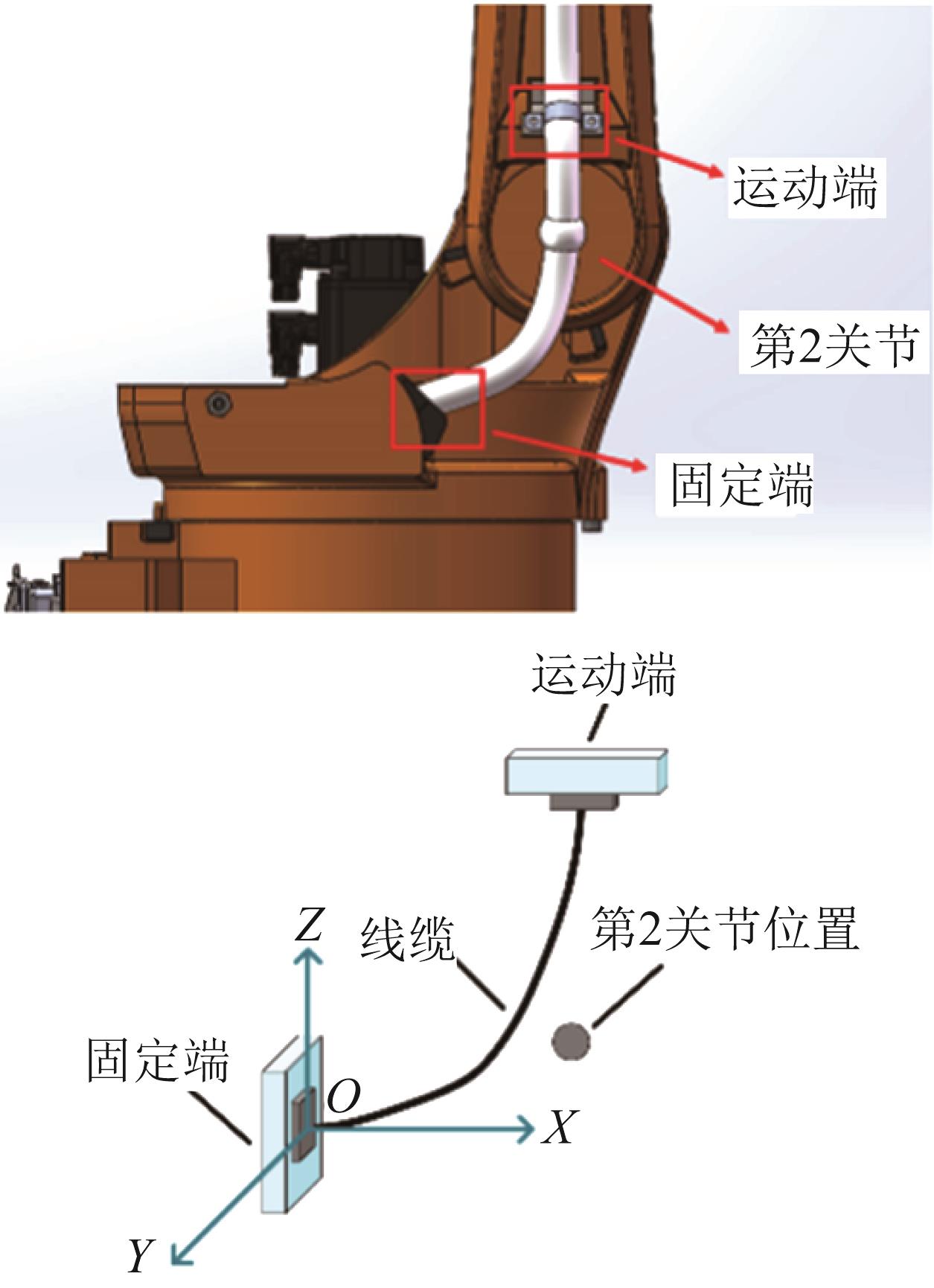
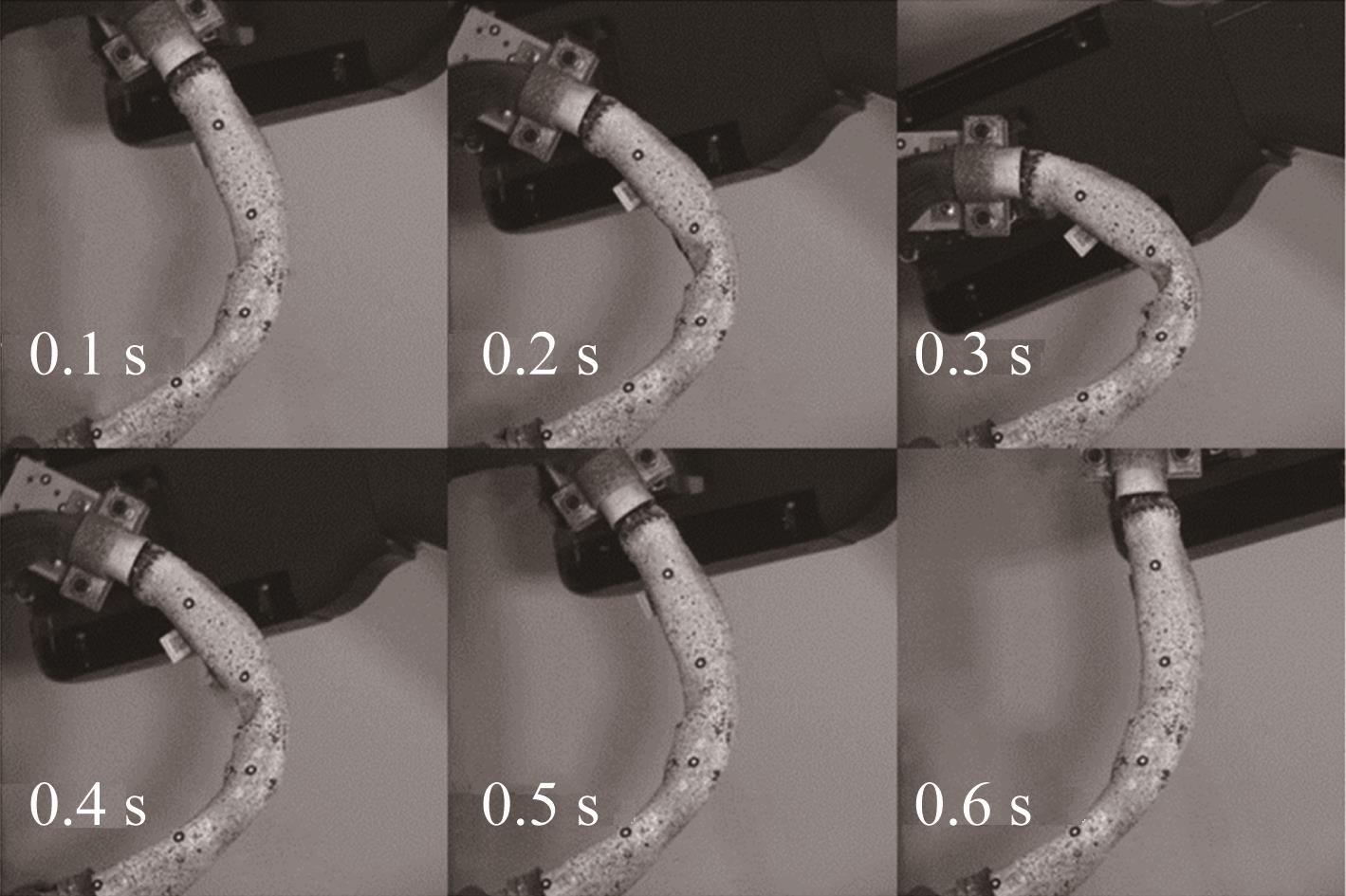
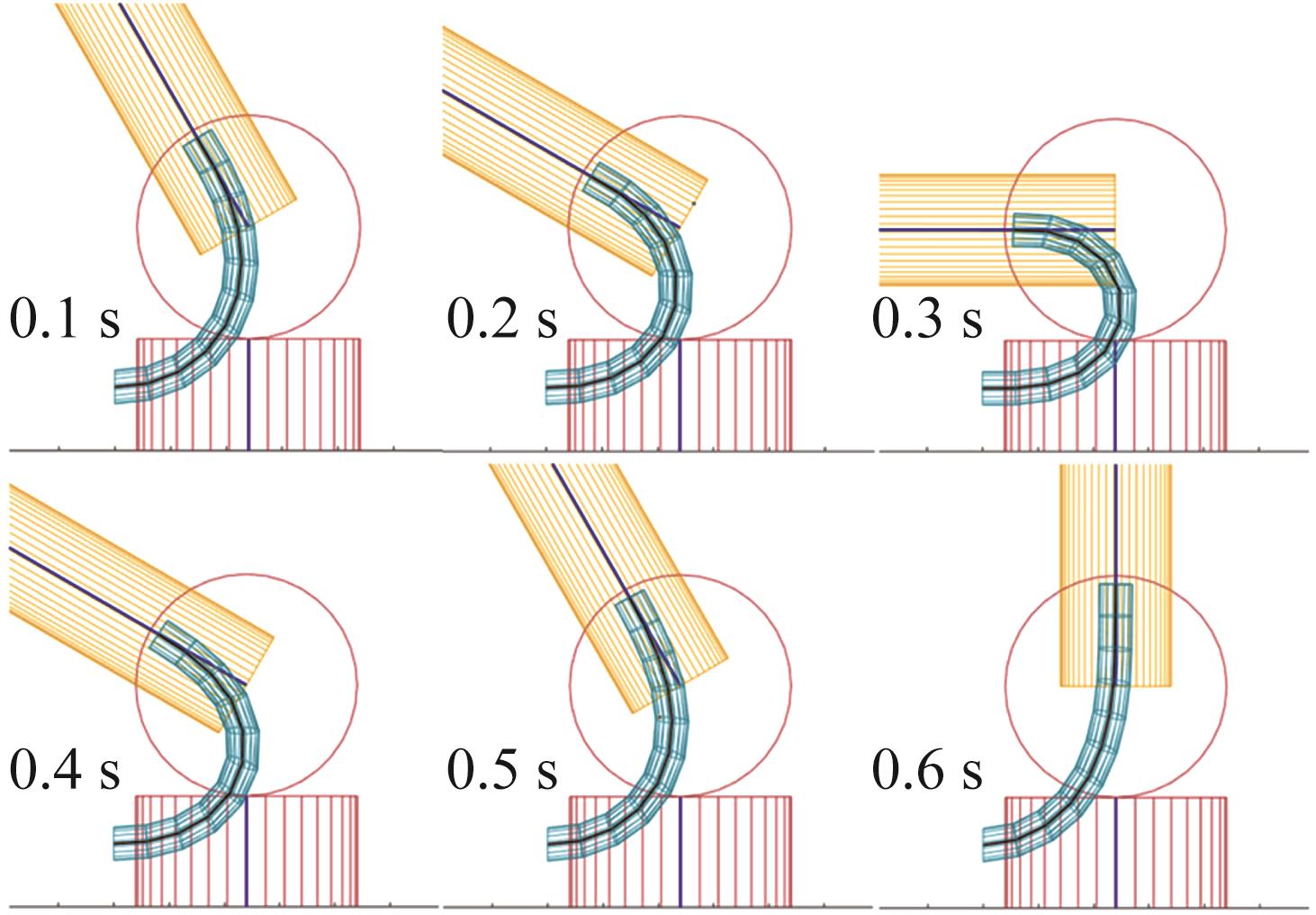
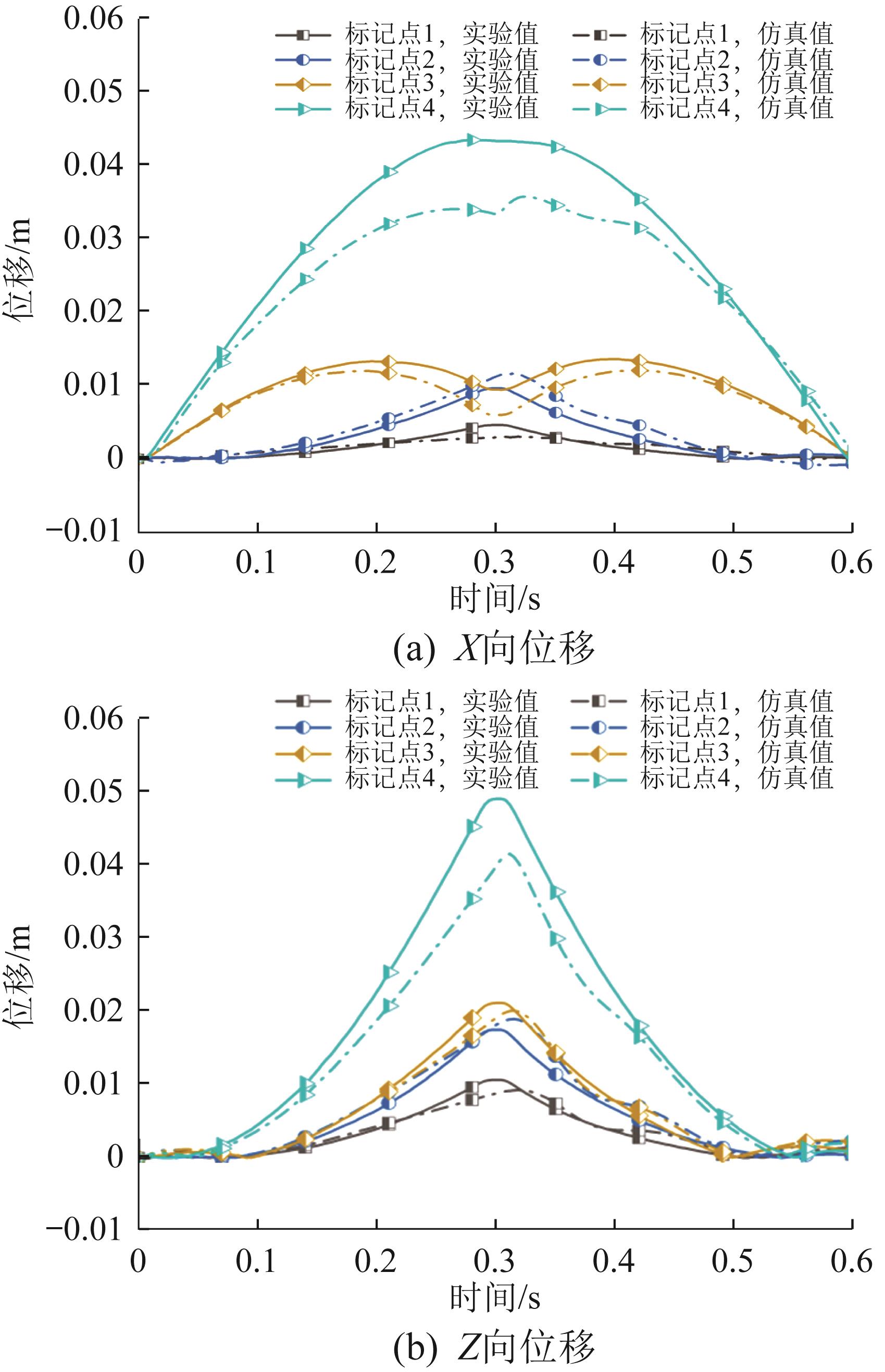
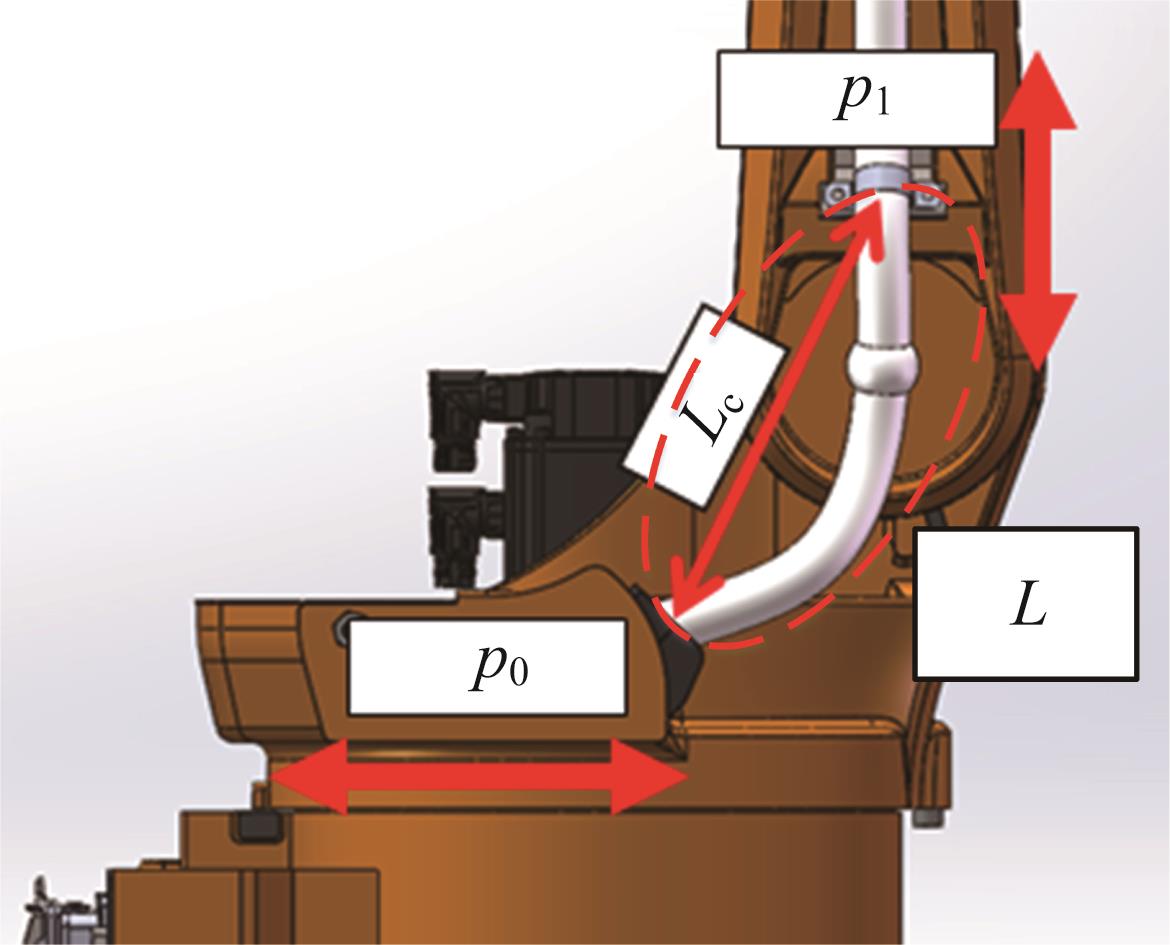
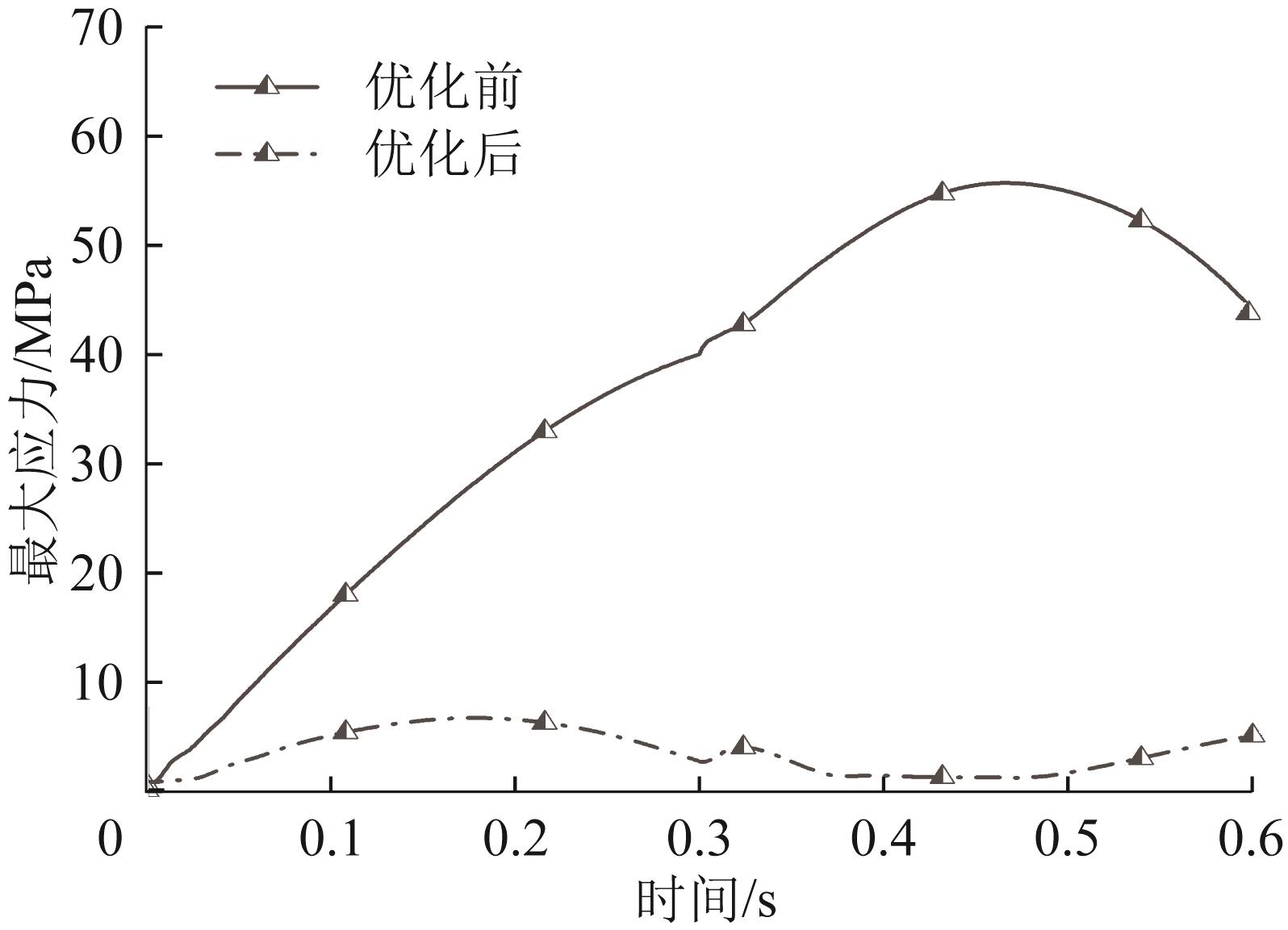
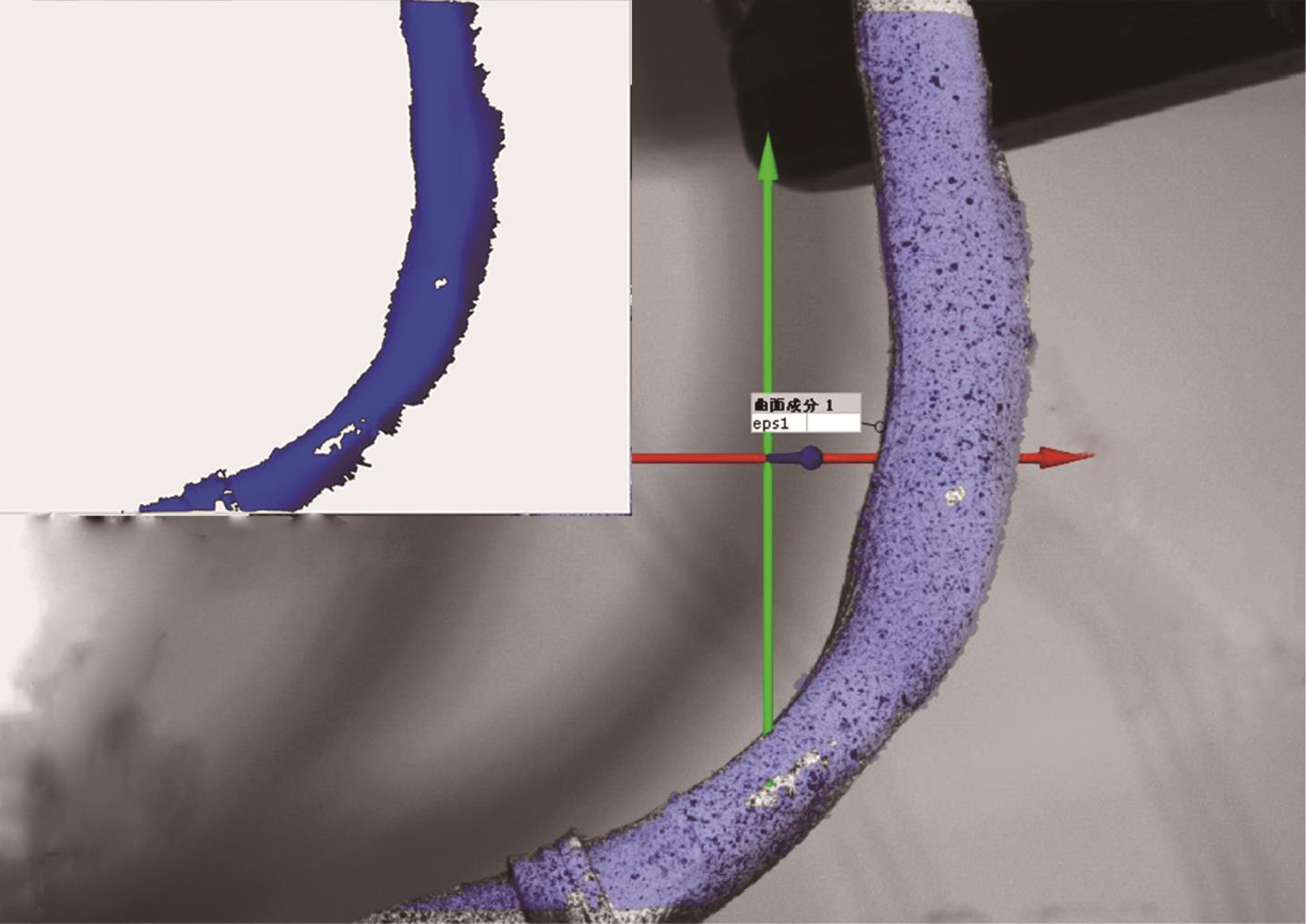
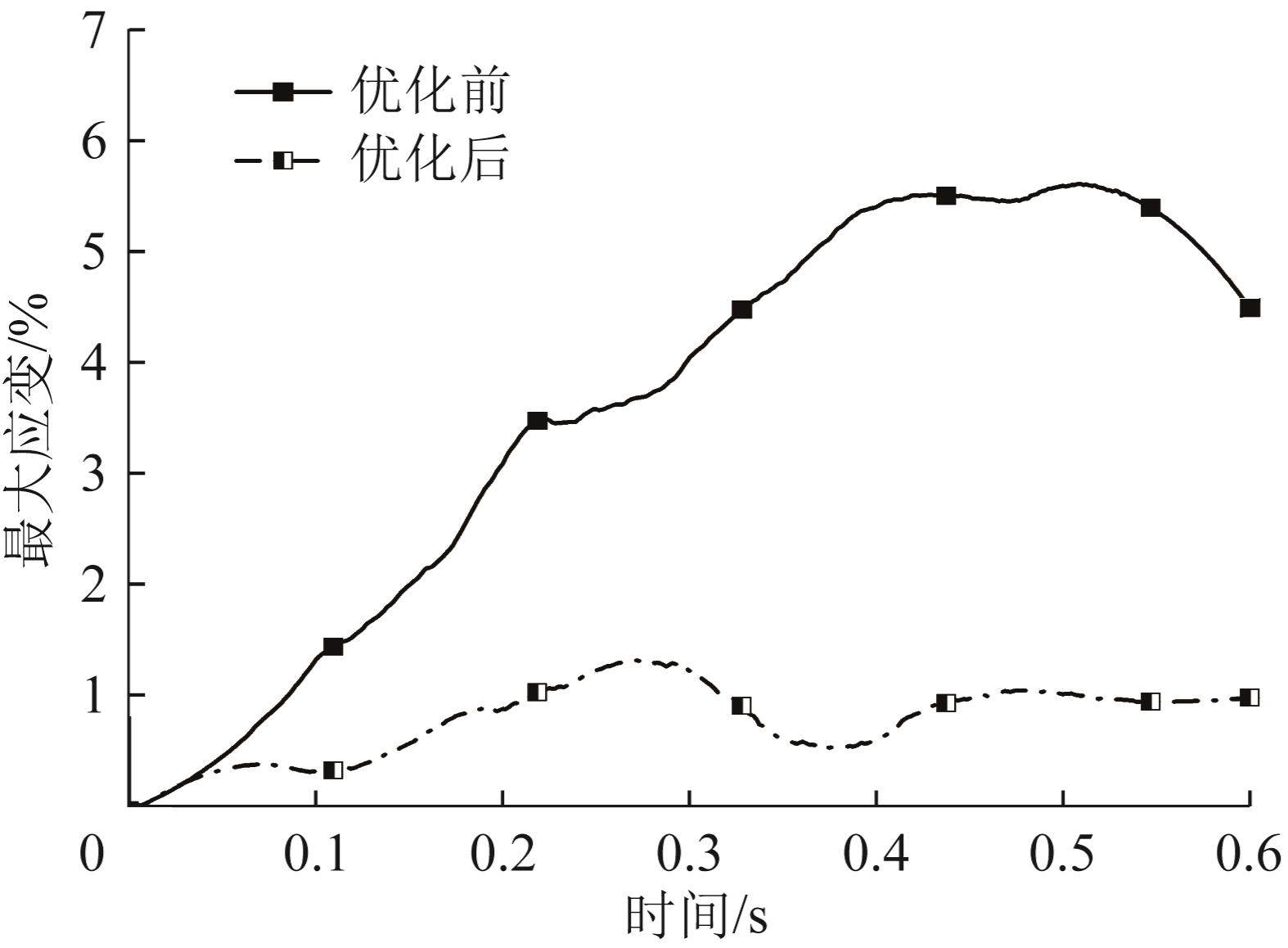
Abstract The deformation characteristics of industrial robot cables are one of the main factors influencing the service lifespan of cables. In order to describe the movement pattern of the cables and mitigate the impact of cable routing on the lifespan of cables, a flexible cable modeling method based on the spring-damper chain equivalent was proposed. The cable was divided through linear springs, linear dampers, torsional springs and torsional dampers, achieving the dynamics description of its particles. And based on the Newton method, the force analysis was conducted for each particle. The cable movement process was discretized into a collection of movements in multiple tiny time intervals. The dynamics parameters at the current moment were obtained through dynamics analysis. After a movement in a tiny time interval, the position of each particle at the next moment could be derived. By iterating the above steps, the dynamic pattern of the cable could be simulated, and the movement simulation of the cable at the joint of industrial robot was realized. Subsequently, the optimal parameters of the cable dynamics model were determined through experiments, and the simulated pattern of dynamics model after parameters optimization was compared with the actual movement pattern of industrial robot cable to validate the accuracy of the dynamics model. Finally, an optimization scheme for the cable layout of industrial robot was obtained, with the objective of minimizing the maximum stress on cable model. The research results provide a theoretical basis for improving the service lifespan of industrial robot cables.
|
|
Received: 01 November 2024
Published: 02 July 2025
|
|
|
|
Corresponding Authors:
Chenghao YANG
E-mail: l_xiang2024@163.com;c.yang@hebut.edu.cn
|
工业机器人线缆动态特性建模与布局优化
工业机器人线缆变形特性是影响线缆使用寿命的主要因素之一。为了描述线缆运动形态,减少线缆布线对线缆寿命的影响,提出了基于弹簧阻尼链式等效的柔性线缆建模方法。将线缆通过线性弹簧、线性阻尼、扭转弹簧和扭转阻尼进行分割,实现了其质点的动力学描述,并基于牛顿法对各质点进行受力分析。将线缆运动过程离散为多个微小时间段内运动的集合,通过动力学分析得到当前时刻的动力学参数,经过一个微小时间内的运动后即可得到下一时刻各质点的位置,迭代上述步骤便可以仿真得到线缆的动态形态,并实现了工业机器人关节处线缆的运动仿真。而后,通过实验确定了线缆动力学模型的最优参数,并将参数优化后的动力学模型仿真形态与工业机器人线缆真实运动形态进行对比,验证了动力学模型的准确性。最后,以线缆模型的最大应力最小为目标,得到了工业机器人线缆布局优化方案。研究结果为提高工业机器人线缆的使用寿命提供了理论基础。
关键词:
工业机器人线缆,
动力学建模,
参数识别,
运动仿真,
布局优化
|
|
| [[1]] |
RAO H Y, WANG N G, DU R. Vibration cascade control for motor-driven deep-sea robot cable system with actuator fault[J]. Journal of Marine Science and Engineering, 2022, 10(11): 1772.
|
|
|
| [[2]] |
WANG S Y, WU J H, TIAN P P, et al. Global sensitivity analysis of dynamic parameters to industrial robots considering spacetime two-dimensional output responses[J]. IEEE Transactions on Reliability, 2025, 74(2): 2813-2826.
|
|
|
| [[3]] |
柳松, 张德权, 吴锦辉, 等. 基于Kriging模型的工业机器人定位精度补偿方法[J]. 河北工业大学学报, 2022, 51(6): 19-24, 46.
LIU S, ZHANG D Q, WU J H, et al. A compensation method for positioning accuracy of industrial robot based on Kriging model[J]. Journal of Hebei University of Technology, 2022, 51(6): 19-24, 46.
|
|
|
| [[4]] |
TERZOPOULOS D, QIN H. Dynamic NURBS with geometric constraints for interactive sculpting[J]. ACM Transactions on Graphics, 1994, 13(2): 103-136.
|
|
|
| [[5]] |
GRÉGOIRE M, SCHÖMER E. Interactive simulation of one-dimensional flexible parts[J]. Computer-Aided Design, 2007, 39(8): 694-707.
|
|
|
| [[6]] |
LOOCK A, SCHÖMER E. A virtual environment for interactive assembly simulation: from rigid bodies to deformable cable[C]//Proceedings of the 5th Word Multiconference on Systemics, Cybernetics and Informatics. New York: Springer Press, 2001: 325-332.
|
|
|
| [[7]] |
金望韬, 刘检华, 刘佳顺, 等. 光滑平面约束下的活动线缆物性建模与运动仿真技术[J]. 机械工程学报, 2016, 52(3): 118-127. doi:10.3901/JME.2016.03.118
JIN W T, LIU J H, LIU J S, et al. Motional cable harness physical characteristic oriented modeling and kinetic simulation technology under smooth plane constraints[J]. Journal of Mechanical Engineering, 2016, 52(3): 118-127.
doi: 10.3901/JME.2016.03.118
|
|
|
| [[8]] |
杨炜烽, 刘检华, 吕乃静, 等. 基于位置动力学的线缆运动过程仿真方法[J]. 机械工程学报, 2024, 60(6): 21-31, 57.
YANG W F, LIU J H, LÜ N J, et al. Method of cable dynamic simulation based on PBD[J]. Journal of Mechanical Engineering, 2024, 60(6): 21-31, 57.
|
|
|
| [[9]] |
HERGENROTHER E, DAHNE P. Real-time virtual cables based on kinematic simulation[C]//International Conference in Central Europe on Computer Graphics and Visualization, Bilson City, Feb. 7-10, 2000.
|
|
|
| [[10]] |
SUEDA S, JONES G L, LEVIN D I W, et al. Large-scale dynamic simulation of highly constrained strands[J]. ACM Transactions on Graphics, 2011, 30(4): 1-10.
|
|
|
| [[11]] |
ZHANG H T, LING H. A feedback tracking system for robot[J]. Applied Mathematics and Mechanics, 1986, 7(8): 775-783.
|
|
|
| [[12]] |
ZHU Z H. Dynamic modeling of cable system using a new nodal position finite element method[J]. International Journal for Numerical Methods in Biomedical Engineering, 2010, 26(6): 692-704.
|
|
|
| [[13]] |
COTTANCEAU E, THOMAS O, VÉRON P, et al. A finite element/quaternion/asymptotic numerical method for the 3D simulation of flexible cables[J]. Finite Elements in Analysis and Design, 2018, 139: 14-34.
|
|
|
| [[14]] |
PARK H, LEE S H, CUTKOSKY M R. Computational support for concurrent engineering of cable harnesses[C]// Proceedings of the 1992 ASME International Computers in Engineering Conference and Exposition. New York: ASME Press, 1992: 261-268.
|
|
|
| [[15]] |
CONRU A B. A genetic approach to the cable harness routing problem[C]//Proceedings of the IEEE Conference on Evolutionary Computation. New York: IEEE, 1994: 200-205.
|
|
|
| [[16]] |
ZHU Z X, VAN TOOREN M, LA ROCCA G. A KBE application for automatic aircraft wire harness routing[C]//53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, Hawaii, April 23-26, 2012.
|
|
|
| [[17]] |
刘潇, 刘检华, 刘佳顺, 等. 基于改进RRT算法的线缆自动布线技术[J]. 机械工程学报, 2015, 51(17): 96-105. doi:10.3901/jme.2015.17.096
LIU X, LIU J H, LIU J S, et al. Improved RRT based cable automatic routing[J]. Journal of Mechanical Engineering, 2015, 51(17): 96-105.
doi: 10.3901/jme.2015.17.096
|
|
|
| [[18]] |
刘潇, 刘检华, 刘佳顺, 等. 基于改进随机路径图的分支线缆自动布局技术[J]. 计算机集成制造系统, 2014, 20(12): 2952-2961.
LIU X, LIU J H, LIU J S, et al. Multi-branch cable automatic routing based on improved PRM[J]. Computer Integrated Manufacturing Systems, 2014, 20(12): 2952-2961.
|
|
|
| [[19]] |
杨啸东, 刘检华, 马江涛, 等. 基于混沌-粒子群算法的柔性线缆装配序列规划技术[J]. 北京理工大学学报, 2020, 40(9): 956-962.
YANG X D, LIU J H, MA J T, et al. Cable assembly sequence planning based on chaos-particle swarm optimization[J]. Transactions of Beijing Institute of Technology, 2020, 40(9): 956-962.
|
|
|
| [[20]] |
王发麟, 郭耀文, 龚建华, 等. 基于数字孪生的复杂机电产品线缆装配工艺模型动态构建方法[J]. 计算机集成制造系统, 2023, 29(6): 2047-2061.
WANG F L, GUO Y W, GONG J H, et al. Dynamic construction method of cable assembly process model for complex mechatronic products based on digital twin[J]. Computer Integrated Manufacturing Systems, 2023, 29(6): 2047-2061.
|
|
|
| [[21]] |
康荣杰, 周永翔, 杨铖浩. 面向非合作目标的柔性捕获器设计与动力学建模[J]. 天津大学学报(自然科学与工程技术版), 2022, 55(2): 174-183.
KANG R J, ZHOU Y X, YANG C H. Design and dynamic modeling of a flexible catcher for noncooperative targets[J]. Journal of Tianjin University (Science and Technology), 2022, 55(2): 174-183.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|