| Robotic and Mechanism Design |
|

|
|
|
| Forward kinematics modeling and optimal design of multi-segment stacked hybrid mechanism |
Yang QI( ),Yuanhang LOU() ),Yuanhang LOU() |
| School of Mechanical Engineering, Tianjin University of Technology and Education, Tianjin 300222, China |
|
|
|
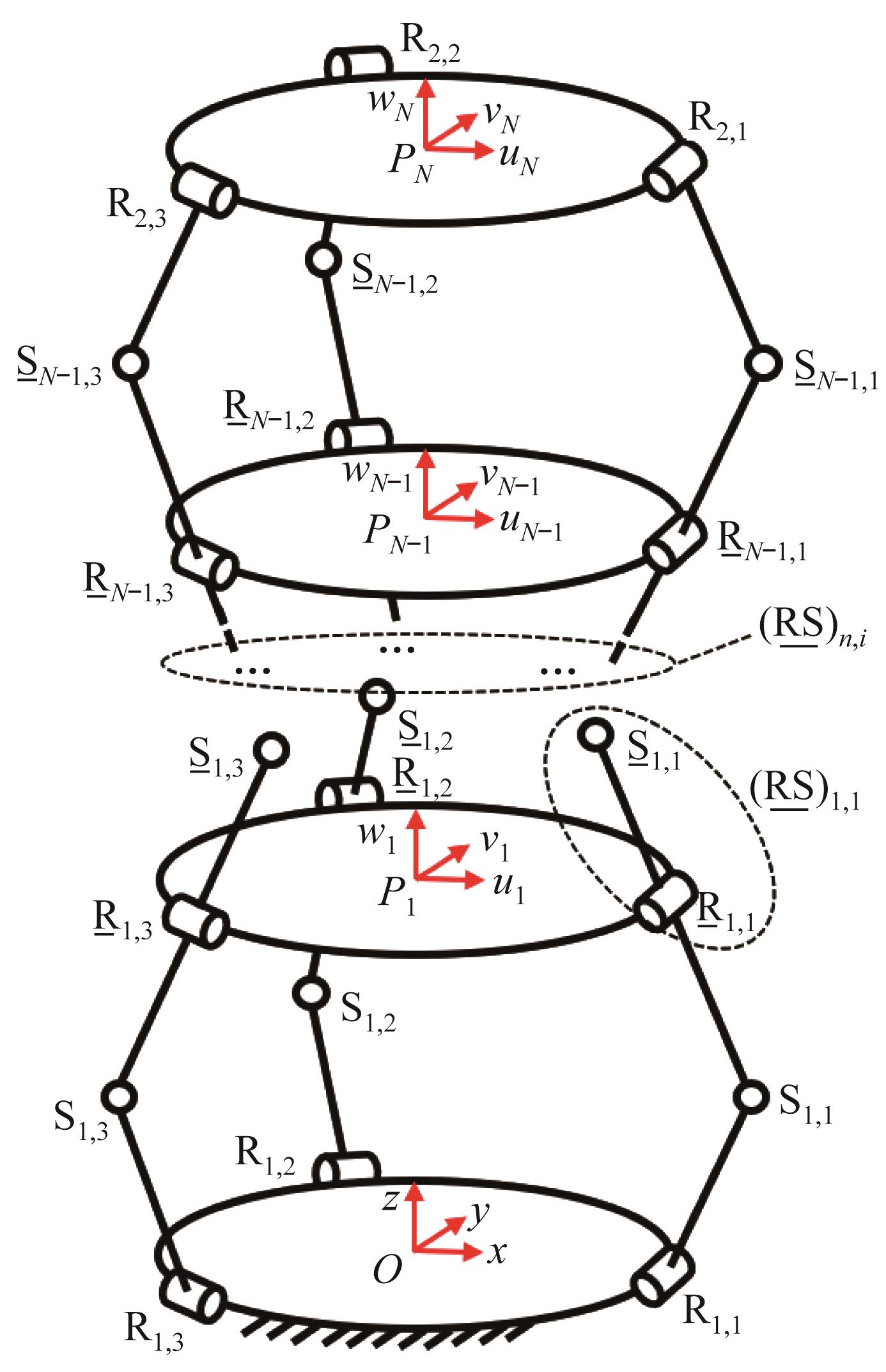
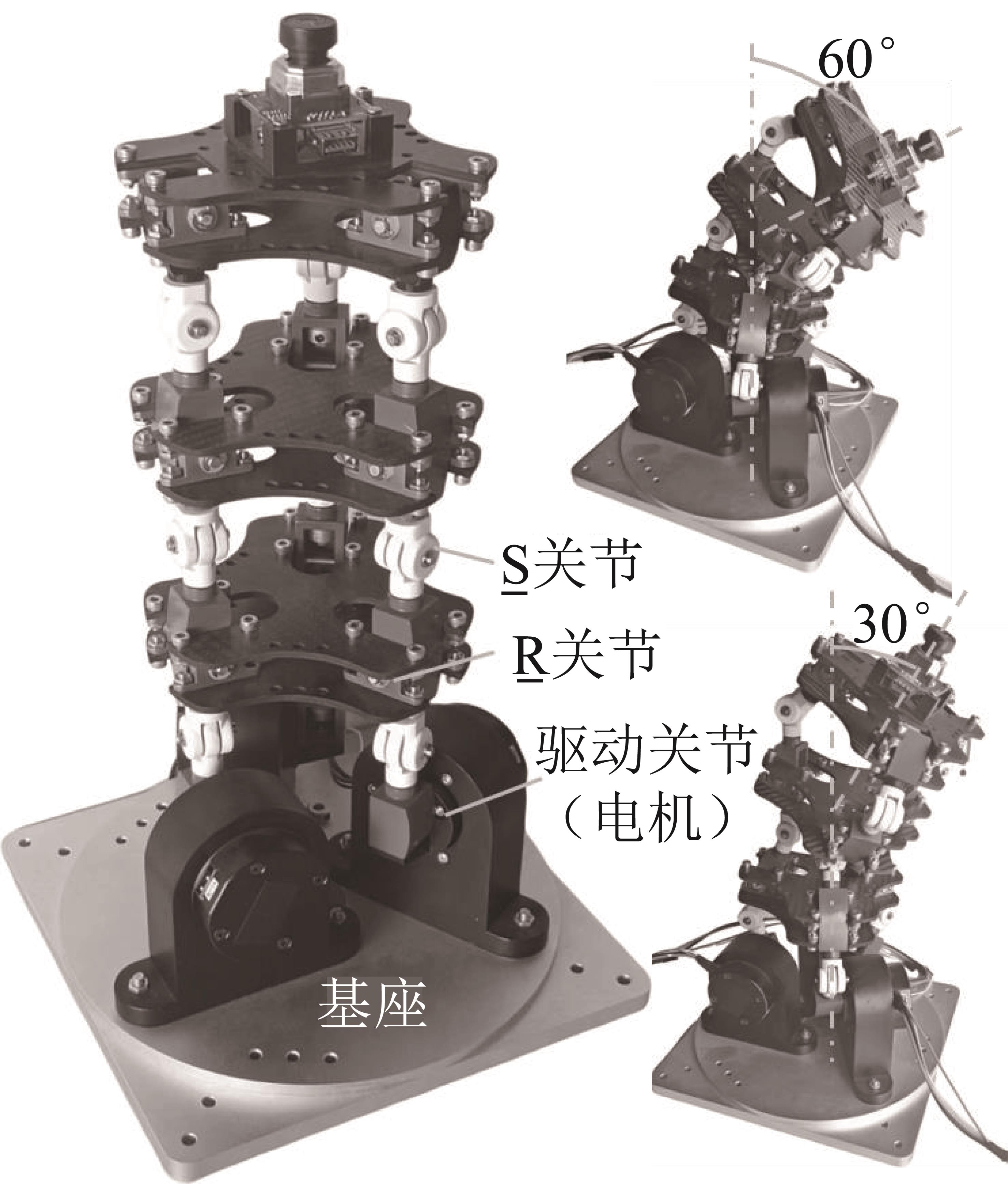
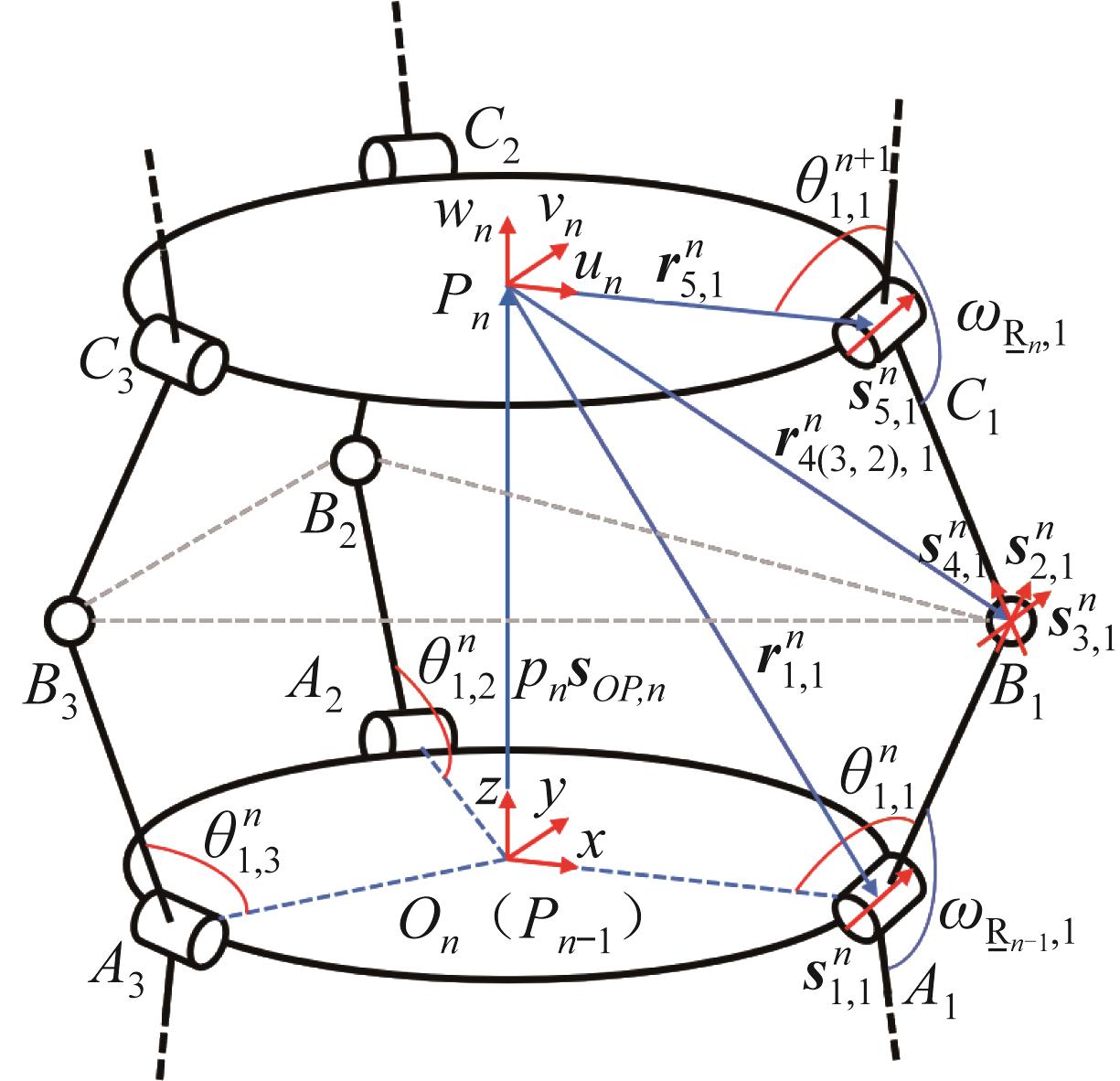
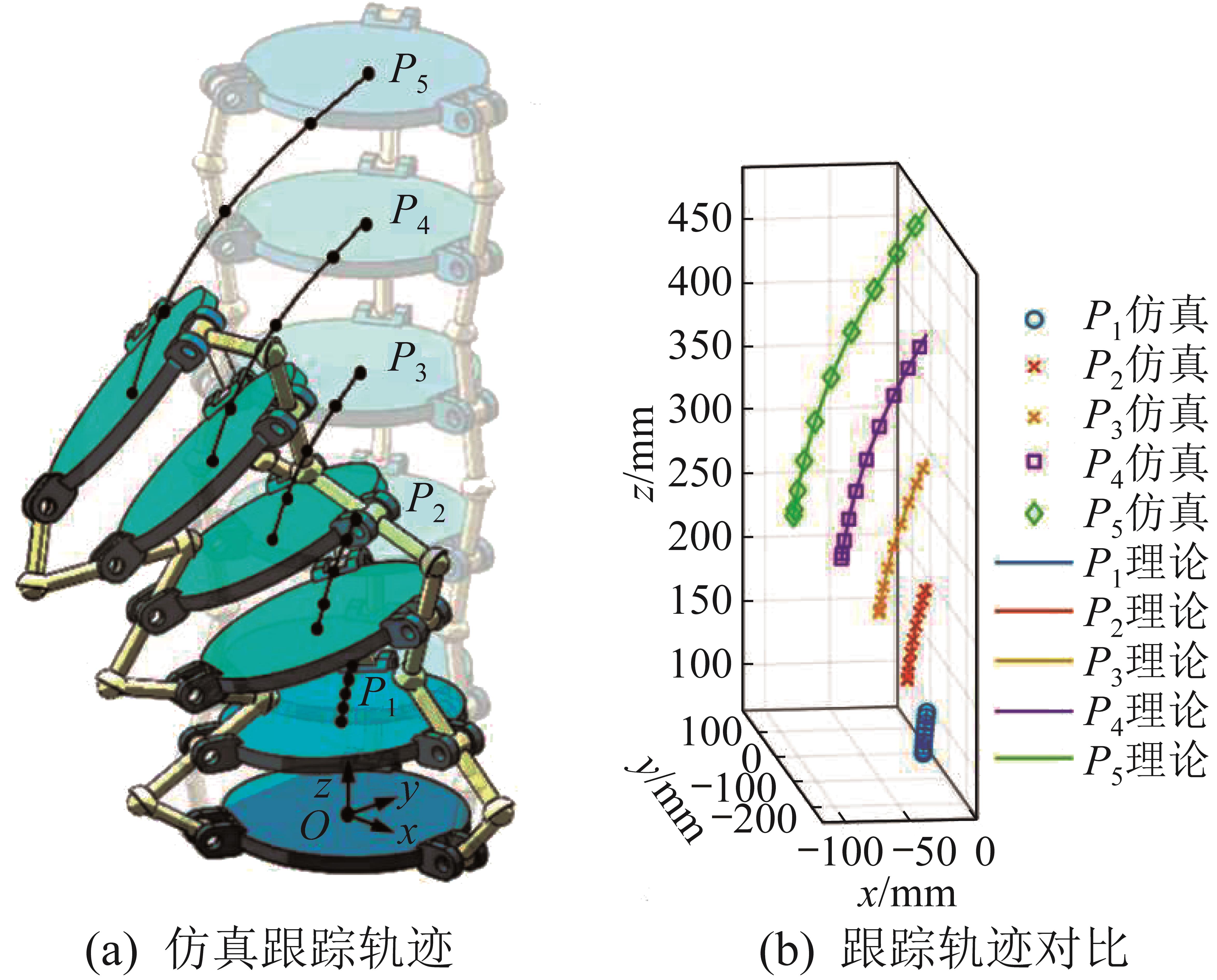
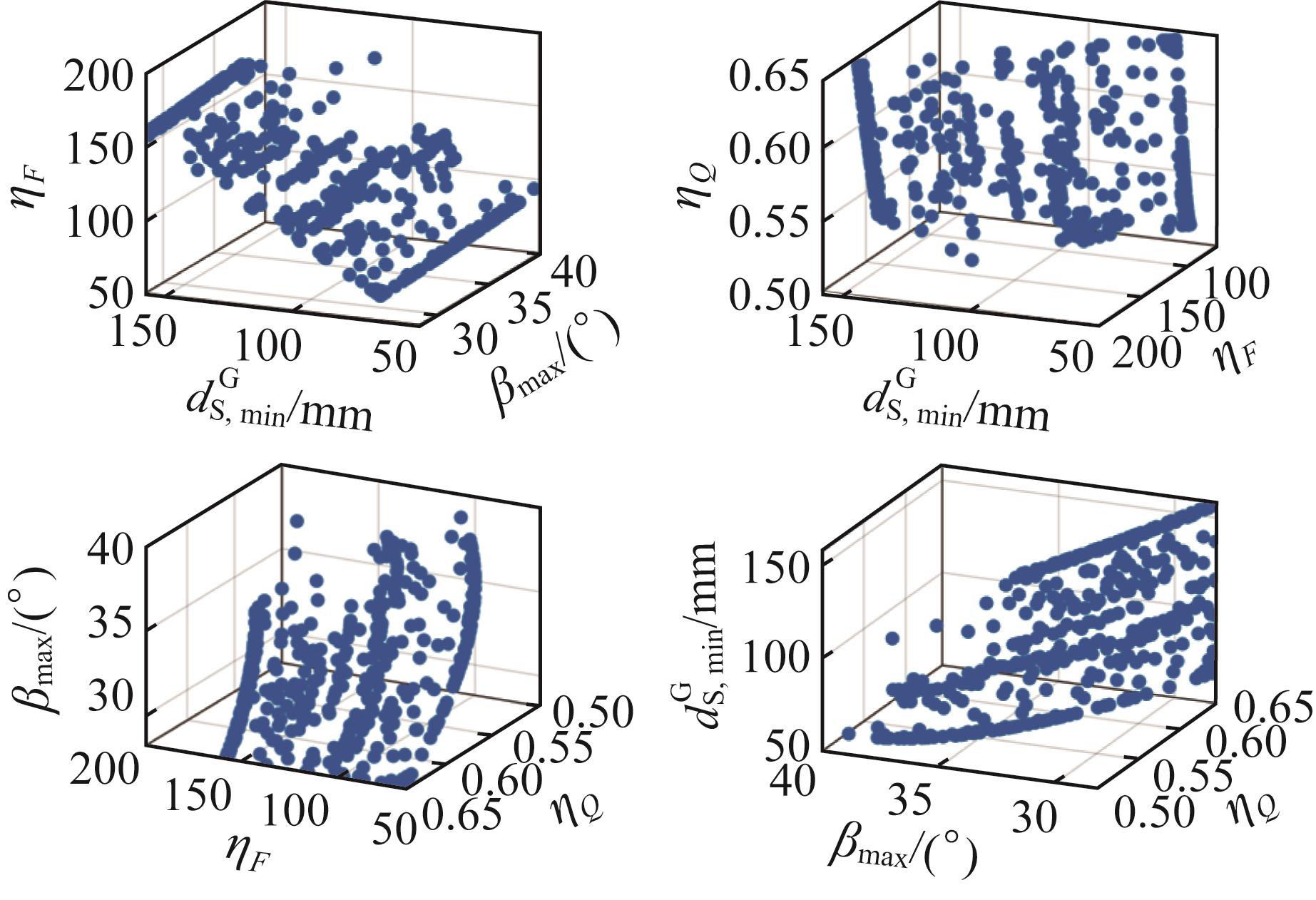
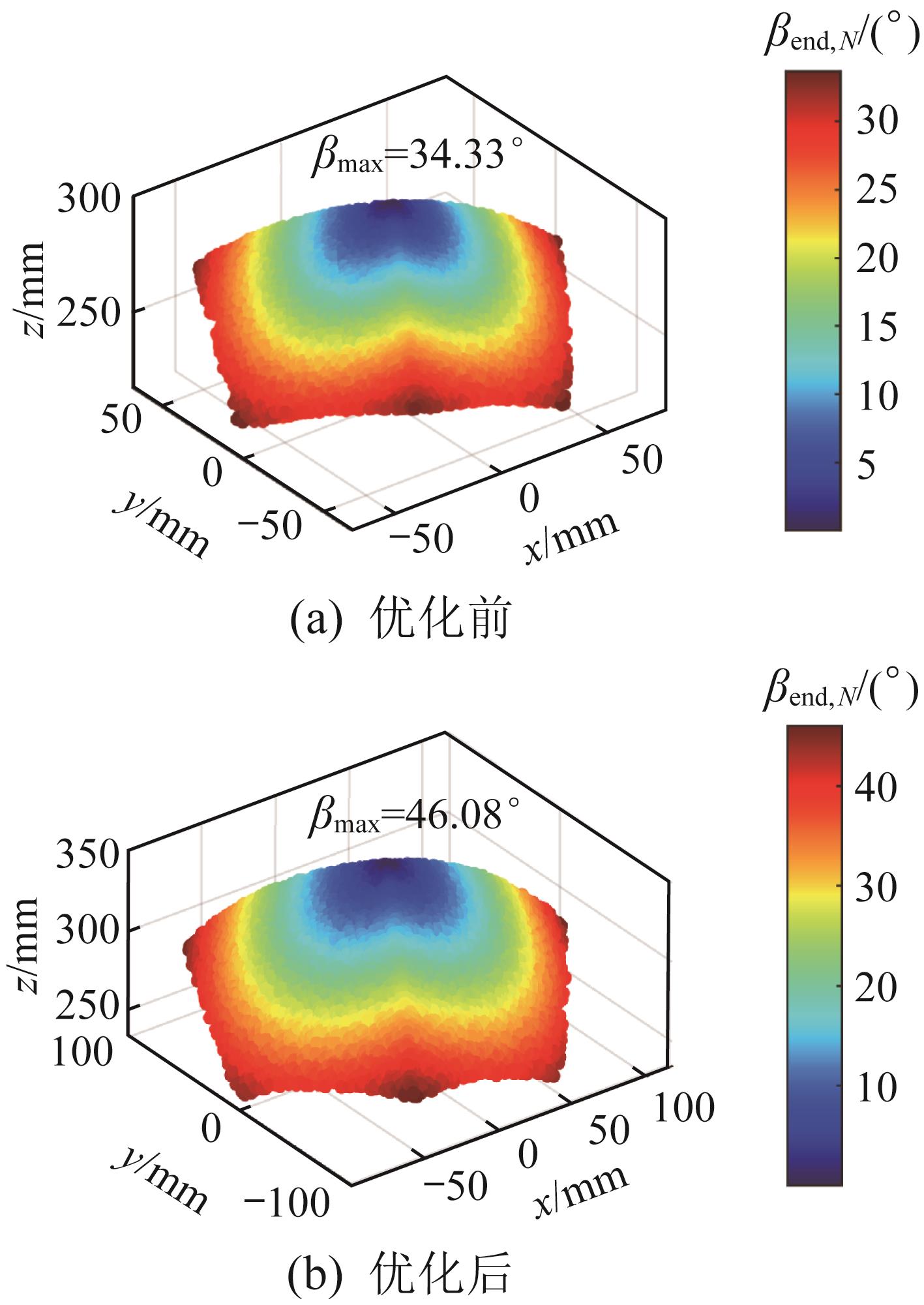
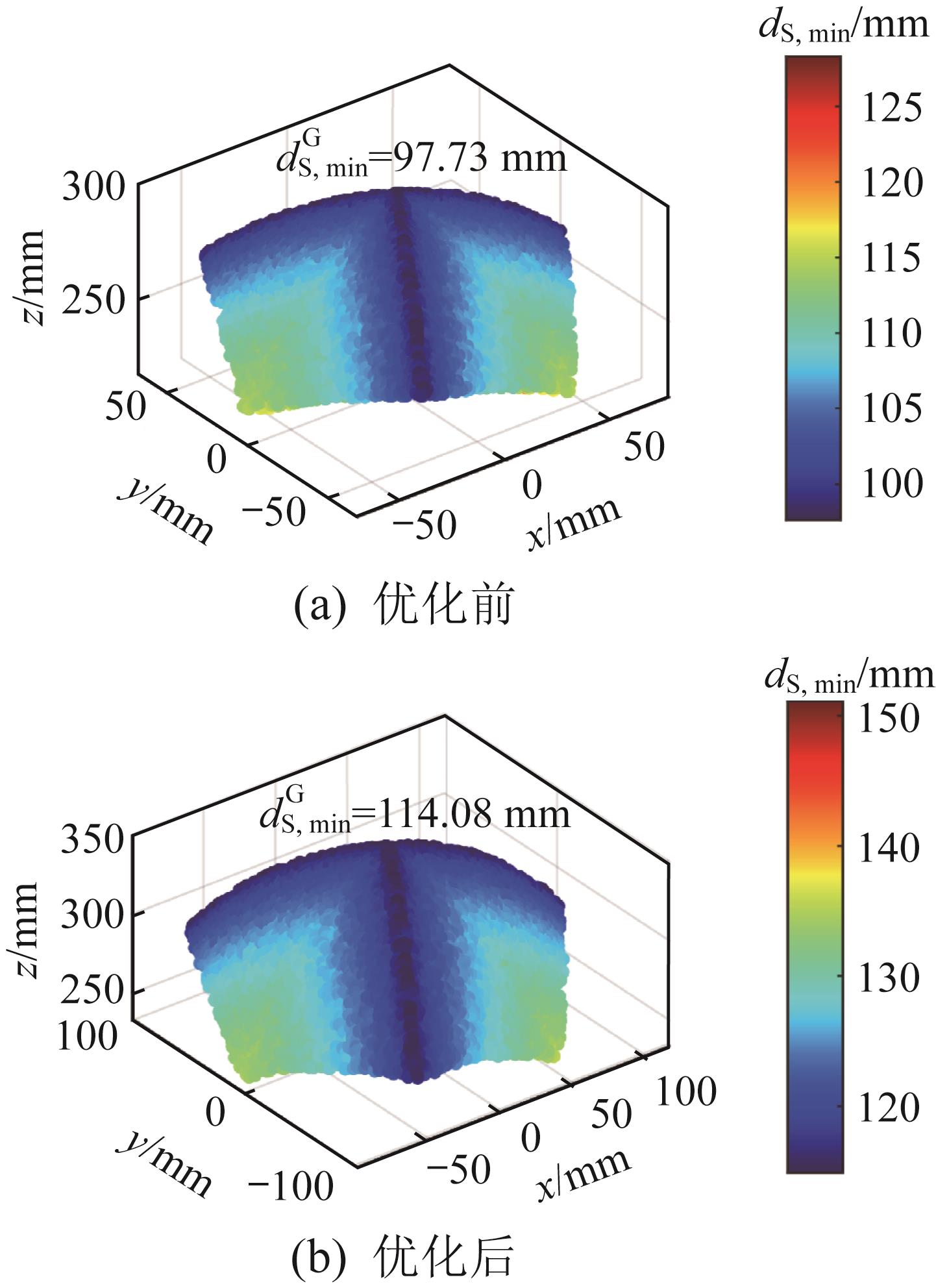
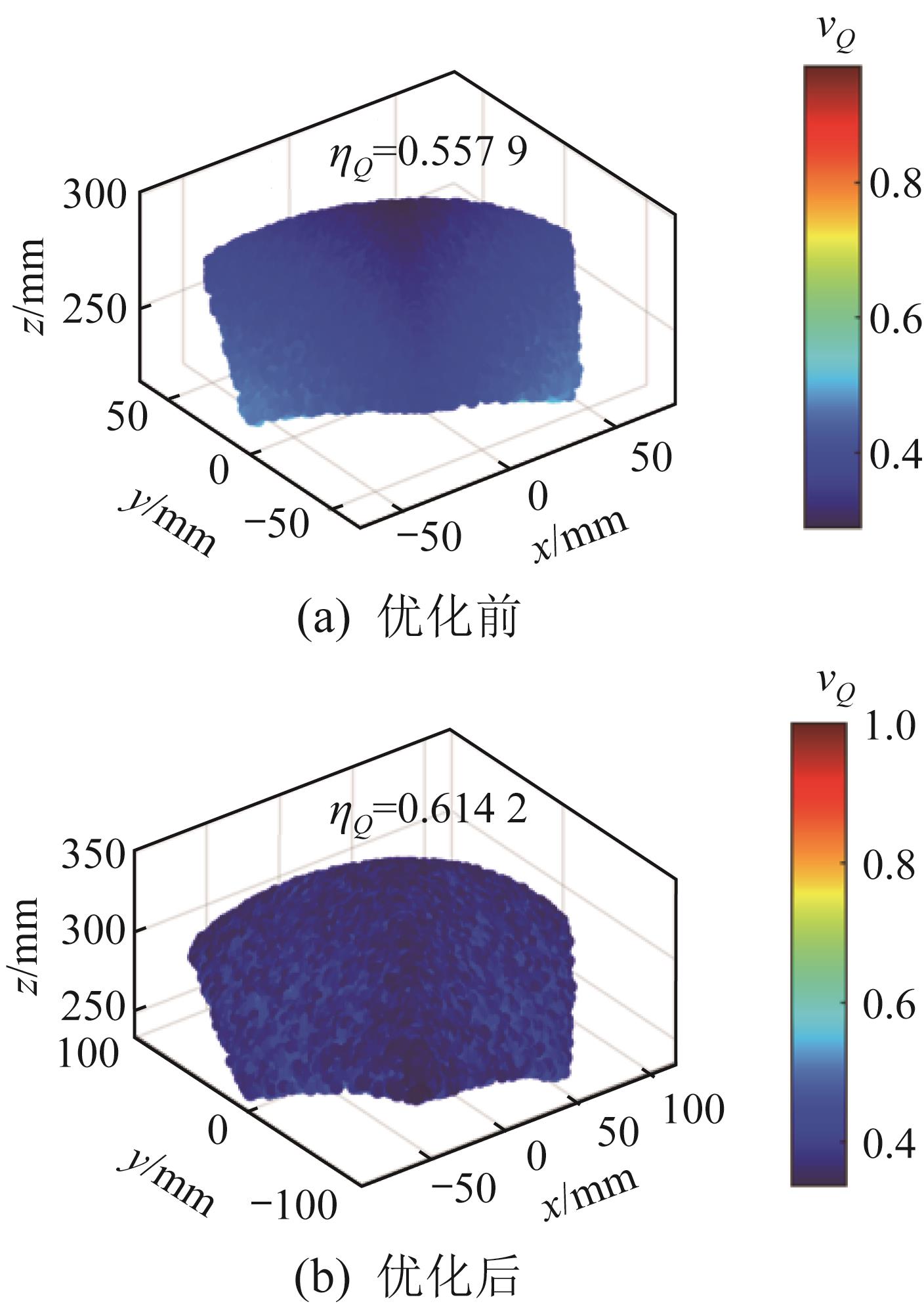
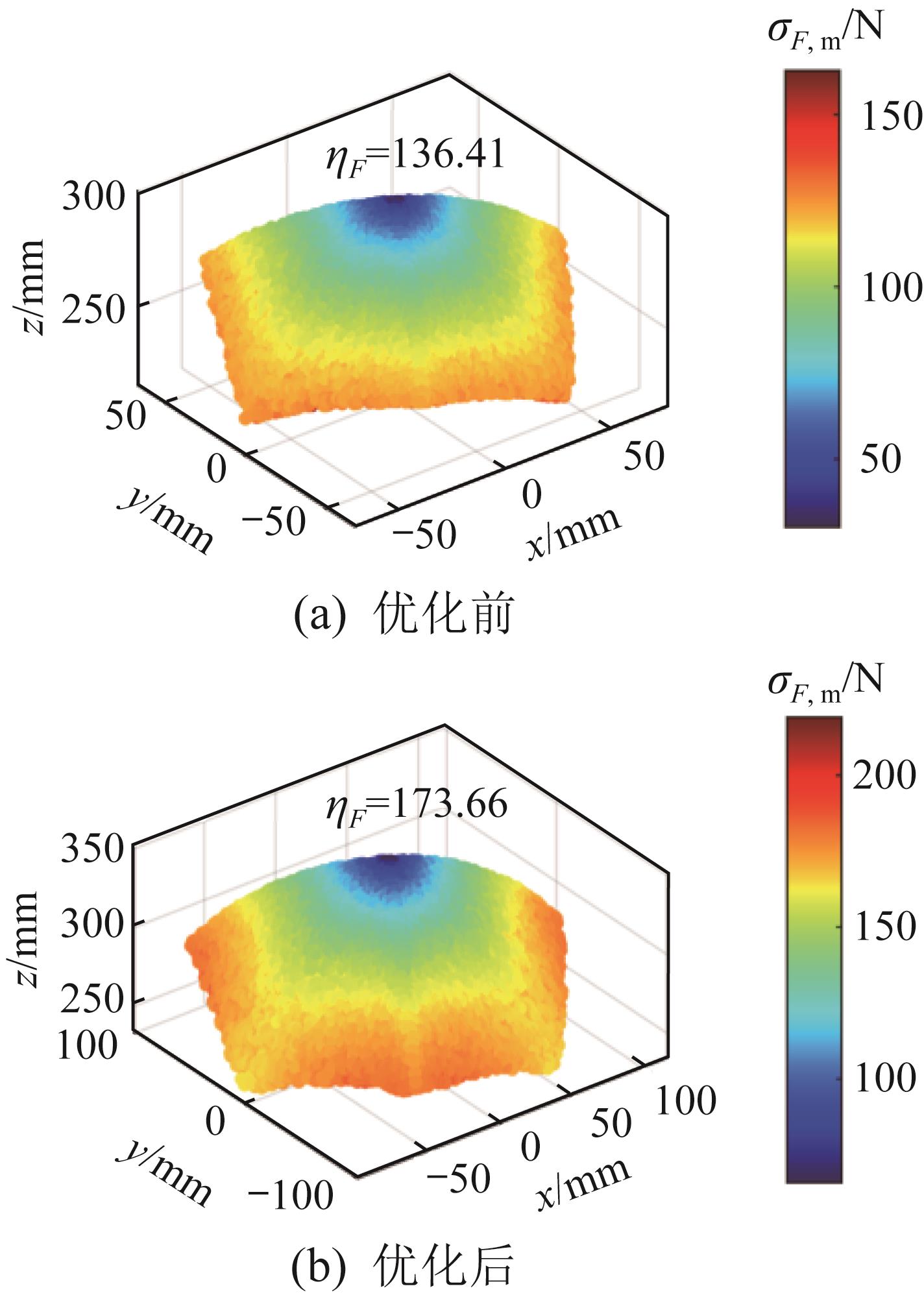
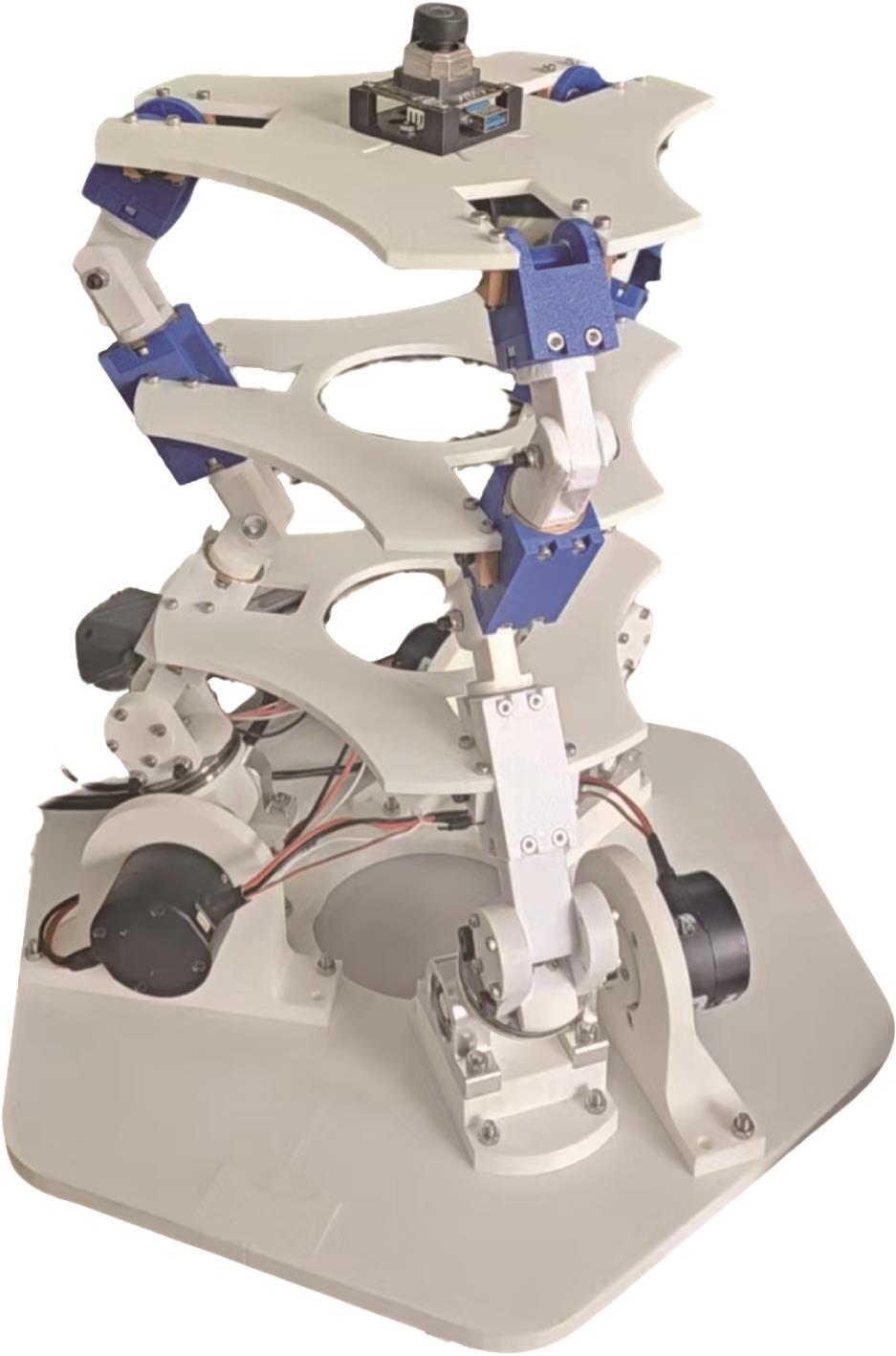
Abstract The multi-segment stacked hybrid mechanism consists of multiple parallel segments connected in series, combining the advantages of serial and parallel configurations. However, such mechanisms feature complex structures and exhibit distinct configurations with different numbers of segments, making it difficult to directly obtain unified kinematic position and velocity solutions valid for any number of segments, thereby hindering their design, analysis and optimization. To solve this problem, the multi-segment stacked hybrid mechanism 3-R1S(RS) N-1R2 is selected as the research object, and its forward kinematics modeling and optimal design are carried out based on the finite and instantaneous screw theory. Firstly, the configuration feature of the hybrid mechanism was described, which achieved multi-segment superimposition through a common motion platform and R joints. Meanwhile, the multi-segment motion superimposition and transmission principle of the mechanism was derived using the finite and instantaneous screw theory. Then, the forward kinematics model of a single segment was deduced. By further extension based on the principle of multi-segment motion superposition and transmission, the unified forward kinematics model and velocity Jacobian matrix valid for any number of segments were obtained, and the correctness of the position and velocity models was verified through simulation. Finally, the optimal number of segments was determined by defining standardized equal-weight performance comparison indicator. The multi-objective optimization was conducted using NSGA-Ⅱ (non-dominated sorting genetic algorithm-II), and the optimal solution was selected from the Pareto frontier by using the entropy-weighted TOPSIS (technique for order preference by similarity to an ideal solution) method. The comparison results before and after optimization indicated that the optimal solution improved significantly in four performance indicators, making the optimized hybrid mechanism more suitable for practical engineering applications. The research results provide new ideas for the analysis and optimization of multi-segment stacked hybrid mechanisms.
|
|
Received: 03 September 2025
Published: 28 April 2026
|
|
|
|
Corresponding Authors:
Yang QI
E-mail: qiyang@tju.edu.cn;1402356217@qq.com
|
多体节叠加型混联机构正运动学建模与优化设计
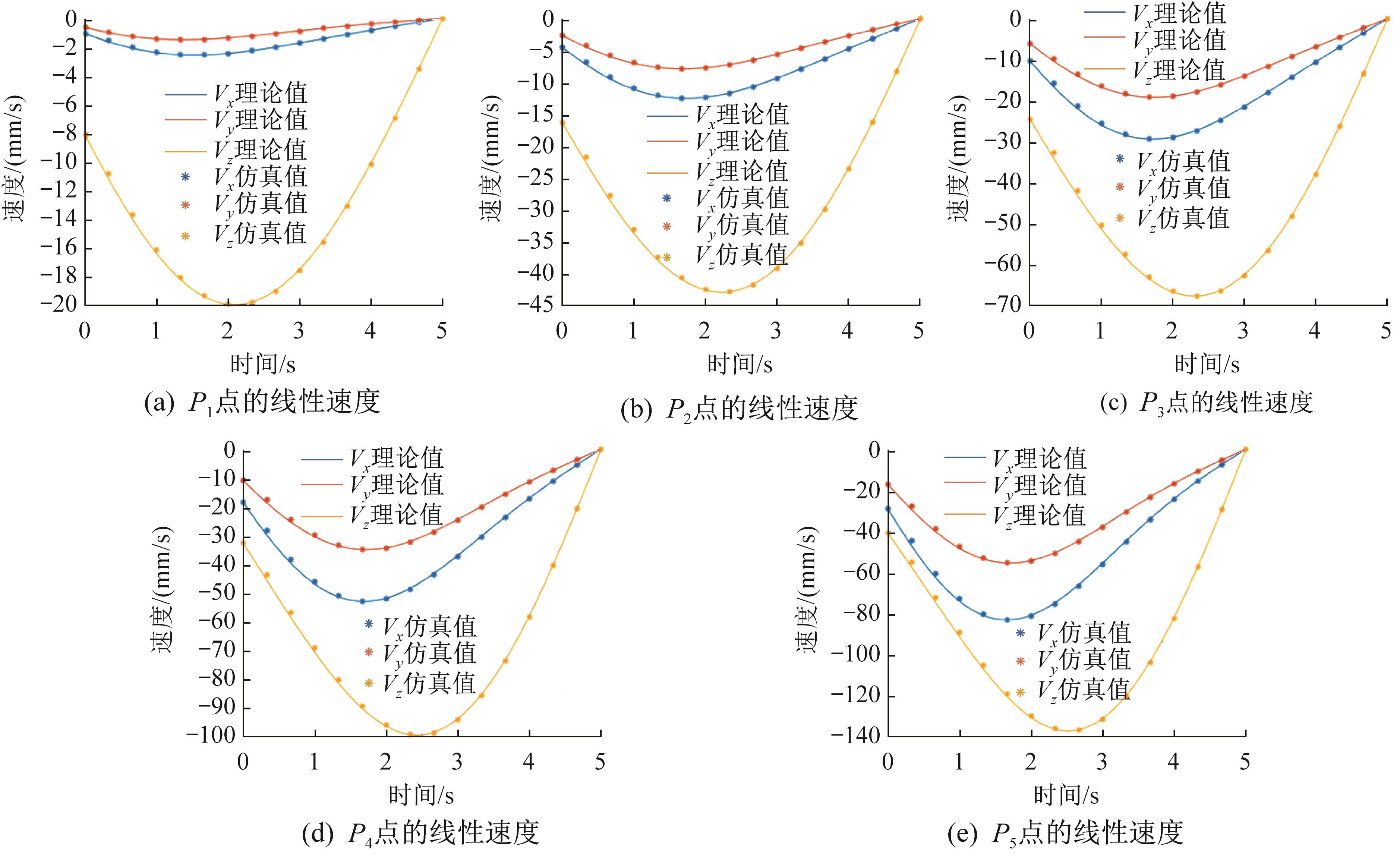
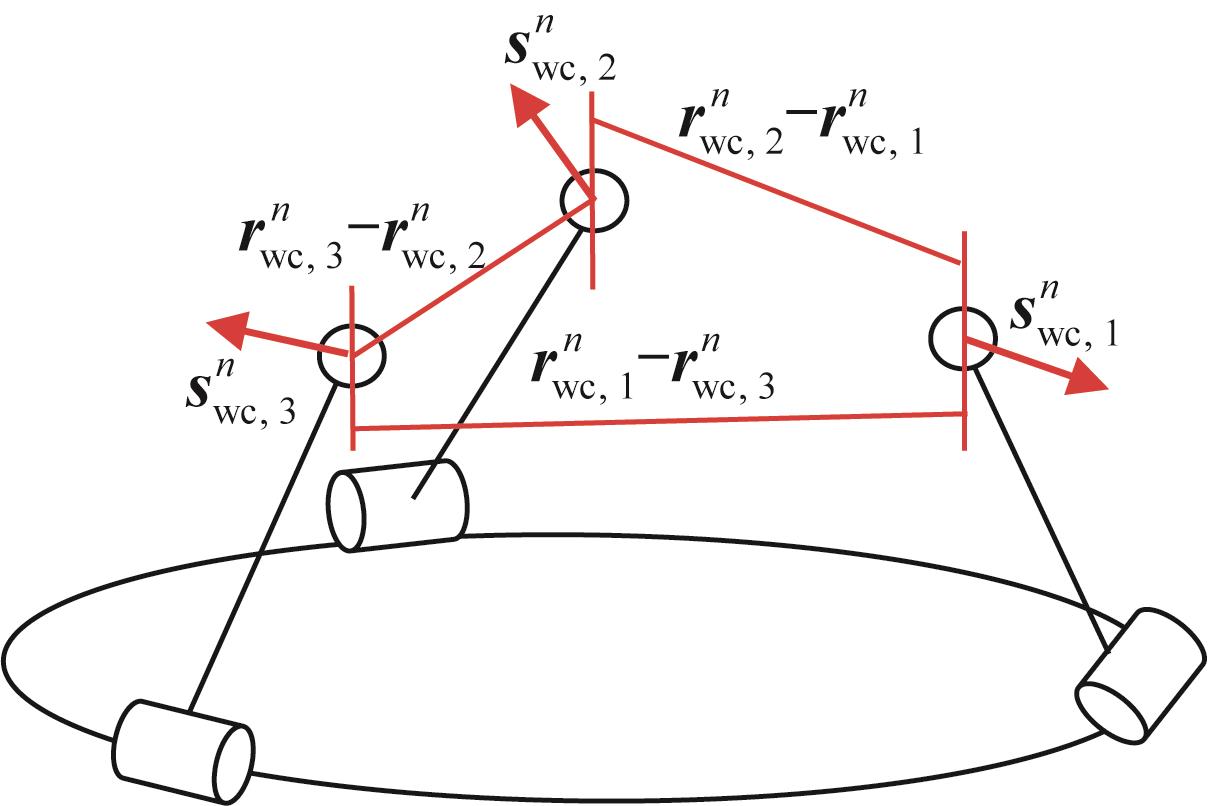
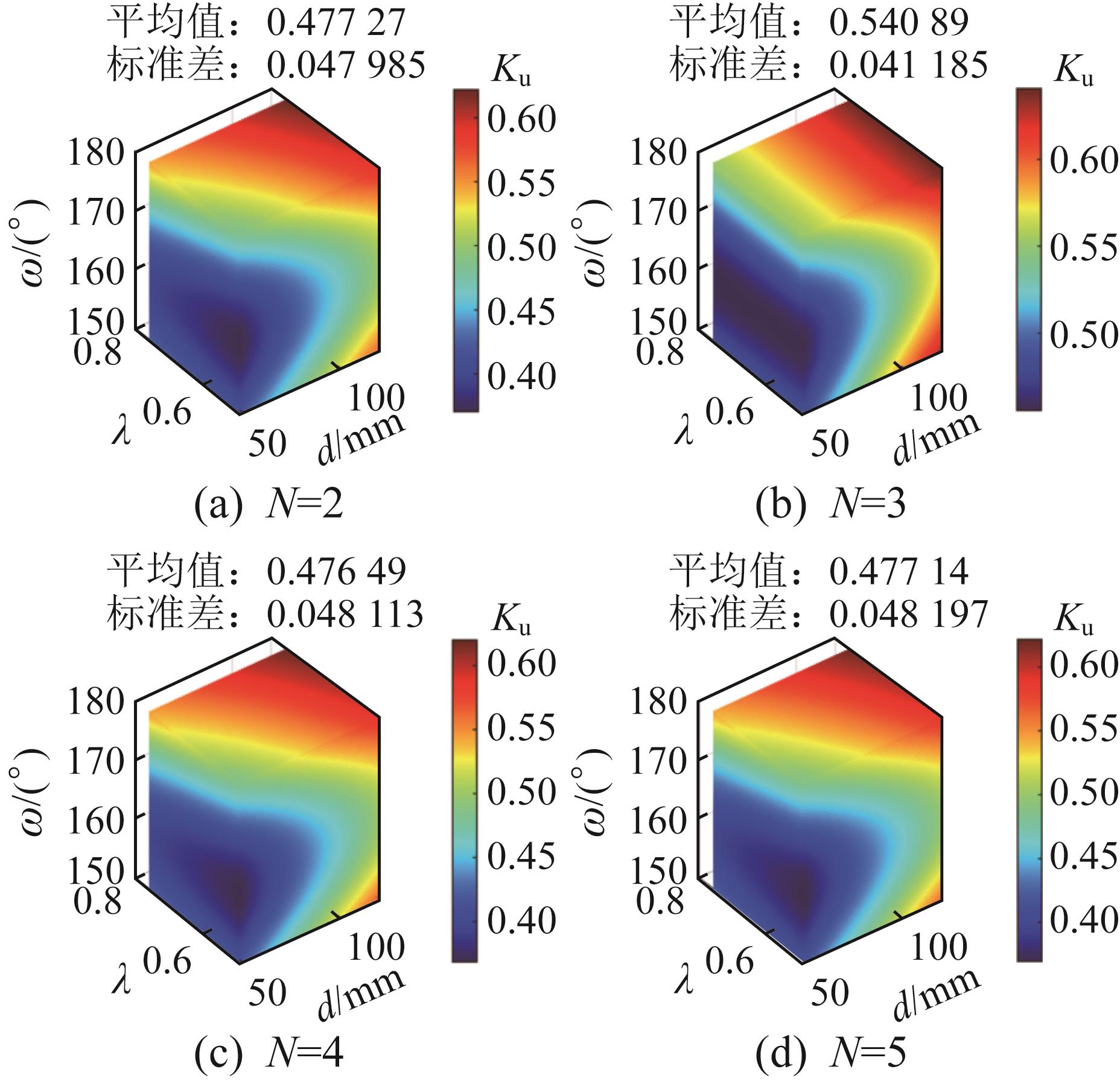
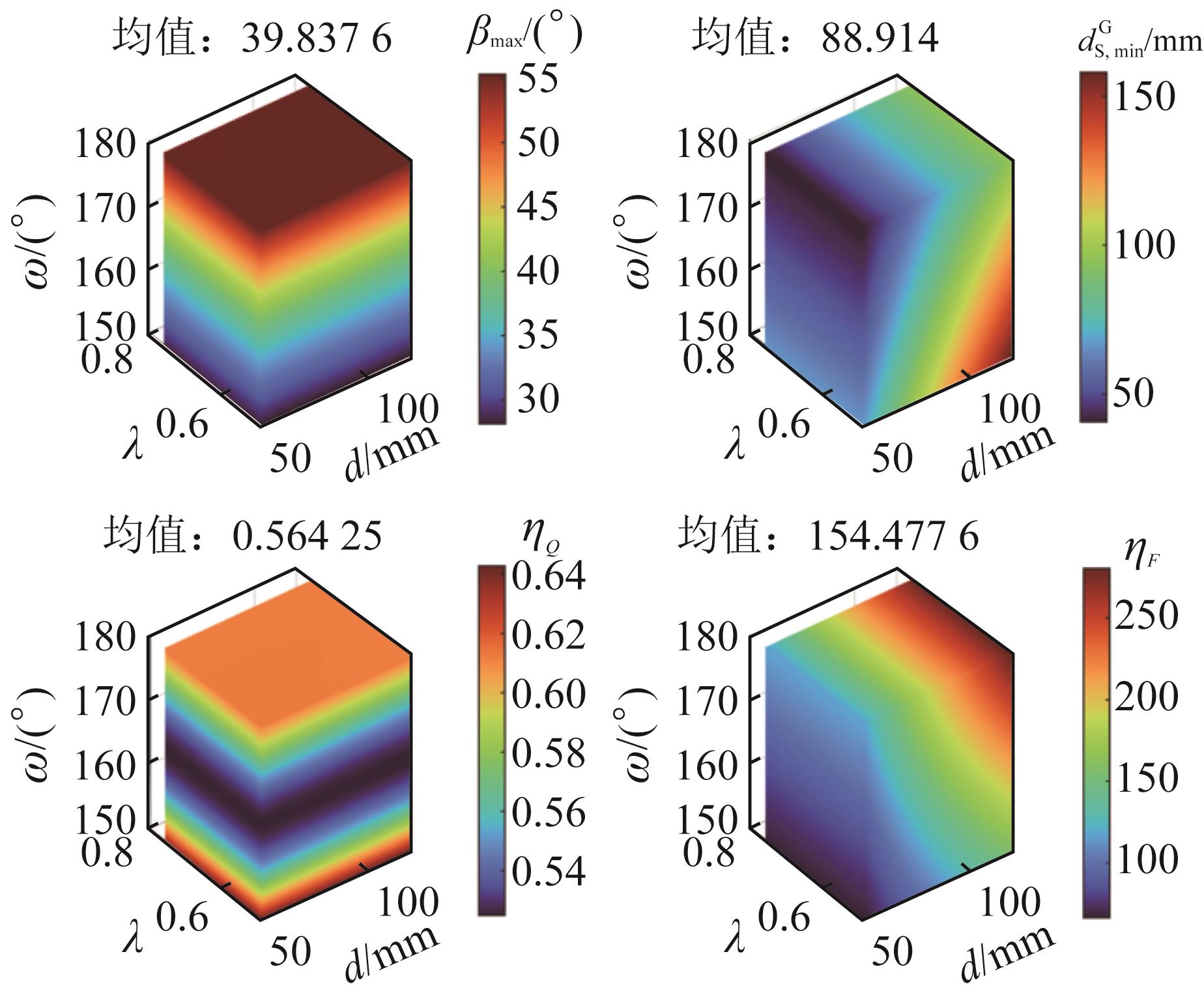
多体节叠加型混联机构由多个并联体节串联叠加构成,同时具备串联和并联两种构型的优点。但这类机构结构复杂,且在体节数不同时呈现出相异构型,难以直接获取任意体节数下均成立的运动学位置解和速度解,从而制约了其设计、分析和优化。为解决这一问题,以多体节叠加型混联机构3-R1S(RS) N-1R2为研究对象,基于有限与瞬时旋量理论对该机构进行了正运动学建模和优化设计。首先,描述了混联机构通过共用运动平台和R关节进行多体节叠加的构型特征,并利用有限与瞬时旋量理论得到了其多体节运动叠加传递原理。然后,推导了单体节的正运动学模型,基于多体节运动叠加传递原理进一步推广,得到了任意体节数下均成立的正运动学模型和速度雅可比矩阵,并通过仿真验证了位置和速度模型的正确性。最后,通过定义标准化等权重的性能对比指标选取了最优体节数,并利用NSGA-Ⅱ(non-dominated sorting genetic algorithm-II,非支配排序遗传算法-Ⅱ)开展多目标优化,通过熵权-逼近理想解排序法从Pareto前沿中选取了最优方案。优化前后的对比结果表明,最优方案在4项性能指标上均得到较大改善,优化后的混联机构更加符合实际工程应用的需求。研究结果为多体节叠加型混联机构的分析和优化提供了新思路。
关键词:
混联机构,
正运动学,
有限与瞬时旋量理论,
优化设计
|
|
| [[1]] |
刘毅, 姚建涛, 郭禹彤, 等. 混联式舱内装配调姿机器人系统设计与分析[J]. 国防科技大学学报, 2025, 47(2): 131-145. doi:10.11887/j.cn.202502012
LIU Y, YAO J T, GUO Y T, et al. Design and analysis of hybrid cabin assembly attitude adjustment robot system[J]. Journal of National University of Defense Technology, 2025, 47(2): 131-145.
doi: 10.11887/j.cn.202502012
|
|
|
| [[2]] |
刘辛军, 谢福贵, 杨迪, 等. 现代科技创新研究模式探讨[J]. 机械工程学报, 2022, 58(11): 1-10. doi:10.3901/JME.2022.11.001
LIU X J, XIE F G, YANG D, et al. Discussion on research mode of advanced scientific and technological innovation[J]. Journal of Mechanical Engineering, 2022, 58(11): 1-10.
doi: 10.3901/JME.2022.11.001
|
|
|
| [[3]] |
张秀丽, 孙国康, 周洪淼, 等. 具有柔性驱动关节的串并混联仿生机械臂[J]. 北京交通大学学报, 2024, 48(6): 154-161.
ZHANG X L, SUN G K, ZHOU H M, et al. A series-parallel hybrid bionic manipulator with flexible driving joints[J]. Journal of Beijing Jiaotong University, 2024, 48(6): 154-161.
|
|
|
| [[4]] |
NEUMANN K E. Tricept application[C]//Proceedings of 3rd Chemnitz Parallel Kinematics Seminar. Zwickau: Verlag Wissenschaftliche Scripten, 2002: 547-551.
|
|
|
| [[5]] |
洪振宇, 梅江平, 赵学满, 等. 可重构混联机械手: TriVariant的误差建模与灵敏度分析[J]. 机械工程学报, 2006, 42(12): 65-69. doi:10.3321/j.issn:0577-6686.2006.12.010
HONG Z Y, MEI J P, ZHAO X M, et al. Error modeling and sensitivity analysis of reconfigurable hybrid robot module TriVariant[J]. Journal of Mechanical Engineering, 2006, 42(12): 65-69.
doi: 10.3321/j.issn:0577-6686.2006.12.010
|
|
|
| [[6]] |
BI Z M, WANG L H. Energy modeling of machine tools for optimization of machine setups[J]. IEEE Transactions on Automation Science and Engineering, 2012, 9(3): 607-613.
|
|
|
| [[7]] |
何雨镐, 谢福贵, 解增辉, 等. 一种五轴并联加工单元的参数与刚度优化设计[J]. 机械工程学报, 2024, 60(13): 308-315.
HE Y H, XIE F G, XIE Z H, et al. Parameters and stiffness optimization of a five-axis parallel machining unit[J]. Journal of Mechanical Engineering, 2024, 60(13): 308-315.
|
|
|
| [[8]] |
胡波, 宋春晓, 王安东, 等. n(3-RPS)混联机构静力学和刚度模型[J]. 燕山大学学报, 2015, 39(5): 408-413. doi:10.3969/j.issn.1007-791X.2015.05.004
HU B, SONG C X, WANG A D, et al. Statics and stiffness model of n(3-RPS) serial-parallel manipulators[J]. Journal of Yanshan University, 2015, 39(5): 408-413.
doi: 10.3969/j.issn.1007-791X.2015.05.004
|
|
|
| [[9]] |
牟德君, 陈先岭, 常雪龙, 等. (2-UPU+SPR)+(2-UPU+RPS)非对称混联机构末端约束及自由度分析[J]. 机械工程学报, 2024, 60(17): 272-282.
MU D J, CHEN X L, CHANG X L, et al. Analysis of terminal constraints and DOF of (2-UPU+SPR)+(2-UPU+RPS) asymmetric hybrid manipulator[J]. Journal of Mechanical Engineering, 2024, 60(17): 272-282.
|
|
|
| [[10]] |
胡波, 张达, 高俊林, 等. 基于共形几何代数求解(4SPS+SPR)+(2RPS+SPR)串并联机构位置正解[J]. 机械工程学报, 2021, 57(13): 102-113. doi:10.3901/JME.2021.13.102
HU B, ZHANG D, GAO J L, et al. CGA-based approach to solve the forward position solution of the (4SPS+SPR)+(2RPS+SPR) serial-parallel manipulator[J]. Journal of Mechanical Engineering, 2021, 57(13): 102-113.
doi: 10.3901/JME.2021.13.102
|
|
|
| [[11]] |
胡波, 冯苗苗, 赵金君, 等. 少驱动多层耦合混联机构: CN115648184B[P]. 2024-12-27.
HU B, FENG M M, ZHAO J J, et al. Reduced drive multi-layer coupled hybrid mechanism: CN115648184B[P]. 2024-12-27.
|
|
|
| [[12]] |
隋峻浩, 赵宏哲, 杨浩, 等. 仿蜜蜂蜂腰结构的变体机构设计与实验[J]. 机械工程学报, 2025, 61(17): 105-113. doi:10.3901/jme.2025.17.105
SUI J H, ZHAO H Z, YANG H, et al. Research and experiment of a modified honeybee abdomen mechanism[J]. Journal of Mechanical Engineering, 2025, 61(17): 105-113.
doi: 10.3901/jme.2025.17.105
|
|
|
| [[13]] |
HUANG Z, LI Q C. Type synthesis of symmetrical lower-mobility parallel mechanisms using the constraint-synthesis method[J]. The International Journal of Robotics Research, 2003, 22(1): 59-79.
|
|
|
| [[14]] |
HE J, GAO F, MENG X D, et al. Type synthesis for 4-DOF parallel press mechanism using GF set theory[J]. Chinese Journal of Mechanical Engineering, 2015, 28(4): 851-859.
|
|
|
| [[15]] |
HE L T, FANG H R, ZHANG D. Design of a class of reconfigurable hybrid mechanisms for large complex curved surface machining based on topological graph theory[J]. Mechanism and Machine Theory, 2023, 190: 105461.
|
|
|
| [[16]] |
WEI J, YU B, LIU C L, et al. Grassmann line geometry based configuration synthesis of equivalent UU parallel mechanisms with two virtual center-of-motion[J]. Mechanism and Machine Theory, 2023, 181: 105208.
|
|
|
| [[17]] |
LIAN B B, SUN T, SONG Y M, et al. Stiffness analysis and experiment of a novel 5-DOF parallel kinematic machine considering gravitational effects[J]. International Journal of Machine Tools and Manufacture, 2015, 95: 82-96.
|
|
|
| [[18]] |
SUN T, ZHAI Y P, SONG Y M, et al. Kinematic calibration of a 3-DOF rotational parallel manipulator using laser tracker[J]. Robotics and Computer-Integrated Manufacturing, 2016, 41: 78-91.
|
|
|
| [[19]] |
SUN T, LIAN B B, YANG S F, et al. Kinematic calibration of serial and parallel robots based on finite and instantaneous screw theory[J]. IEEE Transactions on Robotics, 2020, 36(3): 816-834.
|
|
|
| [[20]] |
SUN T, LIAN B B. Stiffness and mass optimization of parallel kinematic machine[J]. Mechanism and Machine Theory, 2018, 120: 73-88.
|
|
|
| [[21]] |
SUN T, YANG S F, HUANG T, et al. A finite and instantaneous screw based approach for topology design and kinematic analysis of 5-axis parallel kinematic machines[J]. Chinese Journal of Mechanical Engineering, 2018, 31(1): 44.
|
|
|
| [[22]] |
SUN T, YANG S F, HUANG T, et al. A way of relating instantaneous and finite screws based on the screw triangle product[J]. Mechanism and Machine Theory, 2017, 108: 75-82.
|
|
|
| [[23]] |
SUN T, YANG S F, LIAN B B. Finite and instantaneous screw theory in robotic mechanism[M]. Singapore: Springer, 2020.
|
|
|
| [[24]] |
HUO X M, LIAN B B, WANG P F, et al. Topology and dimension synchronous optimization of 1T2R parallel robots[J]. Mechanism and Machine Theory, 2023, 187: 105385.
|
|
|
| [[25]] |
CHEN K X, WANG M, HUO X M, et al. Topology and dimension synchronous optimization design of 5-DOF parallel robots for in-situ machining of large-scale steel components[J]. Mechanism and Machine Theory, 2023, 179: 105105.
|
|
|
| [[26]] |
郭瑞峰, 连宾宾, 宋轶民, 等. 基于FIS理论的Myard环形组网机构运动学分析[J]. 机械工程学报, 2020, 56(19): 132-142. doi:10.3901/JME.2020.19.132
GUO R F, LIAN B B, SONG Y M, et al. Kinematic analysis of Myard circular network based on FIS theory[J]. Journal of Mechanical Engineering, 2020, 56(19): 132-142.
doi: 10.3901/JME.2020.19.132
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|