| Mechanical parts and equipment design |
|

|
|
|
| Design and experimental verification of variable stiffness joint based on axial magnetic coupling |
Junjia WANG( ),Tingcong XIE,Jintao XU,Long HUANG() ),Tingcong XIE,Jintao XU,Long HUANG() |
| College of Mechanical and Vehicle Engineering, Changsha University of Science & Technology, Changsha 410114, China |
|
|
|
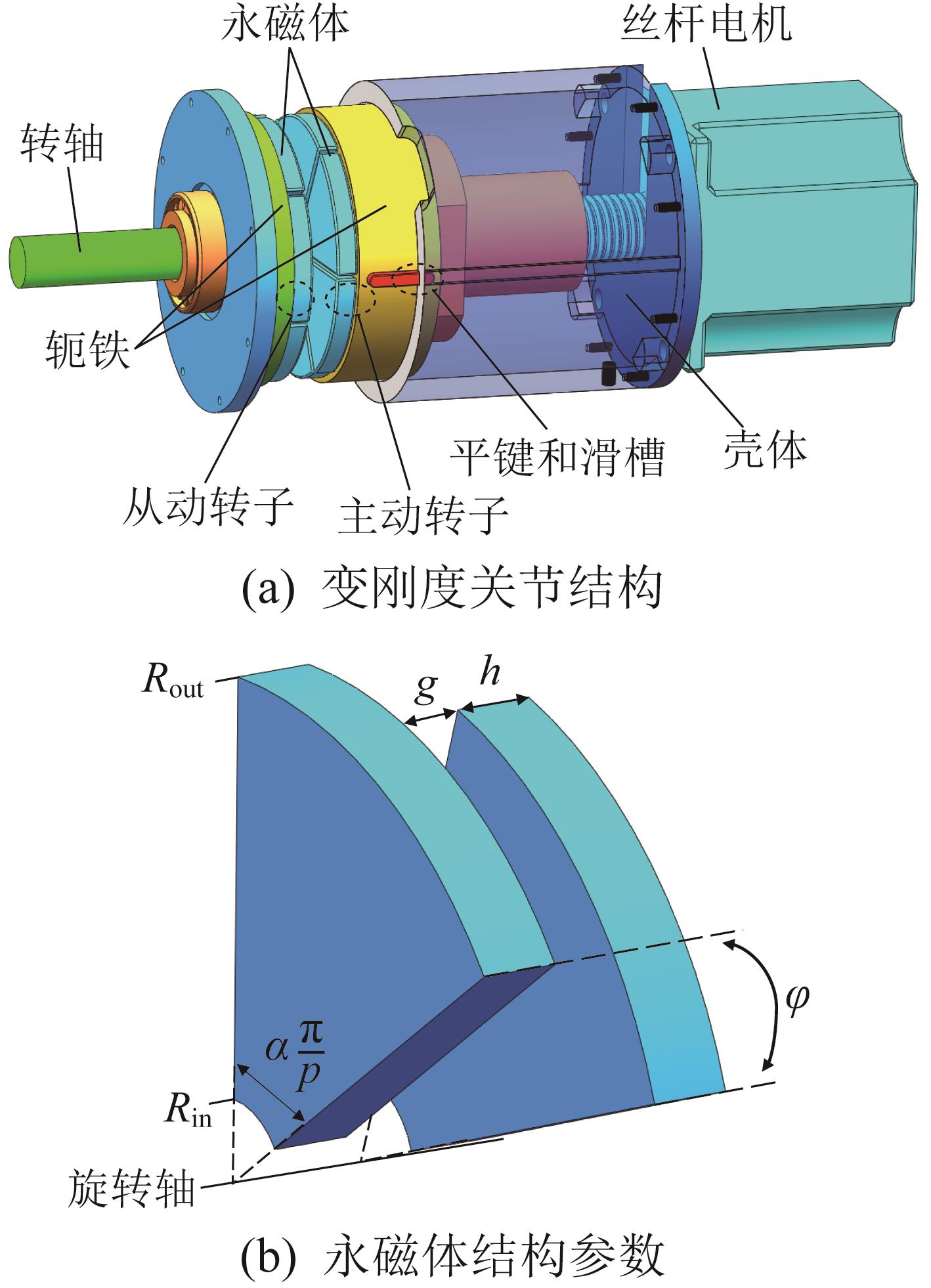
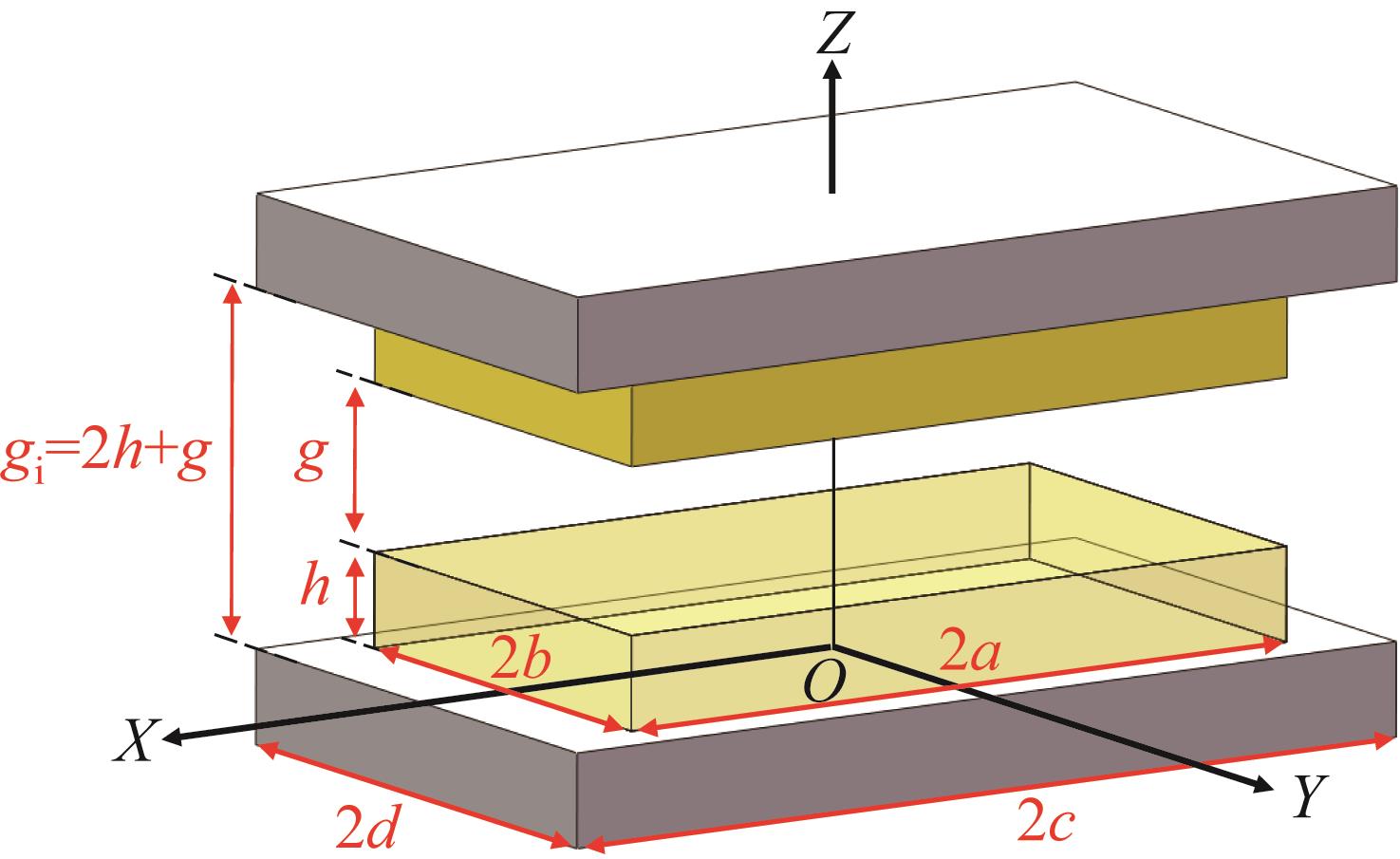
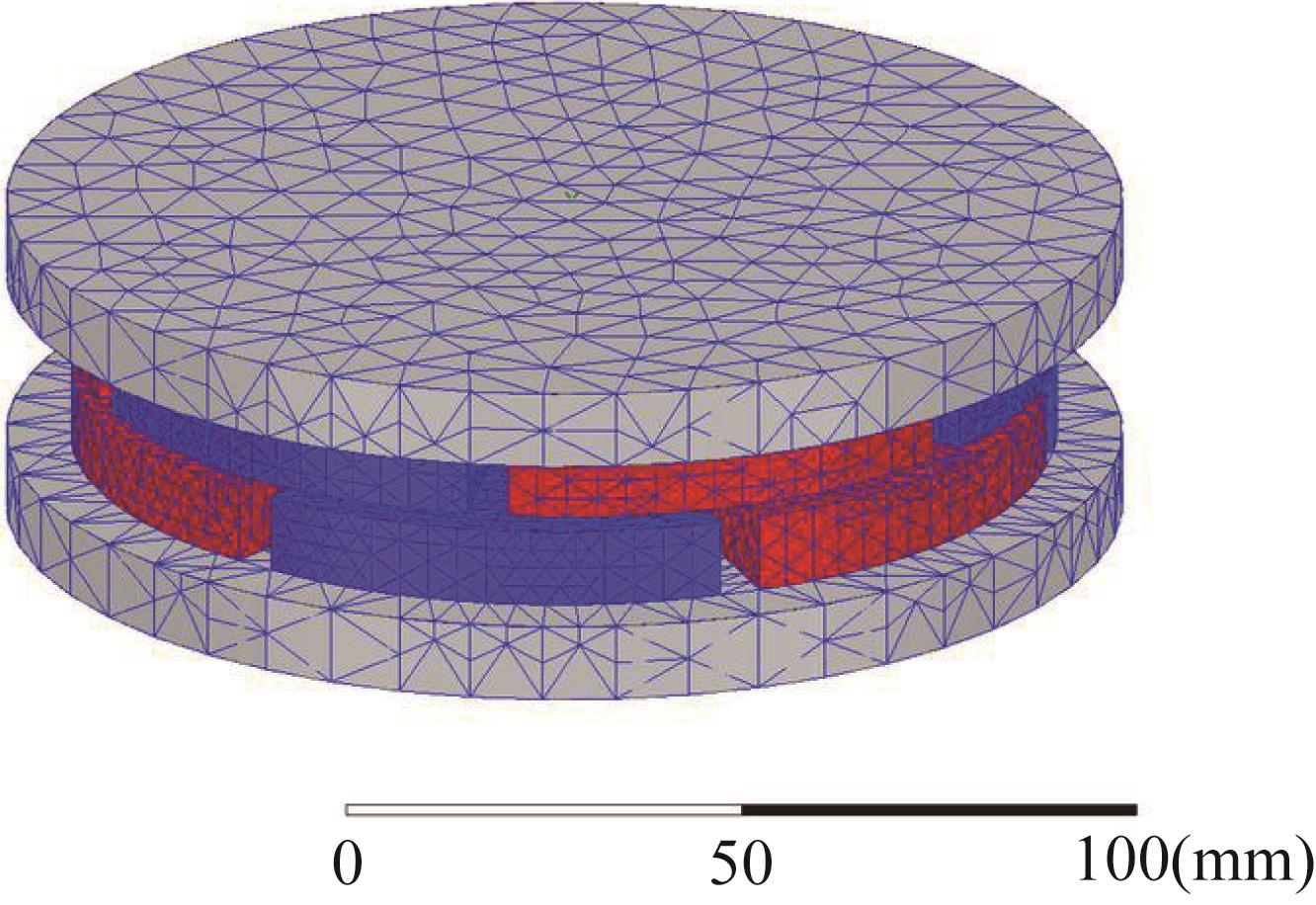
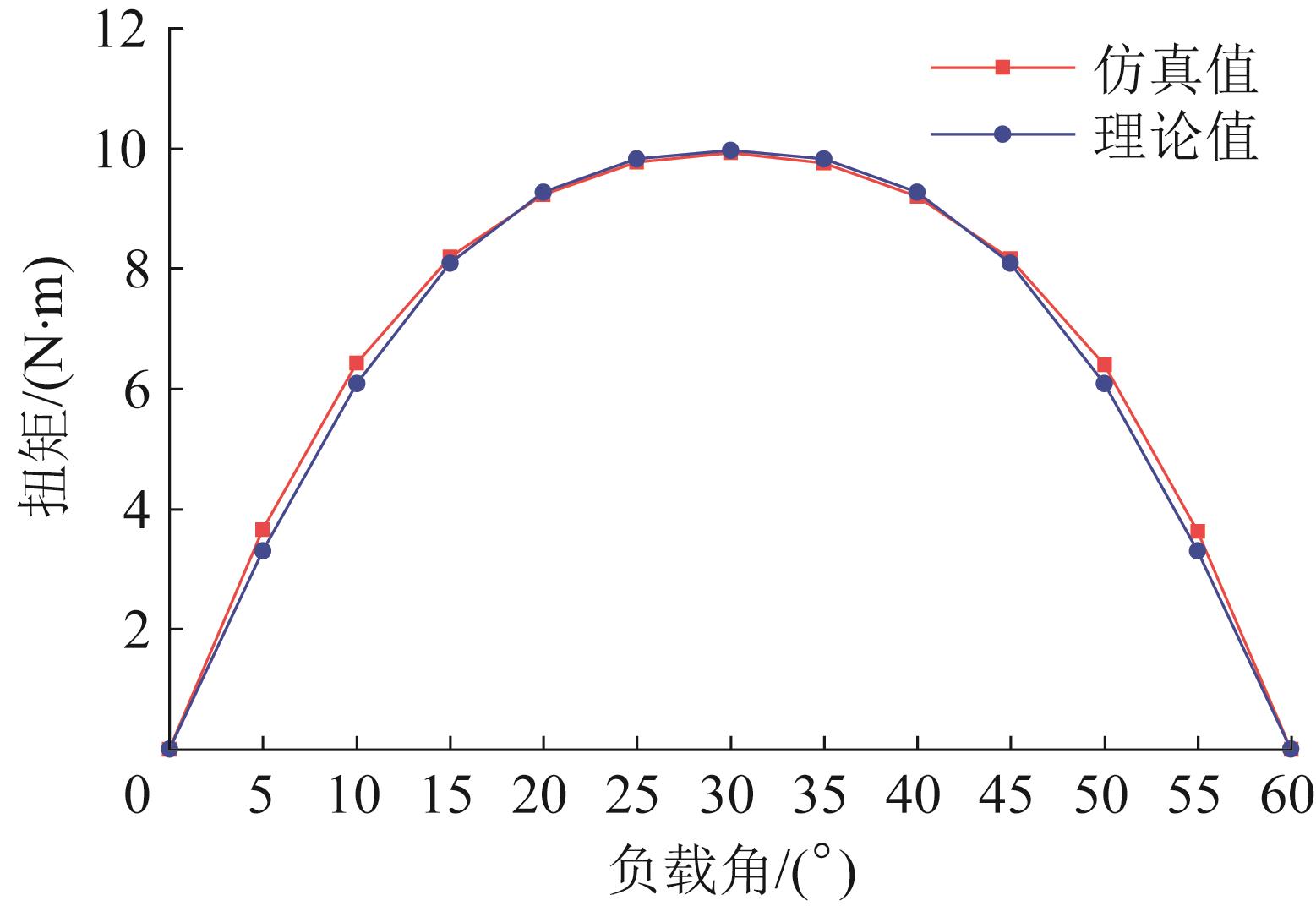
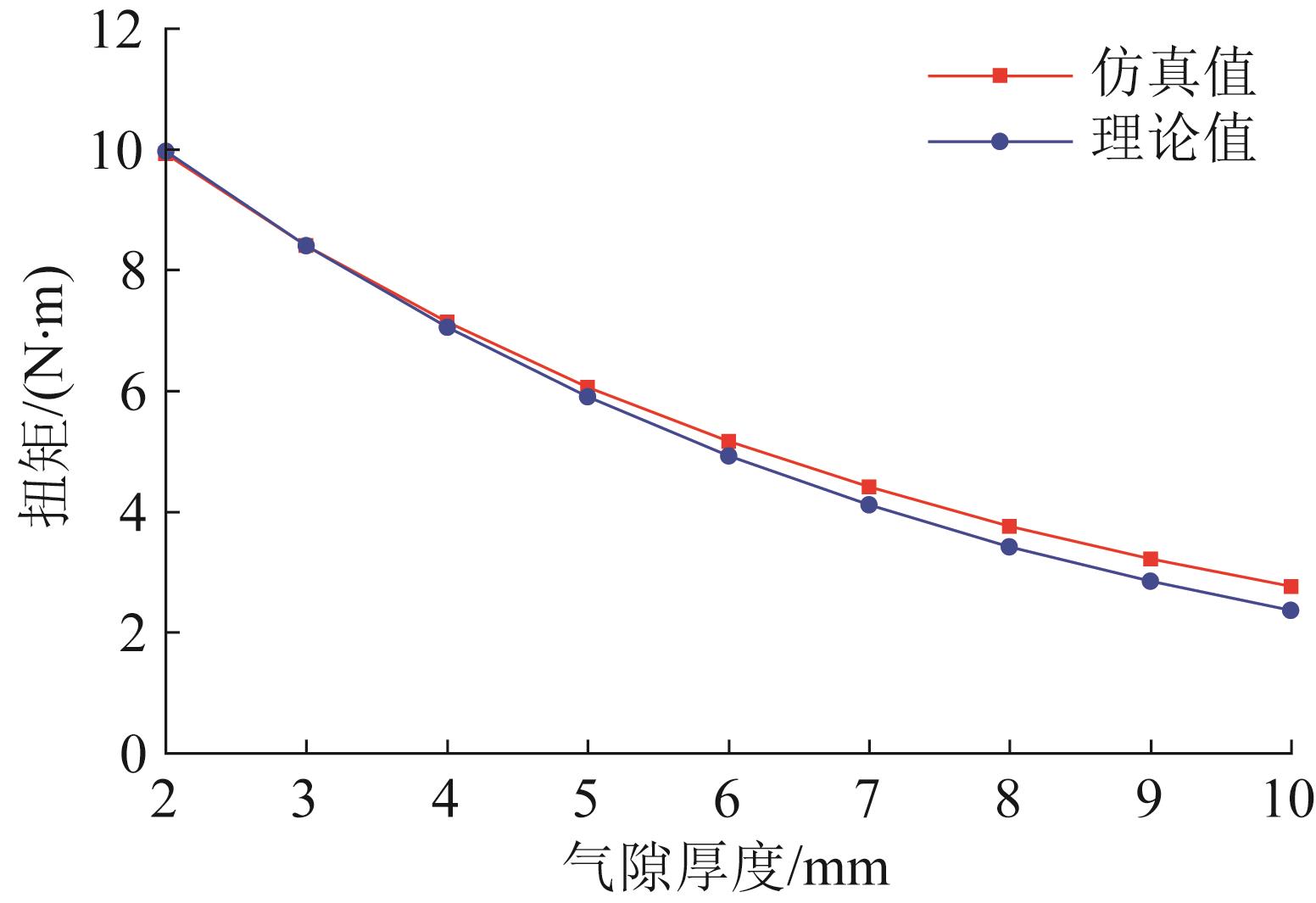
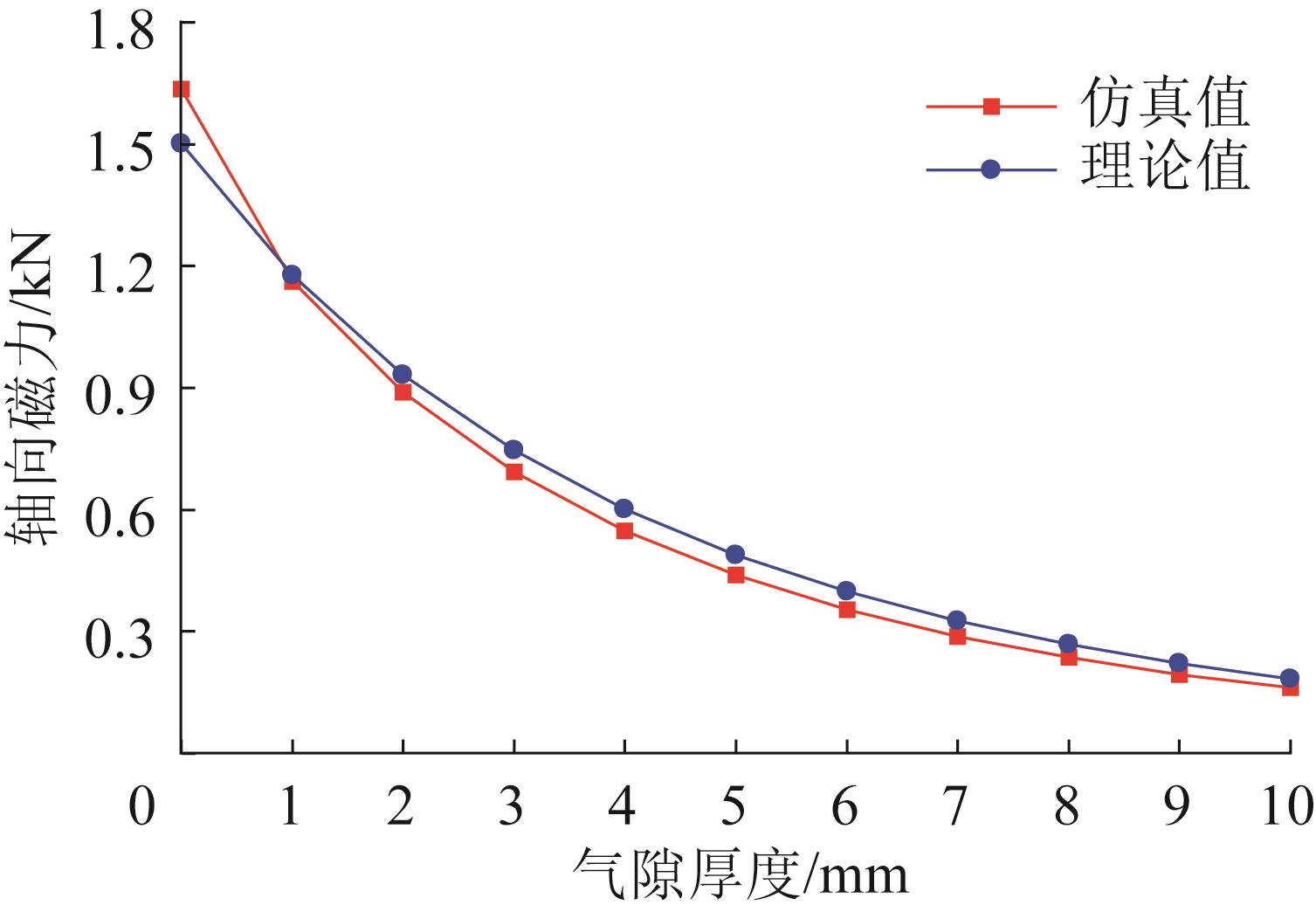
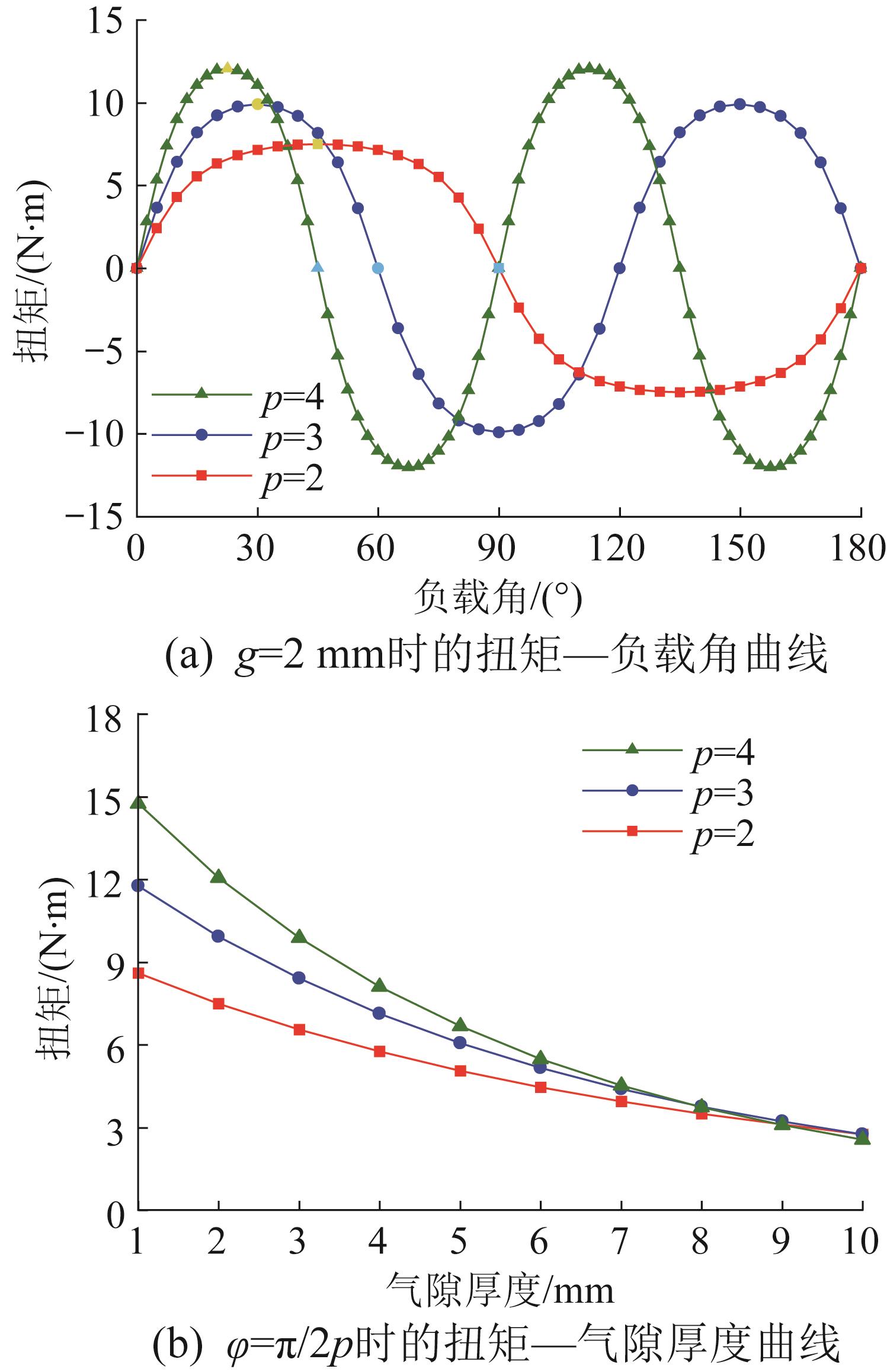
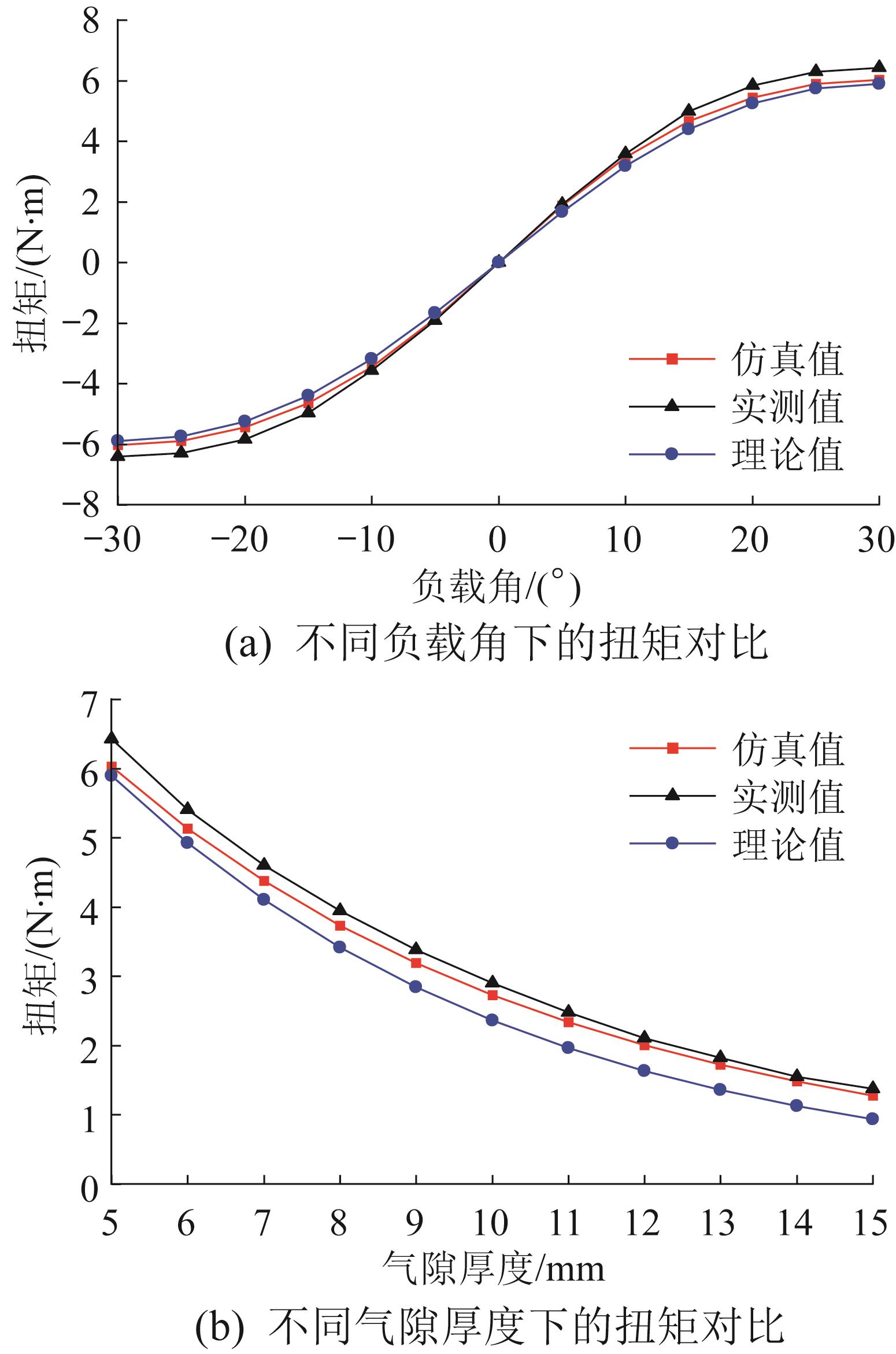
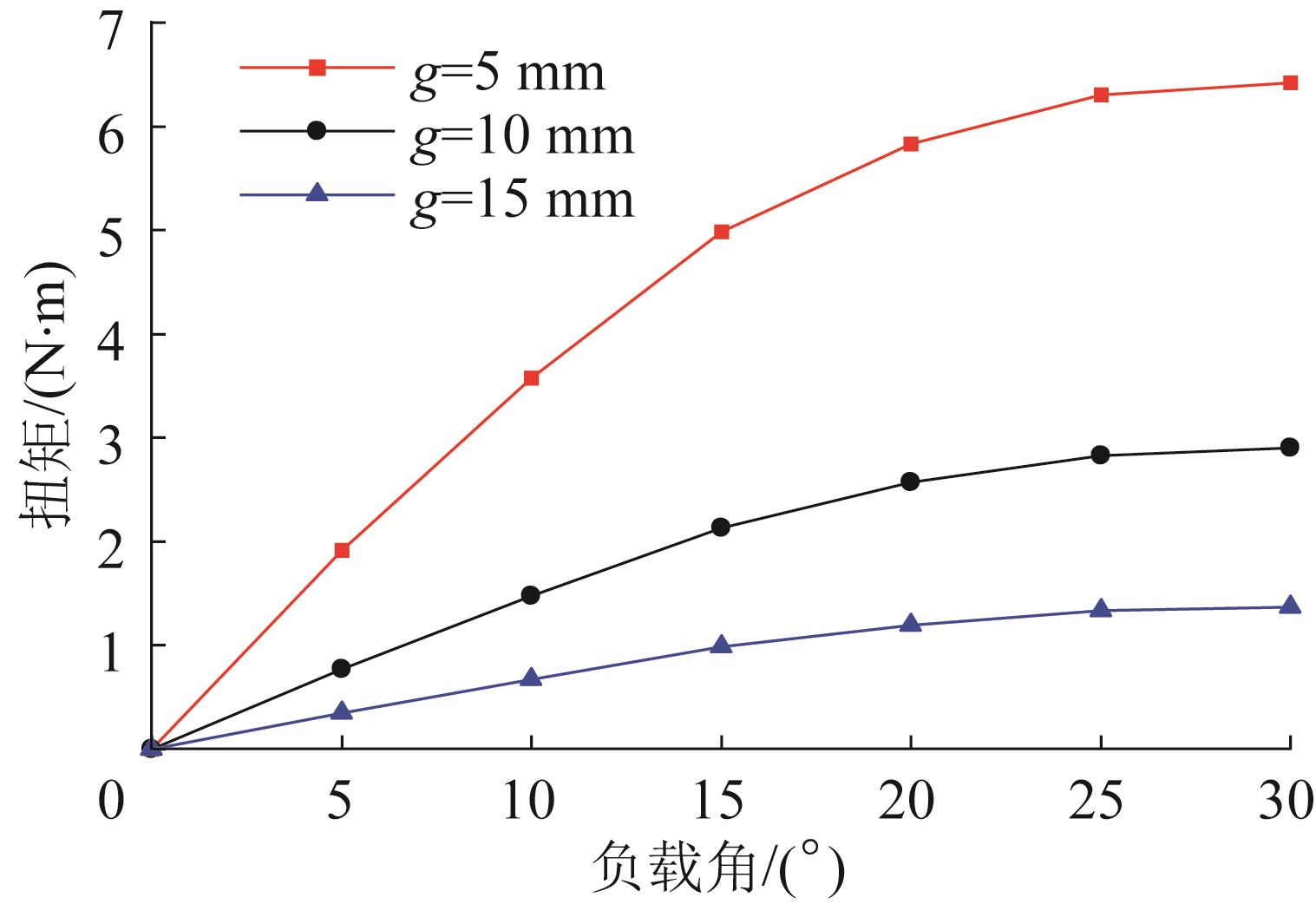
Abstract To address the issue of low transmission torque in radial magnetic coupling variable stiffness joints, a variable stiffness joint based on axial magnetic coupling is designed. Firstly, based on a simplified magnetic pole unit model, an analytical formula for magnetic coupling torque was established to conduct the preliminary design of permanent magnet dimensions. Then, a three-dimensional simulation model of the permanent magnet and the yoke iron was established using Maxwell software, and the torque and axial magnetic force characteristics were analyzed by scanning load angle, air gap thickness, and changing the number of magnetic pole pairs. Finally, a variable stiffness joint prototype was fabricated using permanent magnets with appropriate structural parameters, and an experimental system was established. The torque and variable stiffness performance of the prototype were tested to validate the effectiveness of its design. The results showed that when the air gap thickness was less than 10 mm, the theoretical model and the simulation model were relatively consistent in the torque prediction, with a maximum relative error of 11.6%, while the maximum relative error of axial magnetic force was 13.7%. Increasing the number of magnetic pole pairs could significantly enhance the joint torque, but it would reduce the rotation range of the joint. In addition, due to the increase in leakage flux, the decay rate of the joint torque became faster as the air gap thickness increased. Experimental tests showed that the designed variable stiffness joint prototype achieved a torque transmission of 6.43 N·m and an active stiffness adjustment range exceeding five-fold, with a relative error between the actual operating data and the simulation results within 7.8%. The proposed method can provide theoretical support for the optimization design of axial magnetic coupling variable stiffness joints.
|
|
Received: 14 March 2025
Published: 01 March 2026
|
|
|
|
Corresponding Authors:
Long HUANG
E-mail: wy2047255396@163.com;huanglongin@foxmail.com
|
基于轴向磁耦合的变刚度关节设计与实验验证
针对径向磁耦合变刚度关节传输扭矩较低的问题,设计了一种基于轴向磁耦合的变刚度关节。首先,基于简化的磁极单元模型建立磁耦合扭矩解析公式,对永磁体的尺寸进行初步设计。然后,使用Maxwell软件建立永磁体和轭铁的三维仿真模型,通过扫描负载角、气隙厚度及改变磁极对数等方式,分析扭矩与轴向磁力特性。最后,优选出结构参数合适的永磁体制作变刚度关节样机并搭建实验系统,测试样机的扭矩和变刚度性能,以验证其设计的有效性。结果表明,当气隙厚度低于10 mm时,理论模型与仿真模型在扭矩的预测上较为吻合,最大相对误差为11.6%,而轴向磁力的最大相对误差为13.7%。增加磁极对数可较为显著地提升关节扭矩,但会减小关节所能旋转的角度;此外,由于漏磁量的增加,关节扭矩随气隙厚度增大而衰减的速度变快。经实验测试,所设计的变刚度关节样机能够实现6.43 N·m的扭矩传输和5倍以上的主动刚度调节,实际运行数据与仿真结果的相对误差在7.8%以内。所提出的方法可为轴向磁耦合变刚度关节的优化设计提供理论支持。
关键词:
轴向磁耦合,
永磁体,
变刚度关节,
扭矩传输
|
|
| [[1]] |
潘杰, 于靖军, 裴旭. 柔性手爪机构设计与变刚度技术研究发展综述[J]. 机械工程学报, 2024, 60(13): 281-296. doi:10.3901/jme.2024.13.281
PAN J, YU J J, PEI X. Development of flexible gripper mechanism design and variable stiffness technology research[J]. Journal of Mechanical Engineering, 2024, 60(13): 281-296.
doi: 10.3901/jme.2024.13.281
|
|
|
| [[2]] |
MAO Z Z, WANG C L, RUI Y F, et al. Variable stiffness mechanism for single-joint lower limb wearable exoskeleton: a review[C]//2022 6th International Conference on Automation, Control and Robots. Shanghai, Sep. 23-25, 2022.
|
|
|
| [[3]] |
蒲萌浩, 徐富康, 柴治平, 等. 软体技术在机器人化制造中的应用与展望[J]. 机器人, 2024, 46(2): 158-177.
PU M H, XU F K, CHAI Z P, et al. Application and perspective on soft technologies for robotized manufacturing[J]. Robot, 2024, 46(2): 158-177.
|
|
|
| [[4]] |
SUN H, PARK S, HWANG D. Compact modular robotic wrist with variable stiffness capability[J]. IEEE Transactions on Robotics, 2025, 41: 141-158.
|
|
|
| [[5]] |
HU X Y, LI Y B, WU H Y, et al. A series variable-stiffness joint for robot-assisted resistance training[C]//2024 IEEE/RSJ International Conference on Intelligent Robots and Systems. Abu Dhabi, Oct. 14-18, 2024.
|
|
|
| [[6]] |
KUMAR S, ZWALL M R, BOLÍVAR-NIETO E A, et al. Extremum seeking control for stiffness auto-tuning of a quasi-passive ankle exoskeleton[J]. IEEE Robotics and Automation Letters, 2020, 5(3): 4604-4611.
|
|
|
| [[7]] |
WOLF S, EIBERGER O, HIRZINGER G. The DLR FSJ: energy based design of a variable stiffness joint[C]//2011 IEEE International Conference on Robotics and Automation. Shanghai, May 9-13, 2011.
|
|
|
| [[8]] |
SUN J T, GUO Z, ZHANG Y B, et al. A novel design of serial variable stiffness actuator based on an Archimedean spiral relocation mechanism[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(5): 2121-2131.
|
|
|
| [[9]] |
MILAZZO G, LEMERLE S, GRIOLI G, et al. Design, characterization, and validation of a variable stiffness prosthetic elbow[J]. IEEE Transactions on Robotics, 2025, 41: 82-95.
|
|
|
| [[10]] |
CONTRERAS-CALDERÓN M G, LARIBI M A, ARSICAULT M, et al. Design, analysis, and simulation of a new variable stiffness joint based on antagonist principle[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2022, 236(18): 9991-10000.
|
|
|
| [[11]] |
BAGGETTA M, BERSELLI G, PALLI G, et al. Design, modeling, and control of a variable stiffness elbow joint[J]. The International Journal of Advanced Manufacturing Technology, 2022, 122(11): 4437-4451.
|
|
|
| [[12]] |
HAO Y F, WANG T M, WEN L. A programmable mechanical freedom and variable stiffness soft actuator with low melting point alloy[M]//Intelligent Robotics and Applications. Cham: Springer International Publishing, 2017: 151-161.
|
|
|
| [[13]] |
SUDANO A, ACCOTO D, ZOLLO L, et al. Design, development and scaling analysis of a variable stiffness magnetic torsion spring[J]. International Journal of Advanced Robotic Systems, 2013, 10(10): 372.
|
|
|
| [[14]] |
SHARDYKO I V, KOPYLOV V M, VOLNYAKOV K A. Design, modeling, and control of a variable stiffness joint based on a torsional magnetic spring[J]. Computer Research and Modeling, 2023, 15(5): 1323-1347.
|
|
|
| [[15]] |
ZHANG M, FANG L J, SUN F, et al. Realization of flexible motion of robot joint with a novel permanent magnetic spring[C]//2018 IEEE International Conference on Intelligence and Safety for Robotics. Shenyang, Aug. 24-27, 2018.
|
|
|
| [[16]] |
RAFEEDI F A, YOON J H, HONG D. Design and control of a novel compact nonlinear rotary magnetic SEA (MSEA) for practical robotic gripper implementation[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 7643-7650.
|
|
|
| [[17]] |
CHOI J, PARK S, LEE W, et al. Design of a robot joint with variable stiffness[C]//2008 IEEE International Conference on Robotics and Automation. Pasadena, CA, May 19-23, 2008.
|
|
|
| [[18]] |
DOLISY B, MEZANI S, LUBIN T, et al. A new analytical torque formula for axial field permanent magnets coupling[J]. IEEE Transactions on Energy Conversion, 2015, 30(3): 892-899.
|
|
|
| [[19]] |
LUBIN T, MEZANI S, REZZOUG A. Simple analytical expressions for the force and torque of axial magnetic couplings[J]. IEEE Transactions on Energy Conversion, 2012, 27(2): 536-546.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|