| Robotic and Mechanism Design |
|


|
|
|
| Trajectory tracking control of swimming pool cleaning robot based on improved SMC and ILC |
Jun TANG( ),Hailin XU,Shaowen ZHANG ),Hailin XU,Shaowen ZHANG |
| School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China |
|
|
|
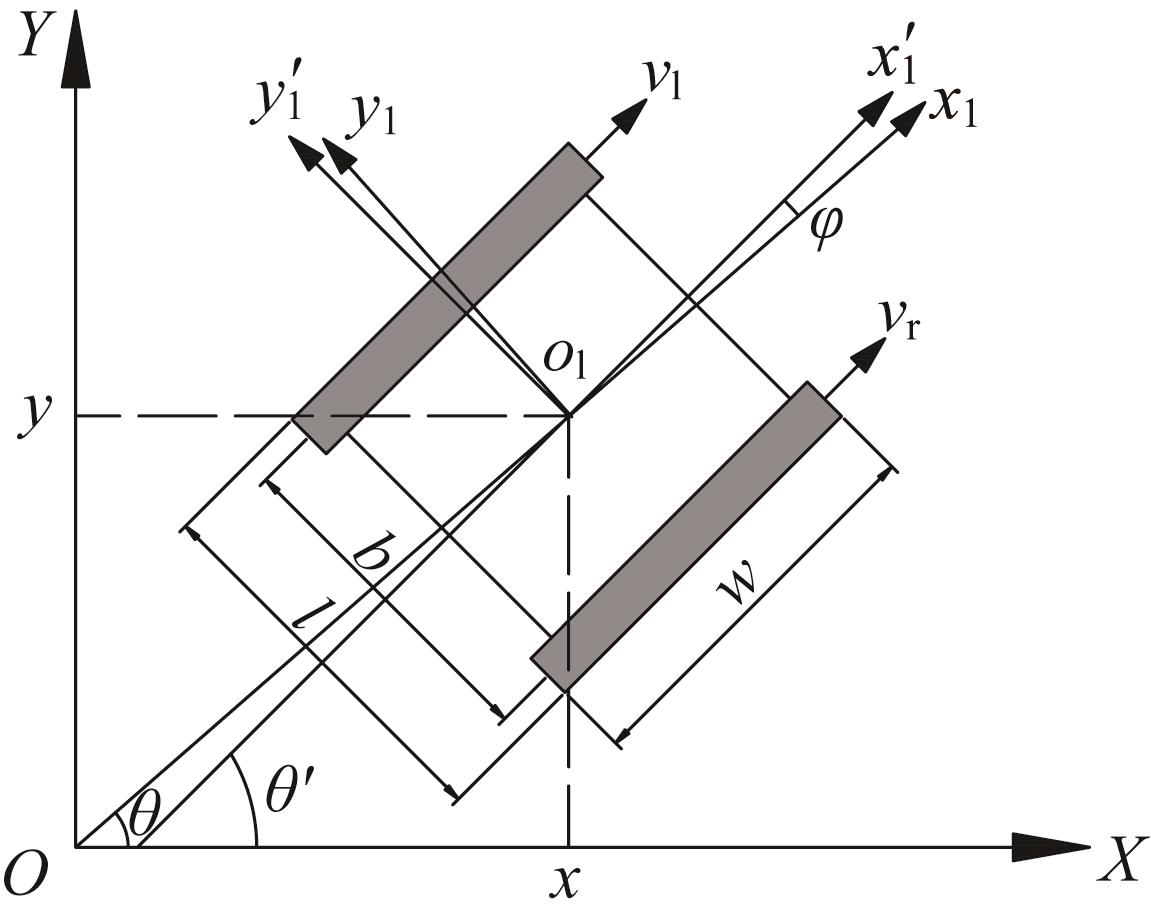
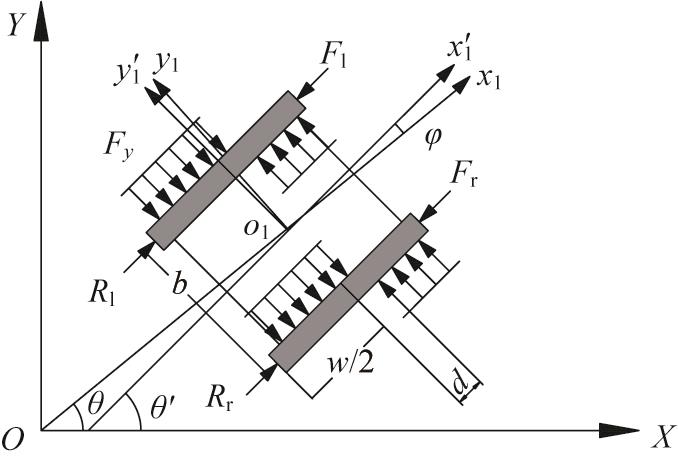
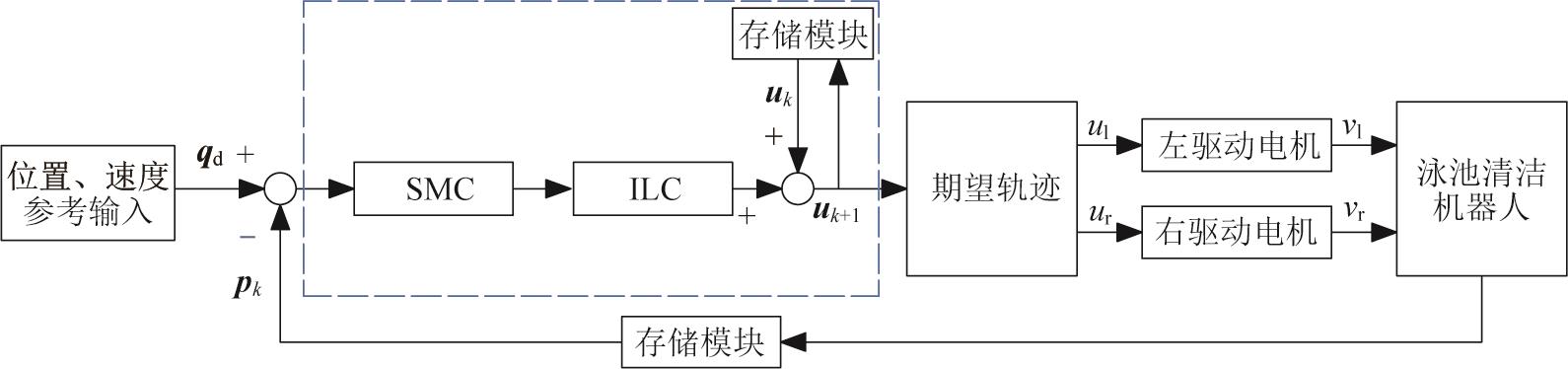
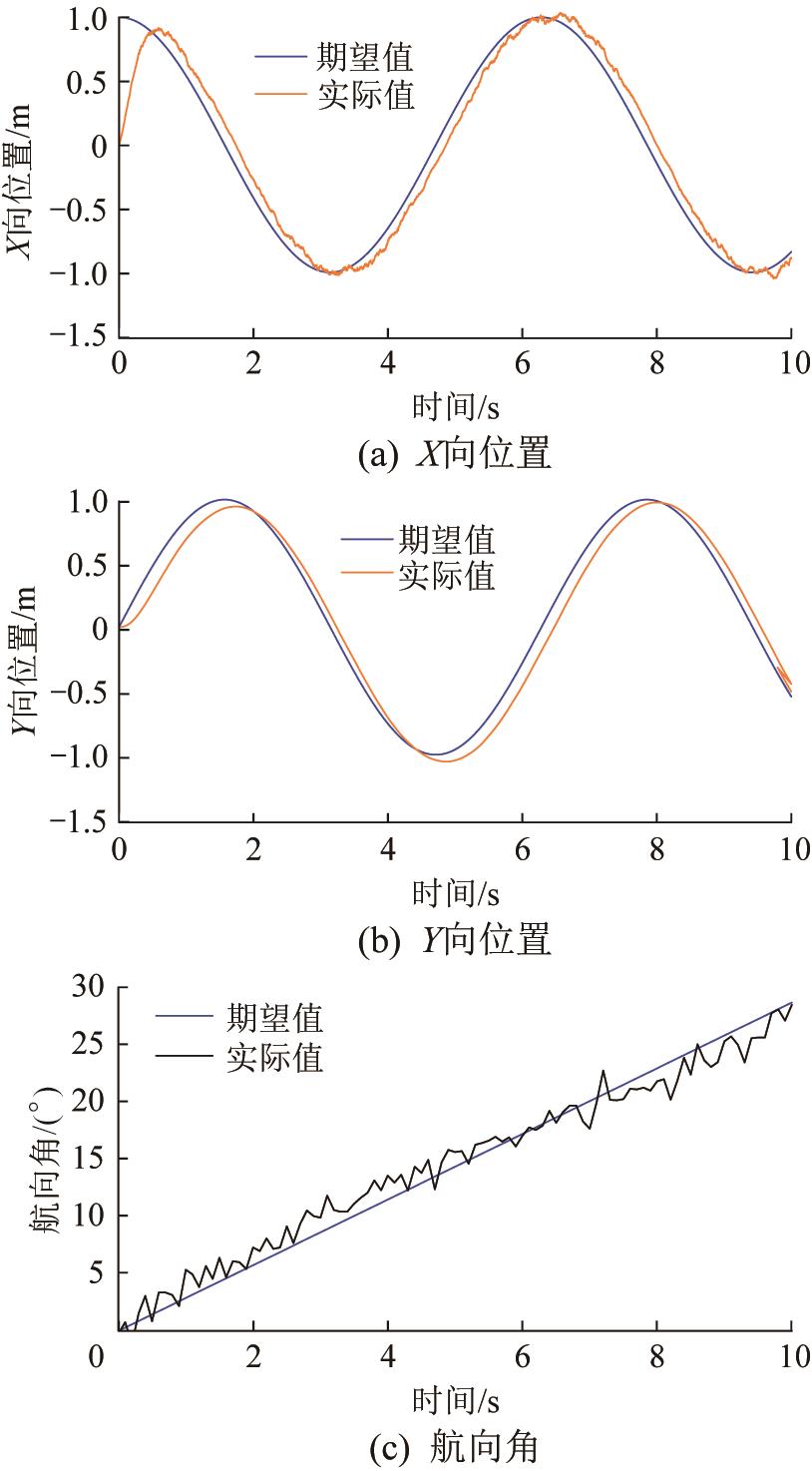
Abstract Aiming at the problem that the swimming pool cleaning robot deviates from the predetermined trajectory due to external interference and steering slip when performing tasks, a trajectory tracking control method based on improved sliding mode control (SMC) and iterative learning control (ILC) is proposed. It aims to improve the trajectory tracking accuracy of robots under slip interference. Firstly, the kinematics and dynamics models of the robot were established, and slip parameters were introduced to characterize the influence of slip interference. Then, the robustness of the robot control system was enhanced by combining SMC, and a nonlinear integral sliding mode surface adapted to slip interference was designed. Meanwhile, the ILC was used to further improve the trajectory tracking accuracy. Finally, by using the PD (proportional-derivative) type closed-loop ILC control law as the feedback, the stability and convergence of the designed nonlinear integral SMC-ILC controller in the presence of slip interference were proved through theoretical analysis. The simulation results showed that compared with the traditional PID (proportional-integral-derivative) control, the nonlinear integral SMC-ILC had significant advantages in trajectory tracking accuracy and robustness. The experimental results verified the effectiveness of the designed controller in practical swimming pool cleaning robot applications, which could achieve precise trajectory tracking under external interference and slip interference, thereby improving cleaning efficiency. The research results provide a new solution for the intelligent control of swimming pool cleaning robots and offer theoretical basis and practical support for trajectory tracking control in related fields.
|
|
Received: 06 March 2025
Published: 30 December 2025
|
|
|
基于改进SMC与ILC的泳池清洁机器人轨迹跟踪控制
针对泳池清洁机器人在执行任务时因外部干扰和转向滑移而偏离预定轨迹的问题,提出了一种基于改进滑模控制(sliding mode control, SMC)和(iterative learning control, ILC)的轨迹跟踪控制方法,旨在提高机器人在滑移干扰下的轨迹跟踪精度。首先,建立了机器人的运动学模型和动力学模型,并引入滑移参数以表征滑移干扰的影响。然后,结合SMC增强了机器人控制系统的鲁棒性,设计了适应滑移干扰的非线性积分滑模面,并利用ILC进一步提高了轨迹跟踪精度。最后,采用PD(proportional-derivative,比例-微分)型闭环ILC控制律作为反馈,通过理论分析证明了非线性积分SMC-ILC控制器在滑移干扰下的稳定性和收敛性。仿真结果显示,与传统的PID(proportional-integral-derivative,比例-积分-微分)控制相比,非线性积分SMC-ILC在轨迹跟踪精度和鲁棒性上具有显著优势。实验结果验证了所设计的控制器在实际泳池清洁机器人应用中的有效性,其能够在外部干扰和滑移干扰下实现精确的轨迹跟踪,进而提升清洁效率。研究结果为泳池清洁机器人的智能控制提供了新的解决方案,并为相关领域的轨迹跟踪控制提供了理论依据和实践支持。
关键词:
滑模控制,
泳池清洁机器人,
迭代学习控制,
轨迹跟踪
|
|
| [[1]] |
何笑书. 泳池清洁机器人的研究与设计[D]. 杭州: 浙江工业大学, 2020: 1-5.
HE X S. Research and design of swimming pool cleaning robot[D]. Hangzhou: Zhejiang University of Technology, 2020: 1-5.
|
|
|
| [[2]] |
王跃明. 泳池清洁机器人水下定位系统设计[D]. 天津: 天津工业大学, 2023: 1-8.
WANG Y M. Design of underwater positioning system for the robotic pool cleaner[D]. Tianjin: Tiangong University, 2023: 1-8.
|
|
|
| [[3]] |
游东亚, 崔立志, 卜旭辉, 等. 轮式机器人纵向滑移迭代学习轨迹跟踪控制[J]. 电光与控制, 2022, 29(9): 96-101.
YOU D Y, CUI L Z, BU X H, et al. Longitudinal slippage iterative learning trajectory tracking control of wheeled robots[J]. Electronics Optics & Control, 2022, 29(9): 96-101.
|
|
|
| [[4]] |
李岩, 杨向东, 陈恳. 履带式移动机器人动力学模型及其反馈控制[J]. 清华大学学报(自然科学版), 2006, 46(8): 1377-1380.
LI Y, YANG X D, CHEN K. Dynamics model and feedback control of tracked robots[J]. Journal of Tsinghua University (Science and Technology), 2006, 46(8): 1377-1380.
|
|
|
| [[5]] |
UCHIYAMA M. Formation of high-speed motion pattern of a mechanical arm by trial[J]. Transactions of the Society of Instrument and Control Engineers, 1978, 14(6): 706-712.
|
|
|
| [[6]] |
周博文, 张海峰, 李秦川. 2R1T并联机器人滑模自适应迭代学习控制[J]. 机器人, 2024, 46(3): 317-329.
ZHOU B W, ZHANG H F, LI Q C. Adaptive sliding-mode iterative learning control for 2R1T parallel robots[J]. Robot, 2024, 46(3): 317-329.
|
|
|
| [[7]] |
KIMURA M, OKAMOTO S, LEE J H. Operation of vehicle robot by deep learning using brain-wave[J]. The Proceedings of Conference of Chugoku-Shikoku Branch, 2019, 57: 1115.
|
|
|
| [[8]] |
韦建明, 王宏, 邹强. 非线性时滞系统迭代学习控制[M]. 北京: 国防工业出版社, 2023: 3-13. doi:10.1007/978-981-19-6317-9
WEI J M, WANG H, ZOU Q. Iterative learning control for nonlinear time-delay system[M]. Beijing: National Defense Industry Press, 2023: 3-13.
doi: 10.1007/978-981-19-6317-9
|
|
|
| [[9]] |
LI X H, LIU X P, WANG G, et al. Discrete open-closed-loop PID-type iterative learning control for trajectory tracking of tracked mobile robots[J]. International Journal of Advanced Robotic Systems, 2022, 19(6): 172988062211372.
|
|
|
| [[10]] |
YU Q X, HOU Z S, XU J X. D-type ILC based dynamic modeling and norm optimal ILC for high-speed trains[J]. IEEE Transactions on Control Systems Technology, 2018, 26(2): 652-663.
|
|
|
| [[11]] |
陶洪峰, 董晓齐, 杨慧中. 离散非线性系统的迭代学习轨迹跟踪鲁棒算法优化及应用[J]. 信息与控制, 2016, 45(4): 385-390.
TAO H F, DONG X Q, YANG H Z. Robust optimization and application of iterative learning trajectory tracking algorithm for discrete nonlinear systems[J]. Information and Control, 2016, 45(4): 385-390.
|
|
|
| [[12]] |
MENG D Y, MOORE K L. Robust iterative learning control for nonrepetitive uncertain systems[J]. IEEE Transactions on Automatic Control, 2017, 62(2): 907-913.
|
|
|
| [[13]] |
PEROZZI G, EFIMOV D, BIANNIC J M, et al. Trajectory tracking for a quadrotor under wind perturbations: sliding mode control with state-dependent gains[J]. Journal of the Franklin Institute, 2018, 355(12): 4809-4838.
|
|
|
| [[14]] |
王策, 杨升, 张磊, 等. 基于指数增益迭代学习的机械臂二阶滑模控制方法[J]. 化工自动化及仪表, 2023, 50(5): 644-651.
WANG C, YANG S, ZHANG L, et al. The second-order sliding mode control method for manipulator based on exponential gain iterative learning[J]. Control and Instruments in Chemical Industry, 2023, 50(5): 644-651.
|
|
|
| [[15]] |
CHEN F Y, JIANG R Q, ZHANG K K, et al. Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 5044-5056.
|
|
|
| [[16]] |
ABRO G E M, ZULKIFLI S A B M, ASIRVADAM V S, et al. Model-free-based single-dimension fuzzy SMC design for underactuated quadrotor UAV[J]. Actuators, 2021, 10(8): 191.
|
|
|
| [[17]] |
REDROVAN D V, KIM D. Multiple quadrotors flight formation control based on sliding mode control and trajectory tracking[C]//2018 International Conference on Electronics, Information, and Communication. Honolulu, HI, Jan. 24-27, 2018.
|
|
|
| [[18]] |
王娟, 赵成璟, 董升昊. 基于滑模自适应迭代学习的四旋翼无人机轨迹跟踪[J]. 电光与控制, 2024, 31(3): 36-40.
WANG J, ZHAO C J, DONG S H. Trajectory tracking of quadrotor UAV based on sliding mode adaptive iterative learning[J]. Electronics Optics & Control, 2024, 31(3): 36-40.
|
|
|
| [[19]] |
刘金琨, 孙富春. 滑模变结构控制理论及其算法研究与进展[J]. 控制理论与应用, 2007, 24(3): 407-418.
LIU J K, SUN F C. Research and development on theory and algorithms of sliding mode control[J]. Control Theory & Applications, 2007, 24(3): 407-418.
|
|
|
| [[20]] |
GOSWAMI N K, PADHY P K. Sliding mode controller design for trajectory tracking of a non-holonomic mobile robot with disturbance[J]. Computers & Electrical Engineering, 2018, 72: 307-323.
|
|
|
| [[21]] |
LU E, MA Z, LI Y M, et al. Adaptive backstepping control of tracked robot running trajectory based on real-time slip parameter estimation[J]. International Journal of Agricultural and Biological Engineering, 2020, 13(4): 178-187.
|
|
|
| [[22]] |
LEVANT A. Universal single-input-single-output (SISO) sliding-mode controllers with finite-time convergence[J]. IEEE Transactions on Automatic Control, 2001, 46(9): 1447-1451.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|