| 机器人与机构设计 |
|


|
|
|
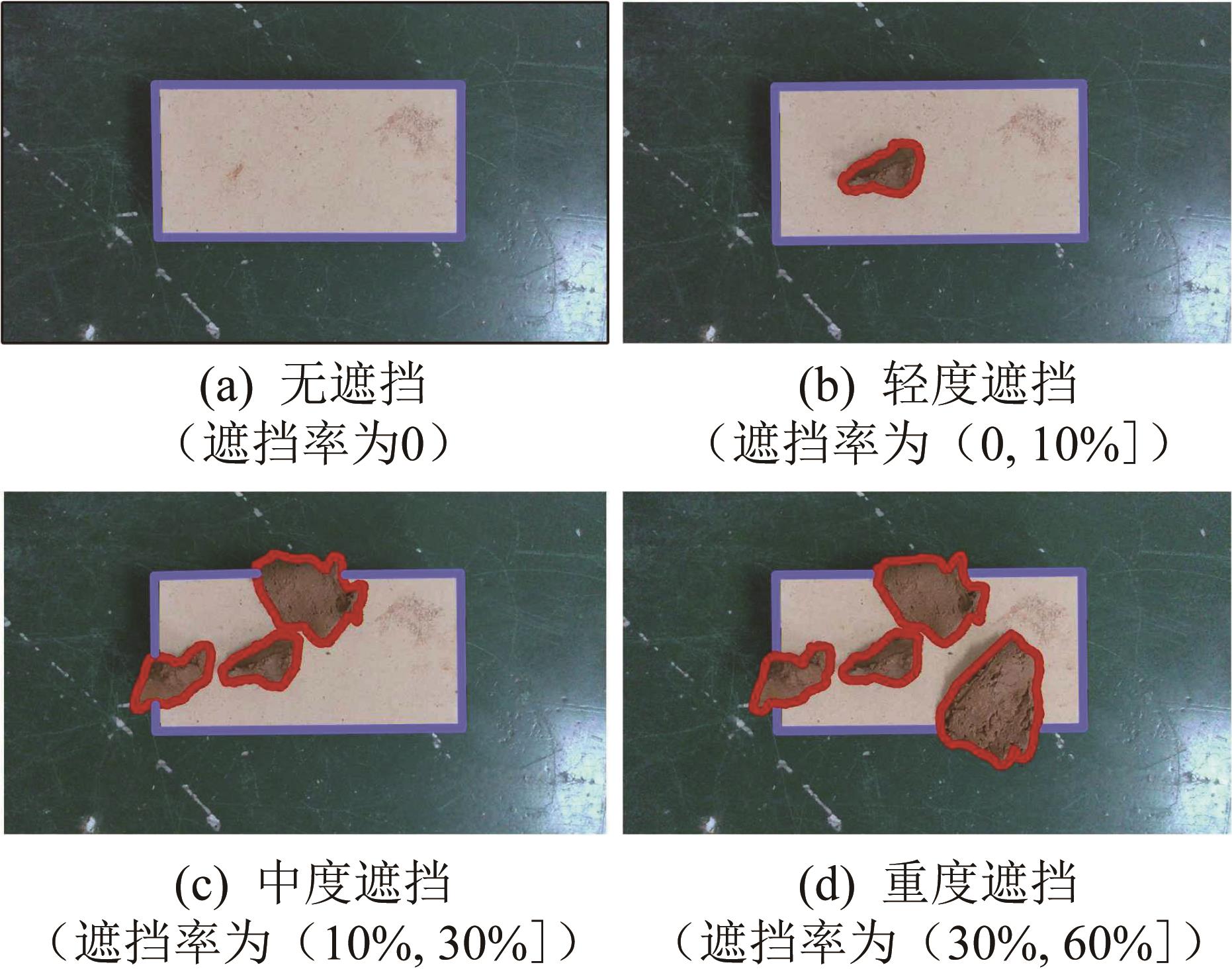
| 面向泥浆遮挡的涂抹机器人双目视觉定位方法研究 |
左鹏1,2( ),郑正鼎1,2(),高全杰1,2,吴林飞1,2,王红霞3 ),郑正鼎1,2(),高全杰1,2,吴林飞1,2,王红霞3 |
1.武汉科技大学 冶金装备及其控制教育部重点实验室, 湖北 武汉 430081
2.武汉科技大学 机械传动与制造工程湖北省重点实验室, 湖北 武汉 430081
3.湖北汽车工业学院, 湖北 十堰 442002 |
|
| Stereo visual localization method for plastering robots under mud occlusion |
| PENG ZUO1,2(),Zhengding ZHENG1,2(),Quanjie GAO1,2,Linfei WU1,2,Hongxia WANG3 |
1.Key Laboratory of Metallurgical Equipment and Control Technology of Ministry of Education, Wuhan University of Science and Technology, Wuhan 430081, China
2.Hubei Key Laboratory of Mechanical Transmission and Manufacturing Engineering, Wuhan University of Science and Technology, Wuhan 430081, China
3.Hubei University of Automotive Technology, Shiyan 442002, China |
引用本文:
左鹏,郑正鼎,高全杰,吴林飞,王红霞. 面向泥浆遮挡的涂抹机器人双目视觉定位方法研究[J]. 工程设计学报, 2026, 33(1): 65-75.
PENG ZUO,Zhengding ZHENG,Quanjie GAO,Linfei WU,Hongxia WANG. Stereo visual localization method for plastering robots under mud occlusion[J]. Chinese Journal of Engineering Design, 2026, 33(1): 65-75.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2026.05.247
或
https://www.zjujournals.com/gcsjxb/CN/Y2026/V33/I1/65
|
| [1] |
章严. 传统抹灰与抹灰机器人的应用分析[J]. 绿色建造与智能建筑, 2025(1): 96-98.
ZHANG Y. Application analysis of traditional plastering and plastering robots[J]. Green Construction and Intelligent Building, 2025(1): 96-98.
|
| [2] |
张广川. 可实现自动砌墙的建筑机器人设计[J]. 机械, 2011, 38(8): 79-80.
ZHANG G C. Design of building robot that can realize automatic wall-built[J]. Machinery, 2011, 38(8): 79-80.
|
| [3] |
LI H, ZENG Q F, ZHUANG T D, et al. Accurate pose estimation of the texture-less objects with known CAD models via point cloud matching[J]. IEEE Sensors Journal, 2023, 23(21): 26259-26268.
|
| [4] |
张旭辉, 杨骏豪, 杨文娟, 等. 基于双目视觉的掘进装备定位系统移站自主标定方法[J]. 工程设计学报, 2025, 32(1): 1-10.
ZHANG X H, YANG J H, YANG W J, et al. Automatic calibration method for station transfer in tunneling equipment positioning system based on binocular vision[J]. Chinese Journal of Engineering Design, 2025, 32(1): 1-10.
|
| [5] |
张宇廷, 王宗彦, 王曦, 等. 改进K-means聚类算法的自适应Canny算子工件边缘检测[J]. 组合机床与自动化加工技术, 2022(5): 1-5.
ZHANG Y T, WANG Z Y, WANG X, et al. Edge detection of workpiece based on improved K-means clustering algorithm and adaptive canny algorithm[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2022(5): 1-5.
|
| [6] |
CHEN J L, WEI X L, LIANG X Q, et al. High precision 3D reconstruction and target location based on the fusion of visual features and point cloud registration[J]. Measurement, 2025, 243: 116455.
|
| [7] |
BIGLIA A, ZAMAN S, GAY P, et al. 3D point cloud density-based segmentation for vine rows detection and localisation[J]. Computers and Electronics in Agriculture, 2022, 199: 107166.
|
| [8] |
ZHANG X L, LI H L, MENG F M, et al. Segmenting beyond the bounding box for instance segmentation[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2022, 32(2): 704-714.
|
| [9] |
JIN T T, HAN X Z, WANG P G, et al. Enhanced deep learning model for apple detection, localization, and counting in complex orchards for robotic arm-based harvesting[J]. Smart Agricultural Technology, 2025, 10: 100784.
|
| [10] |
AARTHI R, RISHMA G. A vision based approach to localize waste objects and geometric features exaction for robotic manipulation[J]. Procedia Computer Science, 2023, 218: 1342-1352.
|
| [11] |
LIU X, WANG H, XUE S B, et al. SEMPose: a single end-to-end network for multi-object pose estimation[J]. Neurocomputing, 2025, 654: 131194.
|
| [12] |
NI P Y, ANG M H. Graduated non-convex feature-metric-based 6D object pose refinement via deep reinforcement learning[J]. Robotics and Autonomous Systems, 2025, 194: 105177.
|
| [13] |
ZHAO H W, MA W H, JI P R, et al. Modeling the measurement accuracy for binocular stereo vision system[J]. Optics Express, 2025, 33(9): 19051-19066.
|
| [14] |
BI X, YANG B, ZENG J, et al. A novel holes filling method based on layered depth map and patch sparsity for complex-scene images[J]. Microelectronics Journal, 2021, 114: 105140.
|
| [15] |
LIU W, CHEN X G, YANG J, et al. Robust color guided depth map restoration[J]. IEEE Transactions on Image Processing, 2017, 26(1): 315-327.
|
| [16] |
WANG Z Y, HU J H, WANG S Z, et al. Trilateral constrained sparse representation for Kinect depth hole filling[J]. Pattern Recognition Letters, 2015, 65: 95-102.
|
| [17] |
叶锦华, 林旭敏, 吴海彬. 基于DBSCAN的改进RANSAC点云平面拟合算法[J]. 湖南大学学报(自然科学版), 2025, 52(2): 76-87.
YE J H, LIN X M, WU H B. Improved RANSAC point cloud plane fitting algorithm based on DBSCAN[J]. Journal of Hunan University (Natural Sciences), 2025, 52(2): 76-87.
|
| [18] |
徐岩松, 张爱军, 杨萌. 基于局部梯度统计的自适应各向异性扩散[J]. 激光杂志, 2023, 44(8): 60-64.
XU Y S, ZHANG A J, YANG M. Adaptive anisotropic diffusion based on local gradient statistics[J]. Laser Journal, 2023, 44(8): 60-64.
|
| [19] |
RUHELA R, GUPTA B, SINGH LAMBA S. An efficient approach for texture smoothing by adaptive joint bilateral filtering[J]. The Visual Computer, 2023, 39(5): 2035-2049.
|
| [20] |
WU Z R, LIN D H, TANG X O. Deep Markov random field for image modeling[C]//Computer Vision-ECCV 2016. Cham: Springer, 2016: 295-312.
|
| [21] |
万琴, 朱晓林, 陈国泉, 等. 分层联合双边滤波的深度图修复算法研究[J]. 计算机工程与应用, 2021, 57(6): 184-190.
WAN Q, ZHU X L, CHEN G Q, et al. Research on depth map restoration algorithm based on hierarchical joint bilateral filter[J]. Computer Engineering and Applications, 2021, 57(6): 184-190.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|