| 机器人与机构设计 |
|


|
|
|
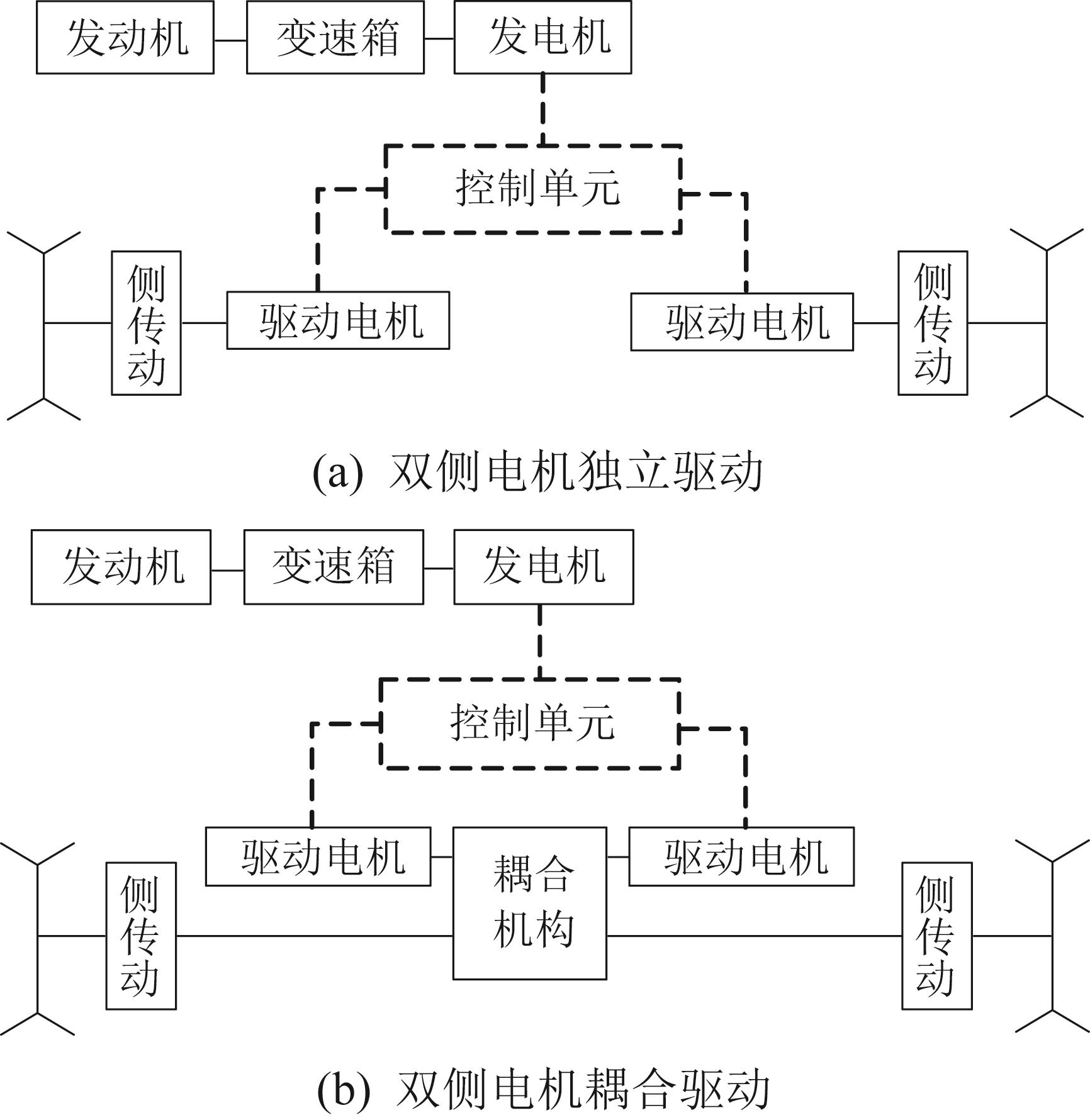
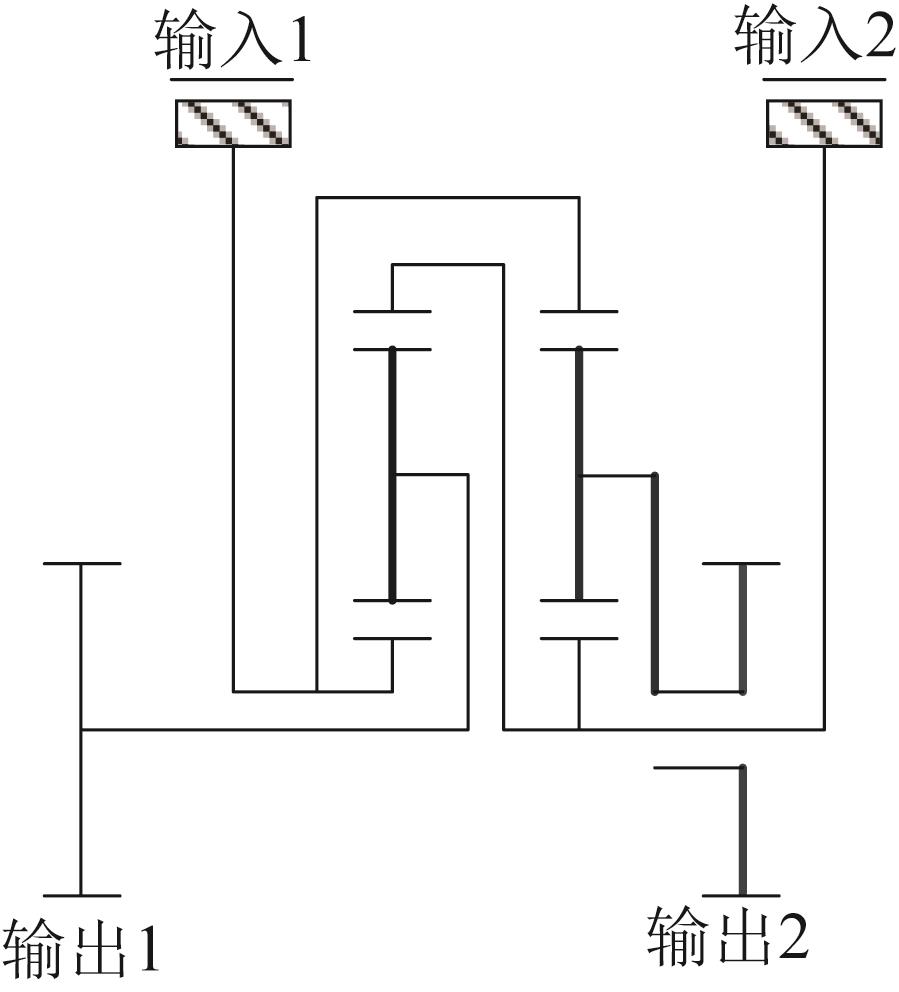
| 履带车辆双输入双输出耦合机构拓扑综合研究 |
邢庆坤1,2( ),杨双愿3,秦大同1,李学良3(),彭增雄4 ),杨双愿3,秦大同1,李学良3(),彭增雄4 |
1.重庆大学 高端装备机械传动全国重点实验室,重庆 400044
2.中国北方车辆研究所 车辆传动重点实验室,北京 100072
3.燕山大学 特种运载装备河北省重点实验室,河北 秦皇岛 066004
4.北京理工大学 车辆传动重点实验室,北京 100081 |
|
| Topology synthesis research of dual-input-dual-output coupling mechanism for tracked vehicle |
| Qingkun XING1,2(),Shuangyuan YANG3,Datong QIN1,Xueliang LI3(),Zengxiong PENG4 |
1.State Key Laboratory of Mechanical Transmission for Advanced Equipment, Chongqing University, Chongqing 400044, China
2.Key Laboratory of Vehicle Transmission, China North Vehicle Research Institute, Beijing 100072, China
3.Hebei Key Laboratory of Special Delivery Equipment, Yanshan University, Qinhuangdao 066004, China
4.Key Laboratory of Vehicle Transmission, Beijing Institute of Technology, Beijing 100081, China |
引用本文:
邢庆坤,杨双愿,秦大同,李学良,彭增雄. 履带车辆双输入双输出耦合机构拓扑综合研究[J]. 工程设计学报, 2025, 32(4): 463-473.
Qingkun XING,Shuangyuan YANG,Datong QIN,Xueliang LI,Zengxiong PENG. Topology synthesis research of dual-input-dual-output coupling mechanism for tracked vehicle[J]. Chinese Journal of Engineering Design, 2025, 32(4): 463-473.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.04.187
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I4/463
|
| [1] |
陈兵, 马凯璇, 刘洋, 等. 双电机驱动履带车辆直驶稳定性分层控制策略[J]. 吉林大学学报(工学版), 2023, 53(10): 2752-2760.
CHEN B, MA K X, LIU Y, et al. Straight driving stability hierarchical control for dual-motor driving electric tracked vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(10): 2752-2760.
|
| [2] |
张杰, 袁东, 张朋, 等. 双侧电传动履带车辆模糊前馈-反馈转向控制[J]. 兵工学报, 2020, 41(8): 1688-1696.
ZHANG J, YUAN D, ZHANG P, et al. Steering control based on fuzzy feedforward and feedback for dual-motor electric drive tracked vehicle[J]. Acta Armamentarii, 2020, 41(8): 1688-1696.
|
| [3] |
魏巍, 闫清东, 刘城, 等. 装甲车辆设计[M]. 2版. 北京: 北京理工大学出版社, 2022.
WEI W, YAN Q D, LIU C, et al. Design of armored vehicles [M]. 2th ed. Beijing: Beijing Institute of Technology Press, 2022.
|
| [4] |
生辉, 项昌乐, 盖江涛, 等. 双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制[J]. 兵工学报, 2023, 44(11): 3498-3507.
SHENG H, XIANG C L, GAI J T, et al. Vehicle safety control of tracked vehicle driven by two-sided motor coupling under the failure mode of one-sided motor[J]. Acta Armamentarii, 2023, 44(11): 3498-3507.
|
| [5] |
ARNAUDOV K, KARAIVANOV D. Alternative method for analysis of complex compound planetary gear trains: essence and possibilities[C]//Power Transmissions: Proceedings of the 4th International Conference. Sinaia, Romania, June 20-23, 2012.
|
| [6] |
CHEN H, CHEN X A. A new methodology for multistage multispeed planetary transmission design based on geometry[J]. Journal of Mechanical Design, 2021, 143(11): 113401.
|
| [7] |
DENG T, TANG P, SU Z H, et al. Systematic design and optimization method of multimode hybrid electric vehicles based on equivalent tree graph[J]. IEEE Transactions on Power Electronics, 2020, 35(12): 13465-13474.
|
| [8] |
GENG M J, DING H F, KE T, et al. Topological graph representation and configuration synthesis for power-split hybrid transmissions of multi-planetary gear trains[J]. Journal of Mechanical Design, 2023, 145(12): 123401.
|
| [9] |
GAO M F, HU J B. Kinematic analysis of planetary gear trains based on topology[J]. Journal of Mechanical Design, 2018, 140(1): 012302.
|
| [10] |
高明飞, 胡纪滨, 李学良, 等. 履带车辆传动机构实现转向再生功率传递的构型特征研究[J]. 机械工程学报, 2019, 55(24): 137-144. doi:10.3901/jme.2019.24.137
GAO M F, HU J B, LI X L, et al. Study on the characteristics of configuration for the transmission of tracked vehicles to achieve the transfer of steering regenerative power[J]. Journal of Mechanical Engineering, 2019, 55(24): 137-144.
doi: 10.3901/jme.2019.24.137
|
| [11] |
YANG X D, SHAO Y M, WANG L M, et al. Configuration design of dual-input compound power-split mechanism for in-wheel motor-driven electrical vehicles based on an improved lever analogy method[J]. Journal of Mechanical Design, 2021, 143(10): 104501.
|
| [12] |
KIM H, KUM D. Comprehensive design methodology of input- and output-split hybrid electric vehicles: in search of optimal configuration[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(6): 2912-2923.
|
| [13] |
BARHOUMI T, KIM H, KUM D. Automatic generation of design space conversion maps and its application for the design of compound split hybrid powertrains[J]. Journal of Mechanical Design, 2018, 140(6): 063401.
|
| [14] |
SONG C, HWANG J, KUM D. Efficient design space exploration of multi-mode, two-planetary-gear, power-split hybrid electric powertrains via virtual levers[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 23(4): 3498-3509.
|
| [15] |
BARHOUMI T, KUM D. Designing a super-fast prius: systematic design of multispeed eCVT via virtual design space[J]. IEEE Transactions on Transportation Electrification, 2024, 10(1): 263-276.
|
| [16] |
胡建军, 薛首志, 刘子睿. 一种履带车辆三行星排混合动力系统构型优化设计方案[J]. 中国公路学报, 2024, 37(7): 317-328.
HU J J, XUE S Z, LIU Z R. Optimization design for a hybrid electric powertrain system with three-planetary gear sets of tracked vehicles[J]. China Journal of Highway and Transport, 2024, 37(7): 317-328.
|
| [17] |
秦兆博. 混合动力履带车辆机电复合传动系统优化设计方法[D]. 北京: 清华大学, 2018: 46-47. doi:10.1115/1.4039687
QIN Z B. Optimal design methodology of the electro-mechanical transmission system for hybrid tracked vehicles [D]. Beijing: Tsinghua University, 2018: 46-47,
doi: 10.1115/1.4039687
|
| [18] |
LI R, FAN J J, HAN Z D, et al. Configuration design and control of hybrid tracked vehicle with three planetary gear sets[J]. Journal of Central South University, 2021, 28(7): 2105-2119.
|
| [19] |
PENG H, QIN D T, HU J J, et al. Synthesis and analysis method for powertrain configuration of single motor hybrid electric vehicle[J]. Mechanism and Machine Theory, 2020, 146: 103731.
|
| [20] |
韩政达, 毛明, 马晓枫, 等. 履带车辆机电复合传动耦合机构数学特征的研究[J]. 车辆与动力技术, 2012(1): 1-2, 12.
HAN Z D, MAO M, MA X F, et al. Research on mathematical characteristics of coupling mechanism for electro-mechanical transmission tracked vehicle[J]. Vehicle & Power Technology, 2012(1): 1-2, 12.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|