|
|
|
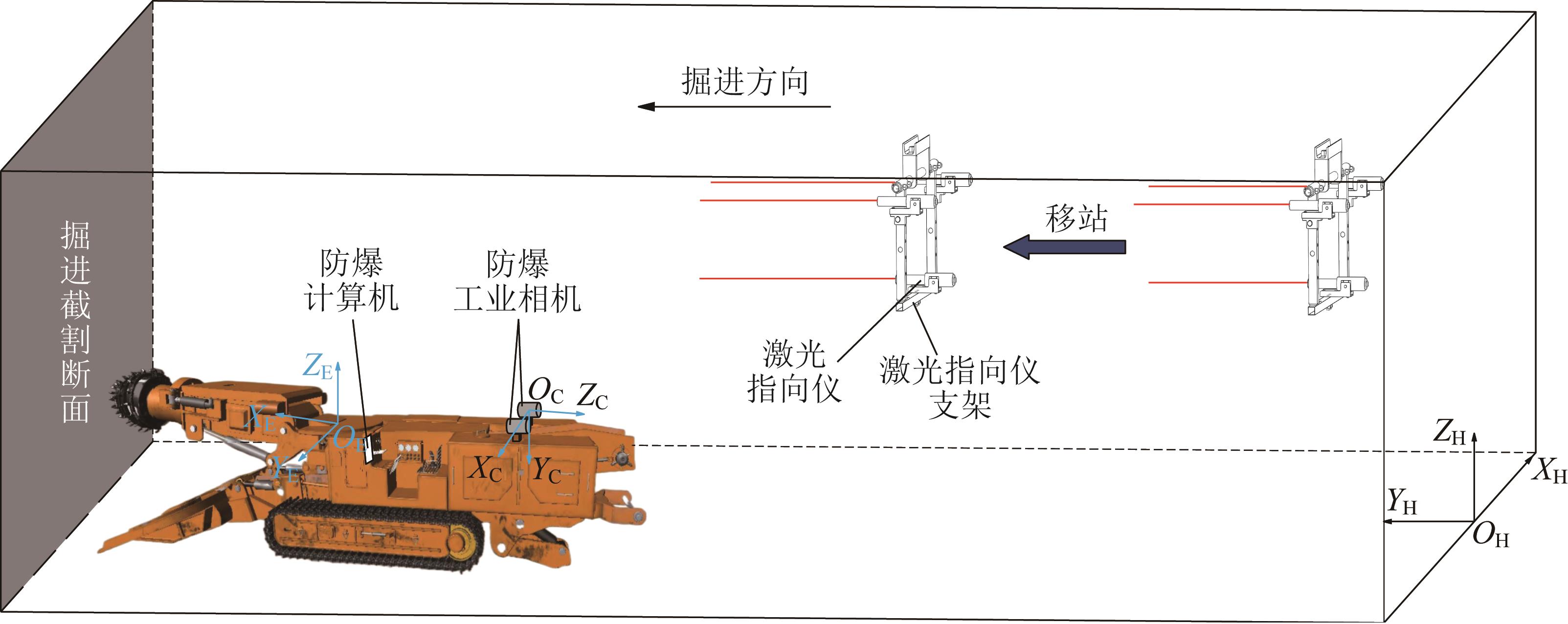
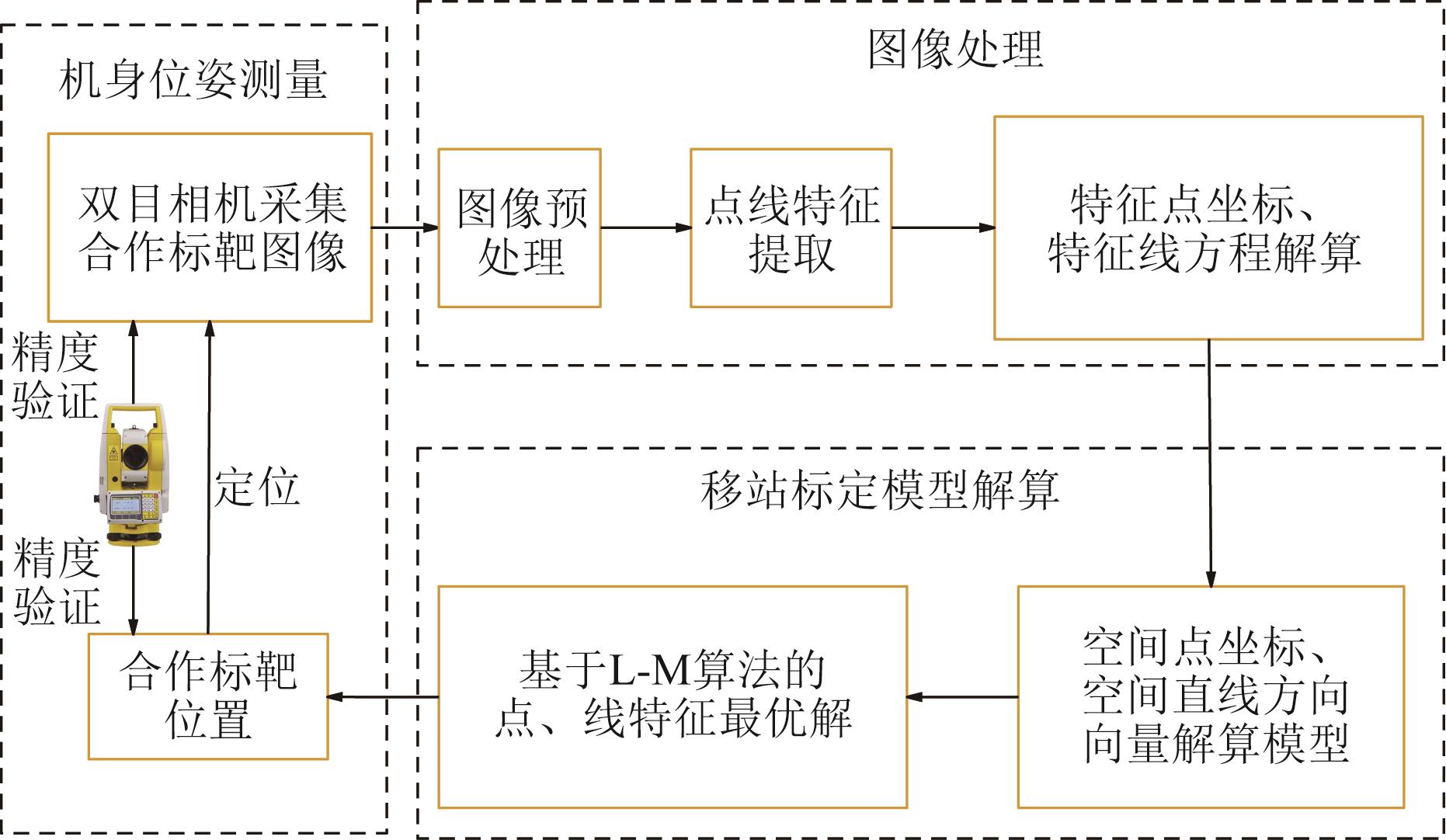
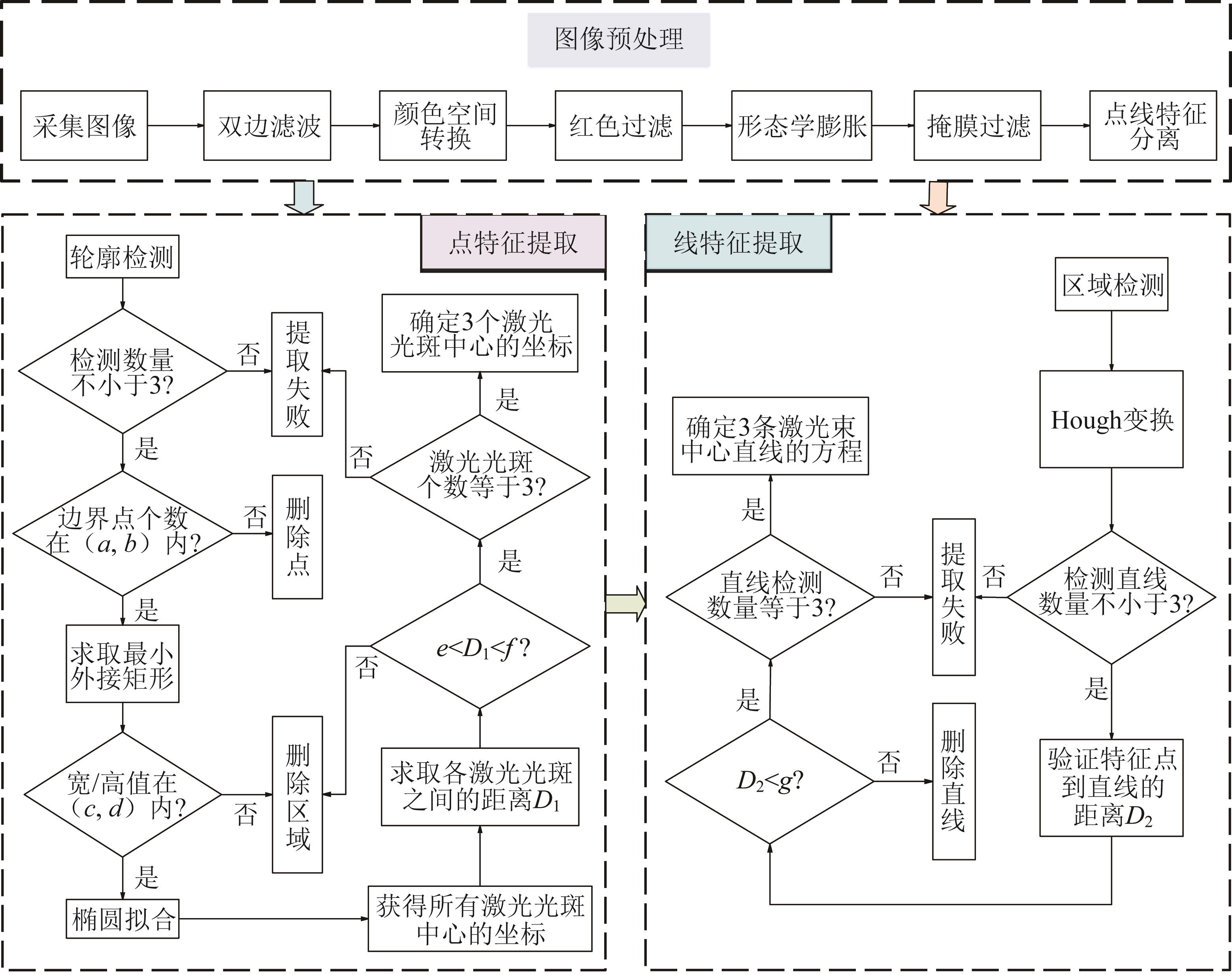
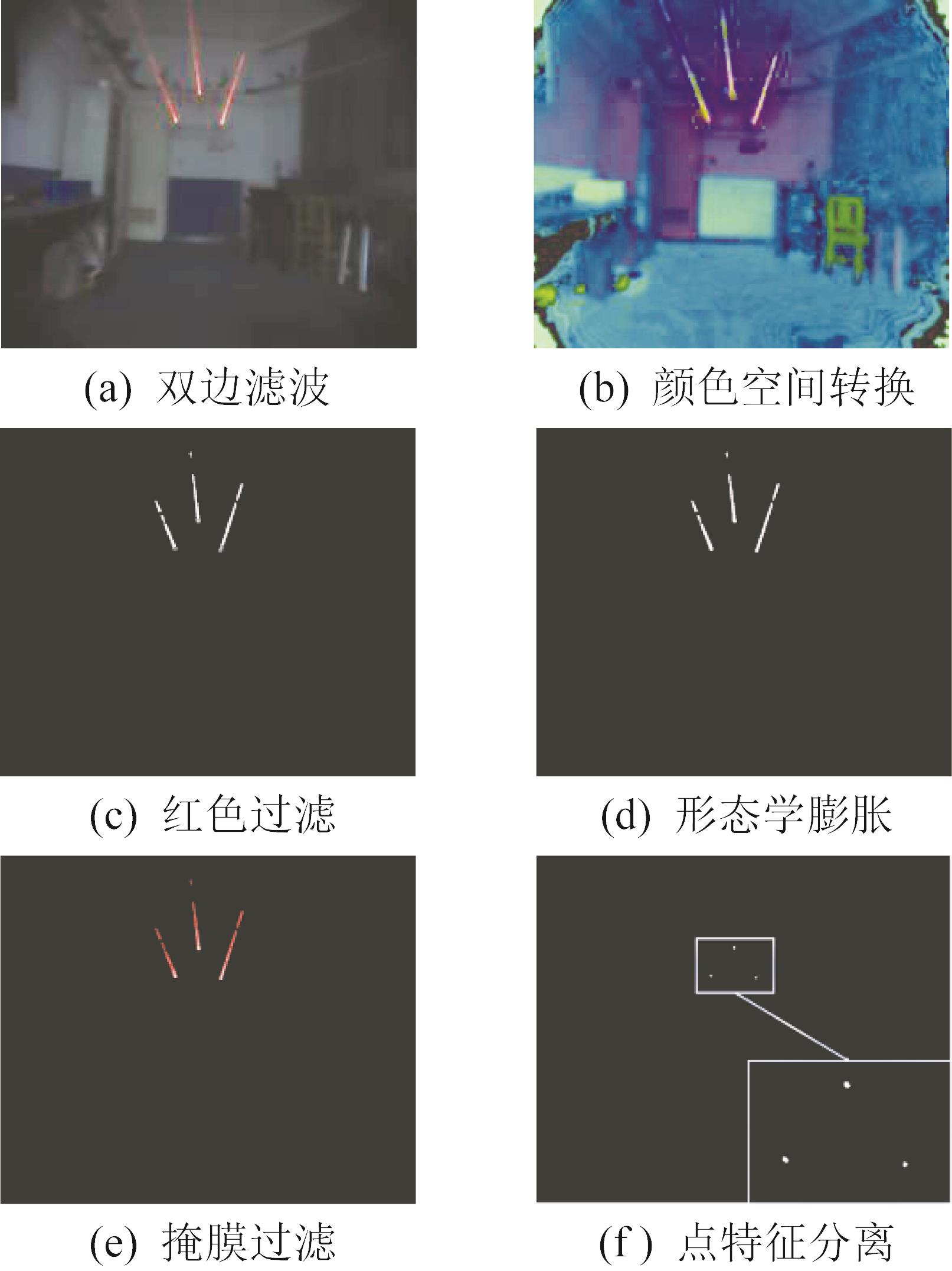
| 基于双目视觉的掘进装备定位系统移站自主标定方法 |
张旭辉1,2( ),杨骏豪1,杨文娟1,2,张超1,陈鑫1,万继成1,刘彦徽1,王悦1 ),杨骏豪1,杨文娟1,2,张超1,陈鑫1,万继成1,刘彦徽1,王悦1 |
1.西安科技大学 机械工程学院,陕西 西安 710054
2.陕西省矿山机电装备智能检测与控制重点实验室,陕西 西安 710054 |
|
| Automatic calibration method for station transfer in tunneling equipment positioning system based on binocular vision |
| Xuhui ZHANG1,2(),Junhao YANG1,Wenjuan YANG1,2,Chao ZHANG1,Xin CHEN1,Jicheng WAN1,Yanhui LIU1,Yue WANG1 |
1.College of Mechanical Engineering, Xi'an University of Science and Technology, Xi'an 710054, China
2.Shaanxi Key Laboratory of Intelligent Detection and Control for Mining Electromechanical Equipment, Xi'an 710054, China |
引用本文:
张旭辉,杨骏豪,杨文娟,张超,陈鑫,万继成,刘彦徽,王悦. 基于双目视觉的掘进装备定位系统移站自主标定方法[J]. 工程设计学报, 2025, 32(1): 1-10.
Xuhui ZHANG,Junhao YANG,Wenjuan YANG,Chao ZHANG,Xin CHEN,Jicheng WAN,Yanhui LIU,Yue WANG. Automatic calibration method for station transfer in tunneling equipment positioning system based on binocular vision[J]. Chinese Journal of Engineering Design, 2025, 32(1): 1-10.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2025.04.111
或
https://www.zjujournals.com/gcsjxb/CN/Y2025/V32/I1/1
|
| 1 |
王国法, 杜毅博, 陈晓晶, 等. 从煤矿机械化到自动化和智能化的发展与创新实践: 纪念《工矿自动化》创刊50周年[J]. 工矿自动化, 2023, 49(6): 1-18.
WANG G F, DU Y B, CHEN X J, et al. Development and innovative practice from coal mine mechanization to automation and intelligence: commemorating the 50th anniversary of the founding of Journal of Mine Automation [J]. Journal of Mine Automation, 2023, 49(6): 1-18.
|
| 2 |
杜雨馨, 张贺, 王树臣, 等. 综掘系统视觉处理技术研究现状及发展趋势[J]. 工矿自动化, 2023, 49(11): 22-38, 75.
DU Y X, ZHANG H, WANG S C, et al. Research status and development trend of visual processing technology for fully mechanized excavation systems[J]. Journal of Mine Automation, 2023, 49(11): 22-38, 75.
|
| 3 |
田臣, 覃杰, 王强, 等. 煤矿智能掘进装备发展现状与关键技术探讨[J]. 中国煤炭, 2023, 49(7): 102-108.
TIAN C, QIN J, WANG Q, et al. Discussion on the development status and key technologies of intelligent excavation equipment in coal mines[J]. China Coal, 2023, 49(7): 102-108.
|
| 4 |
田伟琴, 田原, 贾曲, 等. 悬臂式掘进机导航技术研究现状及发展趋势[J]. 煤炭科学技术, 2022, 50(3): 267-274.
TIAN W Q, TIAN Y, JIA Q, et al. Research status and development trend of cantilever roadheader navigation technology[J]. Coal Science and Technology, 2022, 50(3): 267-274.
|
| 5 |
胡兴涛, 朱涛, 苏继敏, 等. 煤矿巷道智能化掘进感知关键技术[J]. 煤炭学报, 2021, 46(7): 2123-2135. doi:10.13225/j.cnki.jccs.JJ21.0583
HU X T, ZHU T, SU J M, et al. Key technology of intelligent drivage perception in coal mine roadway[J]. Journal of China Coal Society, 2021, 46(7): 2123-2135.
doi: 10.13225/j.cnki.jccs.JJ21.0583
|
| 6 |
张旭辉, 沈奇峰, 杨文娟, 等. 基于三激光点标靶的掘进机机身视觉定位技术研究[J]. 电子测量与仪器学报, 2022, 36(6): 178-186.
ZHANG X H, SHEN Q F, YANG W J, et al. Research on visual positioning technology of roadheader body based on three laser point target[J]. Journal of Electronic Measurement and Instrumentation, 2022, 36(6): 178-186.
|
| 7 |
杨文娟, 张旭辉, 马宏伟, 等. 悬臂式掘进机机身及截割头位姿视觉测量系统研究[J]. 煤炭科学技术, 2019, 47(6): 50-57.
YANG W J, ZHANG X H, MA H W, et al. Research on position and posture measurement system of body and cutting head for boom-type roadheader based on machine vision[J]. Coal Science and Technology, 2019, 47(6): 50-57.
|
| 8 |
杨文娟, 张旭辉, 张超, 等. 基于三激光束标靶的煤矿井下长距离视觉定位方法[J]. 煤炭学报, 2022, 47(2): 986-1001.
YANG W J, ZHANG X H, ZHANG C, et al. Long distance vision localization method based on triple laser beams target in coal mine[J]. Journal of China Coal Society, 2022, 47(2): 986-1001.
|
| 9 |
杨健健, 张强, 吴淼, 等. 巷道智能化掘进的自主感知及调控技术研究进展[J]. 煤炭学报, 2020, 45(6): 2045-2055.
YANG J J, ZHANG Q, WU M, et al. Research progress of autonomous perception and control technology for intelligent heading[J]. Journal of China Coal Society, 2020, 45(6): 2045-2055.
|
| 10 |
张旭辉, 张楷鑫, 张超, 等. 悬臂式掘进机视觉位姿检测系统外参标定方法[J]. 机械科学与技术, 2022, 41(12): 1928-1935.
ZHANG X H, ZHANG K X, ZHANG C, et al. Calibrating external parameters of visual position detection system of cantilever roadheader[J]. Mechanical Science and Technology for Aerospace Engineering, 2022, 41(12): 1928-1935.
|
| 11 |
ZOU X J, ZOU H X, LU J. Virtual manipulator-based binocular stereo vision positioning system and errors modelling[J]. Machine Vision and Applications, 2012, 23(1): 43-63.
|
| 12 |
MA W P, LI W X, CAO P X. Binocular vision object positioning method for robots based on coarse-fine stereo matching[J]. International Journal of Automation and Computing, 2020, 17(4): 562-571.
|
| 13 |
LU K, WANG X Y, WANG Z, et al. Binocular stereo vision based on OpenCV[C]//IET International Conference on Smart and Sustainable City. Shanghai, Jul. 6-8, 2011.
|
| 14 |
LAI X B, WANG H S, XU Y H. A real-time range finding system with binocular stereo vision[J]. International Journal of Advanced Robotic Systems, 2012, 9(1): 26.
|
| 15 |
刘勇. 基于机器视觉的掘进机截割头姿态检测系统[J]. 煤矿机械, 2020, 41(3): 187-189.
LIU Y. Attitude detection system of cutting head of roadheader based on machine vision[J]. Coal Mine Machinery, 2020, 41(3): 187-189.
|
| 16 |
张杜娟. 基于肤色模型与颜色空间的目标识别算法[J]. 国外电子测量技术, 2019, 38(10): 54-58.
ZHANG D J. Target recognition algorithm based on skin color model and color space[J]. Foreign Electronic Measurement Technology, 2019, 38(10): 54-58.
|
| 17 |
王宁, 宋慧慧, 张开华. 基于距离加权重叠度估计与椭圆拟合优化的精确目标跟踪算法[J]. 计算机应用, 2021, 41(4): 1100-1105. doi:10.11772/j.issn.1001-9081.2020060869
WANG N, SONG H H, ZHANG K H. Accurate object tracking algorithm based on distance weighting overlap prediction and ellipse fitting optimization[J]. Journal of Computer Applications, 2021, 41(4): 1100-1105.
doi: 10.11772/j.issn.1001-9081.2020060869
|
| 18 |
刘爱胤, 熊根良, 姚健康, 等. 基于霍夫圆检测的标志物多图像特征定位方法[J]. 计算机仿真, 2021, 38(3): 341-345.
LIU A Y, XIONG G L, YAO J K, et al. Marker localization method on multiple image features based on Hough circle detection[J]. Computer Simulation, 2021, 38(3): 341-345.
|
| 19 |
王学敏, 于洪波, 张翔宇, 等. 基于Hough变换检测前跟踪的水下多目标被动检测方法[J]. 兵工学报, 2023, 44(7): 2114-2121.
WANG X M, YU H B, ZHANG X Y, et al. Underwater multi-target detection method based on Hough transform track-before-detect technique[J]. Acta Armamentarii, 2023, 44(7): 2114-2121.
|
| 20 |
马颂德, 张正友. 计算机视觉: 计算理论与算法基础[M]. 北京: 科学出版社, 1998: 52-73.
MA S D, ZHANG Z Y. Computer vision: fundamentals of computational theory and algorithms[M]. Beijing: Science Press, 1998: 52-73.
|
| 21 |
周爱国, 于江洋, 蒲家坤, 等. 基于加权Levenberg-Marquardt的多目视觉同名物点定位算法[J]. 激光与光电子学进展, 2021, 58(24): 351-359. doi:10.3788/lop202158.2415006
ZHOU A G, YU J Y, PU J K, et al. Positioning algorithm of homonymous object points in multi-vision system based on weighted Levenberg-Marquardt[J]. Laser & Optoelectronics Progress, 2021, 58(24): 351-359.
doi: 10.3788/lop202158.2415006
|
| 22 |
孔瑞金, 胡祥云, 蔡红柱. 基于Gramian约束与高斯-牛顿算法的重磁三维联合反演[J]. 地球物理学报, 2023, 66(8): 3493-3513.
KONG R J, HU X Y, CAI H Z. Three-dimensional joint inversion of gravity and magnetic data using Gramian constraints and Gauss-Newton method[J]. Chinese Journal of Geophysics, 2023, 66(8): 3493-3513.
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|