| 整机和系统设计 |
|

|
|
|
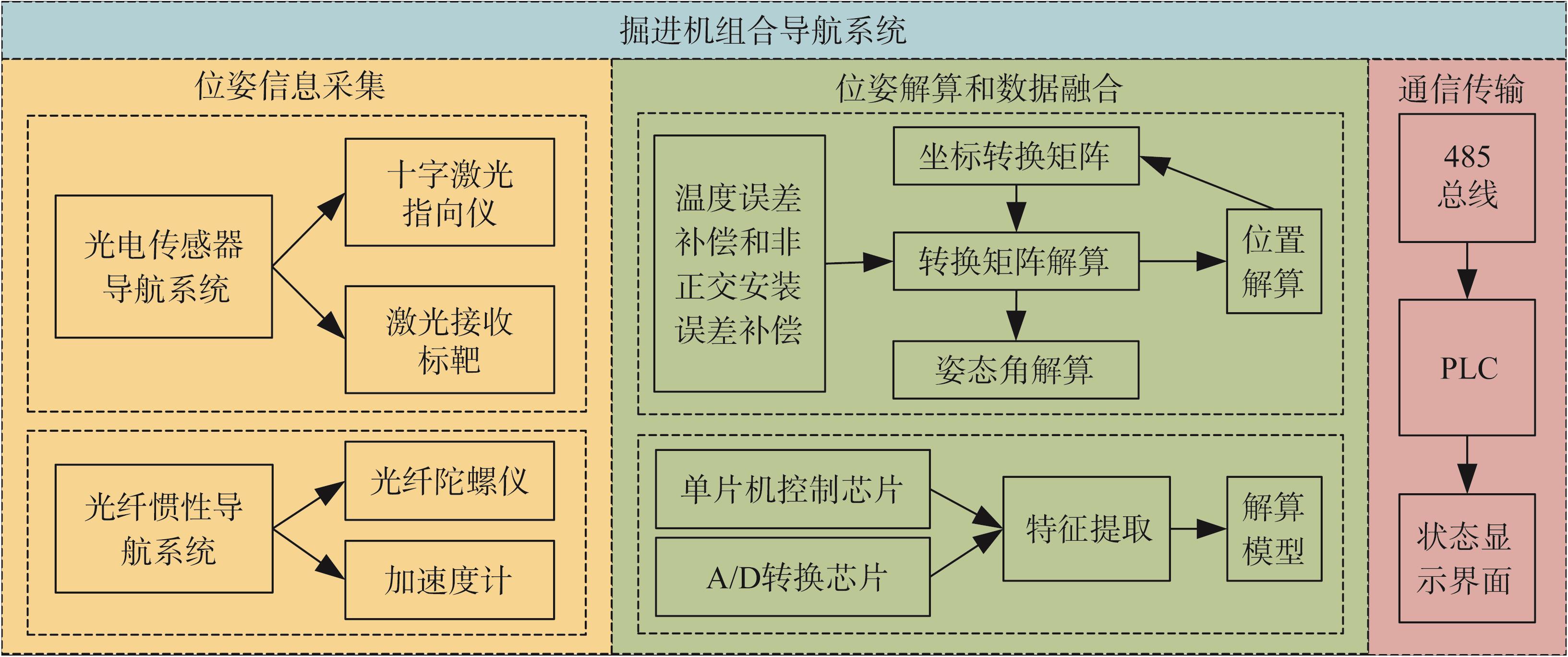
| 基于组合方式的掘进机导航系统研究 |
田立勇( ),孙业新,于宁,陈洪月,马春莹 ),孙业新,于宁,陈洪月,马春莹 |
| 辽宁工程技术大学 机械工程学院,辽宁 阜新 123000 |
|
| Research on navigation system of roadheader based on combination mode |
| Li-yong TIAN(),Ye-xin SUN,Ning YU,Hong-yue CHEN,Chun-ying MA |
| School of Mechanical Engineering,Liaoning Technical University,Fuxin 123000,China |
引用本文:
田立勇,孙业新,于宁,陈洪月,马春莹. 基于组合方式的掘进机导航系统研究[J]. 工程设计学报, 2022, 29(2): 254-262.
Li-yong TIAN,Ye-xin SUN,Ning YU,Hong-yue CHEN,Chun-ying MA. Research on navigation system of roadheader based on combination mode[J]. Chinese Journal of Engineering Design, 2022, 29(2): 254-262.
链接本文:
https://www.zjujournals.com/gcsjxb/CN/10.3785/j.issn.1006-754X.2022.00.024
或
https://www.zjujournals.com/gcsjxb/CN/Y2022/V29/I2/254
|
| 1 |
王国法,刘峰,孟祥军,等.煤矿智能化(初级阶段)研究与实践[J].煤炭科学技术,2019,47(8):1-36. doi:10.13199/j.cnki.cst.2019.08.001
WANG Guo-fa, LIU Feng, MENG Xiang-jun, et al. Research and practice on intelligent coal mine construction(primary stage)[J]. Coal Science and Technology, 2019, 47(8): 1-36.
doi: 10.13199/j.cnki.cst.2019.08.001
|
| 2 |
谢和平,王金华,王国法,等.煤炭革命新理念与煤炭科技发展构想[J].煤炭学报,2018,43(5):1187-1197. doi:10.13225/j.cnki.jccs.2018.0517
XIE He-ping, WANG Jin-hua, WANG Guo-fa, et al. New ideas of coal revolution and layout of coal science and technology development[J]. Journal of China Coal Society, 2018, 43(5): 1187-1197.
doi: 10.13225/j.cnki.jccs.2018.0517
|
| 3 |
王国法,杜毅博.智慧煤矿与智能化开采技术的发展方向[J].煤炭科学技术,2019,47(1):1-10. doi:10.13199/j.cnki.cst.2019.01.001
WANG Guo-fa, DU Yi-bo. Development direction of intelligent coal mine and intelligent mining technology [J]. Coal Science and Technology, 2019, 47(1): 1-10.
doi: 10.13199/j.cnki.cst.2019.01.001
|
| 4 |
王虹.我国综合机械化掘进技术发展40 a[J].煤炭学报,2010,35(11):1815-1820. doi:10.13225/j.cnki.jccs.2010.11.009
WANG Hong. The 40 years developmental review of the fully mechanized mine roadway heading technology in China[J]. Journal of China Coal Society, 2010, 35(11): 1815-1820.
doi: 10.13225/j.cnki.jccs.2010.11.009
|
| 5 |
张旭辉,赵建勋,杨文娟,等.悬臂式掘进机视觉导航与定向掘进控制技术[J].煤炭学报,2021,46(7):2186-2196. doi:10.13225/j.cnki.jccs.zn20.0357
ZHANG Xu-hui, ZHAO Jian-xun, YANG Wen-juan, et al. Vision-based navigation and directional heading control technologies of boom-type roadheader[J]. Journal of China Coal Society, 2021, 46(7): 2186-2196.
doi: 10.13225/j.cnki.jccs.zn20.0357
|
| 6 |
朱信平,李睿,高娟,等.基于全站仪的掘进机机身位姿参数测量方法[J].煤炭工程,2011(6):113-115. doi:10.3969/j.issn.1671-0959.2011.06.044
ZHU Xin-ping, LI Rui, GAO Juan, et al. The measurement method of body pose parameters of roadheader based on total station[J]. Coal Engineering, 2011(6): 113-115.
doi: 10.3969/j.issn.1671-0959.2011.06.044
|
| 7 |
杨文娟,张旭辉,马宏伟,等.悬臂式掘进机机身及截割头位姿视觉测量系统研究[J].煤炭科学技术,2019,47(6):50-57. doi:10.13199/j.cnki.cst.2019.06.008
YANG Wen-juan, ZHANG Xu-hui, MA Hong-wei, et al. Research on position and posture measurement system of body and cutting head for boom-type roadheader based on machine vision[J]. Coal Science and Technology, 2019, 47(6): 50-57.
doi: 10.13199/j.cnki.cst.2019.06.008
|
| 8 |
杜雨馨,刘停,童敏明,等.基于机器视觉的悬臂式掘进机机身位姿检测系统[J].煤炭学报,2016,41(11):2897-2906. doi:10.13225/j.cnki.jccs.2016.0397
DU Yu-xin, LIU Ting, TONG Min-ming, et al. Pose measurement system of boom-type roadheader based on machine vision[J]. Journal of China Coal Society, 2016, 41(11): 2897-2906.
doi: 10.13225/j.cnki.jccs.2016.0397
|
| 9 |
吴淼,贾文浩,华伟,等.基于空间交汇测量技术的悬臂式掘进机位姿自主测量方法[J].煤炭学报,2015,40(11):2596-2602. doi:10.13225/j.cnki.jccs.2015.7065
WU Miao, JIA Wen-hao, HUA Wei, et al. Autonomous measurement of position and attitude of boom-type roadheader based on space intersection measurement[J]. Journal of China Coal Society, 2015, 40(11): 2596-2602.
doi: 10.13225/j.cnki.jccs.2015.7065
|
| 10 |
张旭辉,赵建勋,张超,等.悬臂式掘进机视觉伺服截割控制系统研究[J].煤炭科学技术,2022,50(2):263-270. doi:10.13199/j.cnki.cst.2019-0628
ZHANG Xu-hui, ZHAO Jian-xun, ZHANG Chao, et al. Visual servo control system for cutting of boom-type roadheader[J]. Coal Science and Technology, 2022, 50(2): 263-270.
doi: 10.13199/j.cnki.cst.2019-0628
|
| 11 |
毛清华,张旭辉,马宏伟,等.多传感器信息的悬臂式掘进机空间位姿监测系统研究[J].煤炭科学技术,2018,46(12):41-47. doi:10.13199/j.cnki.cst.2018.12.007
MAO Qing-hua, ZHANG Xu-hui, MA Hong-wei, et al. Study on spatial position and posture monitoring system of boom-type roadheader based on multi sensor information[J]. Coal Science and Technology, 2018, 46(12): 41-47.
doi: 10.13199/j.cnki.cst.2018.12.007
|
| 12 |
HARGRAVE C O, JAMES C A, RALSTON J C. Infrastructure-based localisation of automated coal mining equipment[J]. International Journal of Coal Science & Technology, 2017, 4(3): 252-261. doi:10.1007/s40789-017-0180-3
doi: 10.1007/s40789-017-0180-3
|
| 13 |
李磊,肖世德,李兴坤,等.多传感器融合的智能车定位导航系统设计[J].工程设计学报,2019,26(2):182-189. doi:10.3785/j.issn.1006-754X.2019.02.009
LI Lei, XIAO Shi-de, LI Xing-kun, et al. Design of intelligent vehicle positioning navigation system with multi-sensor fusion[J]. Chinese Journal of Engineering Design, 2019, 26(2): 182-189.
doi: 10.3785/j.issn.1006-754X.2019.02.009
|
| 14 |
张博雅.多源辅助惯性导航系统算法研究[D].南京:南京理工大学,2019:10-12.
ZHANG Bo-ya. Algorithm research on multi-source aided inertial navigation system[D]. Nanjing: Nanjing University of Science and Technology, 2019: 10-12.
|
| 15 |
郭庆尧.激光标靶与捷联惯性导航系统组合位姿测量关键技术研究[D].天津:天津大学,2017:13-15.
GUO Qing-yao. Research on key technologies of the pose combination measurement system based on laser target and strapdown inertial navigation[D]. Tianjin: Tianjin University, 2017: 13-15.
|
| 16 |
张璞.煤矿井下移动机器人自主定位方法研究[D].西安:西安科技大学,2019:30-32.
ZHANG Pu. Research on autonomous positioning of coal mine mobile robot[D]. Xi’an: Xi’an University of Science and Technology, 2019: 30-32.
|
| 17 |
田粮川.基于捷联惯导的消防员运动位置检测研究[D].保定:河北大学,2018:30-31.
TIAN Liang-chuan. Research on location detection of firefighters based on strapdown inertial navigation[D]. Baoding: Hebei University, 2018: 30-31.
|
| 18 |
刘可.基于阵列天线的自适应波束形成算法研究[D].哈尔滨:哈尔滨工程大学,2018:22-25.
LIU Ke. Research on array antenna-based adaptive beamforming algorithm[D]. Harbin: Harbin Engineering University, 2018: 22-25.
|
| 19 |
余修武,范飞生,周利兴,等.无线传感器网络自适应预测加权数据融合算法[J].传感技术学报,2017,30(5):772-776. doi:10.3969/j.issn.1004-1699.2017.05.023
YU Xiu-wu, FAN Fei-sheng, ZHOU Li-xing, et al. Adaptive forecast weighting data fusion algorithm for wireless sensor network[J]. Chinese Journal of Sensors and Actuators, 2017, 30(5): 772-776.
doi: 10.3969/j.issn.1004-1699.2017.05.023
|
| 20 |
刘昊,陈光武,魏宗寿,等.改进的最小二乘自适应滤波陀螺仪去噪方法[J].仪器仪表学报,2018,39(4):107-114. doi:10.19650/j.cnki.cjsi.J1702823
LIU Hao, CHEN Guang-wu, WEI Zong-shou, et al. Gyro denoising method based on least squares adaptive filter[J]. Chinese Journal of Scientific Instrument, 2018, 39(4): 107-114.
doi: 10.19650/j.cnki.cjsi.J1702823
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|