

PMSM无传感器控制技术主要分为2个类别:基于凸极效应的高频注入法[3]和基于基波模型的反电动势方法[4]. 高频注入法适用于电机转子零速和低速运行工况,中高速运行时会产生显著干扰;基于基波模型的方法适用于转子中高速运行工况,主要包括模型参考自适应控制[5](model reference adaptive control, MRAC)、扩展卡尔曼滤波器[6](extended Kalman filter, EKF)、磁链观测器[7]和滑模观测器[8](sliding mode observer, SMO)等. 在基波模型技术中,MRAC参数自适应能力强、稳态性能优越,但高度依赖于参考模型与自适应律的设计;EKF具备自适应能力并可抑制观测误差,但计算复杂度高;磁链观测器结构简单、动态响应快,但参数鲁棒性不足. SMO结构简单、对参数扰动鲁棒性强,通过不连续开关特性驱动系统沿滑模轨迹运动[9]. 有诸多针对解决SMO抖振问题的改进策略被提出,如采用双曲正切函数结合模糊逻辑调节边界层[10],基于反电动势自适应调整增益[11],应用超扭曲算法(super-twisting algorithm, STA)以消除符号函数积分项[12],设计转速自适应超扭曲观测器[13]以及构建基于障碍函数的自适应观测器[14]等.
电压源逆变器(voltage source inverter, VSI)的非线性会导致输出电压失真,引起电流谐波与转矩波动,严重影响系统性能和观测精度[15]. 现有方法以电压前馈补偿为主,时间补偿法因实现复杂而应用较少[16]. 部分方法仅补偿死区效应,未涵盖导通压降、开关延迟因素[17]. 有研究者建立包含导通压降、开关延迟甚至寄生电容的精确模型[18-19],但模型依赖准确的器件参数[20]. 为了降低参数敏感性,有研究者采用电压扰动观测器[21]或谐波分离与PI控制[22]获取失真电压,但方法仍存在对电机参数变化适应不足或计算复杂的问题. 智能算法如神经网络与迭代学习虽具抗干扰性,却因计算量大而难以应用于工程实践[23]. 本研究针对PMSM无传感器控制性能提升,通过在超扭曲滑模观测器(ST-SMO)引入线性项增强收敛性,设计自适应滑模增益以改善宽速域性能,提出参数无关的VSI在线补偿方法,通过d轴谐波提取与在线优化提高信号质量,提升系统观测精度与运行性能.
1. 改进自适应超扭曲滑模观测器
PMSM在静止α、β坐标系中的电压方程为
式中:
式中:
1.1. 超扭曲滑模观测器
在二阶的滑模算法中,STA不仅控制效果优秀,而且在实现过程中获取的系统信息最少. 这意味着,在运用该算法时,不需要对系统进行过于复杂的分析或获取额外的数据,降低了控制的复杂度和成本. STA还能避免引入新的控制变量,简化了控制系统的设计,提高了系统的稳定性和可靠性. 算法计算式为
式中:
式中:
由式(5)可知,ST-SMO观测得到的扩展反电动势主要由2个关键的部分组成. 前一部分的表现形式与传统滑模控制中的反电动势相似,但它会随着电流误差的逐渐收敛而不断减小;后一部分是连续的积分项,在整个过程中发挥着不可或缺的作用. 与传统滑模观测器直接使用符号函数不同,ST-SMO通过积分项
1.2. 改进自适应超扭曲滑模观测器
相较于传统滑模观测器,ST-SMO可以有效抑制系统抖振现象,但是当系统受到干扰而偏离滑动面时,它无法快速返回滑动面. ST-SMO中的滑模增益系数为定值,较大的滑模增益系数适合电机高速运行的状态,电机低速运行状态可能会引起严重的抖振现象. 较小的滑模增益系数适合电机低速运行的状态,在高速时可能无法满足稳定性条件. 为了解决上述问题,引入线性项对传统的ST-SMO算法进行改进,加速系统状态在远离平衡点时的收敛速度. 为了提高滑模观测器在较宽速度范围内对电机转子角度以及速度的观测精度,提升系统的抗干扰能力,本研究制定根据电机转速大小对滑模增益系数进行实时调整的自适应律的策略,提出基于改进自适应ST-SMO(improved adaptive ST-SMO,IAST-SMO)的PMSM控制方法.
加入线性项改进后的STA的基本形式为
将PMSM在静止α、β坐标系下的电机定子电流
通过引入线性项
此时,IAST-SMO的干扰项应该满足
式中:
在实验过程中,初始化
为了让电机能够在宽转速范围内稳定运行,设计滑模增益系数随转速进行实时调整的自适应策略. 滑模增益系数与转速的关系式为
要使IAST-SMO稳定,滑模增益系数应满足
根据式(13)中推出的使IAST-SMO稳定的滑模增益系数限制条件,确定式(11)中的
1.3. 改进自适应超扭曲滑模观测器实验分析
如表1所示为PMSM实验用参数表,电机参数适用于微型PMSM(额定功率<100 W),符合IEC60034-1. 实验目标转速范围为[50,
表 1 PMSM实验用参数表
Tab.1
| 参数 | 数值 | 参数 | 数值 | |
| 额定电压/V | 24 | 极对数 | 2 | |
| 转动惯量/(kg·m2) | 相电阻/Ω | 7.25 | ||
| 永磁体磁链/Wb | 0.024 15 | 相电感/mH | 6.29 |
图 1
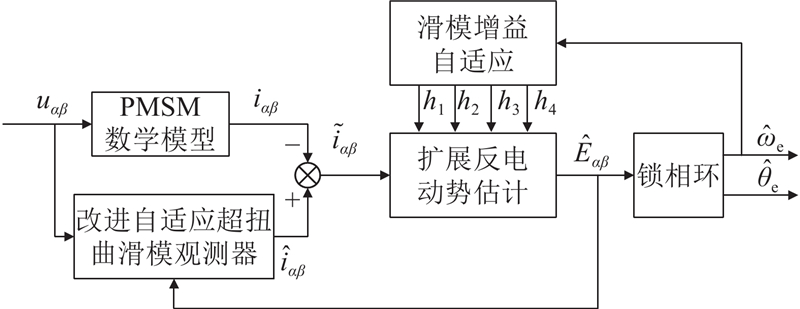
图 1 改进自适应超扭曲滑模观测器原理框图
Fig.1 Principle block diagram of improved adaptive super-twisting sliding mode observer
表 2 超扭曲滑模观测器对比实验的关键参数设置
Tab.2
| 控制方式 | 参数 |
| PI控制 | Kp_speed= |
| Kp_id=1.258,Ki_id= | |
| Kp_iq=1.408,Ki_iq= | |
| SMO | h=200 |
| AST-SMO | a1= |
| IAST-SMO | a1= |
在电机转速n=800、
图 2
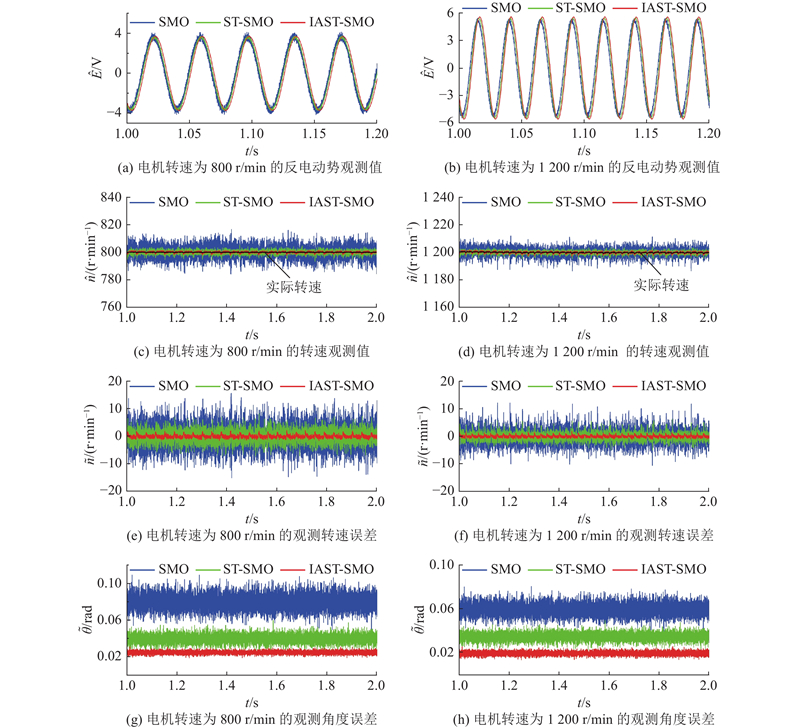
图 2 不同观测器在不同电机转速下的观测结果对比
Fig.2 Comparison of observation results for different observers at various motor speeds
表 3 不同观测器在不同电机转速下的观测性能参数比较
Tab.3
| n/(r·min−1) | 观测器 | ||||
| 800 | SMO | 15.1 | 29.5 | 0.110 | 0.110 |
| ST-SMO | 7.4 | 13.8 | 0.060 | 0.033 | |
| IAST-SMO | 2.1 | 4.5 | 0.030 | 0.012 | |
| SMO | 12.1 | 23.4 | 0.080 | 0.042 | |
| ST-SMO | 5.6 | 10.6 | 0.045 | 0.027 | |
| IAST-SMO | 1.9 | 3.7 | 0.025 | 0.009 |
图 3
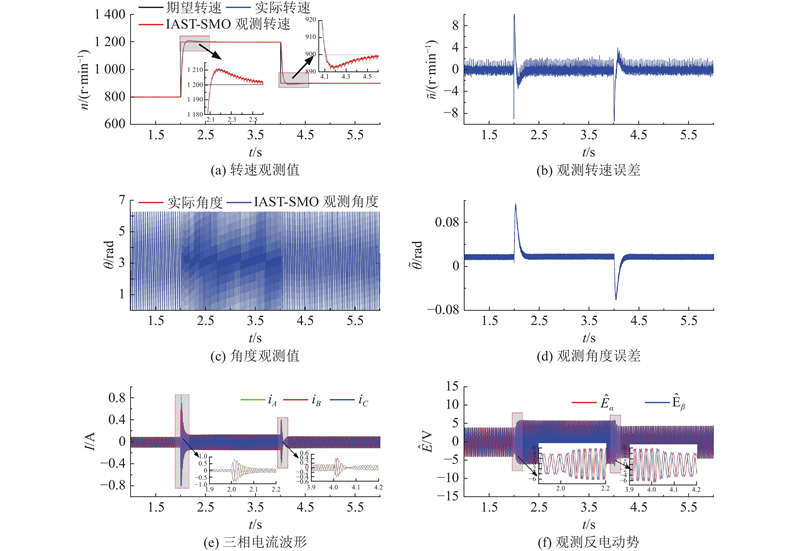
图 3 加减速工况下改进自适应超扭曲滑模观测器实验结果
Fig.3 Experimental results of improved adaptive super-twisting sliding mode observer under acceleration and deceleration conditions
图 4
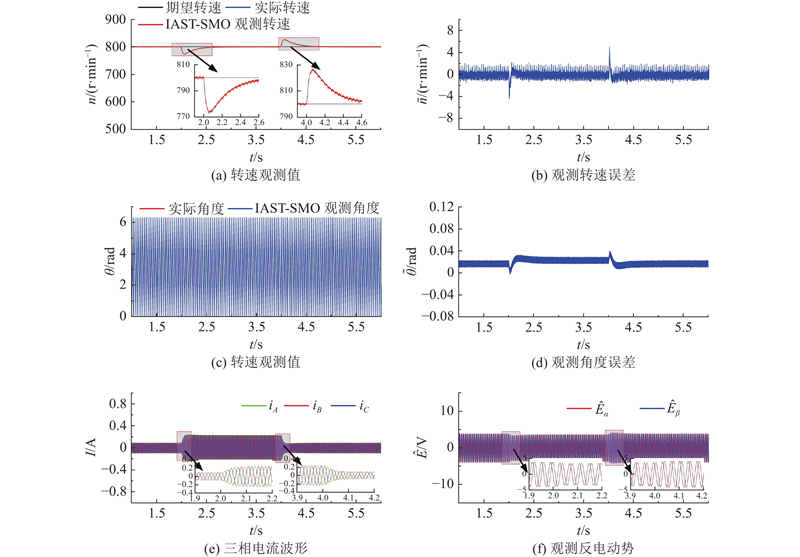
图 4 抗负载工况下改进自适应超扭曲滑模观测器实验结果
Fig.4 Experimental results of improved adaptive super-twisting sliding mode observer under load disturbance conditions
2. 在线电压源逆变器非线性效应补偿
IAST-SMO算法核心功能是通过测量得到的电机端电压uαβ和电流iαβ信号,实时估计转子位置和转速. 电压源逆变器固有的非线性效应会导致实际施加到电机端的电压与控制器输出的期望电压之间产生失真电压,使得IAST-SMO输入信号uαβ和iαβ产生失真电压和失真电流. 即使IAST-SMO通过引入线性项和自适应增益增强了鲁棒性,若输入信号含有VSI引入的谐波失真,观测器的高频切换特性会放大误差,导致转子位置和转速的估计精度下降. 在线VSI非线性补偿能够为IAST-SMO提供准确的输入信号. 本研究提出的在线VSI非线性补偿不依赖电机电阻R和电感Ld、Lq等参数,提取高频d轴电压分量来估计失真电压的幅值Vdead,并通过在线调整补偿量最小化|Fd|. 本研究未涵盖磁饱和以及逆变器非线性效应,但在实验中验证了补偿策略对某些未建模因素的鲁棒性.
2.1. 电压源逆变器非线性效应分析
如图5所示为VSI非线性效应影响的逆变器输出电压示意图. VSI的非线性效应主要由控制死区时间
图 5
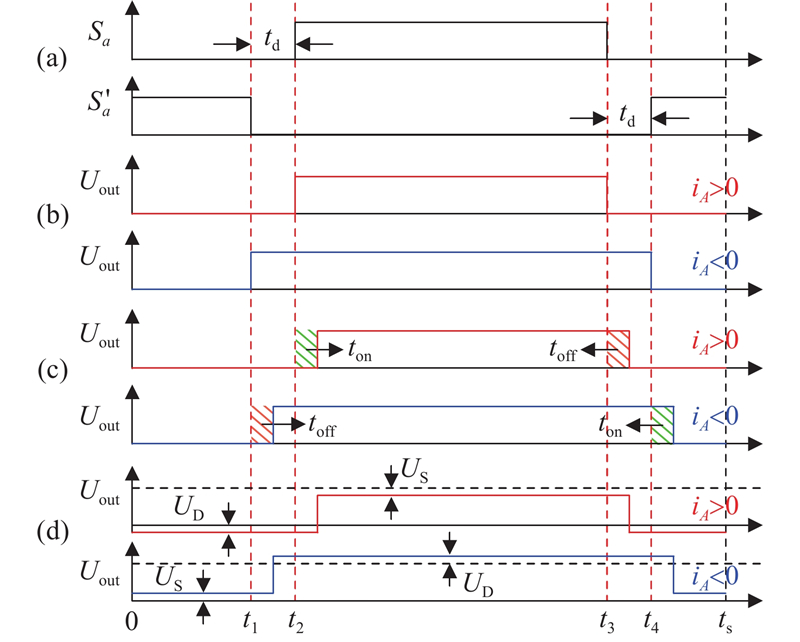
图 5 电压源逆变器非线性效应影响的输出电压
Fig.5 Output voltage affected by nonlinear effects of voltage source inverters
由于寄生电容的存在,存在导通以及关断延迟时间,在控制死区时间影响的基础上,考虑导通关断延迟时间,此时输出电压为式(18)所示. 在逆变器工作的过程中,开关管及其续流二极管均存在导通压降
式中:
2.2. 在线电压源逆变器非线性效应补偿策略
式(19)为A相桥臂在VSI非线性效应影响下所产生的失真电压,同理可以得到在三相自然坐标系下由VSI非线性效应在1个周期产生的三相电压失真大小:
将式(22)进行坐标变换,得到旋转坐标系下产生的失真电压为
根据式(23)所示,设
如图6所示为在
图 6
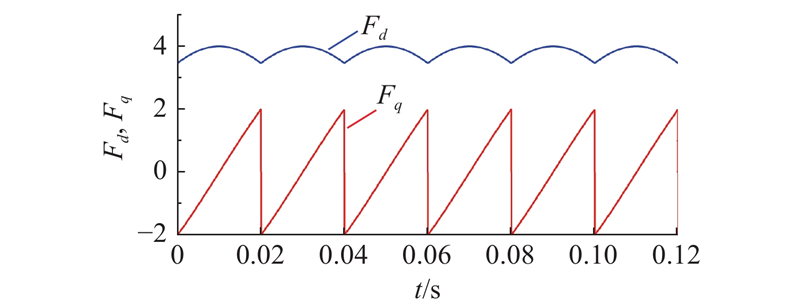
图 6 电流特性函数的模拟波形图
Fig.6 Simulation waveforms of current characteristic functions
图 7

图 8
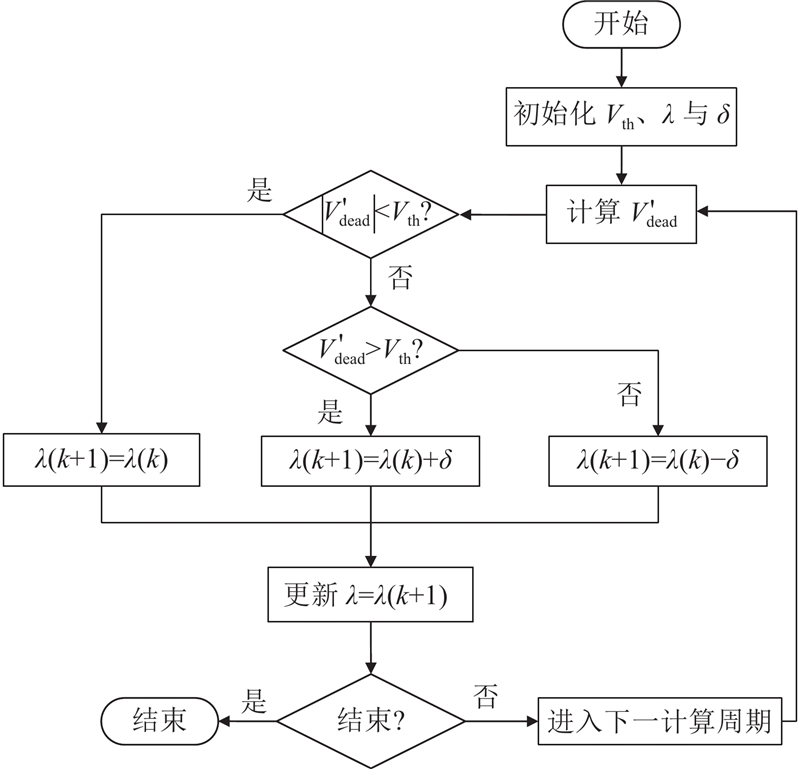
图 8 补偿后的失真电压值最小化流程图
Fig.8 Minimization flowchart of compensated distorted voltage
综上所述,本研究通过对d轴参考电压的高频分量进行提取,计算出失真电压幅值
2.3. 在线电压源逆变器非线性效应补偿策略实验分析
如图9所示为补偿前后的dq轴电流、三相电流以及A相电流谐波分析对比实验结果. 在未加入补偿算法之前,dq轴的电流中存在明显的6次谐波分量,在实施所提补偿算法之后,dq轴电流中的6次谐波分量大幅度减少. 可以看出,在实施所提补偿算法后,三相电流中的5、7次谐波分量明显减少,电流波形更接近正弦波. 由三相电流中的A相电流进行的谐波分析图可以观察到,在未进行补偿之前,三相电流的谐波失真为10.99%,其中5次谐波分量占比为8.52%,7次谐波分量占比为5.57%. 在加入在线VSI非线性效应补偿策略之后,总谐波失真则是减少到1.83%,相比于未加入补偿之前降低了83.3%. 其中5次谐波分量占比为0.31%,降低了约96.3%,7次谐波分量占比则减少到0.75%,降低了约86.5%,实现的电流THD低于2%,优于同类补偿方法报道的5%[24].
图 9
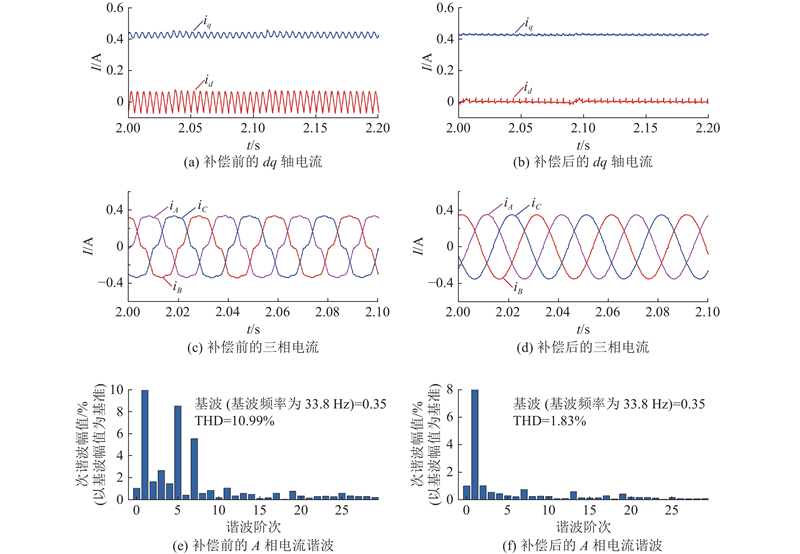
图 9
补偿策略实施前后主要电流指标对比(n=
Fig.9
Comparison of main current indexes before and after compensation strategy implementation (n=
如图10所示,基于IAST-SMO和逆变器非线性补偿的PMSM无传感器控制系统图由IAST-SMO、在线VSI非线性补偿以及磁场定向控制(field-oriented control,FOC)构成. IAST-SMO通过引入线性项以及参数自适应,融合了线性控制的快速响应特性和非线性滑模控制的鲁棒性,有效解决了传统ST-SMO在系统偏离滑模面时收敛慢、收敛速度与抖振抑制难以兼顾的矛盾. 基于VSI的非线性补偿策略不依赖电机参数,有效消除VSI非线性效应,为IAST-SMO提供更纯净的输入信号,形成对FOC的协同增效.
图 10
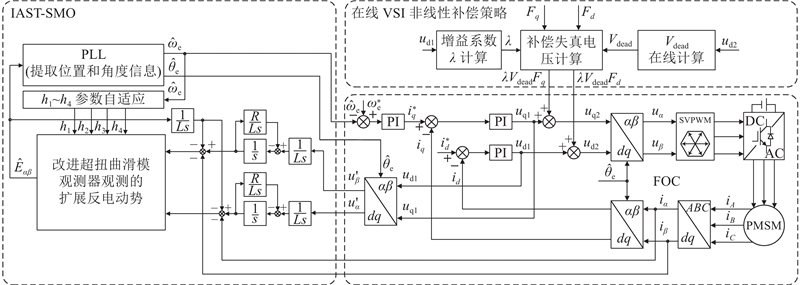
图 10 基于改进自适应超扭曲滑模观测器与逆变器非线性补偿的PMSM控制
Fig.10 PMSM control based on improved adaptive super-twisting sliding mode observer and inverter nonlinearity compensation
3. 综合实验结果
PMSM实验平台如图11所示,采用STM32F401RET6控制表面贴装式PMSM. 如图12所示为补偿前后的IAST-SMO对比实验结果. 在对VSI非线性效应进行补偿前,IAST-SMO观测的转速与实际转速之间最大转速误差约为5.8 r/min,转速波动约为9.5 r/min,在加入补偿算法对VSI非线性效应进行补偿之后,IAST-SMO的观测转速误差最大约为2.2 r/min,转速误差波动约为4.3 r/min. 相较于未加入补偿时的转速观测精度提高了大约55%. 补偿前的IAST-SMO观测角度误差最大值约为0.045 rad,误差波动为0.02 rad. 在实施所提补偿策略之后,观测转速误差最大值约为0.026 rad,转速误差波动约为0.011 rad,相比补偿前观测器对角度的估计精度大约约提升45%. 结合上述实验分析可知,在线VSI非线性补偿策略能够很大程度地减小相电流中由VSI非线性效应产生的5、7次谐波分量,有效提升IAST-SMO对电机转子转速和角度的观测精度.
图 11
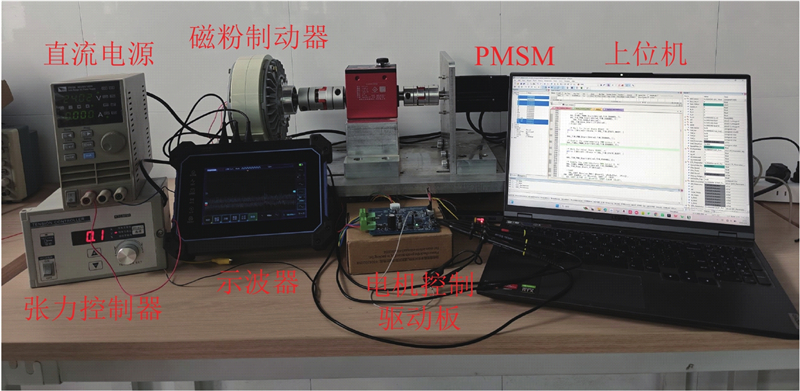
图 12
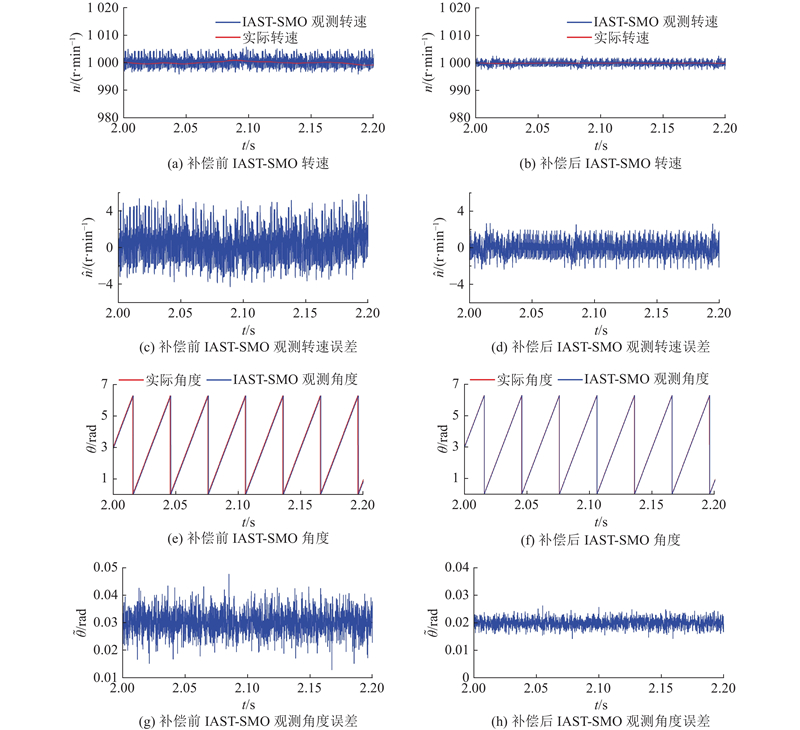
图 12 补偿策略实施前后改进自适应超扭曲滑模观测器的性能对比实验
Fig.12 Experimental results of improved adaptive super-twisting sliding mode observer before and after compensation strategy implementation
4. 结 语
本研究提出IAST-SMO与逆变器非线性补偿的PMSM无传感器控制策略. 通过在传统ST-SMO框架中引入线性项和滑模增益自适应算法,有效抑制了观测抖振;采用参数无关的VSI补偿策略构建精确的PMSM观测模型,显著增强了系统在复杂工况下的适应性与鲁棒性. 实验结果表明,相比现有STA-SMO无传感器技术,IAST-SMO与VSI非线性补偿方法不仅性能更优,而且结构简单、参数整定容易,具有较高的工程实现可行性. 本研究提出的PMSM无传感器控制方法基于机器模型设计,在超低速及零速工况下可观测性不足,限制了其在全速域的适用性. 未来工作将重点研究磁饱和效应下的电机参数自适应辨识技术,并将其集成到IAST-SMO框架中,提升在深度弱磁和饱和工况下的鲁棒性与精度,为实现全速域高性能无传感器运行奠定基础.
参考文献
Development of enhanced direct torque control for surface-mounted permanent magnet synchronous motor drive operation
[J].DOI:10.1049/pel2.12504 [本文引用: 1]
A novel duty-controlled DTC of a surface PMSM drive with reduced torque and flux ripples
[J].DOI:10.1109/TIE.2022.3181405 [本文引用: 1]
A novel field-oriented control algorithm for permanent magnet synchronous motors in 60° coordinate systems
[J].DOI:10.3390/act12020092 [本文引用: 1]
A simple tuning method of PI regulators in FOC for PMSM drives based on deadbeat predictive conception
[J].DOI:10.1109/TTE.2024.3385114 [本文引用: 1]
Position sensorless control for PMSM drives with single current sensor
[J].DOI:10.1109/TIE.2022.3148748 [本文引用: 1]
An online compensation method of VSI nonlinearity for dual three-phase PMSM drives using current injection
[J].DOI:10.1109/TPEL.2021.3127990 [本文引用: 1]
Parameter and VSI nonlinearity hybrid estimation for PMSM drives based on recursive least square
[J].DOI:10.1109/TTE.2022.3206606 [本文引用: 1]
Position sensorless permanent magnet synchronous machine drives: a review
[J].DOI:10.1109/TIE.2019.2955409 [本文引用: 1]
High-frequency injection angle self-adjustment based online position error suppression method for sensorless PMSM drives
[J].DOI:10.1109/TPEL.2022.3210105 [本文引用: 1]
Sensorless control of IPMSM based on super-twisting sliding mode observer with CVGI considering flying start
[J].DOI:10.1109/TTE.2021.3131860 [本文引用: 1]
A power-RPM reduced-order model and power control strategy of the dual three-phase permanent magnet synchronous motor in a V/f framework for oscillation suppression
[J].DOI:10.3390/en17184563 [本文引用: 1]
High performance sensor-less V/f control of surface PMSM in voltage vector plane with ZVV injection and SMO-based position estimation method
[J].DOI:10.1007/s00202-021-01325-2 [本文引用: 1]
An efficient and robust I-f control of sensorless IPMSM with large startup torque based on current vector angle controller
[J].DOI:10.1109/TPEL.2022.3193565 [本文引用: 1]
An improved sensorless hybrid control method of permanent magnet synchronous motor based on I/F startup
[J].DOI:10.3390/s23020635 [本文引用: 1]
Transducerless position and velocity estimation in induction and salient AC machines
[J].DOI:10.1109/28.370269 [本文引用: 1]
Square-wave voltage injection based PMSM sensorless control considering time delay at low switching frequency
[J].DOI:10.1109/TIE.2021.3094444 [本文引用: 1]
A novel nonsingular fast terminal sliding mode observer combining I-F method for wide-speed sensorless control of PMSM drives
[J].DOI:10.1049/pel2.12427 [本文引用: 1]
Modified active-power MRAS based adaptive control with reduced sensors for PMSM operated solar water pump
[J].DOI:10.1109/TEC.2022.3197564 [本文引用: 1]
Speed sensorless control for IPMSMs using a modified MRAS with gray wolf optimization algorithm
[J].DOI:10.1109/TTE.2021.3093580 [本文引用: 1]
Using a bivariate polynomial in an EKF for state and inductance estimations in the presence of saturation effects to adaptively control a PMSM
[J].DOI:10.1109/ACCESS.2022.3215511 [本文引用: 1]
EKF-based fault detection and isolation for PMSM inverter
[J].DOI:10.1016/j.seta.2021.101846 [本文引用: 1]
Sensorless control of surface-mounted permanent magnet synchronous motor using adaptive robust UKF
[J].DOI:10.1007/s42835-022-01061-y [本文引用: 1]
Flux observer based on enhanced second-order generalized integrator with limit cycle oscillator for sensorless PMSM drives
[J].DOI:10.1109/TPEL.2023.3314009 [本文引用: 1]
A polar-coordinate-multisignal-flux-observer-based PMSM non-PLL sensorless control
[J].DOI:10.1109/TPEL.2023.3289095 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}