[1]
LI X Z, CHEN Z J, FAN X C, et al Hydropower development situation and prospects in China
[J]. Renewable and Sustainable Energy Reviews , 2018 , 82 : 232 - 239
DOI:10.1016/j.rser.2017.08.090
[本文引用: 1]
[2]
GAO Y, LIU X, HUANG H, et al A hybrid of FEM simulations and generative adversarial networks to classify faults in rotor-bearing systems
[J]. ISA Transactions , 2021 , 108 : 356 - 366
DOI:10.1016/j.isatra.2020.08.012
[本文引用: 1]
[3]
XIONG H, EGUSQUIZA M, ØSTERGAARD P A, et al Multi-objective optimization of a hydro-wind-photovoltaic power complementary plant with a vibration avoidance strategy
[J]. Applied Energy , 2021 , 301 : 117459
DOI:10.1016/j.apenergy.2021.117459
[4]
KUZNETSOV N V, YULDASHEV M V, YULDASHEV R V Analytical-numerical analysis of closed-form dynamic model of Sayano-Shushenskaya hydropower plant: stability, oscillations, and accident
[J]. Communications in Nonlinear Science and Numerical Simulation , 2021 , 93 : 105530
DOI:10.1016/j.cnsns.2020.105530
[5]
ZHANG H, GUO P, SUN L Transient analysis of a multi-unit pumped storage system during load rejection process
[J]. Renewable Energy , 2020 , 152 : 34 - 43
DOI:10.1016/j.renene.2019.12.111
[6]
张雷克, 张金剑, 王雪妮, 等 水电机组转子-转轮弯扭耦合振动特性分析
[J]. 水力发电学报 , 2021 , 40 (9 ): 102 - 112
DOI:10.11660/slfdxb.20210911
ZHANG Leike, ZHANG Jinjian, WANG Xueni, et al Analysis on coupled bending-torsional vibration behaviors of rotor-runner system of hydropower units
[J]. Journal of Hydroelectric Engineering , 2021 , 40 (9 ): 102 - 112
DOI:10.11660/slfdxb.20210911
[7]
YAN D, ZHENG Y, LIU W, et al. Interval uncertainty analysis of vibration response of hydroelectric generating unit based on Chebyshev polynomial [J]. Chaos, Solitons and Fractals , 2022, 155: 111712.
[本文引用: 1]
[8]
MOHANTA R K, CHELLIAH T R, ALLAMSETTY S, et al Sources of vibration and their treatment in hydro power stations: a review
[J]. Engineering Science and Technology, an International Journal , 2017 , 20 (2 ): 637 - 648
DOI:10.1016/j.jestch.2016.11.004
[本文引用: 1]
[9]
GUO W, ZHU D A review of the transient process and control for a hydropower station with a super long headrace tunnel
[J]. Energies , 2018 , 11 (11 ): 2994
DOI:10.3390/en11112994
[本文引用: 1]
[10]
ZHONG W M, ZHU A D, BAI X F, et al Integrated shock absorber with both tunable inertance and damping
[J]. Frontiers in Materials , 2020 , 7 : 204
DOI:10.3389/fmats.2020.00204
[本文引用: 1]
[11]
M’ZOUGHI F, BOUALLÈGUE S, GARRIDO A J, et al Stalling-free control strategies for oscillating-water-column-based wave power generation plants
[J]. IEEE Transactions on Energy Conversion , 2018 , 33 (1 ): 209 - 222
DOI:10.1109/TEC.2017.2737657
[12]
ASGHARI H, MILLER L, PENTA R, et al On an isotropic porous solid cylinder: the analytical solution and sensitivity analysis of the pressure
[J]. Applied Mathematics and Mechanics: English Edition , 2024 , 45 (9 ): 1499 - 1522
DOI:10.1007/s10483-024-3144-7
[本文引用: 1]
[13]
HU G, YING S, QI H, et al Design, analysis and optimization of a hybrid fluid flow magnetorheological damper based on multiphysics coupling model
[J]. Mechanical Systems and Signal Processing , 2023 , 205 : 110877
DOI:10.1016/j.ymssp.2023.110877
[本文引用: 1]
[15]
ZHANG L, TANG H, SUN T, et al. Vibration characteristics analysis of shaft system for bulb hydroelectric generating unit based on magnetorheological fluid damper [J]. Chaos, Solitons and Fractals , 2022, 163: 112559.
[本文引用: 2]
[16]
ZHANG J, MA Z, WANG X, et al Vibration control on coupled unit-plant structure of pumped storage power station during sudden load-up process
[J]. Mechanical Systems and Signal Processing , 2024 , 212 : 111333
DOI:10.1016/j.ymssp.2024.111333
[本文引用: 1]
[17]
ZAPOMĚL J, FERFECKI P, KOZÁNEK J Modelling of magnetorheological squeeze film dampers for vibration suppression of rigid rotors
[J]. International Journal of Mechanical Sciences , 2017 , 127 : 191 - 197
DOI:10.1016/j.ijmecsci.2016.11.009
[本文引用: 1]
[19]
ZHANG J, ZHANG L, MA Z, et al. Coupled bending-torsional vibration analysis for rotor-bearing system with rub-impact of hydraulic generating set under both dynamic and static eccentric electromagnetic excitation[J]. Chaos, Solitons and Fractals , 2021, 147: 110960.
[本文引用: 1]
[20]
XU B, CHEN D, PATELLI E, et al Mathematical model and parametric uncertainty analysis of a hydraulic generating system
[J]. Renewable Energy , 2019 , 136 : 1217 - 1230
DOI:10.1016/j.renene.2018.09.095
[21]
ZHANG L, WU Q, MA Z, et al Transient vibration analysis of unit-plant structure for hydropower station in sudden load increasing process
[J]. Mechanical Systems and Signal Processing , 2019 , 120 : 486 - 504
DOI:10.1016/j.ymssp.2018.10.037
[本文引用: 1]
[22]
NOSSENT J, ELSEN P, BAUWENS W Sobol’ sensitivity analysis of a complex environmental model
[J]. Environmental Modelling and Software , 2011 , 26 (12 ): 1515 - 1525
DOI:10.1016/j.envsoft.2011.08.010
[本文引用: 1]
[23]
WANG Q, LI H, LU L, et al Global sensitivity analysis of Earth-Moon transfer orbit parameters based on sobol method
[J]. International Journal of Aerospace Engineering , 2022 , 2022 (1 ): 6587890
DOI:10.1155/2022/6587890
[本文引用: 1]
[24]
张强, 缪维跑, 刘青松, 等 基于Sobol指数的翼型动态失速优化全局敏感性分析
[J]. 工程热物理学报 , 2025 , 46 (2 ): 402 - 409
ZHANG Qiang, MIAO Weipao, LIU Qingsong, et al A global sensitivity analysis for airfoil dynamic stall optimization based on the sobol index
[J]. Journal of Engineering Thermophysics , 2025 , 46 (2 ): 402 - 409
[25]
何旸, 程麒铭, 苏义鸿, 等 基于参数全局敏感性分析的LID设施空间布局优化研究
[J]. 水资源保护 , 2025 , 41 (3 ): 194 - 203
[本文引用: 1]
HE Yang, CHENG Qiming, SU Yihong, et al Research on spatial layout optimization of LID facilities based on global sensitivity analysis of parameters
[J]. Water Resources Protection , 2025 , 41 (3 ): 194 - 203
[本文引用: 1]
[26]
张解生, 许贝贝, 陈帝伊, 等 水力机组系统参数全局敏感性分析
[J]. 水力发电学报 , 2019 , 38 (4 ): 146 - 159
DOI:10.11660/slfdxb.20190414
[本文引用: 1]
ZHANG Jiesheng, XU Beibei, CHEN Diyi, et al Global sensitivity analysis of hydro power generator unit system
[J]. Journal of Hydroelectric Engineering , 2019 , 38 (4 ): 146 - 159
DOI:10.11660/slfdxb.20190414
[本文引用: 1]
[27]
许贝贝. 水力发电机组系统可靠性与多能互补综合性能研究 [D]. 杨凌: 西北农林科技大学, 2020.
[本文引用: 1]
XU Beibei. Reliability and comprehensive performance of a hydroelectric generating system with multi-energy complementary [D]. Yangling: Northwest A&F University, 2020.
[本文引用: 1]
[28]
SAKAI C, OHMORI H, SANO A. Modeling of MR damper with hysteresis for adaptive vibration control [C]// Proceedings of the 42nd IEEE International Conference on Decision and Control . Maui: IEEE, 2004: 3840–3845.
[本文引用: 1]
[29]
HOU L, CHEN H, CHEN Y, et al Bifurcation and stability analysis of a nonlinear rotor system subjected to constant excitation and rub-impact
[J]. Mechanical Systems and Signal Processing , 2019 , 125 : 65 - 78
DOI:10.1016/j.ymssp.2018.07.019
[本文引用: 1]
[30]
WANG J, MENG G Experimental study on stability of an MR fluid damper-rotor-journal bearing system
[J]. Journal of Sound and Vibration , 2003 , 262 (4 ): 999 - 1007
DOI:10.1016/S0022-460X(03)00019-1
[本文引用: 1]
[31]
吴杨俊, 徐翠强, 陈杰, 等 内燃动力包隔振参数灵敏度分析及优化设计
[J]. 中南大学学报: 自然科学版 , 2021 , 52 (11 ): 3872 - 3884
DOI:10.11817/j.issn.1672-7207.2021.11.010
[本文引用: 1]
WU Yangjun, XU Cuiqiang, CHEN Jie, et al Sensitivity analysis and optimization design of parameters of vibration isolation for power pack
[J]. Journal of Central South University: Science and Technology , 2021 , 52 (11 ): 3872 - 3884
DOI:10.11817/j.issn.1672-7207.2021.11.010
[本文引用: 1]
[32]
VAN GRIENSVEN A, MEIXNER T, GRUNWALD S, et al A global sensitivity analysis tool for the parameters of multi-variable catchment models
[J]. Journal of Hydrology , 2006 , 324 (1/2/3/4 ): 10 - 23
DOI:10.1016/j.jhydrol.2005.09.008
[本文引用: 1]
[33]
SOBOL’ I M Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates
[J]. Mathematics and Computers in Simulation , 2001 , 55 (1/2/3 ): 271 - 280
DOI:10.1016/s0378-4754(00)00270-6
[本文引用: 1]
[34]
ZHANG J, MA Z, WANG X, et al The stability analysis and nonlinear vibration control of shaft system for hydraulic generating set under multi-source excitation considering effects of dynamic and static eccentricities
[J]. Communications in Nonlinear Science and Numerical Simulation , 2023 , 121 : 107230
DOI:10.1016/j.cnsns.2023.107230
[本文引用: 1]
Hydropower development situation and prospects in China
1
2018
... 水轮发电机组是水电生产的核心设备,其稳定运行是水电站安全生产、提供高质量供电的重要保障[1 ] . 普遍存在于水轮发电机组中的振动问题,具有引发轴系碰摩和失稳故障的风险,严重威胁着旋转机械安全稳定运行. ...
A hybrid of FEM simulations and generative adversarial networks to classify faults in rotor-bearing systems
1
2021
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Multi-objective optimization of a hydro-wind-photovoltaic power complementary plant with a vibration avoidance strategy
0
2021
Analytical-numerical analysis of closed-form dynamic model of Sayano-Shushenskaya hydropower plant: stability, oscillations, and accident
0
2021
Transient analysis of a multi-unit pumped storage system during load rejection process
0
2020
水电机组转子-转轮弯扭耦合振动特性分析
0
2021
水电机组转子-转轮弯扭耦合振动特性分析
0
2021
1
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Sources of vibration and their treatment in hydro power stations: a review
1
2017
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
A review of the transient process and control for a hydropower station with a super long headrace tunnel
1
2018
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Integrated shock absorber with both tunable inertance and damping
1
2020
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Stalling-free control strategies for oscillating-water-column-based wave power generation plants
0
2018
On an isotropic porous solid cylinder: the analytical solution and sensitivity analysis of the pressure
1
2024
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Design, analysis and optimization of a hybrid fluid flow magnetorheological damper based on multiphysics coupling model
1
2023
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
基于MRD的水轮发电机组轴系非线性振动控制
1
2020
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
基于MRD的水轮发电机组轴系非线性振动控制
1
2020
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
2
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
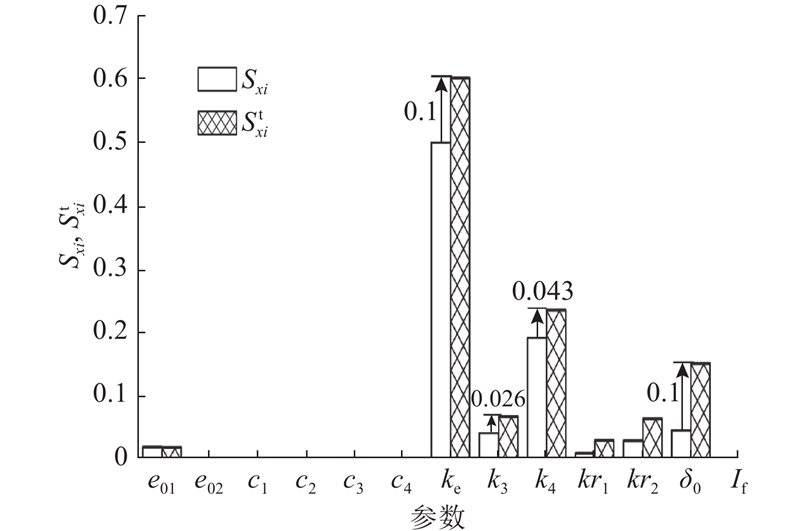
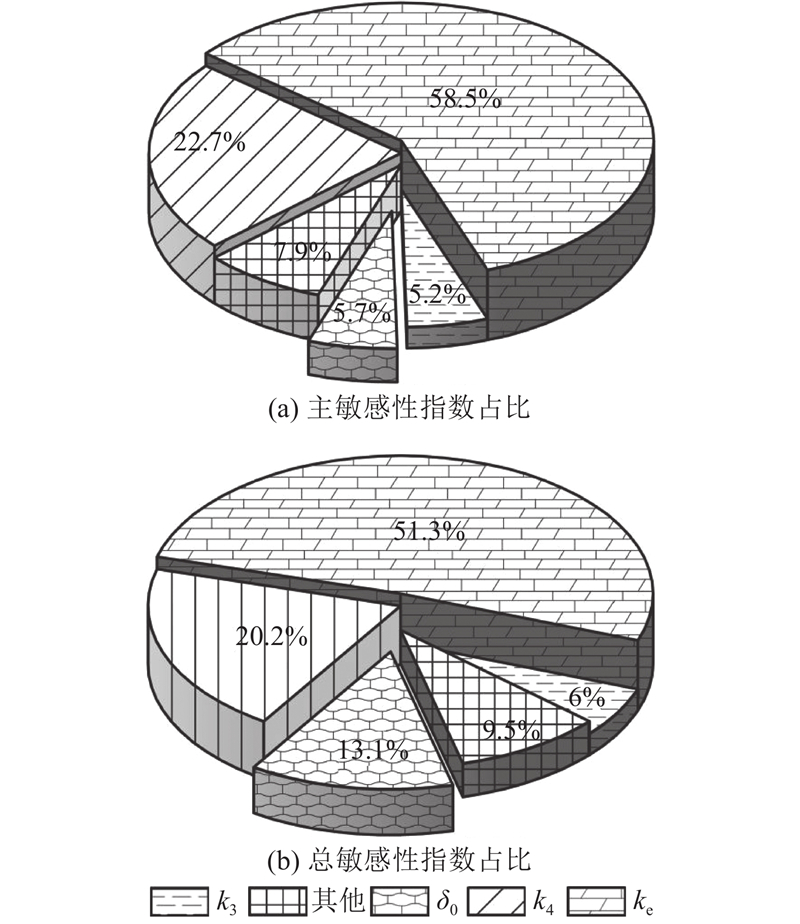
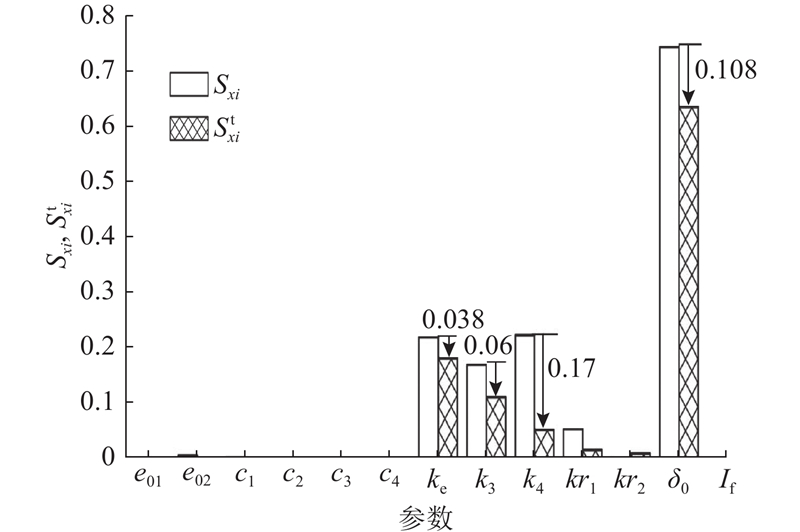
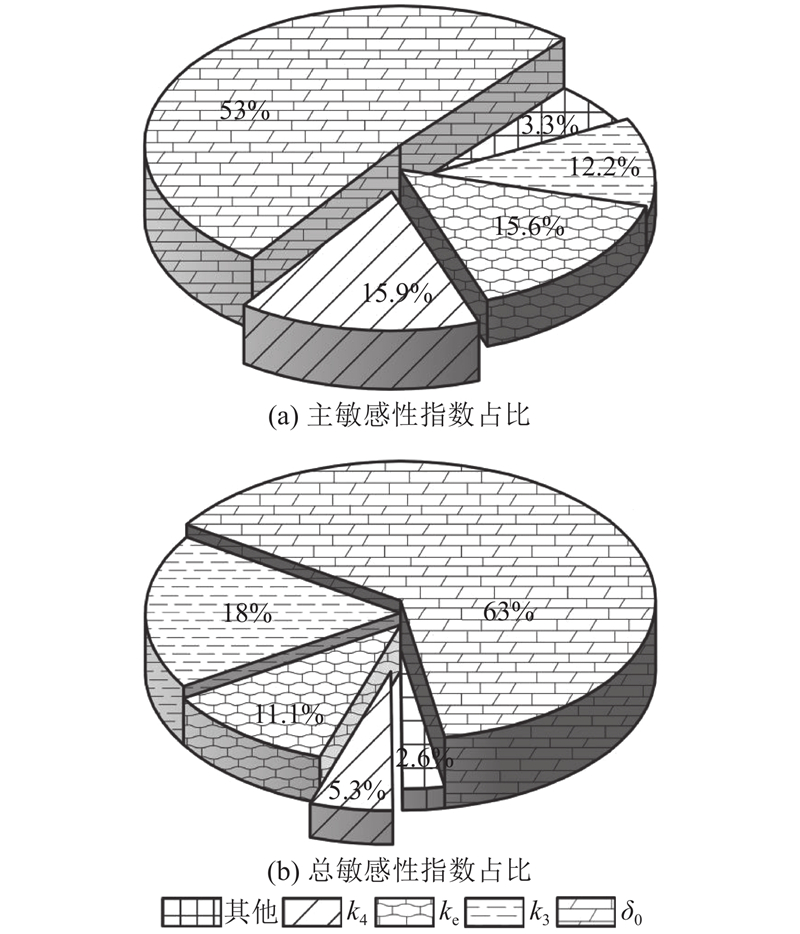
... 将抽样数设为2 000,以加装有MRD的灯泡贯流式水轮发电机组轴系转子在X 、Y 方向上的振幅为响应指标. 主敏感性指数S xi i 个参数独立变化时对系统响应的影响,总敏感性指数$ {S}_{xi}^{\mathrm{t}} $ i 个参数对系统响应的总影响. 针对在运行过程中受到水力、机械、电力荷载作用的水力发电机组轴系,对涵盖阻尼、刚度、电磁等因素在内的13个机组参数开展敏感性分析,机组实际参数取值参考文献[15 ],具体参数及取值范围如表2 所示. ...
Vibration control on coupled unit-plant structure of pumped storage power station during sudden load-up process
1
2024
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Modelling of magnetorheological squeeze film dampers for vibration suppression of rigid rotors
1
2017
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
磁流变液阻尼器-转子-滑动轴承系统稳定性实验研究
1
2003
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
磁流变液阻尼器-转子-滑动轴承系统稳定性实验研究
1
2003
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
1
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Mathematical model and parametric uncertainty analysis of a hydraulic generating system
0
2019
Transient vibration analysis of unit-plant structure for hydropower station in sudden load increasing process
1
2019
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Sobol’ sensitivity analysis of a complex environmental model
1
2011
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
Global sensitivity analysis of Earth-Moon transfer orbit parameters based on sobol method
1
2022
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
基于Sobol指数的翼型动态失速优化全局敏感性分析
0
2025
基于Sobol指数的翼型动态失速优化全局敏感性分析
0
2025
基于参数全局敏感性分析的LID设施空间布局优化研究
1
2025
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
基于参数全局敏感性分析的LID设施空间布局优化研究
1
2025
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
水力机组系统参数全局敏感性分析
1
2019
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
水力机组系统参数全局敏感性分析
1
2019
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
1
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
1
... 相关学者开展了多维振动特性研究,针对不同类型水轮机及外部荷载情况,建立物理模型,并采用多种分析手段进行深入研究[2 -7 ] . 部分学者逐渐将研究重点由系统动力特性辨识转向振动控制领域[8 -9 ] . 为了实现振动的有效控制,相关从业人员采取了改进机组结构、应用先进故障诊断技术以及优化参数设置等一系列措施[10 -12 ] . 水轮发电机组轴系系统复杂,其结构的固定性和工况的多样性使得上述措施在实践中往往难以充分发挥预期效果. 将振动控制手段聚焦于可适应不同工作条件和系统变化,易于应用和维护的外加智能减振装置成为本领域的研究热点. 磁流变液阻尼器(magnetorheological fluid damper, MRD)是可在外部磁场作用下,使内部流体能迅速转化为半固体从而产生阻尼力的新型机械,1948年在离合器结构领域得以应用[13 ] . 诸多学者致力于建立适配不同结构的MRD模型,并陆续将其应用于土木工程、透平机械、悬挂系统等领域. 孙万泉等[14 ] 不但将MRD表达式与水轮发电机组运动方程结合,而且证明了MRD对转子、转轮振幅和拟周期运动具有卓越的抑制效果. Zhang等[15 ] 发现MRD能显著改善灯泡式水电发电机组的非线性动力学特性,使系统响应更加有序. MRD可减缓因转速和质量偏心变化产生的振动,使系统趋向同步周期运动形式. Zhang等[16 ] 开展抽水蓄能电站在发电增负荷过程中的动态特性研究,发现MRD能够优化转子、转轮运动模式,降低频谱频率幅度. 加装振动抑制装置后,在水力、机械、电气等多重荷载作用下,水电机组轴系展现出更为复杂的动力特性. Zapoměl等[17 ] 发现MRD虽实现了减振预期,但会使转子系统碰摩形式发生改变,并在某些条件下增强系统的非线性,产生非协调频率成分,令系统稳定性降低. 汪建晓等[18 ] 通过实验发现,MRD在大幅提高转子系统临界转速的同时,增加了油膜失稳的风险. 可以看出,尽管MRD的存在对旋转轴系部件非稳态运动有着卓著的约束效果,但其加入将有可能令原系统结构表现出难以预见的动态响应形式. 机组轴系设计参数设置同样是影响振动响应情况和能效输出的重要因素[19 -21 ] . 增设外加减振设备的水电机组轴系,其参数优化的高维、多模态、非线性问题或将被进一步凸显. 实现系统参数优化多是通过经验估计,据此难以确保准确性和结果可信度;采用数值模拟方法逐一优化参数设定,将削弱模型计算效率和研究应用效果[22 ] . 若能准确获悉对机组部件振动情况影响较大的参数,开展针对性的动态响应分析,将大幅提升参数整定效率. 敏感性分析方法通过分析参数在设计空间内的变化,实现模型参数对响应输出影响的量化,识别并固定对输出影响较小的参数,仅校准对输出影响显著的参数. 该方法已被广泛应用于航天技术、水资源优化领域[23 -25 ] . 在水电机组研究方面,张解生等[26 ] 使用扩展傅里叶幅度敏感性分析(extended fourier amplitude sensitivity test, EFAST)方法对连接水电调节系统和机械子系统模型中的参数进行敏感性分析,确定了对发电机角速度和转子质心偏移影响程度较高的敏感参数. 许贝贝[27 ] 在考虑水力发电机组-调节系统耦合模型参数不确定性问题的基础上,分析得出不同工况下的模型参数敏感性排序. 敏感性分析方法实现了参数的降维,为机组优化设计和提升系统运行安全性提供了重要依据. ...
1
... Sakai等[28 ] 对传统的LuGre动力学模型加以简化,将MRD非线性阻尼器阻尼力表示为 ...
Bifurcation and stability analysis of a nonlinear rotor system subjected to constant excitation and rub-impact
1
2019
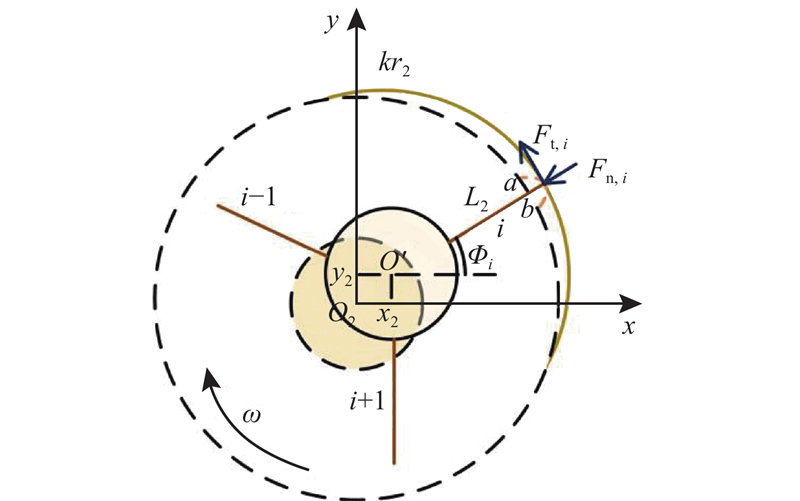
... 将转轮室机壳假定为刚性支撑,叶片为均质刚性悬臂梁. 考虑到机组低速工况成热特性及MRD的宽温域稳定性,忽略摩擦产生的热效应[29 -30 ] ,将形变视为线性,此时碰摩力被简化至沿叶片轴向和径向. 如图3 所示为转轮叶尖碰摩力示意图,点a 为叶片与转轮室壳体发生接触的位置,点b 为碰摩结束处. 当碰摩发生时,叶尖侵入壳体内部,产生的径向接触力F n,i 和切向摩擦力F t,i 的表达式分别为 ...
Experimental study on stability of an MR fluid damper-rotor-journal bearing system
1
2003
... 将转轮室机壳假定为刚性支撑,叶片为均质刚性悬臂梁. 考虑到机组低速工况成热特性及MRD的宽温域稳定性,忽略摩擦产生的热效应[29 -30 ] ,将形变视为线性,此时碰摩力被简化至沿叶片轴向和径向. 如图3 所示为转轮叶尖碰摩力示意图,点a 为叶片与转轮室壳体发生接触的位置,点b 为碰摩结束处. 当碰摩发生时,叶尖侵入壳体内部,产生的径向接触力F n,i 和切向摩擦力F t,i 的表达式分别为 ...
内燃动力包隔振参数灵敏度分析及优化设计
1
2021
... 采用Sobol全局敏感性分析方法,对安装有MRD的水电机组轴系部件的振动情况进行分析. 在应用于无确定函数表达的多参数动力学系统时,与其他全局敏感性分析方法(如EFAST、 Morris)相比,Sobol方法具有求解效率较高,应用范围广、针对非线性耦合系统分析结果精准度高等优点[31 ] . 该方法基于方差分解原理,通过二次采样矩阵显示分离主敏感性、总敏感性并清晰地体现参数的交互效应,对于参数在15~20维的非线性耦合系统中具有更高的稳健性[32 ] . ...
内燃动力包隔振参数灵敏度分析及优化设计
1
2021
... 采用Sobol全局敏感性分析方法,对安装有MRD的水电机组轴系部件的振动情况进行分析. 在应用于无确定函数表达的多参数动力学系统时,与其他全局敏感性分析方法(如EFAST、 Morris)相比,Sobol方法具有求解效率较高,应用范围广、针对非线性耦合系统分析结果精准度高等优点[31 ] . 该方法基于方差分解原理,通过二次采样矩阵显示分离主敏感性、总敏感性并清晰地体现参数的交互效应,对于参数在15~20维的非线性耦合系统中具有更高的稳健性[32 ] . ...
A global sensitivity analysis tool for the parameters of multi-variable catchment models
1
2006
... 采用Sobol全局敏感性分析方法,对安装有MRD的水电机组轴系部件的振动情况进行分析. 在应用于无确定函数表达的多参数动力学系统时,与其他全局敏感性分析方法(如EFAST、 Morris)相比,Sobol方法具有求解效率较高,应用范围广、针对非线性耦合系统分析结果精准度高等优点[31 ] . 该方法基于方差分解原理,通过二次采样矩阵显示分离主敏感性、总敏感性并清晰地体现参数的交互效应,对于参数在15~20维的非线性耦合系统中具有更高的稳健性[32 ] . ...
Global sensitivity indices for nonlinear mathematical models and their Monte Carlo estimates
1
2001
... Sobol方法具体计算步骤[33 ] 如下:1)确定研究参数个数D 和样本空间N ,经由N 次拉丁超立方法分层抽样,在保证等概率且正交的前提下,将样本空间均匀地分为若干个互不重叠的区间,样本空间对应的矩阵为 ...
The stability analysis and nonlinear vibration control of shaft system for hydraulic generating set under multi-source excitation considering effects of dynamic and static eccentricities
1
2023
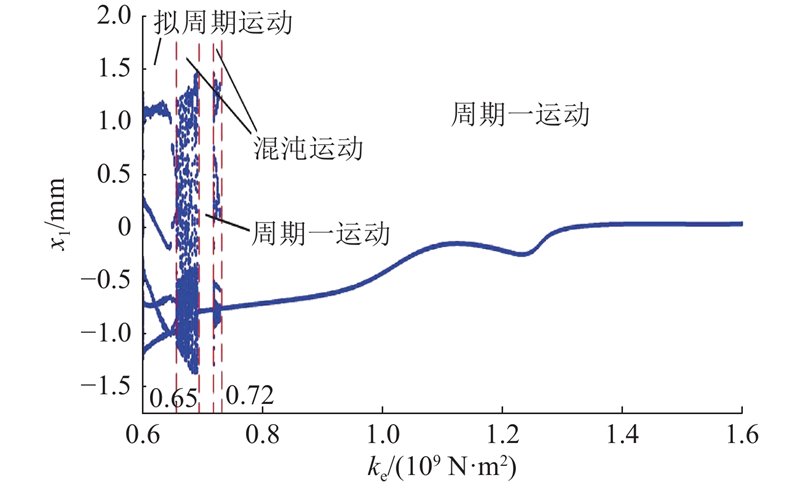
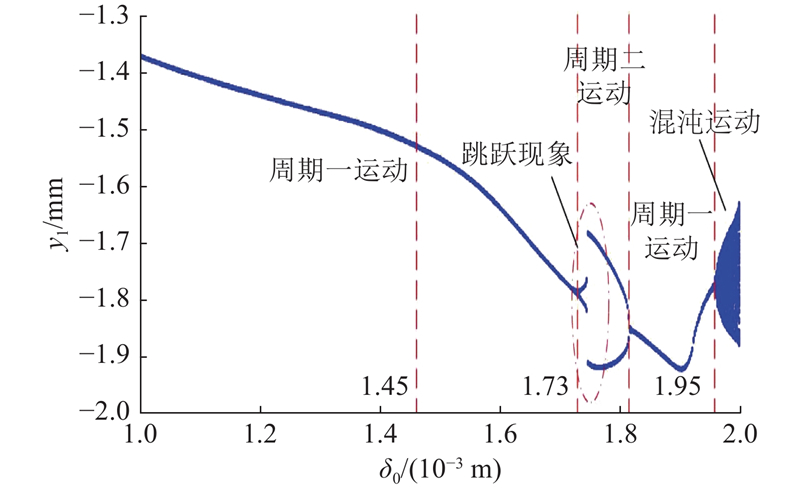
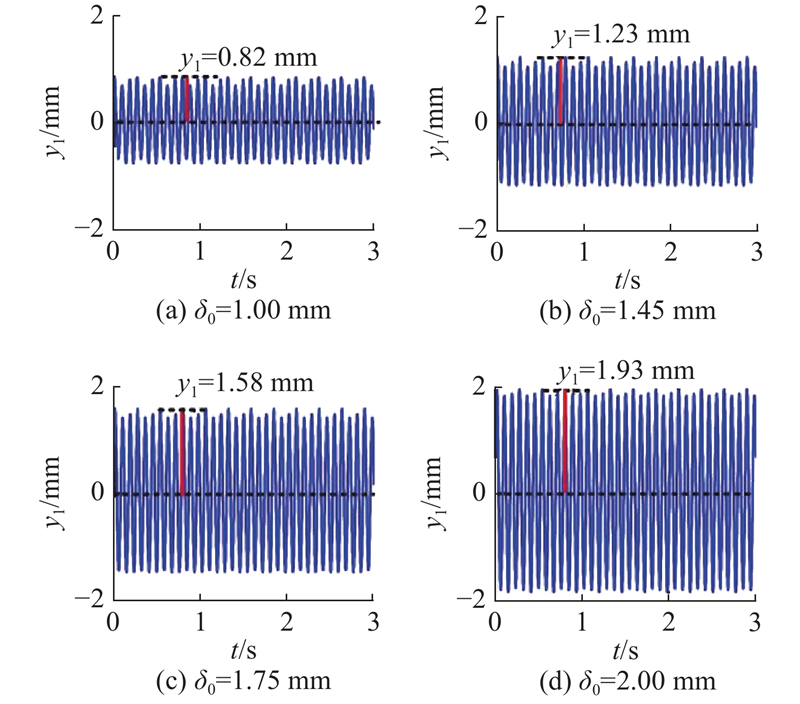
... 由上述分析结果可知,定转子均匀间隙的设定将显著影响转子Y 方向上振动情况. 分析原因:1)转子Y 方向的振动情况敏感于电磁拉力,定转子均匀气隙是影响不平衡磁拉力(unbalanced magnetic pull, UMP)的重要参数,由UMP公式可知,当δ 0 改变时,定转子间相对的气隙偏心将产生明显变化,受到气隙偏心变化的不同气隙磁导傅里叶系数将成为影响不平衡磁拉力大小的主要因素. 2)定转子动静件之间的碰摩是激化振动的主要原因[34 ] ,该参数将直接影响法向碰摩力的大小,改变碰摩条件. 定转子均匀气隙的微小改变为机组Y 方向振动由“可控”向“不可控”移动的关键阈值,将对转子Y 轴方向动态响应产生较大影响. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}