(8) $ \left[ {\begin{array}{*{20}{c}} {(u - 1,v - 1)}&{(u - 1,v)}&{(u - 1,v+1)}& \\ {(u,v - 1)}&{(u,v)}&{(u,v+1)}& \\ {(u+1,v - 1)}&{(u+1,v)}&{(u+1,v+1)}& \end{array}} \right]. $
[1]
王丹. 基于暗通道先验的图像和视频去雾模型及算法研究[D]. 长沙: 国防科学技术大学, 2016.
[本文引用: 1]
WANG Dan. Mathematical modeling and algorithm on single image and video dehazing [D]. Changsha: National University of Defense Technology, 2016.
[本文引用: 1]
[2]
PANDEY P, GUPTA R, GOEL N Comprehensive review of single image defogging techniques: enhancement, prior, and learning based approaches
[J]. Artificial Intelligence Review , 2025 , 58 (4 ): 116
DOI:10.1007/s10462-024-11034-4
[本文引用: 1]
[3]
LIU R, HE G. A novel dehazing algorithm based on Retinex principle [C]//Proceedings of the International Conference on Machine Learning and Intelligent Systems Engineering . Chongqing: IEEE, 2021: 349–356.
[本文引用: 2]
[4]
ACHARYA U K, KUMAR S Image sub-division and quadruple clipped adaptive histogram equalization (ISQCAHE) for low exposure image enhancement
[J]. Multidimensional Systems and Signal Processing , 2023 , 34 (1 ): 25 - 45
DOI:10.1007/s11045-022-00853-9
[本文引用: 1]
[5]
SURYA KAVITA T, VAMSIDHAR A, SUNIL KUMAR G, et al Cascaded combination of total variation regularization and contrast limited adaptive histogram equalization based image dehazing
[J]. The Imaging Science Journal , 2025 , 73 (2 ): 213 - 226
DOI:10.1080/13682199.2024.2345030
[6]
崔莹. 基于直方图的图像去雾方法[D]. 长春: 吉林大学, 2018.
[本文引用: 2]
CUI Ying. Histogram based image dehaze algorithm [D]. Changchun: Jilin University, 2018.
[本文引用: 2]
[7]
CHEN G, JIA Y, YIN Y, et al. Remote sensing image dehazing using a wavelet-based generative adversarial networks [J]. Scientific Reports , 2025, 15(1): 1–13.
[本文引用: 1]
[8]
YANG P, WU H, WANG T, et al Multi-scale underwater image enhancement with optimized homomorphic filter and RGB color correction
[J]. Optical Review , 2022 , 29 (6 ): 457 - 468
DOI:10.1007/s10043-022-00762-z
[本文引用: 1]
[9]
ZAMIR S W, ARORA A, KHAN S, et al Learning enriched features for fast image restoration and enhancement
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2023 , 45 (2 ): 1934 - 1948
DOI:10.1109/TPAMI.2022.3167175
[本文引用: 1]
[10]
NAYAR S K, NARASIMHAN S G. Vision in bad weather [C]//Proceedings of the 7th IEEE International Conference on Computer Vision. Kerkyra: IEEE, 2002: 820–827.
[本文引用: 1]
[11]
TAN K K, OAKLEY J P Physics-based approach to color image enhancement in poor visibility conditions
[J]. Journal of the Optical Society of America A, Optics, Image Science, and Vision , 2001 , 18 (10 ): 2460 - 2467
DOI:10.1364/JOSAA.18.002460
[本文引用: 1]
[12]
TAN R T. Visibility in bad weather from a single image [C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Anchorage: IEEE, 2008: 1–8.
[本文引用: 1]
[13]
FATTAL R. Single image dehazing [C]//ACM Transactions on Graphics . [S. l. ]: ACM, 2008.
[本文引用: 1]
[14]
HE K, SUN J, TANG X Single image haze removal using dark channel prior
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2010 , 33 (12 ): 2341 - 2353
[本文引用: 8]
[15]
MENG G, WANG Y, DUAN J, et al. Efficient image dehazing with boundary constraint and contextual regularization [C]//Proceedings of the IEEE International Conference on Computer Vision . Sydney: IEEE, 2013: 617–624.
[本文引用: 6]
[16]
ZHU Q, MAI J, SHAO L A fast single image haze removal algorithm using color attenuation prior
[J]. IEEE Transactions on Image Processing , 2015 , 24 (11 ): 3522 - 3533
DOI:10.1109/TIP.2015.2446191
[本文引用: 1]
[17]
HASSAN H, BASHIR A K, AHMAD M, et al. Real-time image dehazing by superpixels segmentation and guidance filter [J]. Journal of Real-Time Image Processing , 2020, 18(5): 1–21.
[本文引用: 1]
[18]
金天虎, 陶砚蕴, 李佐勇 基于超像素图像分割的暗通道先验去雾改进算法
[J]. 电子学报 , 2023 , 51 (1 ): 146 - 159
[本文引用: 1]
JIN Tianhu, TAO Yanyun, LI Zuoyong An improved dark channel prior dehazing algorithm based on superpixel image segmentation
[J]. Acta Electronica Sinica , 2023 , 51 (1 ): 146 - 159
[本文引用: 1]
[19]
KUMARI A, SAHOO S K A new fast and efficient dehazing and defogging algorithm for single remote sensing images
[J]. Signal Processing , 2024 , 215 : 109289
DOI:10.1016/j.sigpro.2023.109289
[本文引用: 1]
[20]
邱啟蒙, 张亚加, 高智强, 等 基于四叉树分级搜索和透射率优化的水下图像复原
[J]. 光学学报 , 2023 , 43 (12 ): 1201002
DOI:10.3788/AOS221598
[本文引用: 1]
QIU Qimeng, ZHANG Yajia, GAO Zhiqiang, et al Underwater image restoration based on quadtree hierarchical search and transmittance optimization
[J]. Acta Optica Sinica , 2023 , 43 (12 ): 1201002
DOI:10.3788/AOS221598
[本文引用: 1]
[21]
NARASIMHAN S G, NAYAR S K Contrast restoration of weather degraded images
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2003 , 25 (6 ): 713 - 724
DOI:10.1109/TPAMI.2003.1201821
[本文引用: 1]
[22]
NARASIMHAN S G, NAYAR S K Vision and the atmosphere
[J]. International Journal of Computer Vision , 2002 , 48 (3 ): 233 - 254
DOI:10.1023/A:1016328200723
[本文引用: 1]
[23]
HE K, SUN J, TANG X Guided image filtering
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2013 , 35 (6 ): 1397 - 1409
DOI:10.1109/TPAMI.2012.213
[本文引用: 1]
[25]
王健, 秦春霞, 杨珂, 等 基于HSV透射率加权修正的机载视频去雾系统设计
[J]. 西南交通大学学报 , 2021 , 56 (1 ): 160 - 167
[本文引用: 1]
WANG Jian, QIN Chunxia, YANG Ke, et al Design of airborne video dehazing system for UCAV based on HSV transmission weighted correction
[J]. Journal of Southwest Jiaotong University , 2021 , 56 (1 ): 160 - 167
[本文引用: 1]
[26]
WANG Z, BOVIK A C, SHEIKH H R, et al Image quality assessment: from error visibility to structural similarity
[J]. IEEE Transactions on Image Processing , 2004 , 13 (4 ): 600 - 612
DOI:10.1109/TIP.2003.819861
[本文引用: 1]
[27]
HUYNH-THU Q, GHANBARI M Scope of validity of PSNR in image/video quality assessment
[J]. Electronics Letters , 2008 , 44 (13 ): 800 - 801
DOI:10.1049/el:20080522
[本文引用: 1]
1
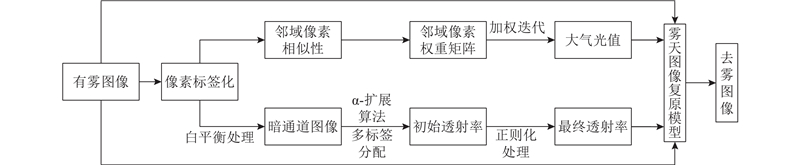
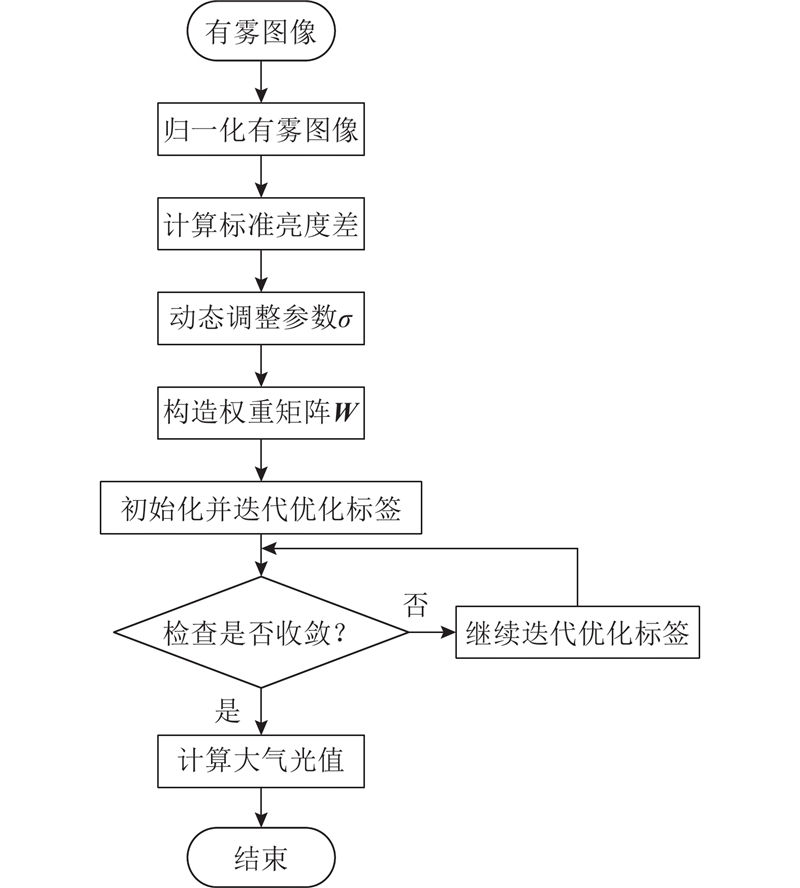
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
1
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
Comprehensive review of single image defogging techniques: enhancement, prior, and learning based approaches
1
2025
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
2
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
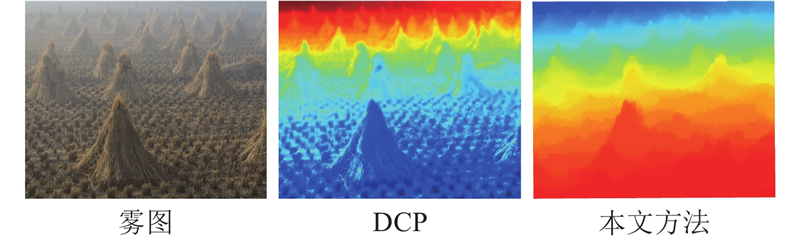
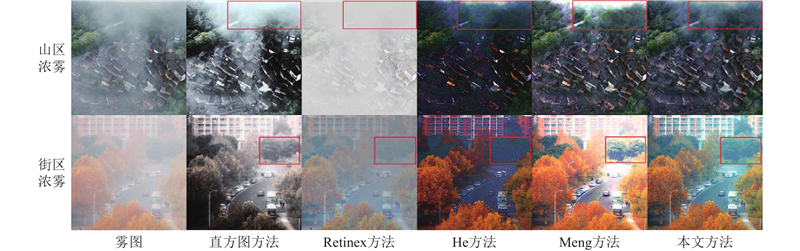
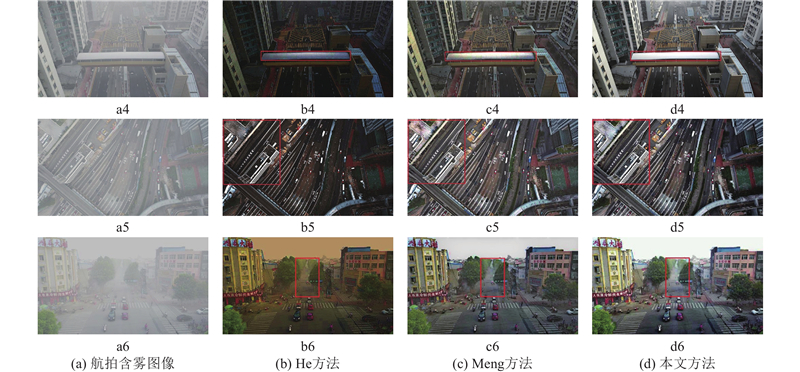
... 主观评价通过人眼观察,对恢复图像的视觉质量进行评估. 直方图均衡化[3 ] 通过调整灰度分布,增强图像的对比度. Retinex方法[6 ] 基于光照分量估计,提升视觉亮度. He等[14 ] 提出的暗通道先验(DCP)方法为当前主流的基于物理模型的去雾算法. Meng等[15 ] 引入固有边界约束与上下文正则化,实现图像复原. 为了验证本文算法的有效性,选取山区与街区的典型浓雾图像(大小为490×490)进行去雾处理,并与上述方法进行对比,部分结果如图5 所示. ...
Image sub-division and quadruple clipped adaptive histogram equalization (ISQCAHE) for low exposure image enhancement
1
2023
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
Cascaded combination of total variation regularization and contrast limited adaptive histogram equalization based image dehazing
0
2025
2
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
... 主观评价通过人眼观察,对恢复图像的视觉质量进行评估. 直方图均衡化[3 ] 通过调整灰度分布,增强图像的对比度. Retinex方法[6 ] 基于光照分量估计,提升视觉亮度. He等[14 ] 提出的暗通道先验(DCP)方法为当前主流的基于物理模型的去雾算法. Meng等[15 ] 引入固有边界约束与上下文正则化,实现图像复原. 为了验证本文算法的有效性,选取山区与街区的典型浓雾图像(大小为490×490)进行去雾处理,并与上述方法进行对比,部分结果如图5 所示. ...
2
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
... 主观评价通过人眼观察,对恢复图像的视觉质量进行评估. 直方图均衡化[3 ] 通过调整灰度分布,增强图像的对比度. Retinex方法[6 ] 基于光照分量估计,提升视觉亮度. He等[14 ] 提出的暗通道先验(DCP)方法为当前主流的基于物理模型的去雾算法. Meng等[15 ] 引入固有边界约束与上下文正则化,实现图像复原. 为了验证本文算法的有效性,选取山区与街区的典型浓雾图像(大小为490×490)进行去雾处理,并与上述方法进行对比,部分结果如图5 所示. ...
1
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
Multi-scale underwater image enhancement with optimized homomorphic filter and RGB color correction
1
2022
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
Learning enriched features for fast image restoration and enhancement
1
2023
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
1
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
Physics-based approach to color image enhancement in poor visibility conditions
1
2001
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
1
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
1
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
Single image haze removal using dark channel prior
8
2010
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
... He等[14 ] 通过对大量晴天无雾图像进行统计,提出暗通道先验去雾理论,即在某一局部区域内总存在一些像素的某一个颜色通道像素很小,接近于0,表示公式如下: ...
... 根据He等[14 ] 的研究可知,若采用局部常数假设,则标签集$L({\boldsymbol{x}})$ ${{\varOmega }}({\boldsymbol{x}})$
... 主观评价通过人眼观察,对恢复图像的视觉质量进行评估. 直方图均衡化[3 ] 通过调整灰度分布,增强图像的对比度. Retinex方法[6 ] 基于光照分量估计,提升视觉亮度. He等[14 ] 提出的暗通道先验(DCP)方法为当前主流的基于物理模型的去雾算法. Meng等[15 ] 引入固有边界约束与上下文正则化,实现图像复原. 为了验证本文算法的有效性,选取山区与街区的典型浓雾图像(大小为490×490)进行去雾处理,并与上述方法进行对比,部分结果如图5 所示. ...
... He方法[14 ] 、Meng方法[15 ] 和本文方法对夜间含雾图像 1~3(从上到下)去雾结果的对比 ...
... Comparison of dehazing result of nighttime hazy images 1-3 (from top to bottom) among He method[14 ] , Meng method[15 ] and proposed method ...
... He方法[14 ] 、Meng方法[15 ] 和本文方法对白天含雾图像 4~6(从上到下)去雾结果的对比 ...
... Comparison of dehazing result of daytime hazy images 4-6 (from top to bottom) among He method[14 ] , Meng method[15 ] and proposed method ...
6
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
... 主观评价通过人眼观察,对恢复图像的视觉质量进行评估. 直方图均衡化[3 ] 通过调整灰度分布,增强图像的对比度. Retinex方法[6 ] 基于光照分量估计,提升视觉亮度. He等[14 ] 提出的暗通道先验(DCP)方法为当前主流的基于物理模型的去雾算法. Meng等[15 ] 引入固有边界约束与上下文正则化,实现图像复原. 为了验证本文算法的有效性,选取山区与街区的典型浓雾图像(大小为490×490)进行去雾处理,并与上述方法进行对比,部分结果如图5 所示. ...
... He方法[14 ] 、Meng方法[15 ] 和本文方法对夜间含雾图像 1~3(从上到下)去雾结果的对比 ...
... Comparison of dehazing result of nighttime hazy images 1-3 (from top to bottom) among He method[14 ] , Meng method[15 ] and proposed method ...
... He方法[14 ] 、Meng方法[15 ] 和本文方法对白天含雾图像 4~6(从上到下)去雾结果的对比 ...
... Comparison of dehazing result of daytime hazy images 4-6 (from top to bottom) among He method[14 ] , Meng method[15 ] and proposed method ...
A fast single image haze removal algorithm using color attenuation prior
1
2015
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
1
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
基于超像素图像分割的暗通道先验去雾改进算法
1
2023
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
基于超像素图像分割的暗通道先验去雾改进算法
1
2023
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
A new fast and efficient dehazing and defogging algorithm for single remote sensing images
1
2024
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
基于四叉树分级搜索和透射率优化的水下图像复原
1
2023
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
基于四叉树分级搜索和透射率优化的水下图像复原
1
2023
... 目前,学者们提出了多种图像去雾方法. 基于图像增强的去雾通过像素颜色调整改善视觉效果[1 ] ,如Retinex[2 -3 ] 、直方图均衡方法[4 -6 ] 、小波变换[7 ] 、同态滤波[8 ] 、对比度增强[9 ] 等,但由于缺乏对退化机理的建模,难以有效恢复被雾掩盖的细节. 基于物理模型的图像复原去雾方法以大气散射模型为基础[10 ] ,通过先验约束估计大气光值与透射率,逆向求解退化过程以复原图像. Tan等[11 ] 利用马尔科夫随机场(Markov random field,MRF)框架法计算透射率[12 ] ,Fattal[13 ] 等基于独立成分分析(independent component analysis,ICA)估计透射率. He等[14 ] 提出经典的暗通道先验(dark channel prior,DCP)方法,该方法在边缘保持和去雾效果上表现突出. Meng等[15 ] 通过固有边界约束与上下文正则化改进恢复质量,Zhu等[16 ] 提出颜色衰减先验法以提升效率. Hassan等[17 ] 利用超像素分割与滚动引导滤波修正透射率,金天虎等[18 ] 基于超像素阈值分割解决非暗通道区域颜色失真的问题,Kumari等[19 ] 结合暗通道先验与反锐化掩模提升结构一致性与视觉质量. 尽管上述方法在单幅图像去雾中取得一定的效果,但普遍存在雾残留与细节失真问题. 造成这些问题的根本原因是不同场景下的悬浮粒子、人造光照及暗背景光干扰,导致大气光值与透射率估计不准,模型鲁棒性不足[20 ] . ...
Contrast restoration of weather degraded images
1
2003
... 由于大气中悬浮粒子的吸收和物体本身的散射作用,采集到的图像出现严重降质. 通常使用大气散射物理模型来描述雾图的形成过程[21 -22 ] ,即 ...
Vision and the atmosphere
1
2002
... 由于大气中悬浮粒子的吸收和物体本身的散射作用,采集到的图像出现严重降质. 通常使用大气散射物理模型来描述雾图的形成过程[21 -22 ] ,即 ...
Guided image filtering
1
2013
... 式中:$\theta \in (0,1.0)$ [23 ] 采用导向滤波代替软抠图(soft matting)进行透射率细化,最终的去雾复原公式为 ...
Retinex-based Laplacian pyramid method for image defogging
1
2019
... 为了客观地评价去雾效果,将所提算法与He方法、Meng方法进行实验对比. 采用图像信息熵(information entropy,IE)[24 ] 、平均梯度(average gradient,AG)[25 ] 、结构相似度(structure similarity index measure,SSIM)[26 ] 以及峰值信噪比(peak signal-to-noise ratio,PSNR)[27 ] 4项指标,对图6 、7 的去雾结果进行量化分析. ...
基于HSV透射率加权修正的机载视频去雾系统设计
1
2021
... 为了客观地评价去雾效果,将所提算法与He方法、Meng方法进行实验对比. 采用图像信息熵(information entropy,IE)[24 ] 、平均梯度(average gradient,AG)[25 ] 、结构相似度(structure similarity index measure,SSIM)[26 ] 以及峰值信噪比(peak signal-to-noise ratio,PSNR)[27 ] 4项指标,对图6 、7 的去雾结果进行量化分析. ...
基于HSV透射率加权修正的机载视频去雾系统设计
1
2021
... 为了客观地评价去雾效果,将所提算法与He方法、Meng方法进行实验对比. 采用图像信息熵(information entropy,IE)[24 ] 、平均梯度(average gradient,AG)[25 ] 、结构相似度(structure similarity index measure,SSIM)[26 ] 以及峰值信噪比(peak signal-to-noise ratio,PSNR)[27 ] 4项指标,对图6 、7 的去雾结果进行量化分析. ...
Image quality assessment: from error visibility to structural similarity
1
2004
... 为了客观地评价去雾效果,将所提算法与He方法、Meng方法进行实验对比. 采用图像信息熵(information entropy,IE)[24 ] 、平均梯度(average gradient,AG)[25 ] 、结构相似度(structure similarity index measure,SSIM)[26 ] 以及峰值信噪比(peak signal-to-noise ratio,PSNR)[27 ] 4项指标,对图6 、7 的去雾结果进行量化分析. ...
Scope of validity of PSNR in image/video quality assessment
1
2008
... 为了客观地评价去雾效果,将所提算法与He方法、Meng方法进行实验对比. 采用图像信息熵(information entropy,IE)[24 ] 、平均梯度(average gradient,AG)[25 ] 、结构相似度(structure similarity index measure,SSIM)[26 ] 以及峰值信噪比(peak signal-to-noise ratio,PSNR)[27 ] 4项指标,对图6 、7 的去雾结果进行量化分析. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}