

平衡优化器(equilibrium optimizer,EO)[5]是Faramarzi等受动态质量平衡启发而提出的新型智能优化算法. EO凭借其独特机制,在分布式发电优化[6]、医学图像融合[7]和燃料电池建模[8]等领域展现出良好的性能,但存在探索能力不足、易陷入局部最优的局限性. 为此,众多研究者提出不同的改进策略来提升其性能. 张梦溪等[9]引入浓度平衡机制、自适应因子和基于菲克定律的扰动机制,增强了算法的全局探索能力. 周鹏等[10]引入Tent混沌映射来提高收敛速度,利用透镜成像学习策略,防止算法陷入局部最优. Dinkar等[11]加入基于拉普拉斯分布的随机游走策略和融合变加速系数的对立学习策略,有效平衡了EO的探索和开发能力. Atha等[12]提出准对立混沌平衡优化器,提升了初始解的质量,减少了局部停滞. Fan等[13]引入对立学习和混沌映射来改善种群质量,利用非线性时间控制策略提高搜索效率. Wu等[14]引入质心对立学习策略和自学习策略,提高了EO算法的全局探索能力和寻优效果.
这些改进有效提升了EO算法在各自应用领域的求解性能,然而在应对高维复杂优化问题时,该算法的收敛精度、求解稳定性和摆脱局部桎梏的能力仍有进一步提升的空间. 本文提出基于交叉更新、分级搜索和三角拓扑精英学习策略的平衡优化器(CGTEO). 在CEC2017测试集上,将CGTEO与9种代表性对比算法进行多维度、多方法的求解测试和对比分析.
1. 平衡优化器算法
平衡优化器算法的灵感来源于控制体积内混合动态质量平衡的物理现象,EO中的每个粒子都根据平衡候选、指数项及生成速率来更新位置,从而使算法逐步达到平衡状态.
平衡优化器算法的步骤如下.
1)初始化参数:种群规模
式中:
2)进入迭代,对各个粒子进行边界条件的处理. 根据目标函数计算各粒子的适应度,将适应度最优的4个粒子记为平衡候选,对4个平衡候选粒子求算术平均值,构造平衡池.
式中:
3)执行记忆存储,每个粒子与上一代粒子的适应度进行比较,保留优质个体.
4)计算自适应系数
式中:
5)开始各粒子的位置更新过程,从
6)计算指数项系数
式中:
7)根据下式计算生成速率
式中:
8)对粒子位置进行更新:
式中:V为常数.
9)判断是否符合结束条件. 若符合,则输出结果;否则,转回2)继续下一轮迭代.
2. 改进算法CGTEO
2.1. 基于正余弦系数的自适应交叉更新机制
通过分析式(8)、(9)可以发现,当
式中:
式中:
在引入交叉个体
图 1
该策略通过交叉算子将平衡候选个体与更广泛的其他个体结合,可以在保持种群多样性的同时,利用优势个体的优势信息来指导搜索方向. 正余弦系数
2.2. 动态分级搜索策略
为了保持算法探索开发能力的平衡并提高最终的收敛精度,提出动态分级搜索策略. 将整个种群按照适应度进行排序,并由此生成精英池,精英池的组成如下所示:
根据排序结果,将种群分成3个子种群,各个子种群包含的个体数量在迭代过程中动态调整. 第1个子群由适应度较优的个体组成,该部分由最优个体引导,以加快整体的收敛速度. 第2个子群由适应度中等的个体组成,该部分采用混合搜索策略,每个个体以一定的概率选择向较优个体靠近,或者在当前位置进行局部搜索,以提高算法的开发能力. 第3个子群由剩下的适应度较差的个体组成,该部分个体执行随机搜索策略,以避免算法陷入局部最优,从而提高算法找到全局最优解的能力. 分级方法如下所示:
式中:
式中:
对于第1个子种群
式中:
对于第2个子种群
式中:
对于第3个子种群
式中:
上述动态分级搜索策略根据个体的适应度将种群分为3个子种群,每个子种群采用不同的搜索策略. 其中最佳个体和精英池的引导搜索提高了算法的收敛速度,高斯扰动和随机新解的引导保持了种群的多样性,有助于算法跳出局部最优,提高算法的收敛精度. 每个子种群中个体数量的动态变化进一步增强了优化过程的灵活性和适应性.
2.3. 基于三角形拓扑单元的精英邻域学习策略
为了进一步提高改进算法的求解精度,提出融合三角形拓扑单元[15]的精英邻域学习策略. 在算法执行前2节的改进策略完成位置更新后,根据适应度对种群个体进行排序,更新式(15)所示的精英池中的4个精英个体
分别为4个精英个体构造三角形拓扑单元,如图2所示为三角形拓扑单元的构造示意图. 每个精英个体作为对应单元内的第1个顶点
图 2
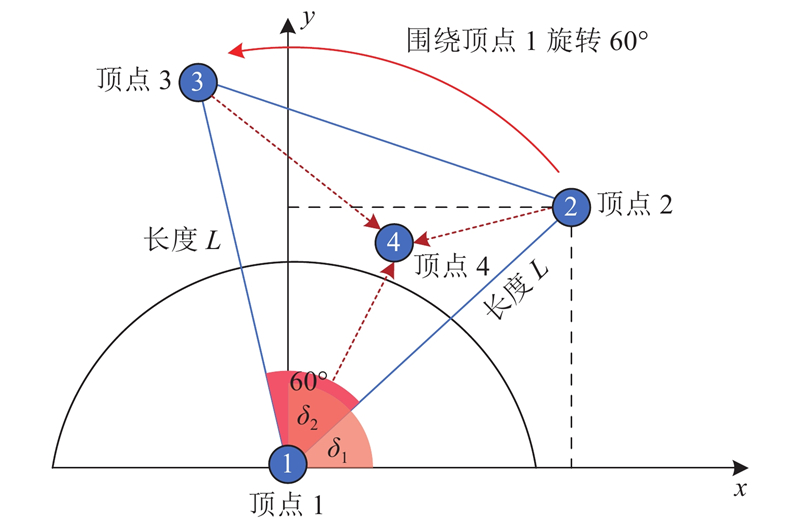
图 2 三角形拓扑单元构造的示意图
Fig.2 Schematic diagram of triangular topology unit construction
式中:
式中:
利用式(24),由1个顶点和2个边长相等的边生成1个三角形拓扑单元. 每一组三角形拓扑单元在其内部聚合产生一个新点,该点的计算公式为
式中:
在三角形拓扑单元构造完成之后,对每一组单元中的4个顶点计算适应度,找出最优个体和次优个体. 设计扰动系数
式中:
使用次优个体的位置进行扰动,可以进一步减小最优个体陷入局部极值的可能性. 在生成新的个体后,为了使收敛性向更有希望的方向发展,需要比较新个体和原来三角形拓扑单元中最优个体的适应度. 根据下式所示的贪婪选择机制来确定最优个体位置的更新.
将最优个体的位置信息赋值给用于构造当前三角形拓扑单元的精英个体,对种群中的相应个体进行同步更新.
利用提出的基于三角形拓扑单元的精英邻域学习策略,有助于算法探索精英个体附近的潜在更优解,增加了候选个体的多样性. 通过构建三角拓扑单元和扰动最优个体位置来更新种群中的精英个体,有利于减少算法陷入局部最优的风险,提高算法的搜索效率和对全局最优解的发现概率.
3. 收敛性的证明
对于优化算法而言,必须确保该算法具有收敛性,这是迭代进化类算法正确性的基本要求. CGTEO算法是随机进化算法,可以通过概率测度法来证明该算法具有全局收敛性. 根据全局收敛性准则和定理[16]可知,若该算法是全局收敛的,则需要满足以下2个条件.
条件1
条件2 对于
引理1 (随机优化算法全局收敛定理) 若函数
定理1 CGTEO算法满足条件1.
证明:根据对算法CGTEO的描述,将
式中:函数
定理2 CGTEO算法满足条件2.
证明:为了满足条件2,规模为
式中:
对于CGTEO算法中的交叉更新位置机制,有
式中:
类似地,对于CGTEO算法中经过动态分级搜索策略的个体,设支撑集的并集为
对于CGTEO算法中执行精英邻域学习策略的个体,设支撑集的并集为
令
从上述证明可知,CGTEO算法满足条件1和条件2. 由引理1可知,CGTEO具有全局收敛性.
4. 实验测试及结果分析
为了全面验证CGTEO算法在全局优化问题中的求解性能,将该算法与基本EO算法、EO相关的有效改进算法、其他具有影响力的新兴智能优化算法以及在CEC函数求解中表现优异的其他智能优化改进算法共9种对比算法进行系统化的比较分析. 所选的9种对比算法如下:平衡优化器(EO、2020)[5],基于反向学习和新更新规则的改进平衡优化器(m-EO、2021)[13],自学习策略平衡优化器(AEO、2023)[14],正余弦算法(SCA、2016)[2],哈里斯鹰优化算法(HHO、2019)[3],雪消融优化器(SAO、2023)[4],基于高斯变异和维度决策的哈里斯鹰优化算法(GCHHO、2021)[17],集成正弦微分协方差矩阵自适应差分进化算法(LSHADE-cnEpSin、2017)[18]和多重自适应差分进化算法(MadDE、2021)[19]. 实验基于权威且测试集中包含函数最丰富的IEEE CEC2017开展,从多个维度评估算法的性能.
4.1. 测试函数和环境
CEC2017是当前广泛使用且函数齐全的标准测试集之一,包含单峰函数(F1、F3)、简单多峰函数(F4~F10)、混合函数(F11~F20)和复合函数(F21~F30)共29个具有不同特性和难度的测试函数,每个函数的搜索范围为[−100,100].
为了确保结果的公正性和客观性,每种算法在相同的实验环境和设置条件下独立运行30次,
4.2. 寻优精度的分析
表 1 CGTEO与EO及其改进算法的测试结果比较
Tab.1
| 函数 | 算法 | 平均值 | 最佳值 | 最差值 | 函数 | 算法 | 平均值 | 最佳值 | 最差值 | |
| F1 | CGTEO | 4.40×104 | 1.44×104 | 1.14×105 | F12 | CGTEO | 2.11×107 | 7.78×106 | 4.71×107 | |
| F1 | EO | 2.09×109 | 2.05×108 | 9.70×109 | F12 | EO | 9.16×107 | 4.46×107 | 1.73×108 | |
| F1 | m-EO | 1.89×1010 | 8.98×109 | 3.17×1010 | F12 | m-EO | 6.34×108 | 2.94×108 | 1.46×109 | |
| F1 | AEO | 1.02×109 | 1.32×108 | 6.39×109 | F12 | AEO | 7.81×107 | 3.14×107 | 1.71×108 | |
| F5 | CGTEO | 7.65×102 | 6.95×102 | 8.90×102 | F13 | CGTEO | 6.33×103 | 2.90×103 | 1.83×104 | |
| F5 | EO | 1.14×103 | 9.26×102 | 1.35×103 | F13 | EO | 3.23×104 | 1.28×104 | 1.40×105 | |
| F5 | m-EO | 1.37×103 | 1.23×103 | 1.50×103 | F13 | m-EO | 8.55×105 | 2.04×105 | 1.96×106 | |
| F5 | AEO | 1.07×103 | 8.78×102 | 1.25×103 | F13 | AEO | 2.79×104 | 1.10×104 | 7.24×104 | |
| F6 | CGTEO | 6.08×102 | 6.04×102 | 6.13×102 | F28 | CGTEO | 3.52×103 | 3.45×103 | 3.60×103 | |
| F6 | EO | 6.27×102 | 6.18×102 | 6.44×102 | F28 | EO | 4.12×103 | 3.80×103 | 4.89×103 | |
| F6 | m-EO | 6.68×102 | 6.55×102 | 6.80×102 | F28 | m-EO | 5.37×103 | 4.44×103 | 6.35×103 | |
| F6 | AEO | 6.21×102 | 6.11×102 | 6.37×102 | F28 | AEO | 3.94×103 | 3.72×103 | 4.37×103 | |
| F7 | CGTEO | 1.11×103 | 1.02×103 | 1.21×103 | F29 | CGTEO | 5.29×103 | 4.42×103 | 6.16×103 | |
| F7 | EO | 1.89×103 | 1.58×103 | 2.20×103 | F29 | EO | 7.01×103 | 5.40×103 | 8.32×103 | |
| F7 | m-EO | 2.74×103 | 2.48×103 | 3.05×103 | F29 | m-EO | 9.73×103 | 7.73×103 | 1.24×104 | |
| F7 | AEO | 1.63×103 | 1.40×103 | 1.94×103 | F29 | AEO | 6.84×103 | 5.11×103 | 8.55×103 | |
| F11 | CGTEO | 4.40×103 | 3.39×103 | 6.05×103 | F30 | CGTEO | 8.42×104 | 6.02×104 | 1.20×105 | |
| F11 | EO | 3.39×104 | 2.10×104 | 6.10×104 | F30 | EO | 6.35×105 | 1.92×105 | 1.91×106 | |
| F11 | m-EO | 1.24×104 | 8.25×103 | 1.99×104 | F30 | m-EO | 1.57×107 | 3.66×106 | 3.11×107 | |
| F11 | AEO | 1.43×104 | 8.94×103 | 2.27×104 | F30 | AEO | 4.88×105 | 1.81×105 | 1.23×106 |
表 2 CGTEO与其他新兴优化算法的测试结果比较
Tab.2
| 函数 | 算法 | 平均值 | 最佳值 | 最差值 | 函数 | 算法 | 平均值 | 最佳值 | 最差值 | |
| F1 | CGTEO | 4.40×104 | 1.44×104 | 1.14×105 | F12 | CGTEO | 2.11×107 | 7.78×106 | 4.71×107 | |
| F1 | SCA | 2.02×1011 | 1.81×1011 | 2.28×1011 | F12 | SCA | 9.34×1010 | 7.05×1010 | 1.12×1011 | |
| F1 | HHO | 8.20×109 | 4.59×109 | 1.40×1010 | F12 | HHO | 1.54×109 | 8.08×108 | 2.99×109 | |
| F1 | SAO | 2.76×109 | 1.01×109 | 6.34×109 | F12 | SAO | 1.32×108 | 5.06×107 | 2.90×108 | |
| F5 | CGTEO | 7.65×102 | 6.95×102 | 8.90×102 | F13 | CGTEO | 6.33×103 | 2.90×103 | 1.83×104 | |
| F5 | SCA | 2.03×103 | 1.93×103 | 2.19×103 | F13 | SCA | 1.58×1010 | 1.22×1010 | 2.18×1010 | |
| F5 | HHO | 1.60×103 | 1.54×103 | 1.72×103 | F13 | HHO | 1.96×107 | 9.54×106 | 3.68×107 | |
| F5 | SAO | 1.53×103 | 1.11×103 | 1.75×103 | F13 | SAO | 1.68×104 | 5.32×103 | 5.10×104 | |
| F6 | CGTEO | 6.08×102 | 6.04×102 | 6.13×102 | F28 | CGTEO | 3.52×103 | 3.45×103 | 3.60×103 | |
| F6 | SCA | 7.02×102 | 6.93×102 | 7.13×102 | F28 | SCA | 2.07×104 | 1.64×104 | 2.38×104 | |
| F6 | HHO | 6.88×102 | 6.81×102 | 6.98×102 | F28 | HHO | 5.70×103 | 5.09×103 | 6.54×103 | |
| F6 | SAO | 6.29×102 | 6.20×102 | 6.43×102 | F28 | SAO | 3.74×103 | 3.52×103 | 4.16×103 | |
| F7 | CGTEO | 1.11×103 | 1.02×103 | 1.21×103 | F29 | CGTEO | 5.29×103 | 4.42×103 | 6.16×103 | |
| F7 | SCA | 3.93×103 | 3.54×103 | 4.37×103 | F29 | SCA | 3.42×104 | 2.13×104 | 6.34×104 | |
| F7 | HHO | 3.76×103 | 3.54×103 | 3.96×103 | F29 | HHO | 1.17×104 | 9.33×103 | 1.36×104 | |
| F7 | SAO | 2.18×103 | 2.02×103 | 2.61×103 | F29 | SAO | 6.68×103 | 5.68×103 | 9.70×103 | |
| F11 | CGTEO | 4.40×103 | 3.39×103 | 6.05×103 | F30 | CGTEO | 8.42×104 | 6.02×104 | 1.20×105 | |
| F11 | SCA | 1.47×105 | 1.08×105 | 1.95×105 | F30 | SCA | 7.11×109 | 3.81×109 | 9.39×109 | |
| F11 | HHO | 7.38×104 | 3.01×104 | 1.15×105 | F30 | HHO | 7.17×107 | 3.20×107 | 1.57×108 | |
| F11 | SAO | 1.78×105 | 1.01×105 | 3.14×105 | F30 | SAO | 5.33×105 | 1.02×105 | 1.92×106 |
4.2.1. CGTEO与EO及其有效改进算法的对比
为了验证CGTEO算法相较于EO及其改进算法在求解性能上的优势,将CGTEO与基本EO算法及2种新近提出的有效改进算法m-EO和AEO进行对比分析. 4种算法分别在
从表1可以看出,当
4.2.2. CGTEO与其他新兴基本优化算法的对比
从表2可以看出,CGTEO在4种类型函数上的平均值、最佳值和最差值均显著优于其他3种对比算法,求解效果十分出色. 可知,CGTEO在与近年提出的各类高效基准算法比较中,具有很强的全局优化能力和稳定性.
4.2.3. CGTEO与其他高性能改进算法的对比
为了进一步验证CGTEO算法相对于当前先进改进算法的竞争性能,将CGTEO算法与GCHHO、LSHADE-cnEpSin和MadDE 3种改进算法进行比较分析. 其中,GCHHO是效果显著的哈里斯鹰改进算法,LSHADE-cnEpSin和MadDE分别是CEC2017、CEC2021的优胜算法,它们在求解CEC函数方面有着出色的表现,具有较大的挑战性. 如表3所示为4种算法在
表 3 CGTEO与其他高性能改进算法的测试结果比较
Tab.3
| 函数 | 算法 | 平均值 | 最佳值 | 最差值 | 函数 | 算法 | 平均值 | 最佳值 | 最差值 | |
| F1 | CGTEO | 4.40×104 | 1.44×104 | 1.14×105 | F12 | CGTEO | 2.11×107 | 7.78×106 | 4.71×107 | |
| F1 | GCHHO | 3.34×108 | 1.35×108 | 7.90×108 | F12 | GCHHO | 2.06×108 | 5.76×107 | 3.91×108 | |
| F1 | LSHADE-c | 5.53×108 | 1.60×108 | 1.55×109 | F12 | LSHADE-c | 2.30×108 | 5.27×107 | 3.99×108 | |
| F1 | MadDE | 1.60×1010 | 7.99×109 | 2.90×1010 | F12 | MadDE | 8.38×108 | 3.93×108 | 2.19×109 | |
| F5 | CGTEO | 7.65×102 | 6.95×102 | 8.90×102 | F13 | CGTEO | 6.33×103 | 2.90×103 | 1.83×104 | |
| F5 | GCHHO | 1.33×103 | 1.20×103 | 1.46×103 | F13 | GCHHO | 3.18×105 | 7.58×103 | 8.86×106 | |
| F5 | LSHADE-c | 1.10×103 | 9.67×102 | 1.23×103 | F13 | LSHADE-c | 7.22×104 | 2.53×104 | 3.63×105 | |
| F5 | MadDE | 1.46×103 | 1.34×103 | 1.57×103 | F13 | MadDE | 2.80×104 | 1.56×104 | 5.47×104 | |
| F6 | CGTEO | 6.08×102 | 6.04×102 | 6.13×102 | F28 | CGTEO | 3.52×103 | 3.45×103 | 3.60×103 | |
| F6 | GCHHO | 6.62×102 | 6.57×102 | 6.67×102 | F28 | GCHHO | 3.95×103 | 3.65×103 | 4.35×103 | |
| F6 | LSHADE-c | 6.33×102 | 6.20×102 | 6.43×102 | F28 | LSHADE-c | 3.90×103 | 3.68×103 | 4.28×103 | |
| F6 | MadDE | 6.54×102 | 6.43×102 | 6.64×102 | F28 | MadDE | 6.25×103 | 5.37×103 | 7.69×103 | |
| F7 | CGTEO | 1.11×103 | 1.02×103 | 1.21×103 | F29 | CGTEO | 5.29×103 | 4.42×103 | 6.16×103 | |
| F7 | GCHHO | 2.87×103 | 2.50×103 | 3.25×103 | F29 | GCHHO | 7.68×103 | 6.60×103 | 8.74×103 | |
| F7 | LSHADE-c | 2.21×103 | 1.88×103 | 2.63×103 | F29 | LSHADE-c | 7.84×103 | 6.93×103 | 8.77×103 | |
| F7 | MadDE | 2.82×103 | 2.59×103 | 3.09×103 | F29 | MadDE | 8.81×103 | 7.91×103 | 9.84×103 | |
| F11 | CGTEO | 4.40×103 | 3.39×103 | 6.05×103 | F30 | CGTEO | 8.42×104 | 6.02×104 | 1.20×105 | |
| F11 | GCHHO | 2.05×104 | 1.12×104 | 4.53×104 | F30 | GCHHO | 1.51×106 | 4.75×105 | 2.64×106 | |
| F11 | LSHADE-c | 2.32×104 | 5.39×103 | 9.91×104 | F30 | LSHADE-c | 3.83×106 | 1.10×106 | 1.07×107 | |
| F11 | MadDE | 6.28×104 | 4.88×104 | 9.68×104 | F30 | MadDE | 4.51×106 | 9.44×105 | 2.02×107 |
从表3可以看出,当
4.3. 收敛曲线的分析
绘制CGTEO算法和9种对比算法在
图 3
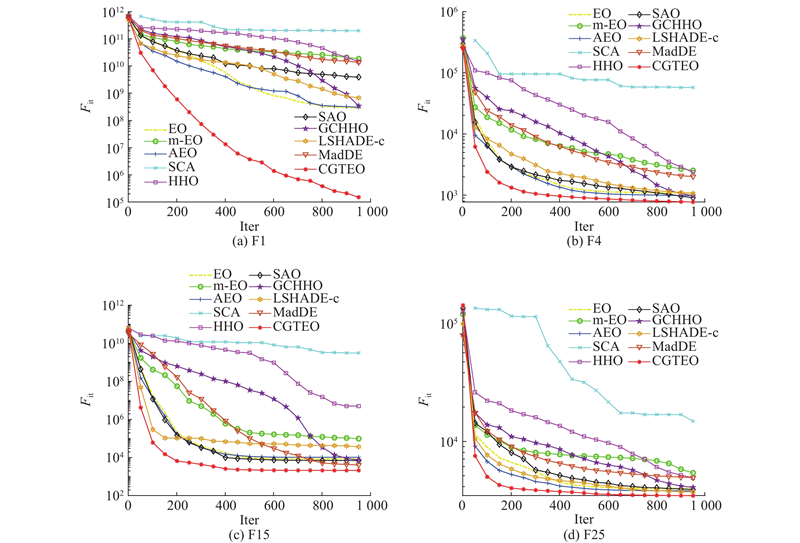
从图3可以看出,CGTEO算法的收敛曲线在4个函数上始终保持着最快的收敛速度,且最终的收敛精度优于其他9种对比算法. 收敛曲线整体上更加光滑,陷入局部极值的次数较少,展现出较好的求解性能.
4.4. 基于小提琴图的稳定性分析
小提琴图能够显示多组数据的分布情况和概率密度. 通过绘制各算法独立求解函数30次结果的小提琴图来评估稳定性. 算法的稳定性通过观察小提琴图中求解数据的分布范围、集中程度和密度分布来衡量. 小提琴图的高度表示数据的分布范围,较短的高度意味着该算法的结果在多次运行中更集中,波动较小,具有较高的稳定性. 图的宽度反映了数据的分布密度,某一数值处的宽度越大,表示数据更多地集中在这个数值附近,数据在此处的密度越高. 小提琴图中间的实线和虚线分别表示数据的平均值和中位数. 如图4所示为CGTEO算法与其他对比算法在
图 4
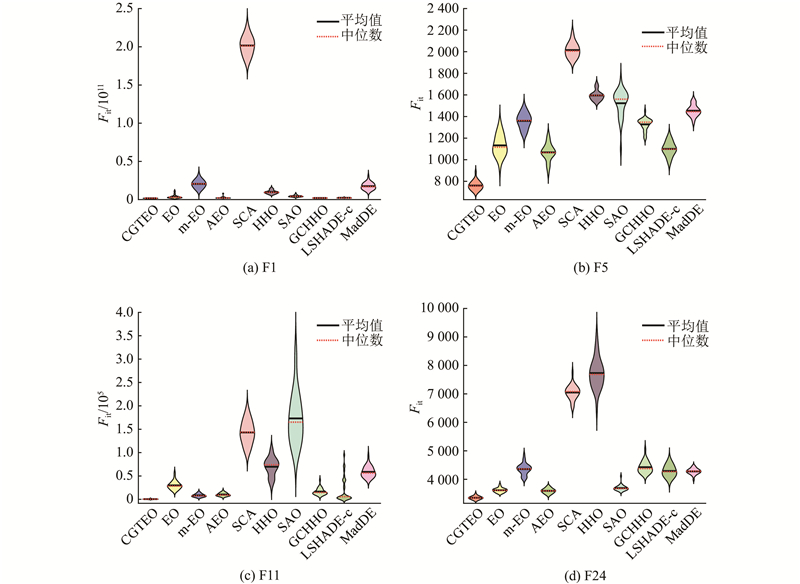
从图4可以看出,对于F1、F5、F11、F24这4个函数,CGTEO算法的小提琴图高度均最短,表明该算法具有较优的稳定性. 特别是在函数F1和F11上,CGTEO的小提琴图几乎浓缩为一条横线,意味着CGTEO的求解结果能够集中收敛在最优值附近. 在函数F11和F24上,CGTEO的整体数据分布较其他算法更加集中,且在平均值处的概率密度更高,说明CGTEO较其他算法具有更好的收敛集中度和稳定性. 此外,对于求最小值优化问题来说,小提琴图的位置越靠近底部,表示算法的求解质量越好. CGTEO算法在4个函数中的小提琴图位置都最低,且平均值和中位数都低于其他对比算法,表明该算法整体寻优结果的质量较高.
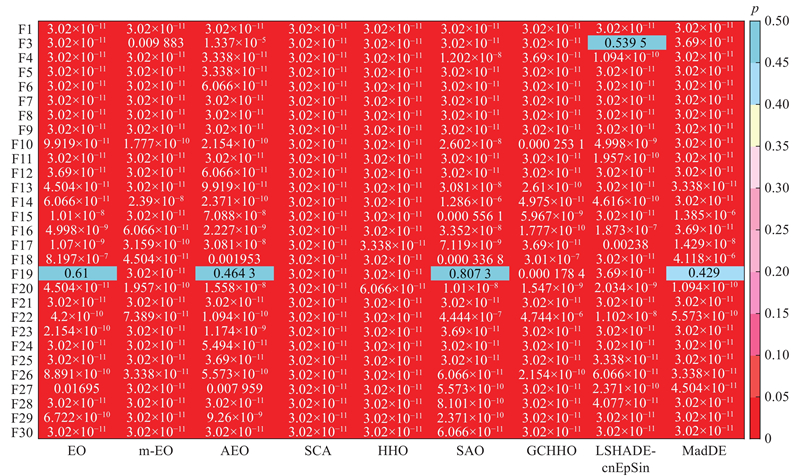
4.5. Wilcoxon秩和检验的统计分析
图 5
5. 结 语
本文提出融合自适应交叉更新、动态分级搜索和三角拓扑精英学习策略的平衡优化器(CGTEO). 引入自适应交叉更新机制,增强了算法的全局搜索能力. 加入动态分级搜索策略,平衡了算法的全局探索和局部挖掘能力. 引入基于三角形拓扑单元的精英邻域学习策略,提高了算法的收敛精度和摆脱局部桎梏的能力. 利用概率测度法,证明了CGTEO具有全局收敛性. 在实验中,通过CEC2017测试套件对CGTEO与9种代表性对比算法进行性能测试,验证了CGTEO的寻优精度、收敛性能和求解稳定性均明显优于其他对比算法,且优化结果与其他算法相比具有显著性差异. 后续将考虑把算法应用于实际优化问题,并进一步改善平衡优化器的算法机制和寻优性能,拓展其在更多领域的应用可行性.
参考文献
The whale optimization algorithm
[J].DOI:10.1016/j.advengsoft.2016.01.008 [本文引用: 1]
SCA: a sine cosine algorithm for solving optimization problems
[J].DOI:10.1016/j.knosys.2015.12.022 [本文引用: 3]
Harris hawks optimization: algorithm and applications
[J].DOI:10.1016/j.future.2019.02.028 [本文引用: 3]
Snow ablation optimizer: a novel metaheuristic technique for numerical optimization and engineering design
[J].DOI:10.1016/j.eswa.2023.120069 [本文引用: 3]
Equilibrium optimizer: a novel optimization algorithm
[J].DOI:10.1016/j.knosys.2019.105190 [本文引用: 2]
Enhancement of voltage profile in the distribution system by reconfiguring with DG placement using equilibrium optimizer
[J].DOI:10.1016/j.aej.2021.09.063 [本文引用: 1]
Combining gabor energy with equilibrium optimizer algorithm for multi-modality medical image fusion
[J].DOI:10.1016/j.bspc.2021.102696 [本文引用: 1]
Equilibrium optimizer for parameter extraction of a fuel cell dynamic model
[J].DOI:10.1016/j.renene.2020.12.131 [本文引用: 1]
融合浓度平衡和菲克定律的新平衡优化器算法
[J].DOI:10.3778/j.issn.1002-8331.2205-0007 [本文引用: 1]
New equilibrium optimizer algorithm combining concentration equilibrium and Fick’s law
[J].DOI:10.3778/j.issn.1002-8331.2205-0007 [本文引用: 1]
基于Tent混沌和透镜成像学习策略的平衡优化器算法
[J].
An equilibrium optimizer algorithm based on a Tent chaos and lens imaging learning strategy
[J].
Opposition-based Laplacian equilibrium optimizer with application in image segmentation using multilevel thresholding
[J].DOI:10.1016/j.eswa.2021.114766 [本文引用: 1]
An enhanced equilibrium optimizer for solving complex optimization problems
[J].DOI:10.1016/j.ins.2023.120077 [本文引用: 1]
A modified equilibrium optimizer using opposition-based learning and novel update rules
[J].DOI:10.1016/j.eswa.2021.114575 [本文引用: 2]
Ameliorated equilibrium optimizer with application in smooth path planning oriented unmanned ground vehicle
[J].DOI:10.1016/j.knosys.2022.110148 [本文引用: 2]
Triangulation topology aggregation optimizer: a novel mathematics-based meta-heuristic algorithm for continuous optimization and engineering applications
[J].DOI:10.1016/j.eswa.2023.121744 [本文引用: 1]
Minimization by random search techniques
[J].DOI:10.1287/moor.6.1.19 [本文引用: 1]
Dimension decided harris hawks optimization with Gaussian mutation: balance analysis and diversity patterns
[J].DOI:10.1016/j.knosys.2020.106425 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}