

过头作业是手在肩峰高度或以上进行的作业[3],该工况下作业时肩部肌肉的活动度为手在髋部水平作业的3倍[4],极易引起上肢WMSDs[5],已被确定为工业领域肌肉骨骼的危险要素之一[6-7]. Dickerson等[8]认为过头作业及其引起的WMSDs会受作业任务设计、疲劳累积、骨骼运动及肌力的影响而发生改变. Renda等[9]研究过头作业疲劳任务中的优势手、肩部肌肉激活及性别的差异. Yang等[10]通过数字人建模仿真分析,得出过头作业时上臂和颈部面临最大的工效学暴露风险. 田保珍等[11]研究汽车底盘维修中过头作业不同的操作面和操作高度对肌肉疲劳的影响. Alabdulkarim等[12]设计过头钻孔作业实验,发现作业精度要求提高会增加肌肉活动度并降低作业质量. Maurice等[13]结合动作捕捉、表面肌电(surface electromyography,sEMG)及主观量表等技术,综合评估被动外骨骼在辅助过头作业中的效用. 赵川等[14]研究设备、姿势对过头作业肌肉疲劳的影响.
以上研究从不同角度探讨过头作业引起的上肢疲劳问题,但多关注上肢肌肉的单独作用. 上肢活动时,肌肉间存在相互依附,反映肌肉在工作时的同步振荡[15],即肌间耦合关系. 多块肌肉同时参与动作时的相互组合与协调关系可以由肌间协同反映[16],人体通过调节肌肉协同而非单独控制每块肌肉来管理肌肉骨骼系统中的自由度[17]. 目前,肌间耦合与协同研究主要集中在运动医学、康复工程以及神经科学等领域[18-22],而复杂装备的过头作业涉及上肢多个部位肌肉的耦合作用与协同,但目前缺少对过头作业领域上肢肌肉耦合与协同的研究. 通过解析过头作业上肢肌间的耦合与协同特性,有助于揭示过头作业上肢肌肉相互配合协调的产生与执行规律,为过头作业的WMSDs预防与辅助作业设备开发提供指导.
本文通过设计不同高度下的过头作业实验,采集被试者的上肢sEMG,利用广义偏定向相干性和非负矩阵分解,探究上肢多块肌肉之间的耦合与协同特性. 引入复杂网络理论,建立上肢肌肉功能网络模型,解析了过头作业不同高度下的肌间耦合与协同特性.
1. 过头作业实验
1.1. 数据采集与预处理
1.1.1. 采集实验
1)采集对象. 根据对某复杂装备维修的前期调研,维修人员多为身体素质良好的男性,常须手持维修工具长时间保持过头作业姿态. 考虑实际作业场景,选取12名具备良好身体素质的成年男性作为被试者,编号为S1~S12. 被试者的平均年龄为(23±2)岁,身高为(175±2.5)cm,体重为(60±5)kg,均为右利手. 在测试前72小时,被试者不得剧烈运动,饮酒或服用影响神经系统的药物,且所有被试者均无骨骼相关的既往病史. 本实验得到长安大学学术委员会的批准.
2)实验过程. 实验前的准备工作:将空调调至26 ℃,保证室内恒温,被试者签署知情同意书并进行热身,随后清洁被试者皮肤表面并贴好电极片.
维修实验:将过头维修实验分为3个高度进行,分别为超过头顶0 cm(H1)、5 cm(H2)、10 cm(H3). 在实验过程中,被试者手持扳手直立于地面,分别在3个高度下进行复杂装备的维修,同时一旁有观测人员通过高度标记线观察高度的变化. 若高度偏差超过1 cm,则此次实验作废. 每个高度连续测试5 min并采集上肢sEMG数据,同一被试者连续2次的测试间隔不少于20 min,以保证被试者有充分休息,避免影响下次实验的数据.
1.1.2. 数据采集
采用意大利BTS Bioengineering公司的8通道BTS FreeEMG
图 1
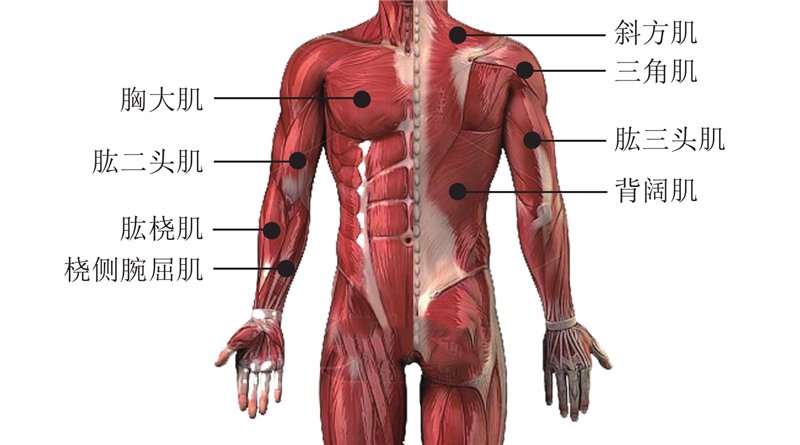
图 1 sEMG采集实验的上肢肌肉分布
Fig.1 Distribution of upper limb muscles in sEMG acquisition experiment
1.1.3. 数据预处理
由于肌电信号十分微弱并易受到干扰,须对原始数据进行预处理. 采用二阶巴特沃斯滤波器构建带通滤波器,对信号进行带通滤波,提取20~450 Hz范围内的主要频率. 构建陷波滤波器,去除50 Hz的工频噪声. 采用小波阈值去噪,消除通道间串扰及肌电信号中的高斯白噪声[23].
2. 肌间耦合及协同分析方法
2.1. 广义偏定向相干性
对于一组同时观测的时间序列,
式中:
假设X(n)被阶次为p的MVAR模型充分表示,
式中:C(i)为系数矩阵,p为模型阶数,m为信号通道数,
在获得
式中:f为频率;fn为采样频率;
为了进一步得到信号之间的传导性,可以定义修正后的传递函数
式中:I为维数为8的单位矩阵,则相干性值
式中:
通过GPDC计算,可得两两肌肉间的耦合强度. 信号流出占比最大的肌肉与其他肌肉的耦合性最强,在过头作业中更易积累疲劳.
2.2. 非负矩阵分解算法
2.2.1. 非负矩阵分解
非负矩阵分解(non-negative matrix factorization,NMF)的目的是将数据拆解为目标形式,同时保证分解矩阵中的所有元素均为非负值,使得分解形式和结果具有更好的解释性和实际意义[26]. 将NMF应用于计算所得的相干性值,提取过头作业sEMG信号各频率的激活系数和协同模式数量. NMF算法的基本形式为
式中:
NMF的求解一般描述为迭代优化问题,通过计算误差平方和
为了确定不同协同模式下的协同肌肉,利用基矩阵分别计算不同协同模式下8个通道的总信息流出量,将总信息流出量归一化为[0,1.0]. 若某个通道归一化后的总信息流出量大于0.5,则认为该肌肉在协同作用中是显著激活的,与其他活跃的肌肉具有协同关系,反之则不具有[27]. 通过NMF找到3种高度下的肌肉协同模式以及不同协同模式下的协同肌肉,结合肌间耦合的特性,为指导改善过头作业的姿势和开发辅助装备提供理论依据.
2.2.2. 解释性方差
为了确定NMF过程中的肌肉协同矩阵列数b,即确定最佳肌肉协同模式的数量. 运用解释方差(variability accounted for,VAF)计算为
式中:RSS为残差平方和,TSS为总平方和.
当VAF>0.95且随着b的增加变化不超过1%时,认为b为有效的分解列数.
2.3. 复杂网络
肌肉功能网络建模的基本思想是以过头作业的上肢肌肉作为网络节点,以肌间信息流动为边,建立由节点集和边集组成的拓扑图,有助于明确肌间信息流向、协同作用关系及耦合强度. 利用NMF得到的基矩阵构建肌肉功能网络,计算平均度(average degree)、平均聚类系数(average clustering coefficient)、平均路径长度(average path length),对肌肉功能网络的连接规律进行评价,分别从节点连接强度、局部结构紧密性及全局节点可达性等多个角度较全面地描述肌肉功能网络的特性,有助于进一步探究3种作业高度下的肌间耦合及协同性.
肌肉功能网络平均度的计算公式为
式中:N为节点总数,
平均聚类系数的计算公式为
式中:
平均路径长度的计算公式为
式中:
3. 实验结果
为了研究过头作业中不同高度下的肌间耦合与协同特性,使用GPDC计算多通道sEMG的PDC,分析8个通道之间的全局耦合特性. 应用NMF对PDC进行分解,提取不同的肌肉协同模式,获得各模式下与频率相关的激活系数和相干性矩阵. 通过PDC矩阵确定每种协同模式下的协同肌肉,构建肌肉功能网络,进一步评估该网络的特性.
3.1. 上肢肌肉全局耦合特性的分析
全局耦合特性反映了过头作业中上肢肌肉间的整体交互和关联关系. 以H3高度为例,利用GPDC计算12名被试者8块肌肉之间的PDC(考虑到消除随机性,得到一般性结果,对12名被试者的PDC取平均值),得到通道间肌间信息传递的方向及强度,计算各肌肉PDC的面积占比Pe,结果如图2所示. 其中,Pe越大表示该肌肉与对应肌肉的耦合性越强.
图 2
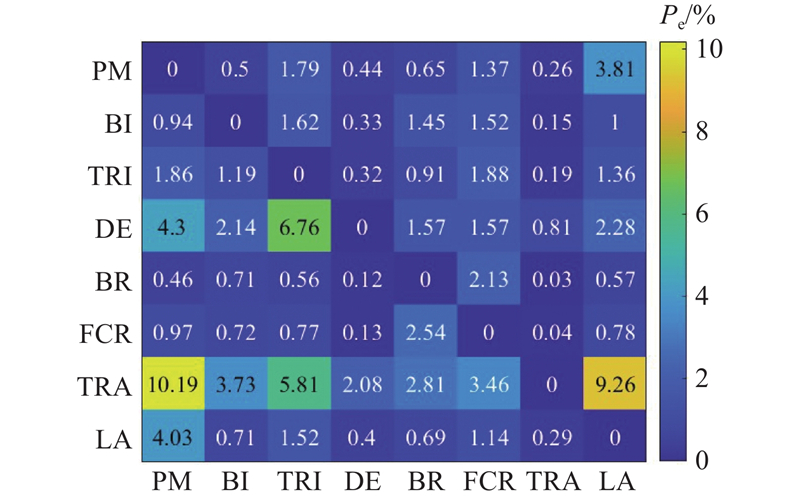
图 2 H3高度下的上肢各肌肉PDC面积与总面积之比
Fig.2 Ratio of PDC area to total area of each upper limb muscle at H3 height
从图2可知,TRA→PM、TRA→LA和DE→TRI方向上的耦合度最高,阴影面积分别占总面积的10.19%、9.26%、6.76%;TRA→TRI、DE→PM和LA→PM方向的耦合强度次之,阴影面积分别占总面积的5.81%、4.3%、4.03%. 从整体来看,DE和TRA流出的信息最多,LA、PM次之,其他肌肉少有信息流出.
对3个高度下的PDC面积占比进行显著性检验,显著性水平大于0.05,表明3个不同高度的耦合特性无显著性差异,即不同高度下DE和TRA流出信息均最多,且流向PM、TRI、LA的强度较大,说明肩部肌肉与其他肌肉的耦合度较强,则肩部肌肉比其他肌肉更易积累疲劳,进而增加WMSDs风险.
3.2. NMF
为了探究肌肉之间的协同关系,找出不同的协同模式及协同肌肉,在耦合关系的基础上,采用NMF计算H3高度过头作业实验得到的12名被试者的平均PDC值.
利用VAF提取有效的协同模式,结果如图3所示. 可知,当b = 2时,H1、H2、H3高度下的VAF分别为0.972、0.975、0.977,之后随着分解列数的增加,VAF的变化小于1%,因此认为当b = 2时分解结果最佳.
图 3
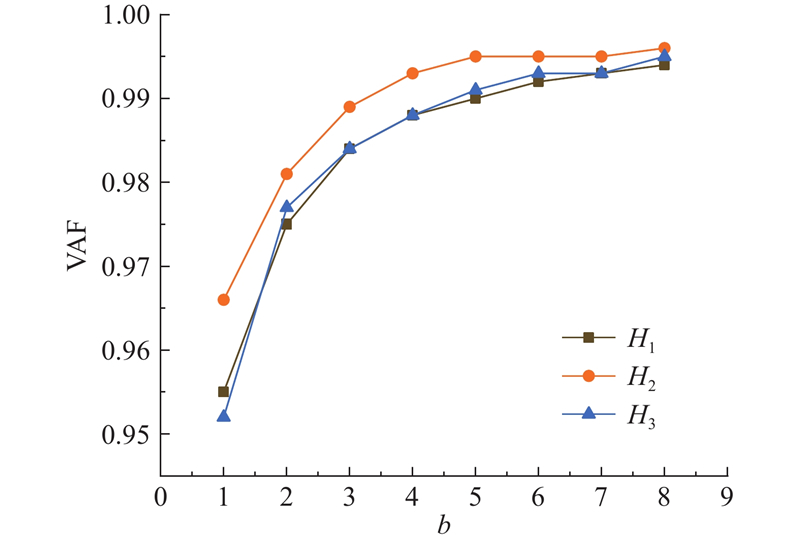
图 4
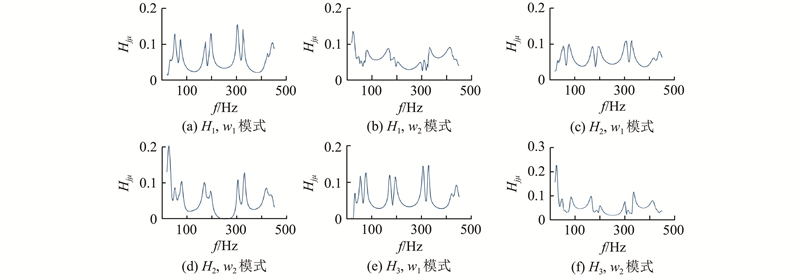
图 4 NMF分解后不同高度下各协同模式的肌肉激活系数
Fig.4 Muscle activation coefficient of each synergistic mode at different height after NMF decomposition
图 5

图 5 NMF分解后不同高度各协同模式的基矩阵
Fig.5 Basis matrix of various synergy mode at different height after NMF decomposition
图 6
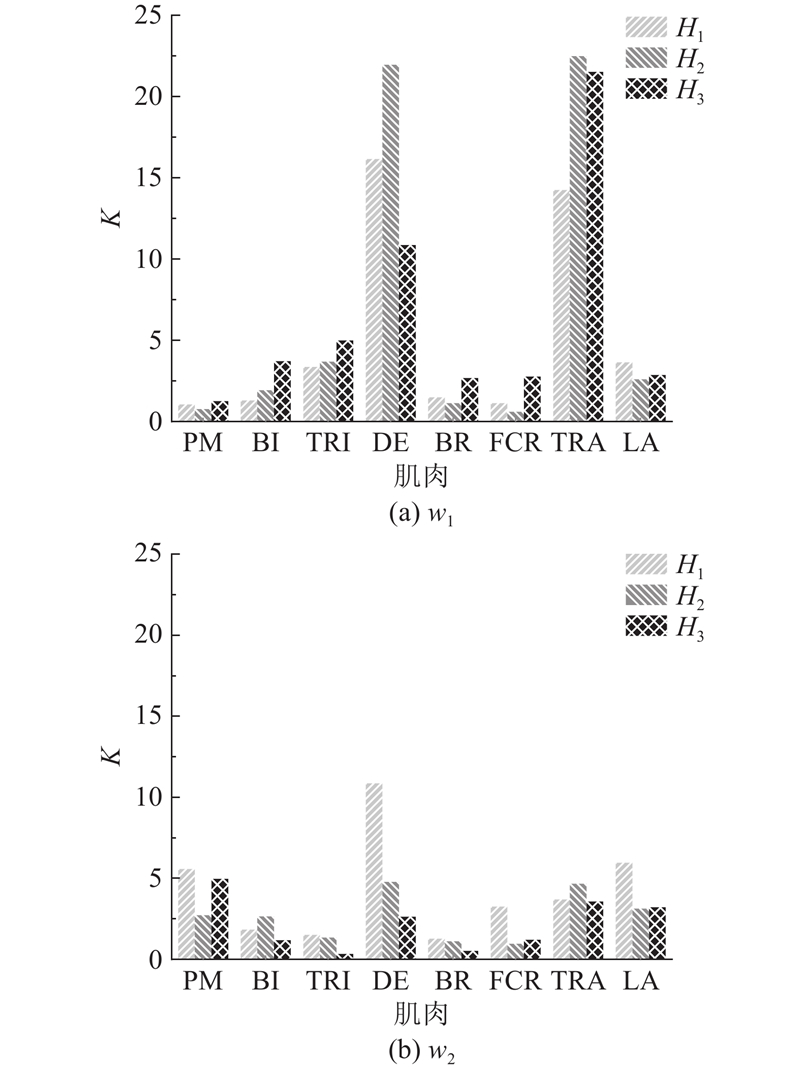
对不同高度下的各肌肉信息流出量的总和进行最大值归一化处理,结果如表1所示. 其中,Kf为总信息流出量的归一化结果.
表 1 上肢肌肉总信息流出量的归一化结果
Tab.1
| 高度 | 模式 | Kf | |||||||
| PM | BI | TRI | DE | BR | FCR | TRA | LA | ||
| H1 | w1 | 0.064 | 0.080 | 0.207 | 1.000 | 0.092 | 0.071 | 0.882 | 0.225 |
| H1 | w2 | 0.514 | 0.167 | 0.139 | 1.000 | 0.117 | 0.300 | 0.340 | 0.548 |
| H2 | w1 | 0.034 | 0.085 | 0.164 | 0.976 | 0.050 | 0.026 | 1.000 | 0.115 |
| H2 | w2 | 0.571 | 0.554 | 0.282 | 1.000 | 0.234 | 0.201 | 0.977 | 0.654 |
| H3 | w1 | 0.059 | 0.173 | 0.232 | 0.505 | 0.124 | 0.128 | 1.000 | 0.133 |
| H3 | w2 | 1.000 | 0.237 | 0.068 | 0.530 | 0.106 | 0.245 | 0.721 | 0.648 |
从表1可得不同高度下的w1、w2模式共同作用情况. 对不同高度下协同模式的肌肉激活系数和信息流出量进行显著性检验,显著性水平均大于0.05,表明不同高度下的协同模式无显著性差异. 其中不同高度下w1的协同肌肉均为DE和TRA. w2模式的协同肌肉略有不同,其中H1高度下的协同肌肉为PM、DE、LA,H2高度下的协同肌肉为PM、BI、DE、TRA、LA,H3高度下的协同肌肉为PM、DE、TRA、LA.
由于w1流出的信息量远高于w2,且整体激活系数更高,可以认为w1为主协同模式,即在过头作业实验中,2种不同的协同模式是以w1为主导发挥主要作用,w2为辅助,共同配合完成过头作业.
在过头作业中,w1模式反映了不同高度作业上肢肌间协同的一致性. 表1表明,DE和TRA的总信息流出量最多,当过头作业时,DE和TRA共同作用,使肩膀和手臂保持稳定,实现协调的抬举动作. w2模式反映了肌间协同是动态调整过程,不同的高度与作业姿势要求不同肌肉配合完成特定任务,从而调整每个肌肉的活动强度. 在H1高度下,PM、DE和LA协同作用,随着过头作业高度的提升,BI和TRA被招募,表明作业高度的提升增加了作业难度,需要更多肌肉协调配合完成作业.
4. 复杂网络的构建
图 7
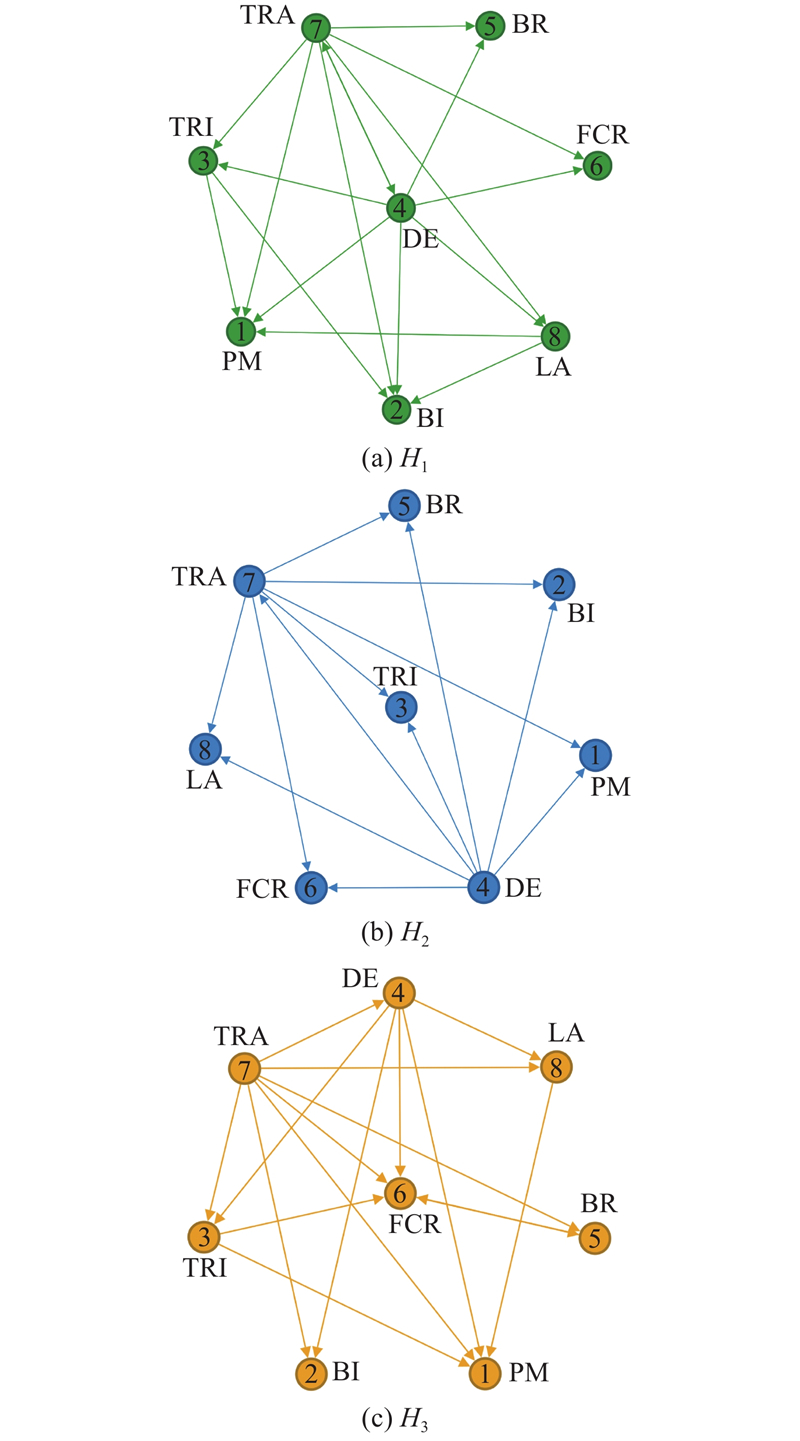
从图7可知,在3个不同高度的肌肉功能网络中,TRA和DE与其他上肢肌肉建立的边的连接数均最多,H2高度网络边的连接数最少.
表 8 不同高度下的网络参数
Tab.8
| 高度 | D | C | L |
| H1 | 4.500 | 0.895 | 1.000 |
| H2 | 3.250 | 0.833 | 1.012 |
| H3 | 4.250 | 0.808 | 1.105 |
平均度与网络节点间的边数密切相关,边数增加,则网络的平均度随之增加,表明肌肉间连接强度增强. 平均聚类系数描述的是任意两节点间互相关联的概率,其值越大则肌间联系越紧密,肌肉功能网络的内部连通性越好. 平均路径长度越短表示信息可以在不同肌肉之间更快速地传递,体现肌肉功能网络的协作效率更高. 总体而言,H1高度下肌肉功能网络的平均度、平均聚类系数、平均路径长度均最优.
5. 结 论
(1)根据全局耦合特性,可以得出3种不同高度下,TRA→PM、TRA→LA和DE→TRI方向的耦合强度显著高于其他肌肉耦合强度. 经计算可知,3种不同高度都是由斜方肌(TRA)和三角肌(DE)流出的信号最多,说明肩部肌肉和其他肌肉的耦合度最高.
(2)3种高度下的最佳协同模式数量均为2,w1模式的协同肌肉均为DE和TRA,w2模式的协同肌肉略有不同. 其中,H1高度下的协同肌肉为PM、DE、LA,H2高度下的协同肌肉为PM、BI、DE、TRA、LA,H3高度下的协同肌肉为PM、DE、TRA、LA. 结合激活系数与信息流量可知,3种不同高度下均由w1为主导,w2为辅助,共同配合完成过头作业.
(3)过头作业高度H1相较于H2和H3,肌肉功能网络的节点连接强度更高,联系更紧密,信息传递效率更高.
以上结论说明,DE和TRA在过头作业中起主要作用,更易积累疲劳,是上肢WMSDs发生的关键因素,在设计过头作业辅助装备与作业姿势改善时应重点关注. 过头作业高度越低,作业人员越能轻松完成过头作业任务. 本研究仅分析了过头作业上肢肌间耦合及协同关系,下一步将结合肌肉疲劳的相关研究,指导维修作业动作的改善与过头作业辅助设备的设计与开发,减小作业人员WMSDs的发生率.
参考文献
过头作业上肢负荷评估研究综述
[J].
Research review of workload assessment for the upper extremities in overhead work
[J].
汽车装配工人工作相关肌肉骨骼损伤危险暴露水平及发病调查研究
[J].
Research on exposure risk level and occurrence of musculoskeletal disorders among automobile assembly workers
[J].
Occupational and individual factors in acute shoulder-neck disorders among industrial workers
[J].
Effect of working position and cold environment on muscle activation level and fatigue in the upper limb during manual work tasks
[J].DOI:10.1016/j.ergon.2020.103035 [本文引用: 1]
Design and ergonomic assessment of a passive head/neck supporting exoskeleton for overhead work use
[J].DOI:10.1016/j.apergo.2022.103699 [本文引用: 1]
The effect of task rotation on activation and fatigue response of rotator cuff muscles during overhead work
[J].DOI:10.1016/j.apergo.2021.103461 [本文引用: 1]
The working shoulder: assessing demands, identifying risks, and promoting healthy occupational performance
[J].DOI:10.1179/1743288X11Y.0000000032 [本文引用: 1]
The effects of hand dominance, fatigue, and sex on muscle activation during a repetitive overhead fatiguing task
[J].DOI:10.1016/j.humov.2023.103149 [本文引用: 1]
Ergonomics assessment of the overhead maintenance of vehicle-mounted radar antenna using digital human modelling
[J].DOI:10.1016/j.ijadr.2023.09.001 [本文引用: 1]
汽车底盘维修中单手上举操作对肌肉疲劳的影响研究
[J].DOI:10.3969/j.issn.1672-5581.2022.3.zggcjxxb202203007 [本文引用: 1]
Research on the influence of single hand lifting operation on muscle fatigue in automobile chassis maintenance
[J].DOI:10.3969/j.issn.1672-5581.2022.3.zggcjxxb202203007 [本文引用: 1]
Effects of exoskeleton design and precision requirements on physical demands and quality in a simulated overhead drilling task
[J].DOI:10.1016/j.apergo.2019.05.014 [本文引用: 1]
Objective and subjective effects of a passive exoskeleton on overhead work
[J].DOI:10.1109/TNSRE.2019.2945368 [本文引用: 1]
设备、姿势对手过头作业肌肉疲劳的影响研究
[J].
Research on the effects of equipment and posture on muscle fatigue in overhead tasks
[J].
Control of fast reaching movements by muscle synergy combination
[J].DOI:10.1523/JNEUROSCI.0830-06.2006 [本文引用: 1]
Combinations of muscle synergies in the construction of a natural motor behavior
[J].
Developing new intermuscular coordination patterns through an electromyographic signal-guided training in the upper extremity
[J].DOI:10.1186/s12984-023-01236-2 [本文引用: 1]
Abnormal functional corticomuscular coupling after stroke
[J].DOI:10.1016/j.nicl.2018.04.004 [本文引用: 1]
Muscle synergies and coherence networks reflect different modes of coordination during walking
[J].
卒中后上肢肌间协同耦合分析研究
[J].DOI:10.3969/j.issn.1004-1699.2020.10.003
Study on limb intermuscular synergy and coupling after stroke
[J].DOI:10.3969/j.issn.1004-1699.2020.10.003
基于传递熵与广义偏定向相干性的肌间耦合分析
[J].
Intermuscular coupling analysis based on transfer entropy and generalized partial directed coherence
[J].
基于表面肌电非负矩阵分解与一致性的肌间协同-耦合关系研究
[J].DOI:10.3969/j.issn.0258-8021.2017.02.004 [本文引用: 1]
Research on the intermuscular synergy and coupling analysis based on surface EMG nonnegative matrix factorization-coherence
[J].DOI:10.3969/j.issn.0258-8021.2017.02.004 [本文引用: 1]
基于变分模态分解-相干分析的肌间耦合特性
[J].DOI:10.7498/aps.66.068701 [本文引用: 1]
Intermuscular coupling characteristics based on variational mode decomposition-coherence
[J].DOI:10.7498/aps.66.068701 [本文引用: 1]
Partial directed coherence: a new concept in neural structure determination
[J].DOI:10.1007/PL00007990 [本文引用: 1]
Learning the parts of objects by non-negative matrix factorization
[J].
Intermuscular coherence contributions in synergistic muscles during pedaling
[J].DOI:10.1007/s00221-015-4262-4 [本文引用: 1]
Emergence of scaling in random networks
[J].DOI:10.1126/science.286.5439.509 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}