[1]
何川, 封坤, 方勇 盾构法修建地铁隧道的技术现状与展望
[J]. 西南交通大学学报 , 2015 , 50 (1 ): 97 - 109
[本文引用: 1]
HE Chuan, FENG Kun, FANG Yong Review and prospects on constructing technologies of metro tunnels using shield tunnelling method
[J]. Journal of Southwest Jiaotong University , 2015 , 50 (1 ): 97 - 109
[本文引用: 1]
[2]
訾谦. 我国盾构技术驶入数智发展快车道[N]. 光明日报, 2024–11–20(3).
[本文引用: 1]
[3]
沈恺, 张森, 李胜腾, 等 基于摄影测量的盾构隧道轮廓快速检测方法
[J]. 铁道学报 , 2021 , 43 (10 ): 136 - 146
[本文引用: 1]
SHEN Kai, ZHANG Sen, LI Shengteng, et al A rapid shield tunnel profile measuring method based on close-range photogrammetry
[J]. Journal of the China Railway Society , 2021 , 43 (10 ): 136 - 146
[本文引用: 1]
[4]
WANG Y, LIAO W, DONG A, et al High-speed acquisition and intelligent tunnel surface defects recognition
[J]. Tunnelling and Underground Space Technology , 2024 , 144 : 105572
DOI:10.1016/j.tust.2023.105572
[本文引用: 1]
[5]
TAN L, CHEN X, HU X, et al. DMDSNet: a computer vision-based dual multi-task model for tunnel bolt detection and corrosion segmentation [C]// Proceedings of the IEEE 26th International Conference on Intelligent Transportation Systems . Bilbao: IEEE, 2023: 4827–4833.
[6]
宋娟, 贺龙喜, 龙会平 基于深度学习的隧道衬砌多病害检测算法
[J]. 浙江大学学报: 工学版 , 2024 , 58 (6 ): 1161 - 1173
[本文引用: 1]
SONG Juan, HE Longxi, LONG Huiping Deep learning-based algorithm for multi defect detection in tunnel lining
[J]. Journal of Zhejiang University: Engineering Science , 2024 , 58 (6 ): 1161 - 1173
[本文引用: 1]
[7]
葛双双, 高玮, 汪义伟, 等 我国交通盾构隧道病害、评价及治理研究综述
[J]. 土木工程学报 , 2023 , 56 (1 ): 119 - 128
[本文引用: 1]
GE Shuangshuang, GAO Wei, WANG Yiwei, et al Review on evaluation and treatment of traffic shield tunnel defects in China
[J]. China Civil Engineering Journal , 2023 , 56 (1 ): 119 - 128
[本文引用: 1]
[8]
NIKRAVESH S M Y, GOUDARZI M A review paper on looseness detection methods in bolted structures
[J]. Latin American Journal of Solids and Structures , 2017 , 14 (12 ): 2153 - 2176
DOI:10.1590/1679-78254231
[本文引用: 1]
[9]
REDDY M S B, PONNAMMA D, SADASIVUNI K K, et al Sensors in advancing the capabilities of corrosion detection: a review
[J]. Sensors and Actuators A: Physical , 2021 , 332 : 113086
DOI:10.1016/j.sna.2021.113086
[11]
许敏娟, 陈莹莹, 刘浩 基于全景图像的隧道渗漏水病害识别方法
[J]. 铁道学报 , 2023 , 45 (8 ): 184 - 192
[本文引用: 1]
XU Minjuan, CHEN Yingying, LIU Hao Identification method of tunnel water leakage based on panoramic image
[J]. Journal of the China Railway Society , 2023 , 45 (8 ): 184 - 192
[本文引用: 1]
[12]
TAN L, TANG T, YUAN D An ensemble learning aided computer vision method with advanced color enhancement for corroded bolt detection in tunnels
[J]. Sensors , 2022 , 22 (24 ): 9715
DOI:10.3390/s22249715
[本文引用: 1]
[13]
周中, 闫龙宾, 张俊杰, 等 基于YOLOX-G算法的隧道裂缝实时检测
[J]. 铁道科学与工程学报 , 2023 , 20 (7 ): 2751 - 2762
[本文引用: 1]
ZHOU Zhong, YAN Longbin, ZHANG Junjie, et al Real-time detection of tunnel cracks based on YOLOX-G algorithm
[J]. Journal of Railway Science and Engineering , 2023 , 20 (7 ): 2751 - 2762
[本文引用: 1]
[14]
GU Y, AI Q, XU Z, et al Cost-effective image recognition of water leakage in metro tunnels using self-supervised learning
[J]. Automation in Construction , 2024 , 167 : 105678
DOI:10.1016/j.autcon.2024.105678
[本文引用: 1]
[15]
GUO Z, CHENG X, XIE Q, et al Spatial adaptive improvement detection network for corroded bolt detection in tunnels
[J]. Buildings , 2024 , 14 (8 ): 2560
DOI:10.3390/buildings14082560
[本文引用: 1]
[16]
LI X, WANG Q, YANG X, et al Track fastener defect detection model based on improved YOLOv5s
[J]. Sensors , 2023 , 23 (14 ): 6457
DOI:10.3390/s23146457
[本文引用: 1]
[17]
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Las Vegas: IEEE, 2016: 779–788.
[本文引用: 1]
[18]
JOCHER, G, CHAURASIA, A, QIU, J, et al. YOLO by Ultralytics (Version 8.0. 0) [EB/OL]. [2024–12–03]. https://github.com/ultralytics/ultralytics.
[本文引用: 1]
[19]
WANG X, LIU J Vegetable disease detection using an improved YOLOv8 algorithm in the greenhouse plant environment
[J]. Scientific Reports , 2024 , 14 : 4261
DOI:10.1038/s41598-024-54540-9
[20]
LIU L, LI P, WANG D, et al A wind turbine damage detection algorithm designed based on YOLOv8
[J]. Applied Soft Computing , 2024 , 154 : 111364
DOI:10.1016/j.asoc.2024.111364
[本文引用: 1]
[21]
冉庆东, 郑力新 基于改进YOLOv5的锂电池极片缺陷检测方法
[J]. 浙江大学学报: 工学版 , 2024 , 58 (9 ): 1811 - 1821
[本文引用: 1]
RAN Qingdong, ZHENG Lixin Defect detection method of lithium battery electrode based on improved YOLOv5
[J]. Journal of Zhejiang University: Engineering Science , 2024 , 58 (9 ): 1811 - 1821
[本文引用: 1]
[22]
黄宏伟, 李庆桐 基于深度学习的盾构隧道渗漏水病害图像识别
[J]. 岩石力学与工程学报 , 2017 , 36 (12 ): 2861 - 2871
[本文引用: 1]
HUANG Hongwei, LI Qingtong Image recognition for water leakage in shield tunnel based on deep learning
[J]. Chinese Journal of Rock Mechanics and Engineering , 2017 , 36 (12 ): 2861 - 2871
[本文引用: 1]
[23]
QIU S, CAI B, WANG W, et al Automated detection of railway defective fasteners based on YOLOv8-FAM and synthetic data using style transfer
[J]. Automation in Construction , 2024 , 162 : 105363
DOI:10.1016/j.autcon.2024.105363
[本文引用: 1]
[24]
YANG J, LI C, DAI X, et al Focal modulation networks
[J]. Advances in Neural Information Processing Systems , 2022 , 35 : 4203 - 4217
[本文引用: 1]
[25]
TAN M, PANG R, LE Q V. EfficientDet: scalable and efficient object detection [C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition . Seattle: IEEE, 2020: 10778–10787.
[本文引用: 1]
[27]
TONG Z, CHEN Y, XU Z, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism [EB/OL]. (2023–04–08)[2024–12–03]. https://arxiv.org/pdf/2301.10051.
[本文引用: 2]
[28]
DE MELO LIMA B P, DE ARAÚJO BARBOSA BORGES L, HIROSE E, et al A lightweight and enhanced model for detecting the Neotropical brown stink bug, Euschistus heros (Hemiptera: Pentatomidae) based on YOLOv8 for soybean fields
[J]. Ecological Informatics , 2024 , 80 : 102543
DOI:10.1016/j.ecoinf.2024.102543
[本文引用: 1]
[29]
AKYON F C, ONUR ALTINUC S, TEMIZEL A. Slicing aided hyper inference and fine-tuning for small object detection [C]// Proceedings of the IEEE International Conference on Image Processing . Bordeaux: IEEE, 2022: 966–970.
[本文引用: 1]
[30]
TAN L, HU X, TANG T, et al A lightweight metro tunnel water leakage identification algorithm via machine vision
[J]. Engineering Failure Analysis , 2023 , 150 : 107327
DOI:10.1016/j.engfailanal.2023.107327
[本文引用: 1]
[31]
REN S, HE K, GIRSHICK R, et al Faster R-CNN: towards real-time object detection with region proposal networks
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2017 , 39 (6 ): 1137 - 1149
DOI:10.1109/TPAMI.2016.2577031
[本文引用: 1]
[32]
WANG C Y, YEH I H, MARK LIAO H Y. YOLOv9: learning what you want toLearn using programmable gradient information [C]// Computer Vision – ECCV 2024 . [S.l.]: Springer, 2025: 1–21.
[本文引用: 1]
[33]
WANG A, CHEN H, LIU L, et al. YOLOv10: real-time end-to-end object detection [EB/OL]. (2024–10–30)[2024–12–03]. https://arxiv.org/pdf/2405.14458.
[本文引用: 1]
[34]
邓伟, 王洪亮 基于级联网络的螺栓锈蚀检测方法研究
[J]. 现代电子技术 , 2023 , 46 (19 ): 111 - 115
[本文引用: 1]
DENG Wei, WANG Hongliang Research on bolt corrosion detection method based on cascade network
[J]. Modern Electronics Technique , 2023 , 46 (19 ): 111 - 115
[本文引用: 1]
[35]
WALDAMICHAEL F G, DEBELEE T G, AYANO Y M Coffee disease detection using a robust HSV color-based segmentation and transfer learning for use on smartphones
[J]. International Journal of Intelligent Systems , 2022 , 37 (8 ): 4967 - 4993
DOI:10.1002/int.22747
[本文引用: 1]
[36]
中国工程建设标准化协会. 城市轨道交通盾构隧道结构病害检测技术规程: T/CECS 788—2020 [S]. 北京: 中国建筑工业出版社, 2020: 1.
[本文引用: 1]
盾构法修建地铁隧道的技术现状与展望
1
2015
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
盾构法修建地铁隧道的技术现状与展望
1
2015
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
1
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
基于摄影测量的盾构隧道轮廓快速检测方法
1
2021
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
基于摄影测量的盾构隧道轮廓快速检测方法
1
2021
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
High-speed acquisition and intelligent tunnel surface defects recognition
1
2024
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
基于深度学习的隧道衬砌多病害检测算法
1
2024
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
基于深度学习的隧道衬砌多病害检测算法
1
2024
... 盾构法作为安全、环保、快速的建设手段,在地铁隧道修建中有广泛应用[1 ] . 截至2024年,中国城市轨道交通建设盾构法施工占比超过90%[2 ] . 随着服役时间增加,隧道结构不可避免地出现各种病害. 病害的出现不仅影响结构耐久性,还严重危害结构安全性[3 ] . 地铁盾构隧道的衬砌病害检测[4 -6 ] 是当今研究关注的热点,隧道衬砌的安全性直接影响地铁运行安全与效率. ...
我国交通盾构隧道病害、评价及治理研究综述
1
2023
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
我国交通盾构隧道病害、评价及治理研究综述
1
2023
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
A review paper on looseness detection methods in bolted structures
1
2017
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
Sensors in advancing the capabilities of corrosion detection: a review
0
2021
Automatic defect detection and segmentation of tunnel surface using modified Mask R-CNN
1
2021
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
基于全景图像的隧道渗漏水病害识别方法
1
2023
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
基于全景图像的隧道渗漏水病害识别方法
1
2023
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
An ensemble learning aided computer vision method with advanced color enhancement for corroded bolt detection in tunnels
1
2022
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
基于YOLOX-G算法的隧道裂缝实时检测
1
2023
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
基于YOLOX-G算法的隧道裂缝实时检测
1
2023
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
Cost-effective image recognition of water leakage in metro tunnels using self-supervised learning
1
2024
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
Spatial adaptive improvement detection network for corroded bolt detection in tunnels
1
2024
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
Track fastener defect detection model based on improved YOLOv5s
1
2023
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
1
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
1
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
Vegetable disease detection using an improved YOLOv8 algorithm in the greenhouse plant environment
0
2024
A wind turbine damage detection algorithm designed based on YOLOv8
1
2024
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
基于改进YOLOv5的锂电池极片缺陷检测方法
1
2024
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
基于改进YOLOv5的锂电池极片缺陷检测方法
1
2024
... 在地铁盾构隧道中,管片衬砌是支护结构的主体,是决定隧道质量、安全和使用寿命的关键[7 ] . 管片的固定以及管片间的连接均由管片螺栓实现. 螺栓暴露在空气中,与水分和污染物接触,易使钢材料锈蚀[8 -10 ] ,从而影响螺栓的机械性能及其抗拉强度,导致螺栓松动和破损,带来渗漏水、管片松动,甚至脱落等危险后果,影响行车安全. 因此,管片螺栓锈蚀检测对于盾构隧道的安全使用至关重要. 传统人工检测效率低、主观因素影响大、成本高[11 ] ,巡视员必须在非运行时间(如夜间和清晨)检查所有螺栓. 通常10~15名训练有素的巡视人员检查2~3 km的隧道区间大约需要3 h,人工成本昂贵且低效[12 ] . 随着计算机视觉的不断发展,基于深度学习的检测方法得到越来越多的关注. 该方法既可以有效弥补人工检测的不足,也可以通过数据处理对隧道状态进行分析预测. 周中等[13 ] 提出YOLOX-G隧道衬砌裂缝图像检测算法,实现对隧道裂缝的实时检测;Gu等[14 ] 采用自监督的隧道渗漏水识别方法,在大幅减小标注量的同时保证了较好的识别效果;Guo等[15 ] 提出改进空间自适应的锈蚀螺栓检测网络,它能够自适应地关注重要区域并减少干扰特征,提高检测精度. 基于深度学习的目标检测算法主要有2个类别,分别是二阶段检测算法和一阶段检测算法. 二阶段检测算法须对图像生成一系列候选区域,再进行候选区域内目标的分类和定位. 一阶段检测算法可直接预测目标的位置和类别,无需生成候选区域. 相较而言,一阶段检测算法的准确率略低,但检测速度快,模型尺寸小,更便于在工程领域的部署和应用[16 -17 ] . 地铁巡检时间有限,对模型实时性的要求较高,因此一阶段检测算法更适用于隧道螺栓锈蚀检测任务,其中YOLOv8[18 -20 ] 的检测效果与实时性较好,研究与应用广泛[21 ] . ...
基于深度学习的盾构隧道渗漏水病害图像识别
1
2017
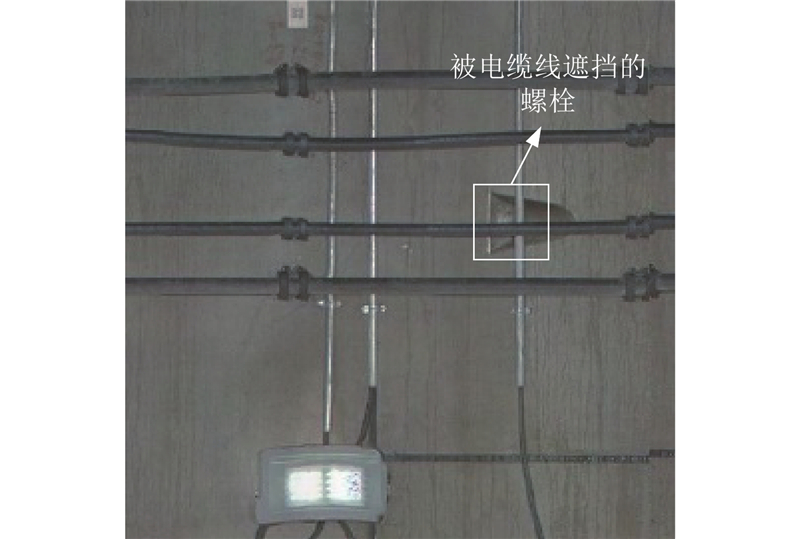
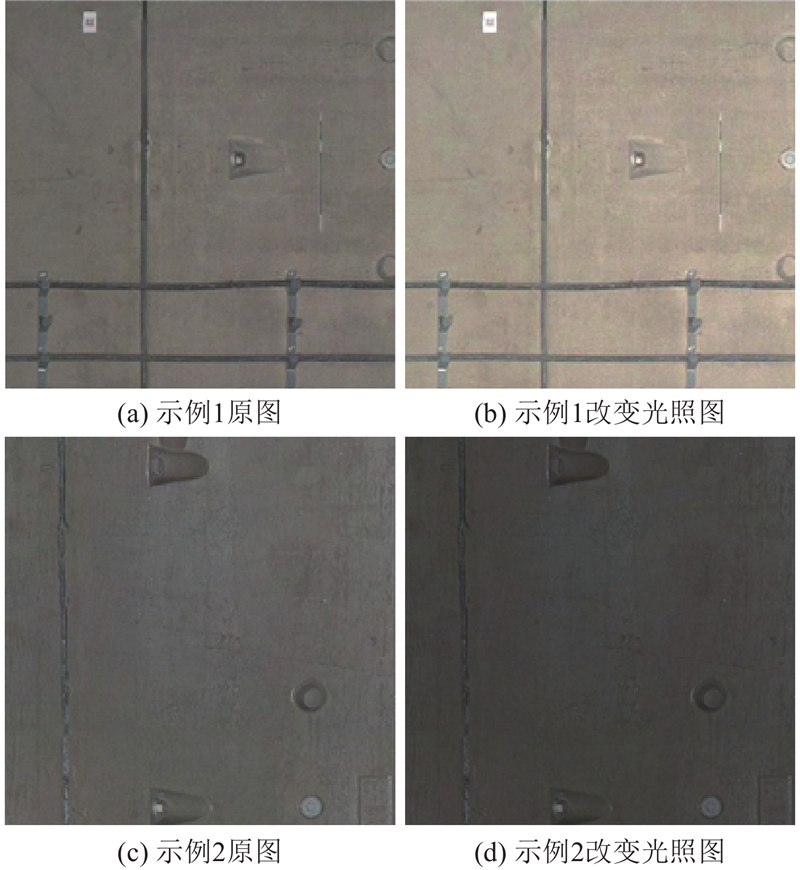
... 将深度学习算法搭载到无人机或者检测台车上,沿着隧道线路进行隧道病害检测的方法能够大大降低人工成本,但是锈蚀螺栓检测仍存在以下问题. 1)螺栓尺寸较小,不易发现,当采集设备进行隧道衬砌整体扫描时,存在扫描图像中的螺栓目标小的问题;2)地铁盾构是处于弱光环境下的一维地下管状结构,衬砌表面有特殊的曲率,伴有管片拼缝、电力线缆、管道、螺栓孔、灌浆孔、LED 灯等影响图像识别的干扰物[22 ] ,存在扫描图像中的螺栓被遮挡的问题;3)隧道内不同位置的亮度和光线不同,锈蚀螺栓检测模型须具备优越的泛化能力,才能保证不同光照下的检测精度. ...
基于深度学习的盾构隧道渗漏水病害图像识别
1
2017
... 将深度学习算法搭载到无人机或者检测台车上,沿着隧道线路进行隧道病害检测的方法能够大大降低人工成本,但是锈蚀螺栓检测仍存在以下问题. 1)螺栓尺寸较小,不易发现,当采集设备进行隧道衬砌整体扫描时,存在扫描图像中的螺栓目标小的问题;2)地铁盾构是处于弱光环境下的一维地下管状结构,衬砌表面有特殊的曲率,伴有管片拼缝、电力线缆、管道、螺栓孔、灌浆孔、LED 灯等影响图像识别的干扰物[22 ] ,存在扫描图像中的螺栓被遮挡的问题;3)隧道内不同位置的亮度和光线不同,锈蚀螺栓检测模型须具备优越的泛化能力,才能保证不同光照下的检测精度. ...
Automated detection of railway defective fasteners based on YOLOv8-FAM and synthetic data using style transfer
1
2024
... YOLOv8模型由3个部分组成:负责特征提取的主干网络(backbone),实现特征融合的颈部网络(neck)和检测头(head). 主干网络参考CSPDarknet-53的结构,将卷积核个数为1 024的卷积层删除,把卷积核为3×3卷积(Conv)改为特征提取能力更强的C2f(CSP bottleneck with 2 convolutions),再对第5层的特征图进行快速空间金字塔池化(spatial pyramid pooling fast, SPPF). 颈部网络采用路径聚合特征金字塔网络(path aggregation network with feature pyramid network, PAN-FPN)结构,将上采样中的卷积操作删除. 检测头为解耦头结构,将检测头和分类头分离,放弃基于锚点(anchor based)的策略,使用无锚点(anchor free)的方法,通过检测对象的中心并估计中心与边界框间的距离来定位对象[23 ] . ...
Focal modulation networks
1
2022
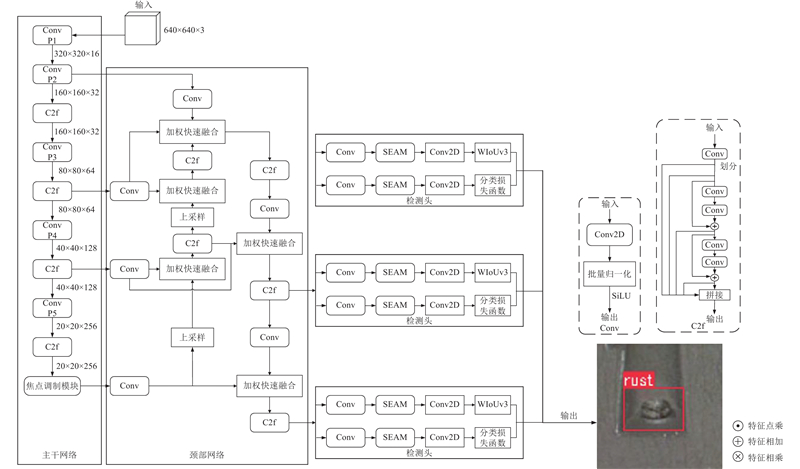
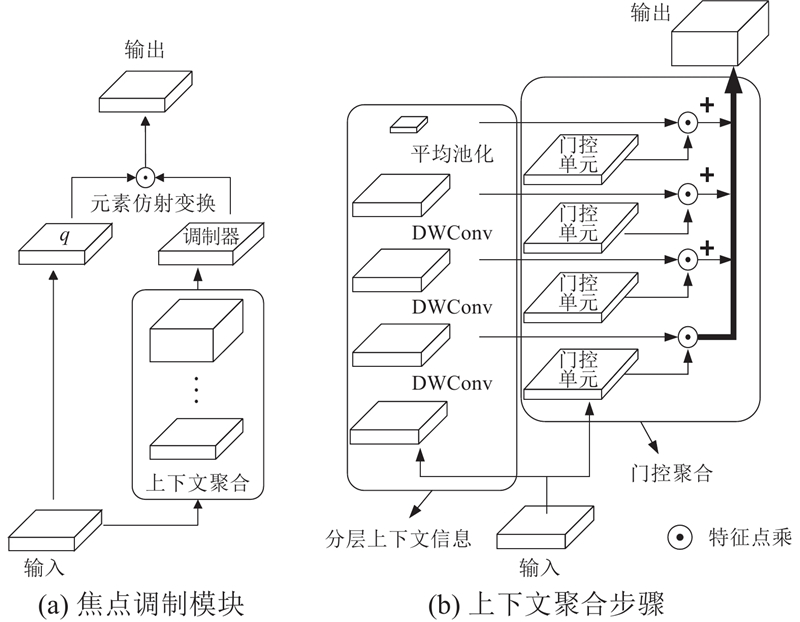
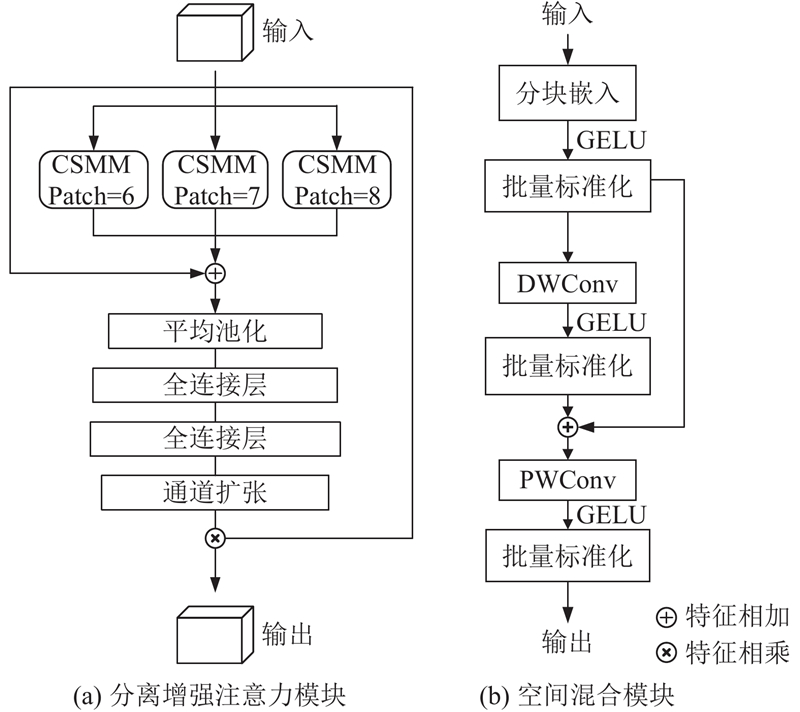
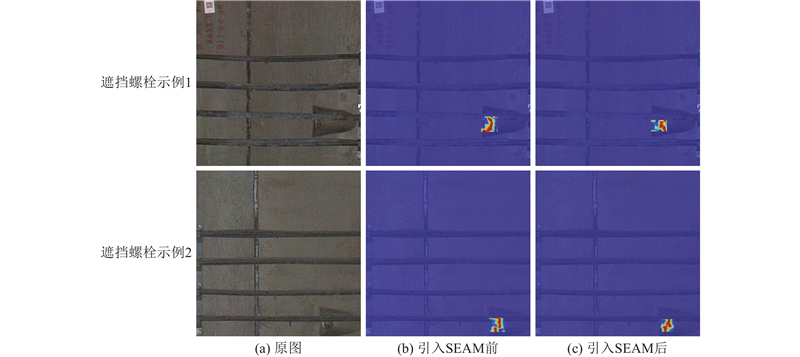
... 针对盾构隧道锈蚀螺栓检测任务,进行YOLOv8n模型改进,改进YOLOv8模型结构如图1 所示. 1)将主干网络中的SPPF替换为焦点调制模块(focal modulation, FM)[24 ] ,再将PAN-FPN升级为加权双向特征金字塔网络(bidirectional feature pyramid network, BiFPN)[25 ] ;2)检测头引入分离增强注意力模块(separated and enhancement attention module, SEAM)[26 ] ;3)将边界框的回归损失函数改进为Wise-IoU v3[27 ] . ...
1
... 针对盾构隧道锈蚀螺栓检测任务,进行YOLOv8n模型改进,改进YOLOv8模型结构如图1 所示. 1)将主干网络中的SPPF替换为焦点调制模块(focal modulation, FM)[24 ] ,再将PAN-FPN升级为加权双向特征金字塔网络(bidirectional feature pyramid network, BiFPN)[25 ] ;2)检测头引入分离增强注意力模块(separated and enhancement attention module, SEAM)[26 ] ;3)将边界框的回归损失函数改进为Wise-IoU v3[27 ] . ...
YOLO-FaceV2: a scale and occlusion aware face detector
1
2024
... 针对盾构隧道锈蚀螺栓检测任务,进行YOLOv8n模型改进,改进YOLOv8模型结构如图1 所示. 1)将主干网络中的SPPF替换为焦点调制模块(focal modulation, FM)[24 ] ,再将PAN-FPN升级为加权双向特征金字塔网络(bidirectional feature pyramid network, BiFPN)[25 ] ;2)检测头引入分离增强注意力模块(separated and enhancement attention module, SEAM)[26 ] ;3)将边界框的回归损失函数改进为Wise-IoU v3[27 ] . ...
2
... 针对盾构隧道锈蚀螺栓检测任务,进行YOLOv8n模型改进,改进YOLOv8模型结构如图1 所示. 1)将主干网络中的SPPF替换为焦点调制模块(focal modulation, FM)[24 ] ,再将PAN-FPN升级为加权双向特征金字塔网络(bidirectional feature pyramid network, BiFPN)[25 ] ;2)检测头引入分离增强注意力模块(separated and enhancement attention module, SEAM)[26 ] ;3)将边界框的回归损失函数改进为Wise-IoU v3[27 ] . ...
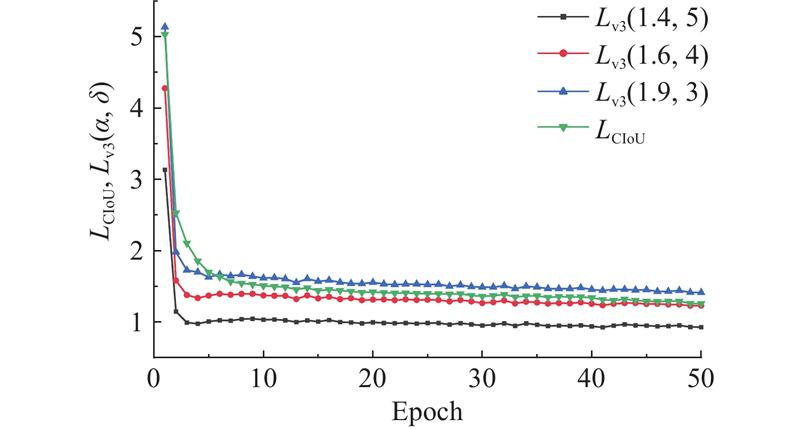
... 将YOLOv8n作为基础模型,设置迭代次数为200,批量大小为32,优化器为SGD(初始学习率为0.01,最终学习率为0.000 1,权重衰减为0.000 5,动量因子为0.937),进行改进YOLOv8模型的训练. 为了得到收敛效果更好的损失函数,进行针对α 和δ 的超参数选择实验,结果对比图如图9 所示,其中Epoch为迭代轮次. 对比L v3 提供的3组超参数α =1.4、δ =5,α =1.6、δ =4,α =1.9、δ =3[27 ] 以及L CIoU 的收敛程度与收敛速度,采用收敛速度更快收敛程度更好的超参数组,即α =1.4、δ =5. ...
A lightweight and enhanced model for detecting the Neotropical brown stink bug, Euschistus heros (Hemiptera: Pentatomidae) based on YOLOv8 for soybean fields
1
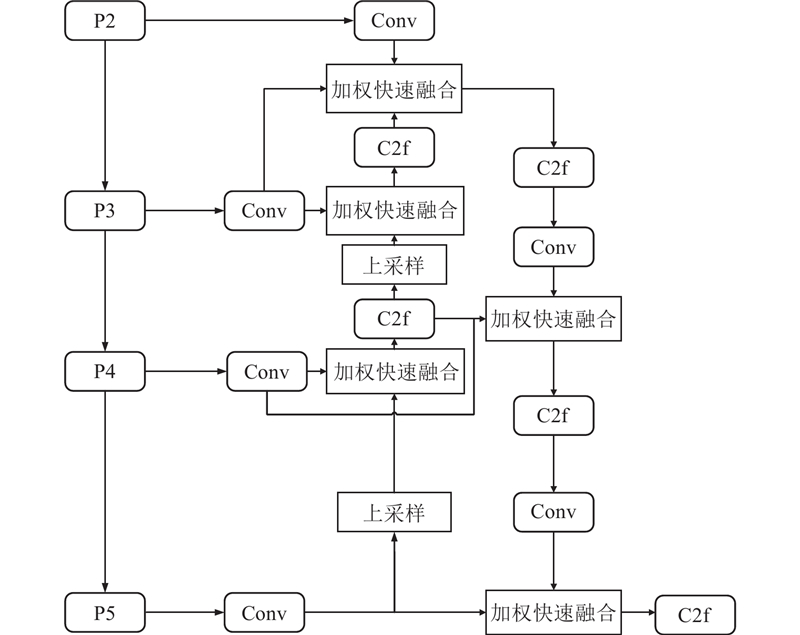
2024
... 在主干网络中,随着卷积的深入,大目标的特征容易保留,小目标的特征容易丢失. 为了更好地保留小目标的特征并进行特征融合,替换颈部网络的PAN-FPN为如图3 所示的BiFPN. 1)BiFPN在特征图尺寸相同的输入和输出间增加了1条额外的分支,在不增加太多计算量的同时融合更多的特征,如P4层经过Conv操作后,存在1条分支直接与输出节点进行融合. 2)BiFPN使用加权的快速标准化融合,既能放大重要的信息,也能提高融合的效率. 3)特征金字塔网络中的P2层包含许多细节特征,可以帮助识别网络中其他层遗漏的小目标. 融合P2层,可以使颈部网络变得更加深刻,计算层更多,更好地学习输入图像的复杂表示,并提取更多细节特征,特别是针对小目标的检测任务[28 ] . 本研究融合P2层的特征,实现4个级别的特征融合. ...
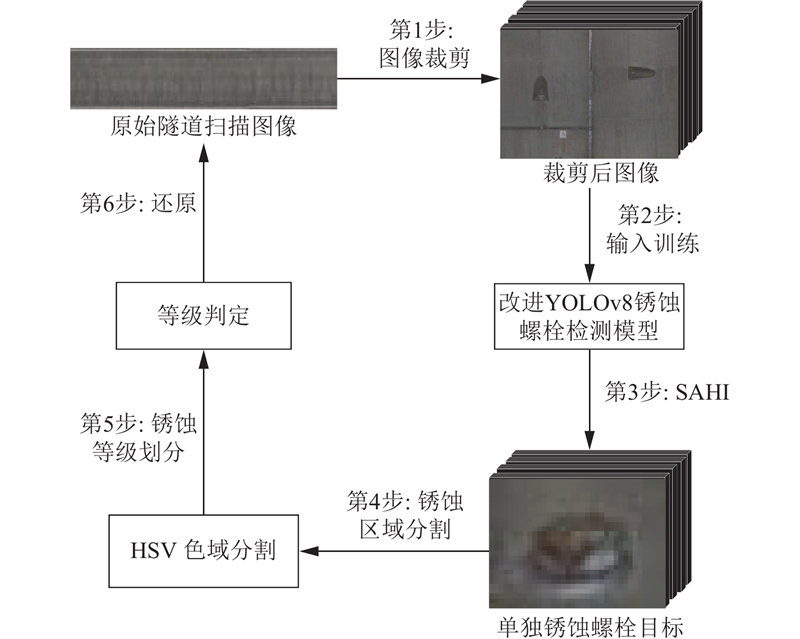
1
... 将数据处理分为前期处理与后期处理2个部分. 前期处理为图像裁剪,建立用于模型训练的数据集;后期处理应用于预测阶段,借助切片辅助推理(slicing aided hyper inference, SAHI)[29 ] 实现对大尺寸隧道图像的预测. 改进YOLOv8模型的技术路线如图6 所示. ...
A lightweight metro tunnel water leakage identification algorithm via machine vision
1
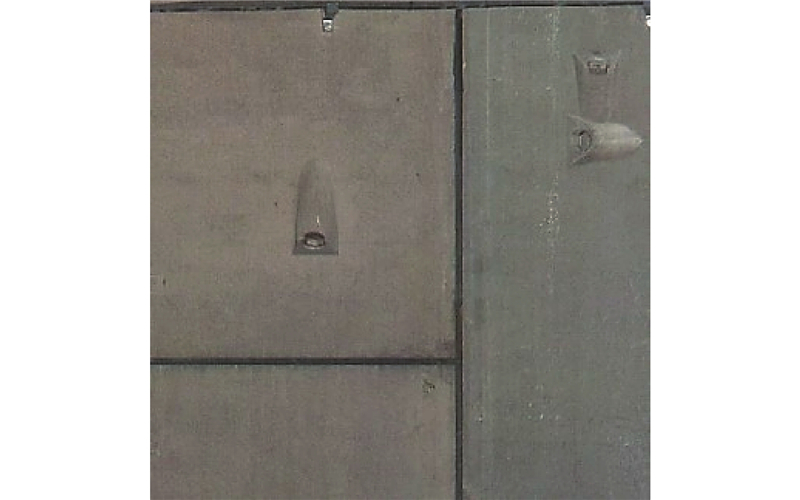
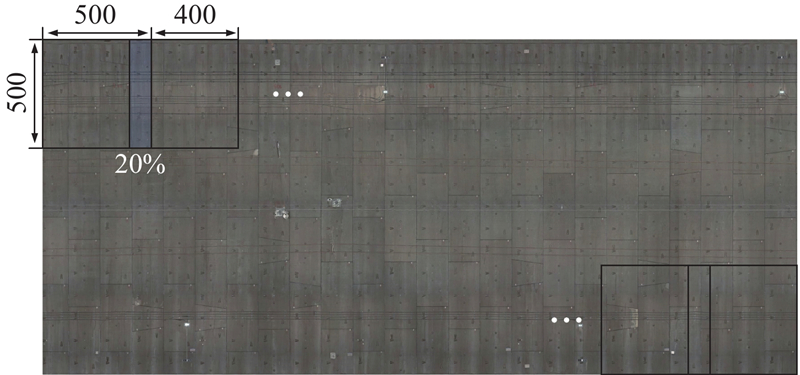
2023
... 扫描设备扫描的图像若尺寸过大将无法输入训练(1 km的扫描图像大约有6.42 GB[30 ] ),为此使用图像裁剪方法,将原始扫描图像裁剪为易于人工标注并可输入训练的图像. 如图7 所示,在尺寸为 500×500 的样本中,螺栓清晰,易于肉眼观察到螺栓是否发生锈蚀. 将隧道原始扫描图像裁剪为大量尺寸为500×500的图片,利于人工进行标注,输入模型训练时调整尺寸为640×640. ...
Faster R-CNN: towards real-time object detection with region proposal networks
1
2017
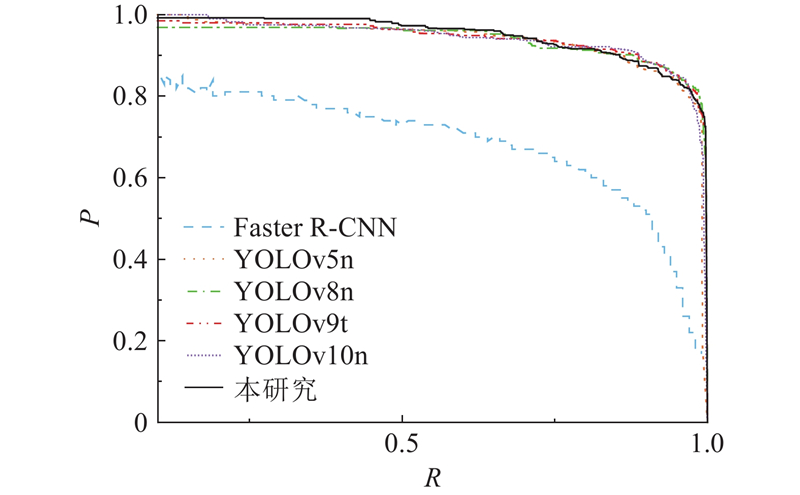
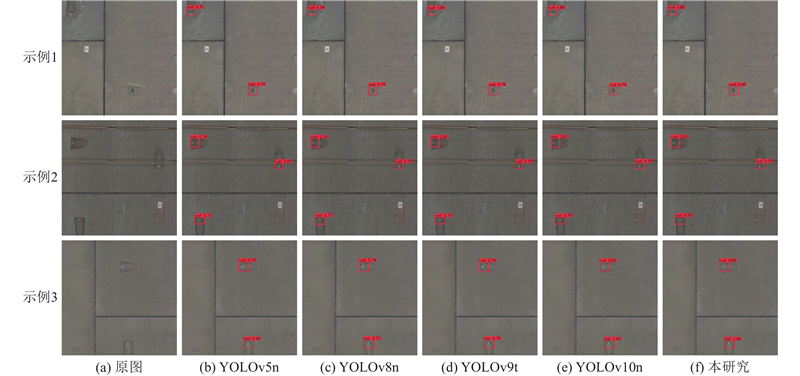
... 在相同的数据集、参数和训练设备的前提下,训练Faster R-CNN[31 ] 、YOLOv5n、YOLOv8n、YOLOv9t[32 ] 、YOLOv10n[33 ] ,进行模型性能对比. 由于准确率和召回率无法直接衡量模型的检测精度,将准确率-召回率曲线与F1分数纳入评估指标. F1分数综合考虑了精确率与召回率,F1分数越大,模型检测性能越好. F1分数的计算式为 ...
1
... 在相同的数据集、参数和训练设备的前提下,训练Faster R-CNN[31 ] 、YOLOv5n、YOLOv8n、YOLOv9t[32 ] 、YOLOv10n[33 ] ,进行模型性能对比. 由于准确率和召回率无法直接衡量模型的检测精度,将准确率-召回率曲线与F1分数纳入评估指标. F1分数综合考虑了精确率与召回率,F1分数越大,模型检测性能越好. F1分数的计算式为 ...
1
... 在相同的数据集、参数和训练设备的前提下,训练Faster R-CNN[31 ] 、YOLOv5n、YOLOv8n、YOLOv9t[32 ] 、YOLOv10n[33 ] ,进行模型性能对比. 由于准确率和召回率无法直接衡量模型的检测精度,将准确率-召回率曲线与F1分数纳入评估指标. F1分数综合考虑了精确率与召回率,F1分数越大,模型检测性能越好. F1分数的计算式为 ...
基于级联网络的螺栓锈蚀检测方法研究
1
2023
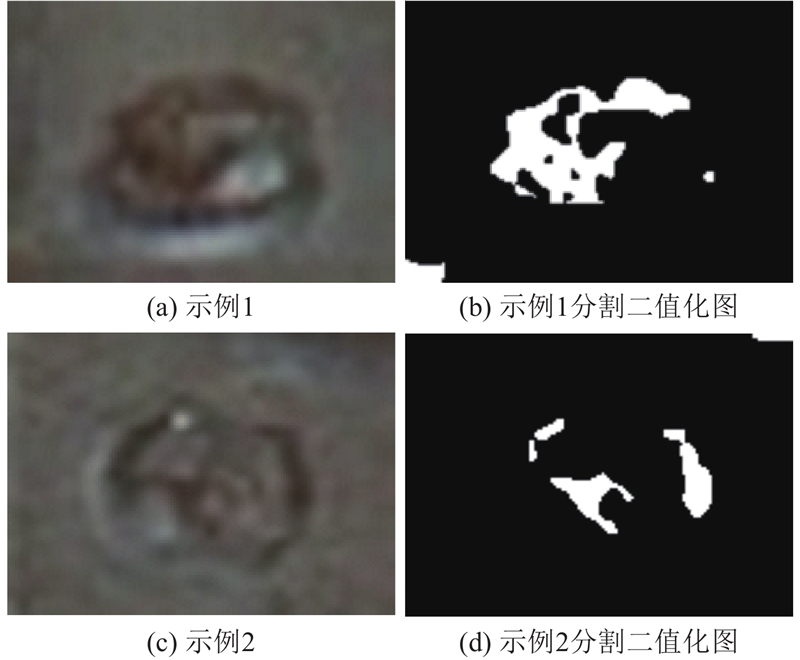
... 隧道扫描图背景颜色比较单一,锈蚀区域与隧道背景主要是颜色上的区别,本研究提出基于HSV色域分割的锈蚀等级判定方法,利用锈蚀螺栓和正常螺栓在HSV颜色空间中的差异,分割锈蚀区域,实现对螺栓锈蚀等级的判定[34 ] . ...
基于级联网络的螺栓锈蚀检测方法研究
1
2023
... 隧道扫描图背景颜色比较单一,锈蚀区域与隧道背景主要是颜色上的区别,本研究提出基于HSV色域分割的锈蚀等级判定方法,利用锈蚀螺栓和正常螺栓在HSV颜色空间中的差异,分割锈蚀区域,实现对螺栓锈蚀等级的判定[34 ] . ...
Coffee disease detection using a robust HSV color-based segmentation and transfer learning for use on smartphones
1
2022
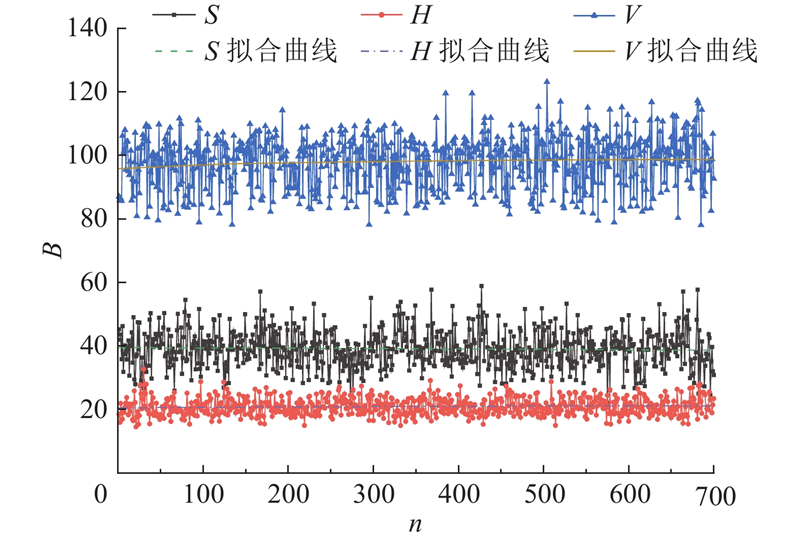
... HSV颜色空间,利用色相H 、饱和度S 、明度V 来描述颜色[35 ] . 基于HSV的色域分割通过确定H 、S 、V 这3条通道的分割阈值,实现对某一颜色或部分相似颜色的分割. 螺栓的锈蚀颜色存在多样性,仅用1张锈蚀螺栓的HSV颜色分布图进行比较,无法代表整体锈蚀区域颜色情况,为此进行多张锈蚀螺栓图片拟合. 为了确定拟合图片的数量n ,通过均值计算,对700张锈蚀螺栓图片的HSV曲线进行拟合. 如图15 所示,H 通道相对平稳;S 通道趋于下降,拟合500 张后稳定;V 通道趋于上升,在拟合600 张后稳定. 因此设定拟合图片数量为700 张. 根据颜色分量B 分布的像素点个数进行拟合,得到拟合700 张锈蚀螺栓图片的HSV颜色分布图,随后通过对比锈蚀螺栓与正常螺栓不同颜色分量下像素点频率f 确定分割阈值. 正常螺栓与锈蚀螺栓HSV颜色分布图对比如图16 所示,锈蚀螺栓的H 通道与S 通道分别在颜色分量50~110和 55~100存在像素点,而正常螺栓在此处不存在像素点. 锈蚀螺栓与正常螺栓的V 通道在颜色分量65~95存在明显差异. 确定分割阈值: ...
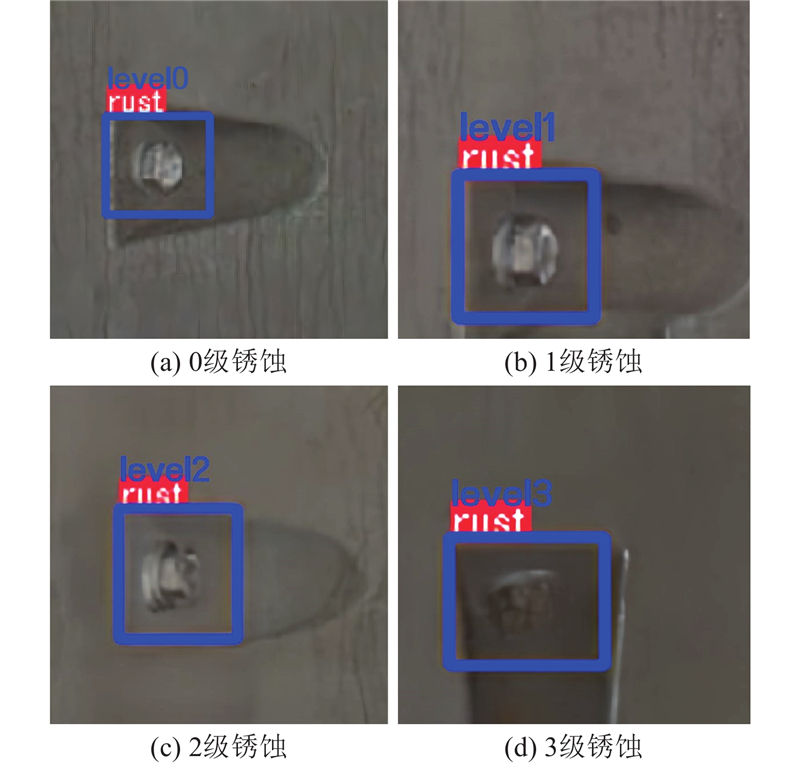
1
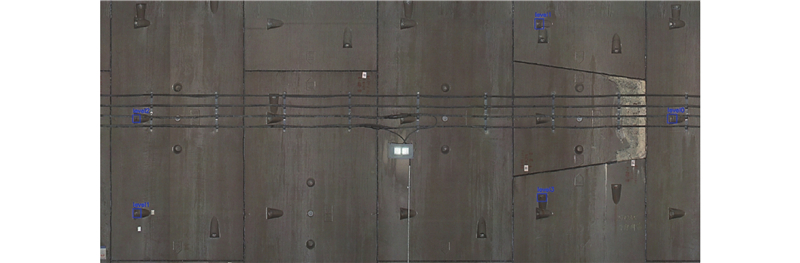
... 式中:N c 为锈蚀区域的像素点总数,N b 为锈蚀螺栓图片的像素点总数. P c 越大,锈蚀等级越高;P c 越小,锈蚀等级越低. 参考文献[36 ],划分螺栓锈蚀级别如表4 所示. 当P c <3%时,可能是尘土等异物遮挡或光线干扰,锈蚀等级判定为0级,锈蚀程度为无锈蚀,无需检修人员前去检修;当3%≤P c <10%时,锈蚀等级判定为1级,锈蚀程度为轻度锈蚀,需检修人员进行除锈处理;当10%≤P c <40%时,锈蚀等级判定为2级,锈蚀程度为中度锈蚀,检修人员须测量螺栓内部锈蚀程度,进行除锈或更换处理;当P c ≥40%时,锈蚀等级判定为3级,锈蚀程度为重度锈蚀,螺栓表面几乎完全锈蚀,检修人员应及时了解螺栓内部锈蚀情况. 各锈蚀等级检测图示例如图18 所示. 算出检测到的螺栓锈蚀等级,将等级信息作为检测框标签,输入原始隧道扫描图像中,帮助检修人员快速定位到带有锈蚀等级的螺栓目标,带有锈蚀等级的部分检测截图如图19 所示. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}