

尽管振动信号蕴含丰富的健康信息,但实际的采集信号常受多源干扰耦合的影响. 利用传统的时频域分析方法,难以有效地分离复合故障特征,尤其当传感器固定于箱体时,各部件的振动信号相互混叠,显著增加了特征提取难度. 稀疏表示技术通过构建匹配字典提取瞬态冲击特征,逐渐成为研究热点. Huang等[7]采用极大极小凹惩罚函数与傅里叶基字典,实现齿轮多分量信号的分离. Wang等[8]基于小波和相关滤波,提出结合瞬态建模和参数识别的旋转机械故障特征检测方法. 通过瞬态周期参数识别实现故障定位. 针对齿轮箱复合故障振动信号的多重特征提取问题,基于Wang等[8]的研究,Li等[9]提出新的多重增强稀疏表示(multiple enhanced sparse decomposition,MESD)方法. 利用MESD算法,能够同时分离和提取齿轮与滚动轴承的谐波分量和瞬态特征,利用广义极大极小凹惩罚(generalized minimax concave,GMC)作为稀疏正则化项,避免了使用L1范数正则化带来的低估高振幅特征分量的影响[10],保证了稀疏表示的准确性. Zhou等[11]构建非对称高斯啁啾模型(asymmetric Gaussian chirplet model,AGCM)时频原子,用于匹配故障脉冲波形,结合探路者算法(pathfinder algorithm,PFA)优化参数匹配.
齿轮箱复杂的传递路径导致轴承故障冲击易被齿轮啮合振动掩盖,现有方法在实测信号处理中面临显著的挑战. 利用稀疏分解算法,虽然能够分离多源瞬态分量,但受限于传感器安装位置导致的信号混叠,在实际应用中存在原子匹配精度下降的问题.
本文聚焦平行轴齿轮箱,提出改进型原子寻优方法,增强MESD算法的工程适用性. 通过优化特征原子匹配机制,为复杂工况下的复合故障诊断提供新思路.
1. 多重增强稀疏表示方法的原理
从齿轮箱中采集到的复合振动信号往往包含较大的噪声,因此齿轮箱信号建模为
式中:
式中:
式中:
引入二阶系统的单位脉冲响应函数来表示故障. 考虑滚动轴承瞬态分量为单侧衰减形式,与拉普拉斯函数的波形相似. 选择拉普拉斯函数来构造滚动轴承的小波基稀疏字典:
考虑到齿轮瞬态分量的波形是双侧衰减的,这与Morlet小波的波形相似. 采用Morlet小波构造齿轮小波基稀疏字典:
式中:
由于
当齿轮系统存在制造或安装错误分布式故障时,齿轮啮合振动的幅值随之发生变化,从而产生谐波分量. 将谐波字典建模为
式中:
在字典构造完成后,稀疏表示的核心问题变成了MESD代价函数的建立和求解. MESD的代价函数可以表示为
式中:
式中:
式中:
代价函数可以表示为
使用FBS(forward-backward splitting,FBS)算法[13]来求解代价函数,以
阈值为
通过上述的迭代过程,可以得到齿轮箱的滚动轴承与齿轮瞬态分量:
2. 最优原子寻优算法的理论基础
2.1. 广义似然比指标
针对现有的统计指标无法很好地区分信号的非高斯性和非平稳性的问题,Antoni等[14]提出能够单独量化非高斯性与非平稳性的统计指标系统方法论. 该方法通过零假设(the null hypotheses)和备择假设(the alternative hypotheses)来区分设备的健康状态和异常状态,每个假设都由不同的概率密度函数来表征.
以
式中:
对GLR取对数以简化计算,对数GLR的结果可以表示为
式中:
式中:
在高斯假设的循环平稳性检验中,
式中:
在高斯假设下,高斯循环平稳(Gaussian cyclostationary,GCS)信号的对数似然函数为
式中:
式中:
在高斯假设下,高斯平稳(Gaussian stationary,GS)信号具有时不变的方差,即
因此,高斯平稳信号的对数似然函数为
式中:
根据式(22)、(26)、(28)可得,测试高斯循环平稳假设与高斯平稳假设的标量指标为
2.2. 非对称高斯啁啾模型
非对称高斯啁啾模型是高斯啁啾模型的扩展. 通过在高斯啁啾模型中引入额外的不对称因子,可以构建具有不对称衰减的小波原子AGCM. AGCM的形式[11]为
式中:
2.3. 脉冲特征增强方法
图 1
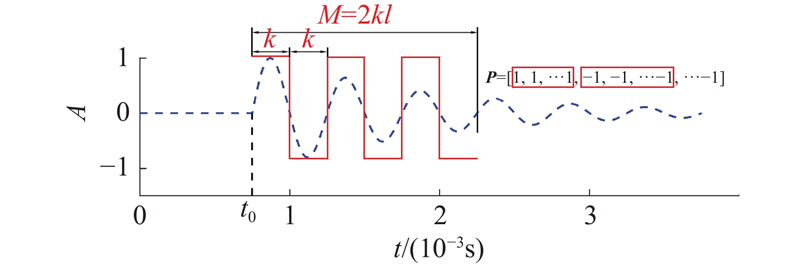
脉冲的衰减振动从
当预先定义的方波
对于一段包含故障冲击的振动信号
为了保持信号的一致性,将原始信号
3. 研究内容
以向量
原始脉冲特征增强方法采用峭度作为最优增强结果的遴选标准. 鉴于峭度对随机冲击具有敏感性,且齿轮的啮合冲击易导致峭度偏大,提出通过构建广义似然比指标
将基于AGCM与脉冲增强的最优字典的MESD方法称为使用最优原子的多种增强稀疏表示方法(multiple enhanced sparse decomposition with optimal atom,MESDOA),MESDOA方法的示意图如图2所示. 图中,
图 2
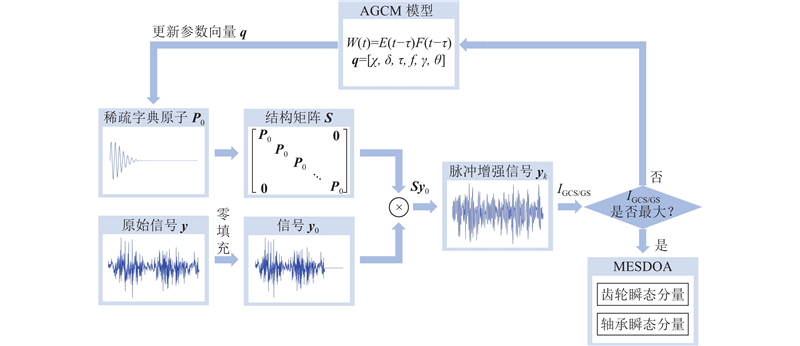
图 2 MESDOA方法最优原子构造的示意图
Fig.2 Schematic diagram of optimal atomic construction of MESDOA method
结合滚动轴承故障冲击与齿轮故障冲击的特点,对AGCM的参数向量
4. 算法实验验证与对比分析
4.1. 实验介绍
图 3

图 4
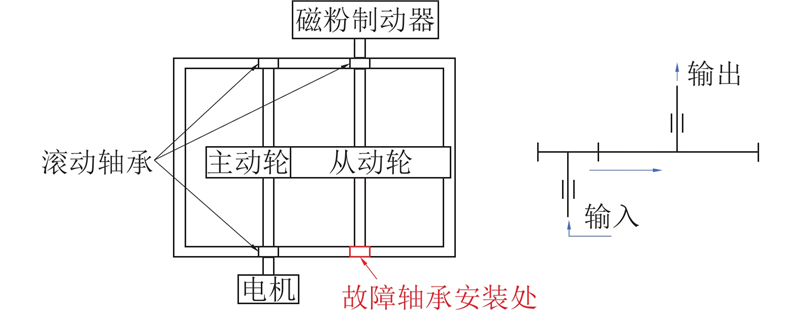
图 4 齿轮箱故障模拟实验台的齿轮箱结构简图
Fig.4 Gearbox structure diagram of gearbox fault simulation test bench
该实验台的主体部分从左到右分别为电机、单级平行轴齿轮箱、磁粉制动器. 电机转速由控制柜控制,实时转速在设定转速上下小幅波动. 单级平行轴齿轮箱为斜齿或直齿齿轮箱,主动轮齿数为30,从动轮齿数为70. 磁粉制动器提供扭矩负载,模拟实际工况. 将振动传感器分别固定于齿轮箱顶部、右侧从动轴附近、前侧、左侧主动轴附近以及后侧. 将振动传感器连接到数采仪,进行振动数据采集,采样频率设置为
图 5
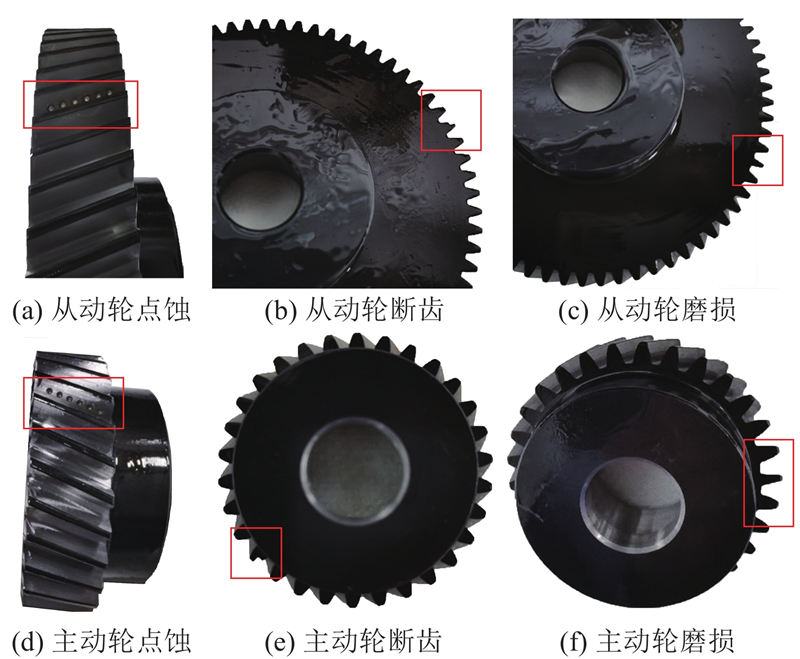
图 6
实验为模拟齿轮箱在常转速条件下的各类齿轮故障与滚动轴承故障. 在实验过程中,主动轴转速从
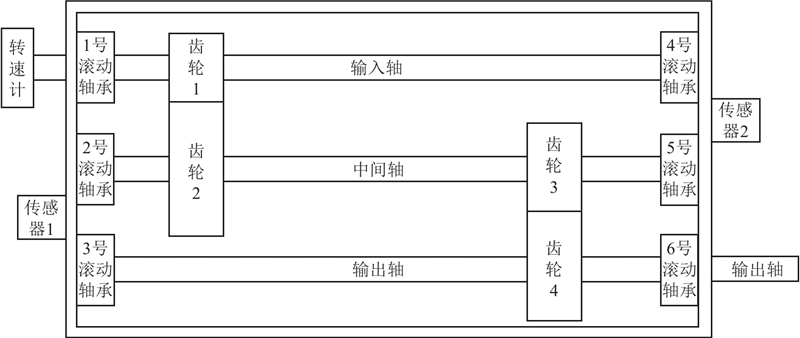
为了保证算法在不同数据集中的有效性,采用PHM 2009齿轮箱数据集[18]作为验证数据集. PHM 2009齿轮箱数据集实验的齿轮箱结构如图7、8所示,振动数据由齿轮箱输入轴侧和输出轴侧的传感器进行采集. 该采集系统使用2种齿轮,即直齿与斜齿,输入轴与中间轴间的齿数比为1∶3,中间轴与输出轴间的齿数比为3∶5. 数据集的振动信号分别在齿轮箱主动轴转速为
图 7
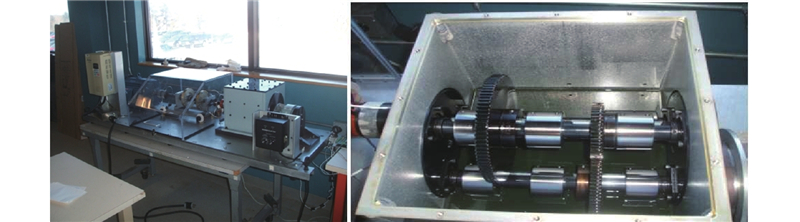
图 7 PHM 2009数据集实验台与齿轮箱内部实物图
Fig.7 PHM 2009 data set experimental bench and gearbox internal physical diagram
图 8
4.2. 算法效果的验证
为了验证MESDOA的效果,以PHM 2009数据集的“直齿7”在主动轴转速为
图 9
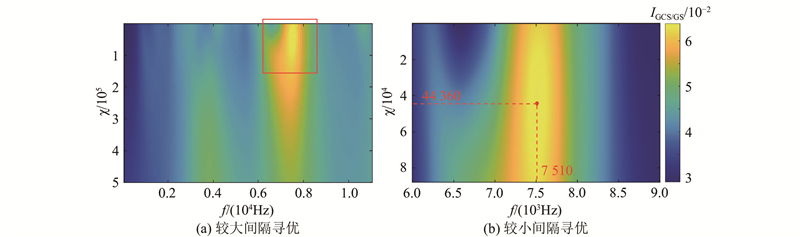
图 9 PHM 2009“直齿7”滚动轴承分量AGCM原子遍历寻优结果图
Fig.9 AGCM atom optimization diagram of spur 7 data of PHM 2009 data set’s rolling bearing component
如图10所示为MESDOA与MESD方法的稀疏表示结果对比. 图中,fBPFI为故障轴承的故障特征频率. 如图10(a)、(b)所示分别为原始信号的频域分析及全频带滤波后的平方包络谱. 由于滚动轴承内环故障特征频率与5倍转频高度接近,利用传统频谱分析方法,难以有效地区分二者. 如图10(c)、(d)所示为利用MESD方法分离出的滚动轴承与齿轮瞬态分量平方包络谱,如图10(e)、(f)所示为MESDOA算法的分离结果. 实验表明,利用2种方法均能够有效地提取滚动轴承瞬态分量,但MESD方法存在信号泄露问题——在齿轮瞬态分量中残留轴承故障特征频率(见图10(d)的箭头标注),利用MESDOA算法分离的齿轮分量仅在0~10 Hz频段存在微弱干扰分量.
图 10
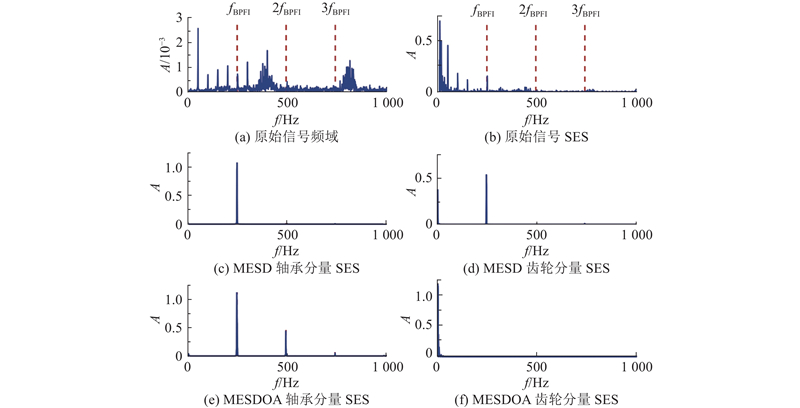
图 10 PHM 2009“直齿7”数据的稀疏表示结果
Fig.10 Sparse representation result of PHM 2009 spur 7 dataset
为了验证轴承和齿轮均发生故障时的结果,使用PHM 2009数据集的“斜齿5”在主动轴转速为
图 11
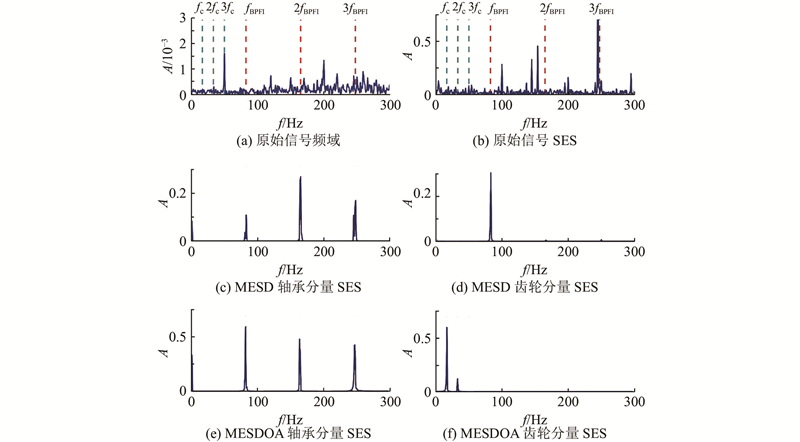
图 11 PHM 2009“斜齿5”数据的稀疏表示结果
Fig.11 Sparse representation result of PHM 2009 helical 5 dataset
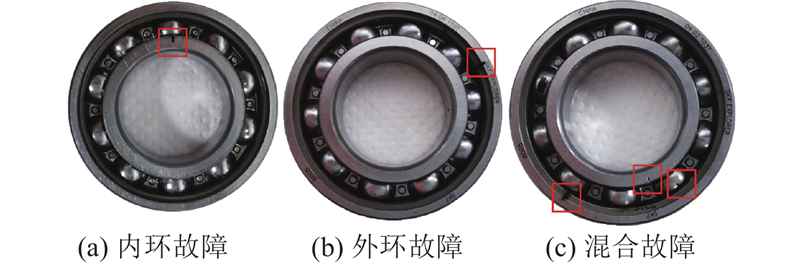
由于齿轮箱故障模拟数据集不包括齿轮与轴承的复合故障,分别以滚动轴承内环故障与斜齿齿轮从动轮断齿在主动轴转速为
图 12
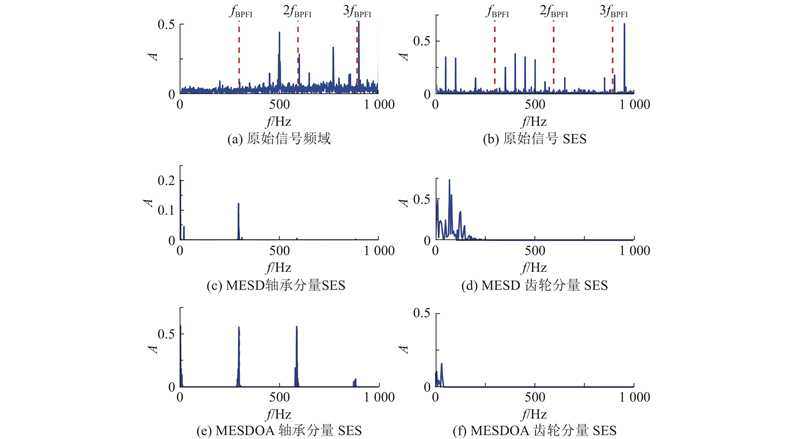
图 12 齿轮箱故障模拟数据集的滚动轴承故障稀疏表示结果
Fig.12 Sparse representation result of rolling bearing fault in gearbox fault simulation data set
图 13
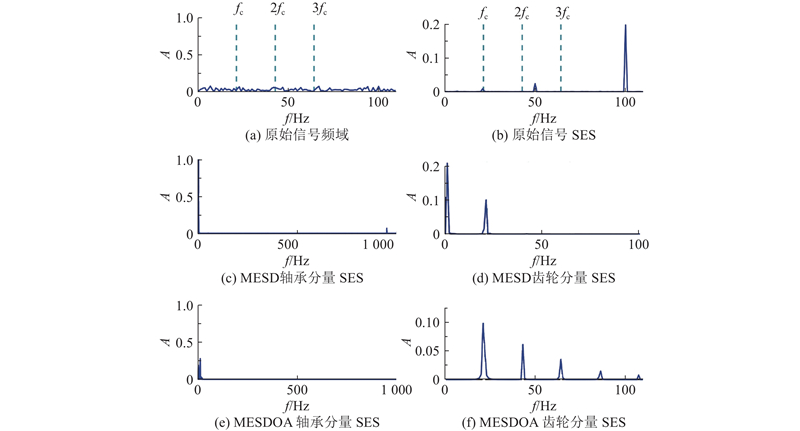
图 13 齿轮箱故障模拟数据集的齿轮故障稀疏表示结果
Fig.13 Sparse representation result of gear fault in gearbox fault simulation dataset
4.3. 算法效果的对比
为了定量地对比MESDOA与其他方法的降噪水平与特征增强性能,引入一些量化指标[2].
使用故障特征指数(fault feature index,FFI),评价SES结果中故障特征频率谱线的明显程度:
式中:
式中:
由于式(34)~(39)中的量化指标是针对含噪信号开发的,而稀疏表示的瞬态分量除故障特征频率外,大部分的频率幅值均为0. 受Hou等[19]将故障频率分量与其他频率分量通过正负符号分隔思想的启发,将平方包络谱中非故障特征频率处的幅值置为负,得到新的双边平方包络谱(double sides SES,DSS).
通过计算双边平方包络谱的和与原平方包络谱之和的比值,得到双边平方包络谱指数(double sides SES index,DSSI),量化原始平方包络谱中故障特征频率及其谐波谱线与无关频率分量的明显程度.
式中:
为了定量评估谐波成分的存在性及显著程度,提出多谐波指数(multiple harmonic index,MHI).
图 14
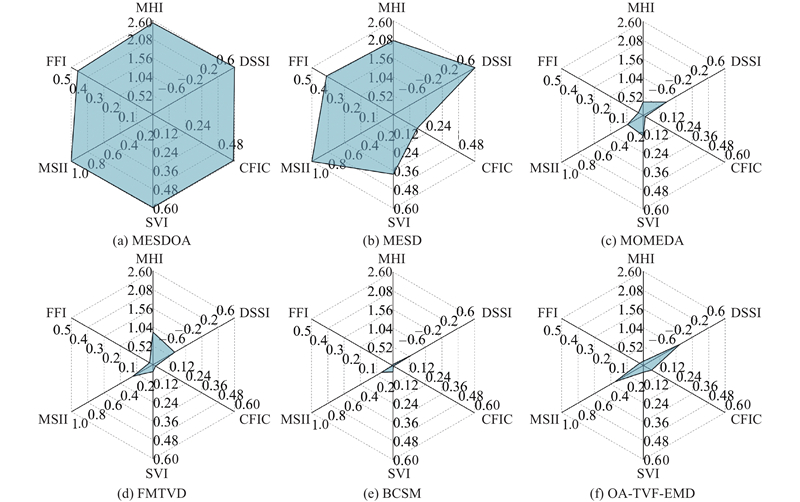
图 14 PHM 2009“斜齿5”数据各方法提取的滚动轴承内环故障特征量化雷达图
Fig.14 Radar chart of rolling bearing inner race fault characteristics extracted by various methods of PHM 2009 helical 5 data
图 15
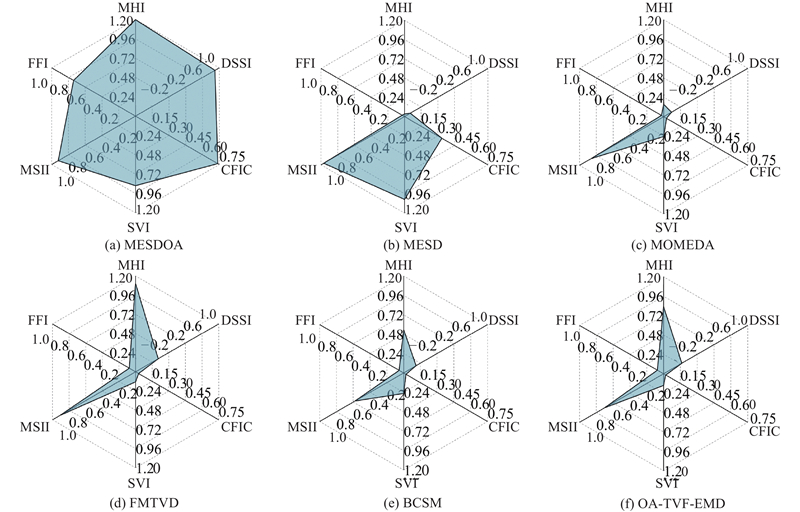
图 15 PHM 2009“斜齿5”数据各方法提取的齿轮故障特征量化雷达图
Fig.15 Radar chart of gear fault characteristics extracted by various methods of PHM 2009 helical 5 data
图 16
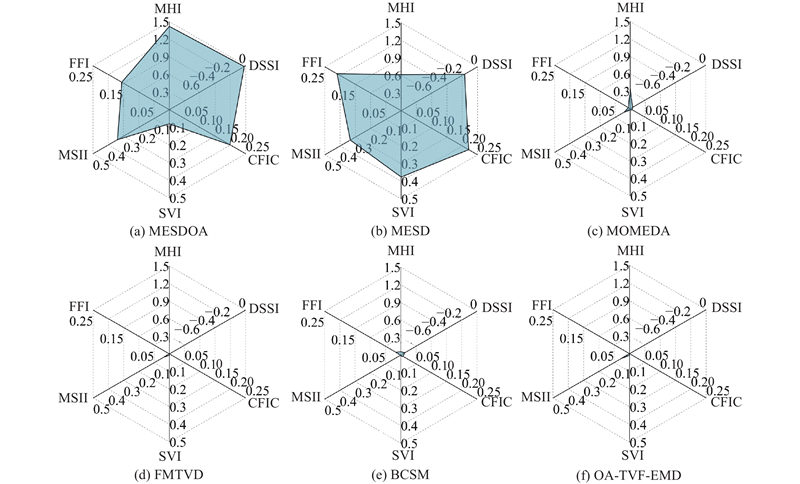
图 16 齿轮箱故障模拟数据集各方法提取的滚动轴承内环故障特征量化雷达图
Fig.16 Radar chart of rolling bearing inner race fault characteristics extracted by various methods of gearbox simulation data set
图 17
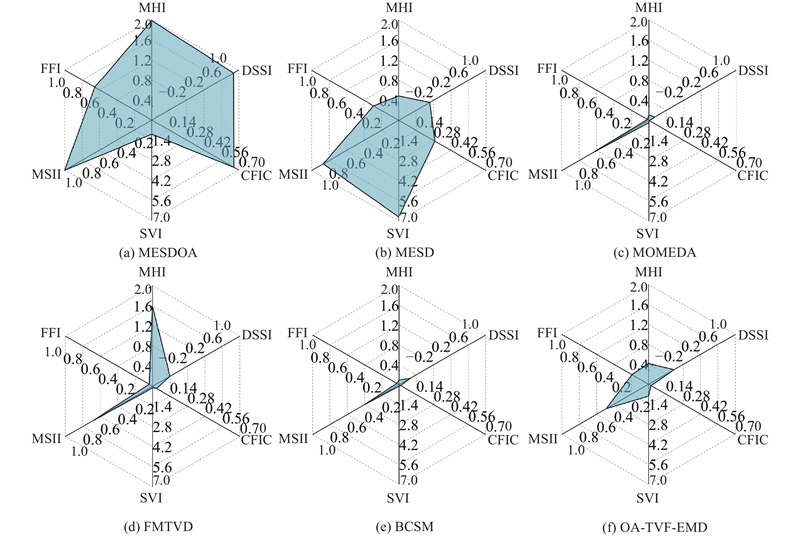
图 17 齿轮箱故障模拟数据集各方法提取的齿轮故障特征量化雷达图
Fig.17 Radar chart of gear fault characteristics extracted by various methods of gearbox simulation data set
各评价指标的最大值均出现在MESDOA或MESD方法中,这表明相较于传统的解卷积和信号分解方法,基于稀疏表示的解决方案具有更优的性能表现. FFI、MSII、SVI和CFIC这4项指标的最优结果在2种稀疏方法间呈现交替分布. 在专门针对稀疏表示特性设计的DSSI和MHI 2项评估指标中,MESDOA方法展现出显著优势,验证了基于优化算法的MESDOA方法在保持信号稀疏表征方面的理论优势.
为了展现目标函数广义似然比
图 18
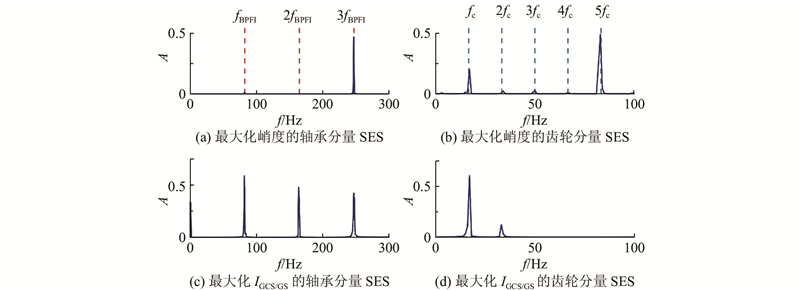
图 18 PHM 2009“斜齿5”数据通过峭度与广义似然比得到的稀疏表示结果
Fig.18 Sparse representation result of PHM 2009 helical 5 data with kurtosis and generalized likelihood ratio index
5. 结 语
本文通过非对称高斯啁啾模型(AGCM)构造出的小波对原始信号进行脉冲特征增强,计算不同参数组合的AGCM进行增强后的信号的广义似然比指标
通过将AGCM与脉冲特征增强方法相结合,利用AGCM与原始信号的“共振”,对原始信号进行脉冲增强,计算脉冲增强后的
参考文献
An operating condition information-guided iterative variational mode decomposition method based on Mahalanobis distance criterion for surge characteristic frequency extraction of the centrifugal compressor
[J].
Acoustic feature enhancement in rolling bearing fault diagnosis using sparsity-oriented multipoint optimal minimum entropy deconvolution adjusted method
[J].
Assessment of gear damage monitoring techniques using vibration measurements
[J].DOI:10.1006/mssp.2001.1392 [本文引用: 1]
Transient modeling and parameter identification based on wavelet and correlation filtering for rotating machine fault diagnosis
[J].DOI:10.1016/j.ymssp.2010.10.013 [本文引用: 3]
Multiple enhanced sparse decomposition for gearbox compound fault diagnosis
[J].
Nonconvex sparse regularization and convex optimization for bearing fault diagnosis
[J].DOI:10.1109/TIE.2018.2793271 [本文引用: 1]
Convolutional sparse coding using pathfinder algorithm-optimized orthogonal matching pursuit with asymmetric Gaussian chirplet model in bearing fault detection
[J].DOI:10.1109/JSEN.2021.3086015 [本文引用: 2]
Sparse regularization via convex analysis
[J].DOI:10.1109/TSP.2017.2711501 [本文引用: 3]
Preconditioning of a generalized forward-backward splitting and application to optimization on graphs
[J].DOI:10.1137/15M1018253 [本文引用: 1]
A statistical methodology for the design of condition indicators
[J].
Rolling bearing fault diagnosis using impulse feature enhancement and nonconvex regularization
[J].
Understanding importance of positive and negative signs of optimized weights used in the sum of weighted normalized Fourier spectrum/envelope spectrum for machine condition monitoring
[J].
Multipoint optimal minimum entropy deconvolution and convolution fix: application to vibration fault detection
[J].
Box-cox-sparse-measures-based blind filtering: understanding the difference between the maximum kurtosis deconvolution and the minimum entropy deconvolution
[J].
An adaptive optimized TVF-EMD based on a sparsity-impact measure index for bearing incipient fault diagnosis
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}