

为了在低信噪比场景中能够更好地检测弱小目标,Wang等[8]提出基于检测前多帧跟踪(multi-frame track-before-detect, MF-TBD)的方法. 与先检测后跟踪的方法不同,检测前跟踪不仅仅是根据某一帧的数据来跟踪,而是累积多帧的数据以积累目标信息,从而进行门限处理,给出估计目标的状态与轨迹. 通过联合多帧信息,能够提高弱小目标的信噪比,但算法复杂度较高. 随后,MF-TBD被广泛应用于雷达系统[9-12],对雷达目标进行检测与跟踪. 这些算法仅使用峰值振幅强度作为区分目标和杂波的主要指标,无法反映不同目标更多的变化特征. Davey等[13]比较了复杂背景下几种基于弱小目标的检测前跟踪方法: 贝叶斯估计、动态规划、粒子滤波方法和直方图概率多假设. 这些方法在研究场景中仅考虑单个目标,没有充分考虑多目标场景. Henriques等[14]提出核相关滤波器(kernel correlation filter, KCF),将原始像素的强度作为特征,但算法大多采用固定大小的外观模板,无法在长时间跟踪中适应多个目标的不同模型变化. 为了解决该问题,Zhou等[15]提出多核相关滤波(multiple KCF, MKCF),利用多个模板来跟踪单个雷达目标,取得了较好的效果,但在信噪比较低的跟踪场景中,仍会出现漏跟现象. Zhou等[16]提出基于多核相关滤波的检测前跟踪算法(MKCF-based TBD, MKCF-TBD),当MKCF模板跨帧估计目标状态时,参考模板和候选模板之间的相似性得分被记录为检验统计量,作为区别目标与杂波的指标,并进行积分以增强对弱目标的检测,但在信噪比较低的情况下,由于海杂波淹没了目标信号,大大增加了检测跟踪的难度,会出现许多虚假航迹.
针对上述问题,本文提出优化多核相关滤波的弱小目标检测前跟踪算法. 引入基于分数阶傅里叶变换(fractional Fourier transform, FRFT)的滤波方法对雷达信号进行预处理,增强目标与海杂波之间的差异性,以便有效地滤除杂波. 提出KCF模板优化提取方法,结合卡尔曼滤波进行目标匹配. 根据目标类型采用不同的模板提取方法,采用最大似然方法融合预测结果,以解决MKCF算法应用多目标跟踪时由于目标之间的相互干扰导致跟踪精度下降的问题. 结合检测前跟踪算法,累积目标多帧信息,实现对雷达弱小目标的最优航迹估计,以解决低信噪比场景下弱小目标难以检测跟踪的问题.
1. 相关工作
1.1. 多核相关滤波
假设目标状态表示为
式中:
给定初始帧中的模板
式中:
式中:
通常,目标外观变化是不可避免的,改变目标模板外观会导致能量扩散,因此提出利用多个KCF,以增强目标模板的多样性[19]. MKCF利用峰值旁瓣比(peak to sidelobe ratio, PSR)来反映模板的变化,从而反映模板的可靠性.
假设在第k个时间步长中存在m个KCF模板
式中:
1.2. 分数阶傅里叶变换
分数阶傅里叶变换是傅里叶变换的一种扩展,它将信号从时域转换到分数阶域,分析信号的相关性和非平稳性[20]. 分数阶傅里叶变换作为一种统一的时频变换,分数阶傅里叶变换随着阶数从0连续增长到1.0,展示出信号从时域逐步变化到频域的所有变化特征,为信号的时频分析提供更大的选择余地.
式中:
当
令
可以看出,式(8)为傅里叶变换,
根据分数阶傅里叶变换的阶数可加性,可以用
对于分数阶傅里叶变换,仅考虑
通过对一维分数阶傅里叶变换的推广,可以扩展到更高维度的分数阶傅里叶变换,实现基于图像的二维分数阶傅里叶变换.
二维分数阶傅里叶变换可以用于信号增强、滤波和特征提取. 通过选择适当的分数阶参数,可以突出感兴趣的频域特性,同时抑制干扰成分. 二维连续分数阶傅里叶变换的核函数可以表示为
式中:
根据一维离散分数阶傅里叶变换的公式和二维连续分数阶傅里叶变换的核可分离性,定义基于二维的离散分数阶傅里叶变换:
由变换核函数的二维可分离性可知,二维的离散分数阶傅里叶变换可由分离的形式定义:
式中:
2. 优化多核相关滤波的弱小目标检测前跟踪算法
提出算法引入分数阶傅里叶变换,将弱小目标从特征不明显的时域变换到幅值变化较明显的分数阶域,在分数阶域对弱小目标进行滤波降噪处理,减少杂波的干扰. 针对MKCF方法模板提取不鲁棒的问题,提出KCF模板优化提取方法,从新生目标及存活目标识别算法中得到存活目标集. 根据目标类型采用不同的模板提取方法,进行目标位置的预测融合,增强目标的跟踪精度. 此外,基于优化多核相关滤波提出检测前多帧跟踪方法,利用多帧信息累积目标航迹,提取疑似目标轨迹集合,得到目标最优航迹的估计.
算法流程如图1所示. 对雷达二维图像进行分数阶傅里叶变换,确定最佳旋转阶数. 利用滤波进行去噪,应用恒虚警检测算法进行检测,得到目标的检测集合. 与上一帧跟踪结果的KF预测集合进行关联,以区分目标类型. 针对不同类型的目标进行相应的MKCF模板优化提取,将符合条件的目标加入疑似航迹中. 联合前3帧的航迹进行最优航迹判断.
图 1
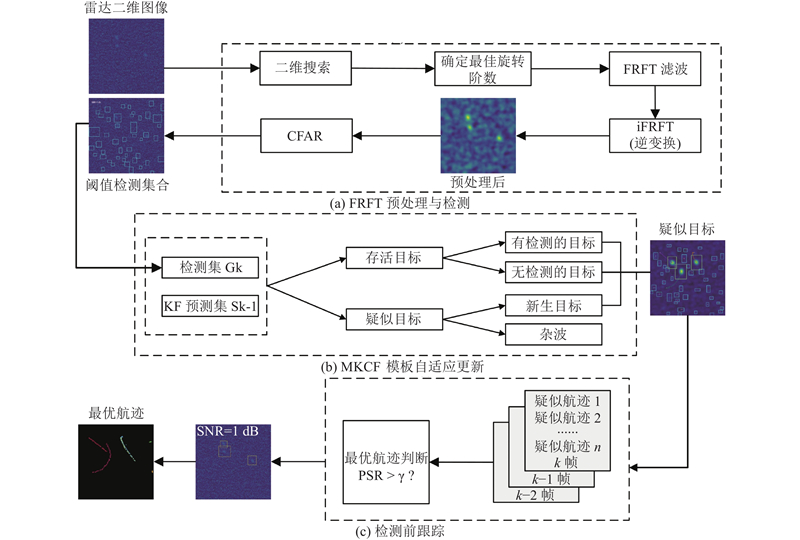
图 1 优化多核相关滤波的弱小目标检测前跟踪算法的流程图
Fig.1 Flowchart of optimized track-before-detect algorithm for weak and small target detection based on improved multi-kernel correlation filtering
2.1. 基于分数阶傅里叶变换的杂波抑制方法
在复杂环境下对雷达弱小运动目标进行检测与跟踪时,会出现由于信噪比过低无法检测出弱小目标的情况,对检测结果的准确度产生影响. 提出对动目标进行检测,利用二维分数阶傅里叶变换的特性对图像进行预处理,通过分数阶傅里叶变换寻找最佳旋转角度,对目标进行滤波降噪处理. 通过CFAR算法得到准确的目标信息,具体的算法流程如图1(a)所示.
2.1.1. 二维FRFT
基于离散的二维分数阶傅里叶变换能够保留分数阶傅里叶变换的性质. 提出算法利用分数阶傅里叶变换,对输入的雷达二维图像进行二维峰值搜索,通过图像的信噪比增益,确定相对最佳的旋转阶数. 在最佳旋转阶次下,对输入的雷达二维图像进行FRFT,同时进行低通滤波,过滤大部分噪声. 对滤波后的信号进行逆分数阶傅里叶变换,还原到时域,得到降噪后的雷达图像,达到杂波抑制的效果.
二维正向和反向的离散分数阶傅里叶变换分别表示为
由FRFT的特性可知,在某一确定阶次,信号与噪声在分数阶傅里叶变换域不再耦合,可以通过滤波器来滤除噪声. 在实验过程中,信号与噪声可能无法通过单一的阶次实现完全解除耦合. 完全耦合信号与噪声是相对复杂的问题,可以通过调整分数阶参数及滤波操作解决. 提出算法通过分级迭代搜索方法搜索得到最佳阶数,实现对信号和噪声不同程度的调控.
2.1.2. 分级迭代
利用分级迭代搜索方法搜索得到最佳旋转阶数,在多个层级上进行迭代搜索,有效地缩小搜索范围并提高搜索效率. 通过联合优化2个方向的阶次,可以考虑2个维度之间的相互作用和依赖,获得更精确的最优解.
在初始阶段,搜索在较大的范围和较粗的粒度上进行,以快速缩小可能的最优解区域. 每个后续的迭代在更细的粒度上进行探索,逐渐精确到最优解.
1)提出算法的旋转阶数的搜索范围为0~1.0,初始搜索步长为
2)利用初次迭代的最佳阶数,计算二次迭代的搜索范围如下:
式中:
3)重复步骤2),得到3次迭代后的最佳阶数
4)将利用FRFT处理后的雷达图像信号进行CFAR处理,得到检测出的目标集合.
2.2. 模板自适应更新
针对弱小目标跟踪过程中,MKCF方法模板提取鲁棒性不强从而影响目标跟踪精度的问题,提出MKCF模板自适应更新方法,提出算法包括目标匹配与模板更新2个阶段. 提出算法将多个KCF的预测结果进行加权融合,得到MKCF的预测结果. 结合卡尔曼滤波进行目标匹配,关联目标的检测集合与预测集合,得到存活目标集合和疑似目标集合. 根据不同的目标类型,采取对应的MKCF模板,增强目标的跟踪精度,具体的算法流程如图1(b)所示.
2.2.1. 目标匹配
提出算法通过目标匹配,将目标分类为存活目标、新生目标和杂波. 根据不同类型的目标,采取不同的模板更新策略,具体的目标匹配方法如下.
1)利用基于分数阶傅里叶变换的CFAR方法,对全局的目标进行检测,得到检测集
2)关联检测集合
式中:
当
3)在从检测集中去除已经确认存活的目标后,剩余的目标集合被称为疑似目标集合. 这些疑似目标可能是新生目标、误检、噪声或其他非目标物体,因此需要进一步的关联和验证. 通过下式关联上一时刻与当前时刻的疑似目标:
当
2.2.2. 模板更新
提出算法根据目标匹配策略,将目标分类为无检测的存活目标、带检测的存活目标、新生目标和杂波. 分别采用不同的模板更新策略,进行有效的目标跟踪和监测. 这不仅有助于提高算法的准确性和效率,还能够为实际应用提供更加可靠和有用的信息. 具体的模板自适应更新策略如下.
1)对于无检测的存活目标,说明当前该目标周围的杂波强度较大,受到的干扰较多,可能是多种原因造成的,比如背景噪声或其他非目标物体的影响. 利用下式更新模板:
式中:
2)对于已经检测到的存活目标,说明当前目标周围的杂波强度较小,目标信号受到的干扰小. 利用下式融合检测框与KCF预测框的结果,得到目标预测结果,旨在结合两者的优势,有效减少单一方法可能带来的误差,提高目标跟踪的稳定性和准确性,得到更准确的目标预测结果.
3)对于新生目标,利用下式计算新生目标预测结果:
将该目标加入目标航迹中,以便后续进行持续跟踪和监测. 提出算法不会立即将新生目标视为可靠的目标,会采用检测前跟踪算法,通过累计多帧信息,进一步验证和确认该新生目标的真实性和轨迹.
2.3. 检测前多帧跟踪
针对强海杂波使算法误将杂波认作目标,导致错误的检测和跟踪,对算法性能造成严重干扰的问题,利用目标在帧间的运动相关性,对多帧数据进行目标信号积累,对杂波进行有效地抑制,以有效地积累目标航迹能量. 具体的算法流程见图1(c).
假设目标可能的轨迹为
式中:
假设目标的位置向量为
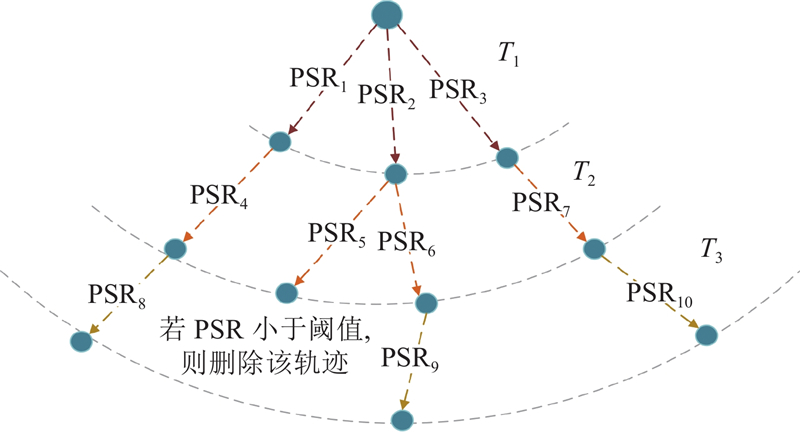
跟踪目标的每条疑似航迹的得分为
式中:
将高PSR值与高IOU值的检测框初始化为新的KCF模板,同时将该PSR值加入该航迹的总PSR值中.
如图2所示,
图 2
3. 实验分析
为了验证提出算法的有效性,对提出算法的性能进行研究,在模拟海杂波数据中与几种相关算法进行详细的比较.
3.1. 评估指标
1)有效轨迹的均方根误差(root mean square error, RMSE):有效轨迹与真实轨迹的平均差.
2)交并集精度(intersection-over-union, IOU):
3)轨迹命中率(rate of hit, ROH):所有轨迹中正确轨迹所占的百分比.
4)轨迹碎片数量(number of trajectory fragments, NTF):组成一条真实轨迹的子轨迹数量. NTF=1为最好的结果. NTF越大,结果越差.
5)检测概率(probability of detection, PD):目标检测框与目标真实框的重叠部分和目标真实框的比值.
6)跟踪精度(precision rate, PR):目标跟踪轨迹中正样本和真实轨迹的比值.
3.2. 场景参数的设置
图 3
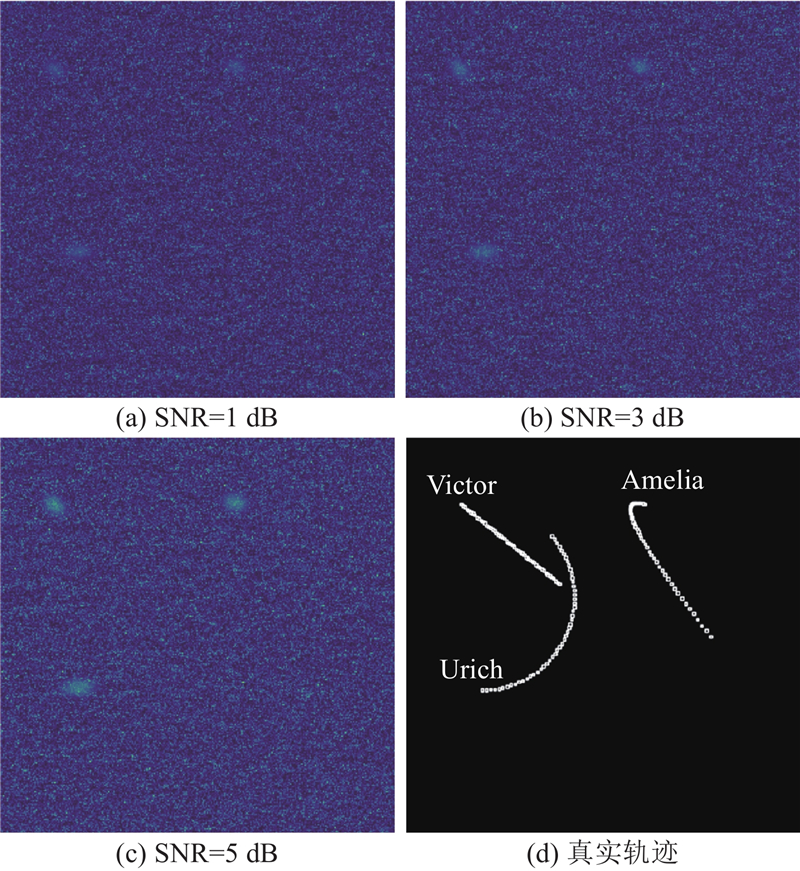
表 1 目标的参数设置
Tab.1
| 目标 | 初始速度 | 加速度 | 转弯率/((°)·s−1) |
| Victor | (1.5, 1.2) | (0, 0) | — |
| Amelia | (1.5, 1.2) | (0.1, 0.1) | — |
| Urich | — | — | 2.62 |
3.3. 定性分析
3.3.1. 分数阶傅里叶变换的实验分析
针对分数阶傅里叶变换的阈值检测算法进行实验,与基于CFAR的优化多核相关滤波检测前跟踪算法、基于傅里叶变换的优化多核相关滤波检测前跟踪算法进行对比,跟踪结果如表2所示. 表中,MIOU为平均交并比.
表 2 不同杂波抑制方法的性能对比
Tab.2
| 方法 | PD | PR | MIOU | ROH | NTF |
| 提出算法+无预处理 | 0.31 | 0.97 | 0.38 | 0.94 | 2.67 |
| 提出算法+FFT | 0.36 | 0.77 | 0.42 | 0.76 | 2.33 |
| 提出算法+FRFT | 0.55 | 0.96 | 0.60 | 0.94 | 1.67 |
基于FRFT的算法的整体跟踪性能优于其他算法. 由于提出算法引入FRFT滤波,有效增强了目标与海杂波的差异,有利于抑制杂波信号. 基于CFAR的算法对杂波的抑制作用较低,会出现大量的虚假轨迹. 基于FFT的预处理方法采用二维傅里叶转换的阈值检测法,可以降低部分杂波干扰,虽然有一定的杂波抑制效果,但是最终的跟踪性能不如提出算法使用的基于分数阶傅里叶变换的杂波抑制方法.
3.3.2. 模板自适应更新实验的分析
为了验证提出算法在低信噪比环境下的有效性,与基于多核相关滤波的检测前跟踪算法(MKCF-TBD)[16]、基于卡尔曼滤波的检测前跟踪算法(KF-TBD)[23]进行对比,结果如表3、4所示. 表3给出跟踪目标的平均交并比、轨迹命中率、轨迹碎片数量的对比结果. 表4给出优化算法与其他算法的均方根误差RMSE的跟踪结果. 采用MKCF-TBD和KF-TBD的方法在针对杂波干扰强的场景下,预测结果偏差较大. 采用优化的MKCF模板预测方法,融合目标KCF预测框和检测框作为最终的跟踪结果,这种融合策略有效提高了跟踪的准确性. 尤其是在存在杂波干扰的复杂环境中,这种融合方法使得跟踪算法能够有效区分目标与干扰杂波,维持跟踪. 在目标被杂波干扰的情况下,能够稳定地跟踪目标,实现动态变化环境下的稳定跟踪.
表 3 不同模板提取方法的性能对比
Tab.3
| 方法 | MIOU | ROH | NTF |
| KF-TBD | 0.08 | 0.52 | 6.33 |
| MKCF-TBD | 0.32 | 0.89 | 5.67 |
| MKCF-TBD+ 优化模板提取方法 | 0.38 | 0.94 | 2.67 |
表 4 不同模板提取方法的均方根误差对比
Tab.4
| 目标 | RMSE | ||
| KF-TBD | MKCF-TBD | MKCF-TBD+ 优化模板提取方法 | |
| Victor | 5.67 | 4.03 | 3.65 |
| Amelia | 5.78 | 4.11 | 3.94 |
| Urich | 5.11 | 4.94 | 4.05 |
3.3.3. 不同信噪比场景下的实验分析
图 4
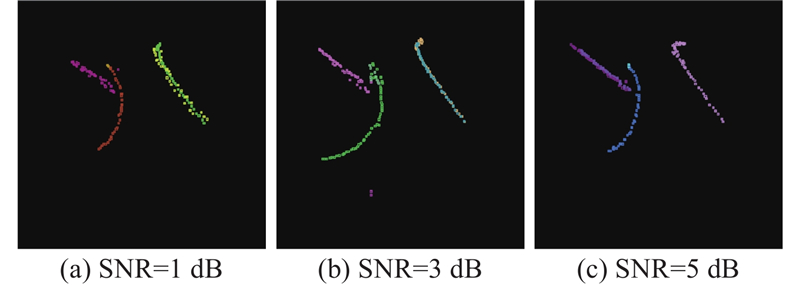
图 4 不同信噪比下的目标跟踪轨迹
Fig.4 Target tracking trajectory for different SNR scenarios
表 5 不同信噪比场景下的均方根误差
Tab.5
| 目标 | RMSE | ||
| SNR=1 dB | SNR=3 dB | SNR=5 dB | |
| Victor | 4.36 | 1.91 | 1.89 |
| Amelia | 4.30 | 2.17 | 2.00 |
| Urich | 3.46 | 2.52 | 1.54 |
从表5可以看出,杂波干扰越来越强,基于分数阶傅里叶变换的检测算法能够抑制杂波,有效跟踪目标. 提出的模板自适应更新方法由于融合目标KCF预测框和检测框作为最终的跟踪结果,使得跟踪算法能够有效区分目标与周围环境中的干扰,维持对目标的持续跟踪. 实验结果表明,提出算法在复杂环境中具有较强的鲁棒性和稳定性. 它能够在强杂波干扰下实现对目标的精确跟踪. 该算法在不同SNR场景下的表现证明其具有广泛的适用性和灵活性.
3.3.4. 不同PSR的实验分析
为了验证在不同的PSR下提出算法的有效性,在SNR=3 dB的仿真数据上进行实验,表6给出提出算法的跟踪结果. 可以看出,当PSR = 8时,提出算法表现出较其他算法更加准确的跟踪能力,这表明提出算法在该条件下对目标的估计与实际情况的偏差最小. 当PSR降至6时,算法性能表现有所下降,这是由于较低的PSR意味着更多的虚假轨迹,影响了算法对目标信号的识别与跟踪准确性. 此外,当PSR = 10时,过高的PSR导致算法在一定程度上可能过滤掉目标部分的真实轨迹,造成跟踪性能的降低.
表 6 不同PSR的均方根误差
Tab.6
| 目标 | RMSE | ||
| PSR = 6 | PSR = 8 | PSR = 10 | |
| Victor | 3.87 | 2.28 | 3.88 |
| Amelia | 3.09 | 2.24 | 3.00 |
| Urich | 3.23 | 2.63 | 3.32 |
3.4. 定量分析
针对提出算法,对提出算法与其他方法的跟踪性能进行评估,对比方法如下.
MM-PF-TBD[24]: 基于多模型的弱机动目标联合检测和跟踪方法,使用贝叶斯理论推导提出基于MM的方法.
SiamMT[25]:基于孪生网络的多目标跟踪方法. SiamMT将单独的视觉跟踪技术以高效的方式应用于多个对象.
RNNMOT[26]:基于循环神经网络和目标外观模型的算法.
MSAR-TBD[11]:两阶段的检测前多帧跟踪算法,对帧上的平方振幅积分进行检测.
WTSA-TBD[27]:将加权平方振幅作为区别目标与杂波的主要指标,进行弱小目标的检测.
MKCF-TBD[16]:基于多核相关滤波的检测前跟踪算法,用于海洋环境中的弱小目标跟踪.
表 7 提出算法与其他方法的均方根误差对比
Tab.7
| 目标 | RMSE | ||||||
| MM-PF-TBD | SiamMT | RNN-MOT | MSAR-TBD | WTSA-TBD | MKCF-TBD | 提出算法 | |
| Victor | 4.72 | 8.67 | 7.92 | 5.25 | 4.94 | 3.65 | 1.91 |
| Amelia | 4.91 | 8.05 | 8.03 | 3.26 | 4.39 | 3.94 | 2.17 |
| Urich | 5.09 | 9.51 | 8.56 | 4.52 | 4.97 | 4.05 | 2.52 |
| 平均 | 4.91 | 8.74 | 8.17 | 4.34 | 4.77 | 3.88 | 2.20 |
表8给出7种算法的虚警率PFA、检测概率、跟踪精度、平均交并比、轨迹命中率、轨迹碎片率对比结果. 可以看出,提出算法的检测概率为0.55,跟踪精度为0.97,优于其他方法,且交并比高于其他算法,轨迹碎片数量有所降低,虚警率低于其他方法. 这是由于引入的分数阶傅里叶变换增强了目标与杂波的差异,对杂波的抑制效果显著,能够提升检测概率,降低虚警率与最终的目标轨迹碎片率. 此外,改进的模板自适应更新策略与检测前跟踪结合的算法对目标干扰和运动变化的适应性较强,减少了目标漏跟的情况,因此在目标跟踪精度和轨道命中率上有明显提升.
表 8 提出算法与其他方法的各项指标对比
Tab.8
| 方法 | PFA | PD | PR | MIOU | ROH | NTF |
| MM-PF-TBD | 0.22 | 0.31 | 0.63 | 0.30 | 0.84 | 3.12 |
| SiamMT | 0.31 | 0.24 | 0.47 | 0.28 | 0.72 | 4.56 |
| RNN-MOT | 0.35 | 0.30 | 0.52 | 0.22 | 0.69 | 5.03 |
| MSAR-TBD | 0.18 | 0.29 | 0.62 | 0.27 | 0.93 | 2.00 |
| WTSA-TBD | 0.20 | 0.28 | 0.65 | 0.25 | 0.94 | 2.67 |
| MKCF-TBD | 0.09 | 0.32 | 0.89 | 0.32 | 0.89 | 5.67 |
| 提出算法 | 0.01 | 0.55 | 0.97 | 0.60 | 0.94 | 1.67 |
SiamMT和RNN-MOT分别是基于卷积神经网络和循环神经网络的目标跟踪方法,二者在均方根误差对比和性能对比上表现相对不佳. 这主要是由于虽然深度学习方法在雷达弱小目标跟踪领域已经得到了广泛的应用,但深度学习模型的效果很大程度上依赖于训练数据的覆盖范围和质量. 雷达数据通常包含与距离、速度、角度相关的信息. SiamMT和RNN-MOT侧重于视觉特征,这种差异导致模型在雷达数据上的表现不佳.
MSAR-TBD 和 WTSA-TBD 专注于检测前跟踪的方法,将振幅强度作为区别目标与杂波的指标,无法反映目标的变化特征,在后续的跟踪精度上不如提出算法. MKCF-TBD没有对强杂波进行抑制,且模板提取方法单一,无法适应复杂的跟踪场景,因此各方面的性能比提出算法差.
4. 结 语
提出算法利用FRFT进行降噪处理,使用MKCF模板自适应更新方法,并结合检测前跟踪算法,相较于其他算法,准确性和稳健性更高. 这种综合性的跟踪策略不仅能够提高目标跟踪的精确度,而且能够增强在各种复杂场景中的适应能力,确保更可靠的跟踪结果.
参考文献
Multifractal correlation analysis of autoregressive spectrum-based feature learning for target detection within sea clutter
[J].
Adaptive clutter suppression and detection algorithm for radar maneuvering target with high-order motions via sparse fractional ambiguity function
[J].DOI:10.1109/JSTARS.2020.2981046 [本文引用: 1]
基于小波变换和优化CNN的风电齿轮箱故障诊断
[J].
Fault diagnosis of wind power gearbox based on wavelet transform and improved CNN
[J].
An efficient recursive multiframe track-before-detect algorithm
[J].DOI:10.1109/TAES.2017.2741898 [本文引用: 1]
A bernoulli track-before-detect filter for interacting targets in maritime radar
[J].DOI:10.1109/TAES.2021.3054715 [本文引用: 1]
Joint track-before-detect algorithm for high-maneuvering target indication in video SAR
[J].DOI:10.1109/JSTARS.2021.3104603 [本文引用: 1]
High-speed tracking with kernelized correlation filters
[J].DOI:10.1109/TPAMI.2014.2345390 [本文引用: 1]
Multiple kernelized correlation filters (MKCF) for extended object tracking using X-band marine radar data
[J].DOI:10.1109/TSP.2019.2917812 [本文引用: 1]
Multiple-kernelized-correlation-filter-based track-before-detect algorithm for tracking weak and extended target in marine radar systems
[J].DOI:10.1109/TAES.2022.3150262 [本文引用: 4]
基于FrFT变换和全变分正则化的异常检测算法
[J].
Anomaly detection algorithm based on FrFT transform and total variation regularization
[J].
CA-CFAR performance in K-distributed sea clutter with fully correlated texture
[J].
基于支持向量回归和分位数的雷达K分布海杂波形状参数估计方法
[J].
Shape parameter estimation of radar K-distributed sea clutter based on support vector regression and percentiles
[J].
Multiple model efficient particle filter based track-before-detect for maneuvering weak targets
[J].DOI:10.23919/JSEE.2020.000040 [本文引用: 1]
Track-before-detect for sea clutter rejection: tests with real data
[J].DOI:10.1109/TAES.2016.140851 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}