[1]
LI K, ZHANG J, WANG L, et al A review of the key technologies for sEMG-based human-robot interaction systems
[J]. Biomedical Signal Processing and Control , 2020 , 62 : 102074
DOI:10.1016/j.bspc.2020.102074
[本文引用: 1]
[2]
JIANG S, KANG P, SONG X, et al Emerging wearable interfaces and algorithms for hand gesture recognition: a survey
[J]. IEEE Reviews in Biomedical Engineering , 2021 , 15 : 85 - 102
[本文引用: 2]
[3]
NGUYEN-TRONG K, VU H N, TRUNG N N, et al Gesture recognition using wearable sensors with bi-long short-term memory convolutional neural networks
[J]. IEEE Sensors Journal , 2021 , 21 (13 ): 15065 - 15079
DOI:10.1109/JSEN.2021.3074642
[本文引用: 1]
[4]
JIANG X, XU K, LIU X, et al Neuromuscular password-based user authentication
[J]. IEEE Transactions on Industrial Informatics , 2021 , 17 (4 ): 2641 - 2652
DOI:10.1109/TII.2020.3001612
[本文引用: 1]
[5]
CHEN X, GONG L, ZHENG L, et al. Soft exoskeleton glove for hand assistance based on human-machine interaction and machine learning [C]// 2020 IEEE International Conference on Human-Machine Systems . Rome: IEEE, 2020: 1−6.
[本文引用: 1]
[6]
Al-FAHAAM H, DAVIS S, NEFTI-MEZIANI S, et al Novel soft bending actuator-based power augmentation hand exoskeleton controlled by human intention
[J]. Intelligent Service Robotics , 2018 , 11 (3 ): 247 - 268
DOI:10.1007/s11370-018-0250-4
[本文引用: 1]
[7]
PHINYOMARK A, KHUSHABA R N, SCHEME E Feature extraction and selection for myoelectric control based on wearable EMG sensors
[J]. Sensors , 2018 , 18 (5 ): 1615
DOI:10.3390/s18051615
[本文引用: 2]
[8]
CLANCT E A, MORIN E L, MERLETTI R Sampling, noise-reduction and amplitude estimation issues in surface electromyography
[J]. Journal of Electromyography and Kinesiology , 2002 , 12 (1 ): 1 - 16
DOI:10.1016/S1050-6411(01)00033-5
[本文引用: 1]
[9]
IVES J C, WIGGLESWORTH J K Sampling rate effects on surface EMG timing and amplitude measures
[J]. Clinical Biomechanics , 2003 , 18 (6 ): 543 - 552
DOI:10.1016/S0268-0033(03)00089-5
[本文引用: 1]
[10]
LI G, LI Y, YU L, et al Conditioning and sampling issues of EMG signals in motion recognition of multifunctional myoelectric prostheses
[J]. Annals of Biomedical Engineering , 2011 , 39 (6 ): 1779 - 1787
DOI:10.1007/s10439-011-0265-x
[本文引用: 1]
[11]
PHINYOMARK A, SCHEME E. A feature extraction issue for myoelectric control based on wearable EMG sensors [C]// 2018 IEEE Sensors Applications Symposium . Seoul: IEEE, 2018: 1−6.
[本文引用: 1]
[12]
CHEN H, ZHANG Y, LI G, et al Surface electromyography feature extraction via convolutional neural network
[J]. International Journal of Machine Learning and Cybernetics , 2020 , 11 : 185 - 196
DOI:10.1007/s13042-019-00966-x
[本文引用: 1]
[13]
ATZORI M, GIJSBERTS A, HEYNEN S, et al. Building the Ninapro database: a resource for the biorobotics community [C]// 2012 4th IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics . Rome: IEEE, 2012: 1258−1265.
[本文引用: 2]
[14]
CAO L, ZHANG W, KAN X, et al A novel adaptive mutation PSO optimized SVM algorithm for sEMG-based gesture recognition
[J]. Scientific Programming , 2021 , 2021 (1 ): 9988823
[15]
WAHID M F, TAFRESHI R, AL-SOWAIDI M, et al Subject-independent hand gesture recognition using normalization and machine learning algorithms
[J]. Journal of Computational Science , 2018 , 27 : 69 - 76
DOI:10.1016/j.jocs.2018.04.019
[16]
TEPE C, ERDIM M Classification of surface electromyography and gyroscopic signals of finger gestures acquired by Myo armband using machine learning methods
[J]. Biomedical Signal Processing and Control , 2022 , 75 : 103588
DOI:10.1016/j.bspc.2022.103588
[17]
JARAMILLO-YANEZ A, UNAPANTA L, BENALCÁZAR M E. Short-term hand gesture recognition using electromyography in the transient state, support vector machines, and discrete wavelet transform [C]// 2019 IEEE Latin American Conference on Computational Intelligence . Guayaquil: IEEE, 2019: 1−6.
[18]
WAHID M F, TAFRESHI R, AL-SOWAIDI M, et al. An efficient approach to recognize hand gestures using machine-learning algorithms [C]// 2018 IEEE 4th Middle East Conference on Biomedical Engineering . Tunis: IEEE, 2018: 171−176.
[本文引用: 1]
[19]
ZHANG Z, GEIGER J, POHJALAINEN J, et al Deep learning for environmentally robust speech recognition: an overview of recent developments
[J]. ACM Transactions on Intelligent Systems and Technology , 2018 , 9 (5 ): 49
[本文引用: 2]
[21]
KHAN A, SOHAIL A, ZAHOORA U, et al A survey of the recent architectures of deep convolutional neural networks
[J]. Artificial Intelligence Review , 2020 , 53 (8 ): 5455 - 5516
DOI:10.1007/s10462-020-09825-6
[本文引用: 1]
[22]
CHAIYAROJ A, SRI-IESARANUSORN P, BUEKBAN C, et al. Deep neural network approach for hand, wrist, grasping and functional movements classification using low-cost sEMG sensors [C]// 2019 IEEE International Conference on Bioinformatics and Biomedicine . San Diego: IEEE, 2019: 1443−1448.
[本文引用: 2]
[23]
TSINGANOS P, CORNELIS B, CORNELIS J, et al. Improved gesture recognition based on sEMG signals and TCN [C]// 2019 IEEE International Conference on Acoustics, Speech and Signal Processing . Brighton: IEEE, 2019: 1169−1173.
[24]
SHEN S, GU K, CHEN X, et al Gesture recognition through sEMG with wearable device based on deep learning
[J]. Mobile Networks and Applications , 2020 , 25 : 2447 - 2458
DOI:10.1007/s11036-020-01590-8
[本文引用: 2]
[25]
陈思佳, 罗志增 基于长短时记忆和卷积神经网络的手势肌电识别研究
[J]. 仪器仪表学报 , 2021 , 42 (2 ): 162 - 170
[本文引用: 2]
CHEN Sijia, LUO Zhizeng Research on gesture EMG recognition based on long short-term memory and convolutional neural network
[J]. Chinese Journal of Scientific Instrument , 2021 , 42 (2 ): 162 - 170
[本文引用: 2]
[26]
LI Y, YANG L, HE Z, et al Low-cost data glove based on deep-learning-enhanced flexible multiwalled carbon nanotube sensors for real-time gesture recognition
[J]. Advanced Intelligent Systems , 2022 , 4 (11 ): 2200128
DOI:10.1002/aisy.202200128
[本文引用: 1]
[27]
LI Y, ZHANG W, ZHANG Q, et al Transfer learning-based muscle activity decoding scheme by low-frequency sEMG for wearable low-cost application
[J]. IEEE Access , 2021 , 9 : 22804 - 22815
DOI:10.1109/ACCESS.2021.3056412
[本文引用: 4]
[28]
HE Y, FUKUDA O, BU N, et al. Surface EMG pattern recognition using long short-term memory combined with multilayer perceptron [C]// 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society . Honolulu: IEEE, 2018: 5636−5639.
[本文引用: 2]
[29]
TSINGANOS P, CORNELIS B, CORNELIS B, et al. Deep learning in EMG-based gesture recognition [C]// International Conference on Physiological Computing Systems . Seville: [s. n.], 2018: 107−114.
[本文引用: 3]
[31]
FARINA D, JIANG N, REHBAUM H, et al The extraction of neural information from the surface EMG for the control of upper-limb prostheses: emerging avenues and challenges
[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering , 2014 , 22 (4 ): 797 - 809
DOI:10.1109/TNSRE.2014.2305111
[本文引用: 1]
[32]
SIMÃO M, MENDES N, GIBARU O, et al A review on electromyography decoding and pattern recognition for human-machine interaction
[J]. IEEE Access , 2019 , 7 : 39564 - 39582
DOI:10.1109/ACCESS.2019.2906584
[本文引用: 1]
[33]
XU H, XIONG A Advances and disturbances in sEMG-based intentions and movements recognition: a review
[J]. IEEE Sensors Journal , 2021 , 21 (12 ): 13019 - 13028
DOI:10.1109/JSEN.2021.3068521
[34]
XIONG D, ZHANG D, ZHAO X, et al Deep learning for EMG-based human-machine interaction: a review
[J]. IEEE/CAA Journal of Automatica Sinica , 2021 , 8 (3 ): 512 - 533
DOI:10.1109/JAS.2021.1003865
[本文引用: 1]
[35]
KETYKÓ I, KOVÁCS F, VARGA K Z. Domain adaptation for sEMG-based gesture recognition with recurrent neural networks [C]// 2019 International Joint Conference on Neural Networks . Budapest: IEEE, 2019: 1−7.
[本文引用: 1]
[36]
SOSIN I, KUDENKO D, SHPILMAN A. Continuous gesture recognition from sEMG sensor data with recurrent neural networks and adversarial domain adaptation [C]// 2018 15th International Conference on Control, Automation, Robotics and Vision . Singapore: IEEE, 2018: 1436−1441.
[本文引用: 1]
[37]
ATZORI M, GIJSBERTS A, CASTELLINI C, et al Electromyography data for non-invasive naturally-controlled robotic hand prostheses
[J]. Scientific Data , 2014 , 1 : 140053
DOI:10.1038/sdata.2014.53
[本文引用: 2]
[38]
GENG W, DU Y, JIN W, et al Gesture recognition by instantaneous surface EMG images
[J]. Scientific Reports , 2016 , 6 : 36571
DOI:10.1038/srep36571
[本文引用: 2]
[39]
HUDGINS B, PARKER P, SCOTT R N A new strategy for multifunction myoelectric control
[J]. IEEE Transactions on Biomedical Engineering , 1993 , 40 (1 ): 82 - 94
DOI:10.1109/10.204774
[本文引用: 1]
[40]
HU J, SHEN L, SUN G. Squeeze-and-excitation networks [C]// 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 7132−7141.
[本文引用: 1]
[41]
ATREY P K, HOSSAIN M A, EI SADDIK A, et al Multimodal fusion for multimedia analysis: a survey
[J]. Multimedia Systems , 2010 , 16 : 345 - 379
DOI:10.1007/s00530-010-0182-0
[本文引用: 1]
[42]
ZHU Y, ZHUANG F, WANG J, et al Deep subdomain adaptation network for image classification
[J]. IEEE Transactions on Neural Networks and Learning Systems , 2021 , 32 (4 ): 1713 - 1722
DOI:10.1109/TNNLS.2020.2988928
[本文引用: 2]
[43]
DU Y, WONG Y, JIN W, et. al. Semi-supervised learning for surface EMG-based gesture recognition [C]// Proceedings of the 26th International Joint Conference on Artificial Intelligence . Melbourne: AAAI Press, 2017: 1624–1630.
[本文引用: 2]
[44]
XU Z, YU J, XIANG W, et al A novel SE-CNN attention architecture for sEMG-based hand gesture recognition
[J]. Computer Modeling in Engineering and Sciences , 2023 , 134 (1 ): 157 - 177
DOI:10.32604/cmes.2022.020035
[本文引用: 1]
[45]
JOSEPHS D, DRAKE C, HEROY A, et al sEMG gesture recognition with a simple model of attention
[J]. Machine Learning for Health , 2020 , 136 : 126 - 138
[本文引用: 1]
[46]
PENG F, CHEN C, LV D, et al Gesture recognition by ensemble extreme learning machine based on surface electromyography signals
[J]. Frontiers in Human Neuroscience , 2022 , 16 : 1 - 14
[本文引用: 5]
[47]
SMITH L H, HARGROVE L J, LOCK B A, et al Determining the optimal window length for pattern recognition-based myoelectric control: balancing the competing effects of classification error and controller delay
[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering , 2011 , 19 (2 ): 186 - 192
DOI:10.1109/TNSRE.2010.2100828
[本文引用: 1]
A review of the key technologies for sEMG-based human-robot interaction systems
1
2020
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Emerging wearable interfaces and algorithms for hand gesture recognition: a survey
2
2021
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
Gesture recognition using wearable sensors with bi-long short-term memory convolutional neural networks
1
2021
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Neuromuscular password-based user authentication
1
2021
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
1
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Novel soft bending actuator-based power augmentation hand exoskeleton controlled by human intention
1
2018
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Feature extraction and selection for myoelectric control based on wearable EMG sensors
2
2018
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
... [7 ,10 ]. sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Sampling, noise-reduction and amplitude estimation issues in surface electromyography
1
2002
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Sampling rate effects on surface EMG timing and amplitude measures
1
2003
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Conditioning and sampling issues of EMG signals in motion recognition of multifunctional myoelectric prostheses
1
2011
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
1
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
Surface electromyography feature extraction via convolutional neural network
1
2020
... 表面肌电(surface electromyography, sEMG)信号作为与人类运动密切相关的生理信号,可以反映肌肉活动的兴奋程度,是人机交互系统中的重要控制信号[1 ] . 可穿戴的手势界面有望恢复和辅助手部功能,增强人机交流,在康复、假肢控制和手语识别上展现出巨大的潜力[2 ] ,也被应用于其他人机交互领域,例如家用电器的控制[3 ] 、用户认证[4 ] 和手部外骨骼[5 -6 ] 等. 与临床实践中广泛使用的肌电采集设备相比,可穿戴传感器的sEMG信号采样率更低(Myo臂章的采样频率为200 Hz)[7 ] . sEMG信号的主要功率为400~500 Hz[8 ] ,由奈奎斯特采样理论可知,使用1 000 Hz的采样率足以捕捉sEMG信号的重要特性[9 ] . 在采样率低于1 000 Hz的手势识别中,手势识别的分类性能随着采样率的降低而降低[7 ,10 ] . sEMG具有很强的非线性特性,对sEMG信号进行分类常要在特定时间窗口中提取有效特征,再将肌电特征序列输入分类器中进行. 有研究者使用传统机器学习方法进行低采样率sEMG手势识别研究. Phinyomark等[11 ] 使用支持向量机(support vector machine, SVM)和线性判别分析(linear discriminant analysis, LDA)研究不同特征对低采样率sEMG手势识别的影响. 该研究结果表明,波长的分类效果优于其他特征. Chen等[12 ] 使用SVM、LDA和K近邻(K-nearest neighbor, KNN)分类器,研究由卷积神经网络提取的特征(convolutional neural network feature, CNNFeat)与25个传统特征在低采样率sEMG手势识别中的不同表现,实验结果表明,在跨被试的手势识别测试中,CNNFeat优于传统特征. ...
2
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
... [13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
A novel adaptive mutation PSO optimized SVM algorithm for sEMG-based gesture recognition
0
2021
Subject-independent hand gesture recognition using normalization and machine learning algorithms
0
2018
Classification of surface electromyography and gyroscopic signals of finger gestures acquired by Myo armband using machine learning methods
0
2022
1
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
Deep learning for environmentally robust speech recognition: an overview of recent developments
2
2018
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
... DB1中的肌电数据介于0~1.0,因此只对DB5中的肌电数据进行归一化处理:用滑动窗口将肌电数据划分为一系列的分析窗口,对每个分析窗口内的数据进行归一化,归一化的具体方式见文献[19 ]. ...
Convolutional neural networks for hyperspectral image classification
1
2017
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
A survey of the recent architectures of deep convolutional neural networks
1
2020
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
2
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
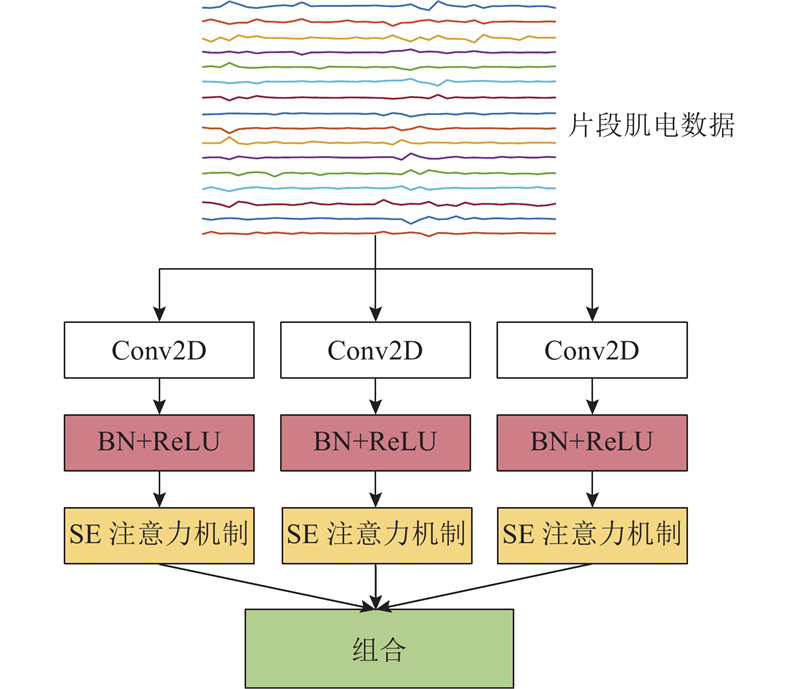
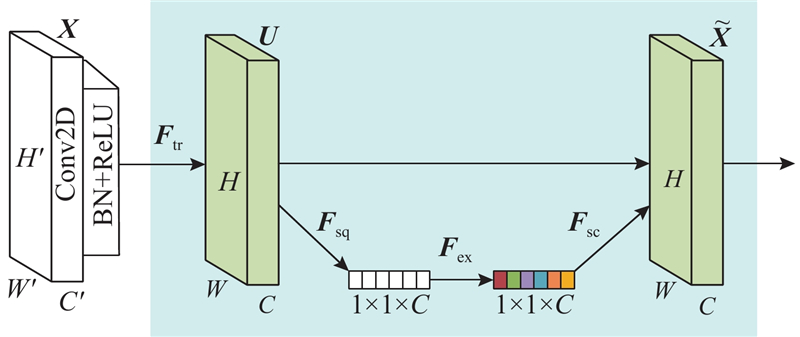
... 相比高采样率sEMG信号,低采样率sEMG信号包含的运动信息更少,Chaiyaroj等[22 ,27 ] 在提取不同的肌电特征后,以特征组合的方式丰富肌电特征的信息,将特征组合后的肌电特征集送入网络. 陈思佳等[25 ] 通过提取原始sEMG信号的小波包特征图像并通过与原始sEMG信号结合的方式来扩展低采样率sEMG信号的信息,将sEMG信号的小波包特征图像与原始sEMG信号结合作为深度学习模型的输入数据. 为了扩展低采样率sEMG信号的信息并防止在卷积过程中信息的损失,受特征级融合概念[41 ] 的启发,信息扩展层从原始sEMG信号中提取不同的分支输出,通过组合不同的分支输出来扩展低采样率sEMG信号的信息. 信息扩展层的结构如图2 所示,信息扩展层中左中右侧侧卷积层的具体参数如表3 所示. SE注意力机制通过明确模拟卷积特征通道之间的相互依存关系来提高网络的表征能力,它可以学习使用全局信息来选择性地强调信息特征并抑制无用的特征. 本研究通过在信息扩展层中加入SE注意力机制来增强关键特征的表示,SE注意力机制的结构如图3 所示. 当要对数据进行处理时,转换函数$ {{{\boldsymbol{F}}}}_{\mathrm{t}\mathrm{r}} $ X $ \boldsymbol{U}=\left[{\boldsymbol{u}}_{1},{\boldsymbol{u}}_{2},\cdots {\boldsymbol{u}}_{C}\right] $
Gesture recognition through sEMG with wearable device based on deep learning
2
2020
... 对于DB1子数据库,参考文献[37 ]、[38 ],使用具有截止频率为1.0 Hz的一阶低通滤波器进行数据去噪. 对于DB5子数据库,参考文献[24 ],不进行数据去噪. ...
... Performance comparison with different gesture recognition methods
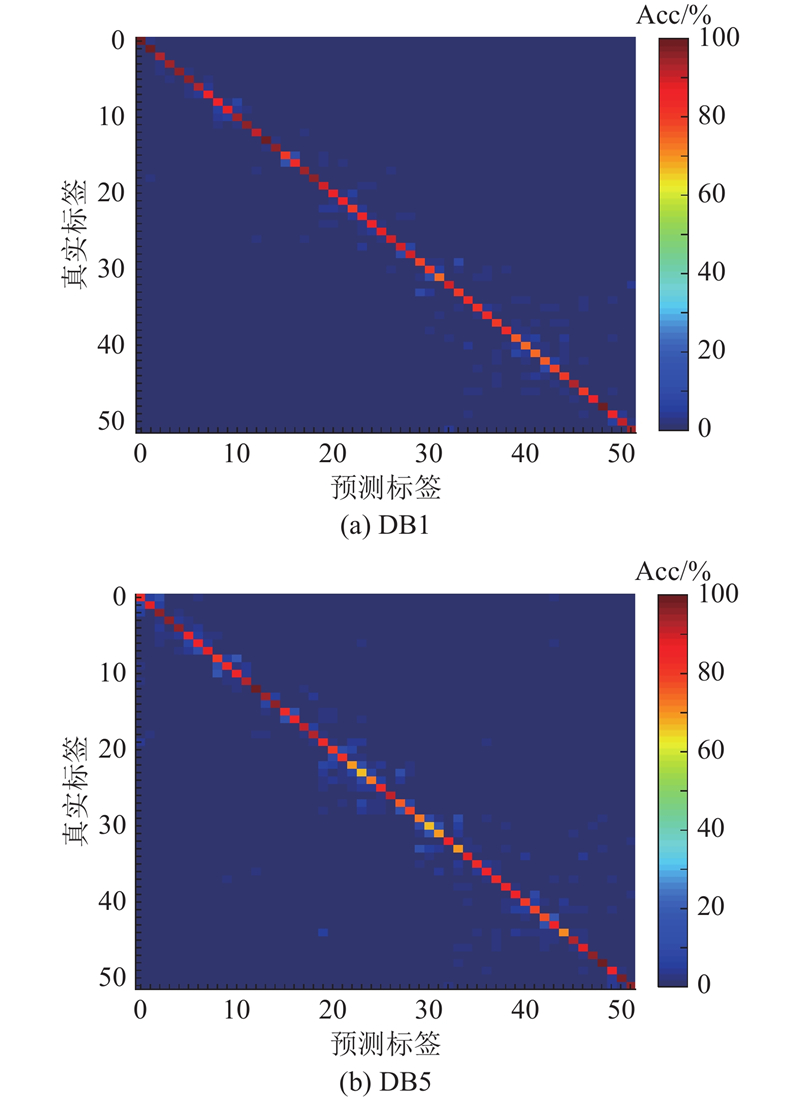
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
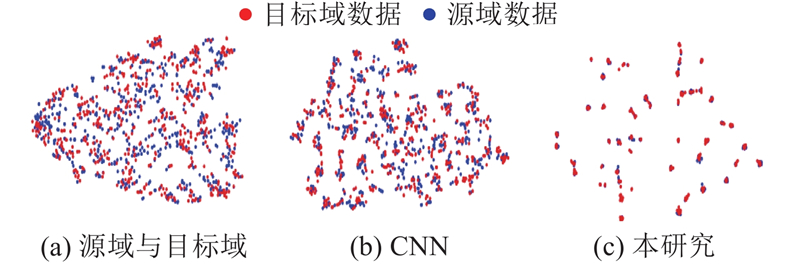
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
基于长短时记忆和卷积神经网络的手势肌电识别研究
2
2021
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
... 相比高采样率sEMG信号,低采样率sEMG信号包含的运动信息更少,Chaiyaroj等[22 ,27 ] 在提取不同的肌电特征后,以特征组合的方式丰富肌电特征的信息,将特征组合后的肌电特征集送入网络. 陈思佳等[25 ] 通过提取原始sEMG信号的小波包特征图像并通过与原始sEMG信号结合的方式来扩展低采样率sEMG信号的信息,将sEMG信号的小波包特征图像与原始sEMG信号结合作为深度学习模型的输入数据. 为了扩展低采样率sEMG信号的信息并防止在卷积过程中信息的损失,受特征级融合概念[41 ] 的启发,信息扩展层从原始sEMG信号中提取不同的分支输出,通过组合不同的分支输出来扩展低采样率sEMG信号的信息. 信息扩展层的结构如图2 所示,信息扩展层中左中右侧侧卷积层的具体参数如表3 所示. SE注意力机制通过明确模拟卷积特征通道之间的相互依存关系来提高网络的表征能力,它可以学习使用全局信息来选择性地强调信息特征并抑制无用的特征. 本研究通过在信息扩展层中加入SE注意力机制来增强关键特征的表示,SE注意力机制的结构如图3 所示. 当要对数据进行处理时,转换函数$ {{{\boldsymbol{F}}}}_{\mathrm{t}\mathrm{r}} $ X $ \boldsymbol{U}=\left[{\boldsymbol{u}}_{1},{\boldsymbol{u}}_{2},\cdots {\boldsymbol{u}}_{C}\right] $
基于长短时记忆和卷积神经网络的手势肌电识别研究
2
2021
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
... 相比高采样率sEMG信号,低采样率sEMG信号包含的运动信息更少,Chaiyaroj等[22 ,27 ] 在提取不同的肌电特征后,以特征组合的方式丰富肌电特征的信息,将特征组合后的肌电特征集送入网络. 陈思佳等[25 ] 通过提取原始sEMG信号的小波包特征图像并通过与原始sEMG信号结合的方式来扩展低采样率sEMG信号的信息,将sEMG信号的小波包特征图像与原始sEMG信号结合作为深度学习模型的输入数据. 为了扩展低采样率sEMG信号的信息并防止在卷积过程中信息的损失,受特征级融合概念[41 ] 的启发,信息扩展层从原始sEMG信号中提取不同的分支输出,通过组合不同的分支输出来扩展低采样率sEMG信号的信息. 信息扩展层的结构如图2 所示,信息扩展层中左中右侧侧卷积层的具体参数如表3 所示. SE注意力机制通过明确模拟卷积特征通道之间的相互依存关系来提高网络的表征能力,它可以学习使用全局信息来选择性地强调信息特征并抑制无用的特征. 本研究通过在信息扩展层中加入SE注意力机制来增强关键特征的表示,SE注意力机制的结构如图3 所示. 当要对数据进行处理时,转换函数$ {{{\boldsymbol{F}}}}_{\mathrm{t}\mathrm{r}} $ X $ \boldsymbol{U}=\left[{\boldsymbol{u}}_{1},{\boldsymbol{u}}_{2},\cdots {\boldsymbol{u}}_{C}\right] $
Low-cost data glove based on deep-learning-enhanced flexible multiwalled carbon nanotube sensors for real-time gesture recognition
1
2022
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
Transfer learning-based muscle activity decoding scheme by low-frequency sEMG for wearable low-cost application
4
2021
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
... 相比高采样率sEMG信号,低采样率sEMG信号包含的运动信息更少,Chaiyaroj等[22 ,27 ] 在提取不同的肌电特征后,以特征组合的方式丰富肌电特征的信息,将特征组合后的肌电特征集送入网络. 陈思佳等[25 ] 通过提取原始sEMG信号的小波包特征图像并通过与原始sEMG信号结合的方式来扩展低采样率sEMG信号的信息,将sEMG信号的小波包特征图像与原始sEMG信号结合作为深度学习模型的输入数据. 为了扩展低采样率sEMG信号的信息并防止在卷积过程中信息的损失,受特征级融合概念[41 ] 的启发,信息扩展层从原始sEMG信号中提取不同的分支输出,通过组合不同的分支输出来扩展低采样率sEMG信号的信息. 信息扩展层的结构如图2 所示,信息扩展层中左中右侧侧卷积层的具体参数如表3 所示. SE注意力机制通过明确模拟卷积特征通道之间的相互依存关系来提高网络的表征能力,它可以学习使用全局信息来选择性地强调信息特征并抑制无用的特征. 本研究通过在信息扩展层中加入SE注意力机制来增强关键特征的表示,SE注意力机制的结构如图3 所示. 当要对数据进行处理时,转换函数$ {{{\boldsymbol{F}}}}_{\mathrm{t}\mathrm{r}} $ X $ \boldsymbol{U}=\left[{\boldsymbol{u}}_{1},{\boldsymbol{u}}_{2},\cdots {\boldsymbol{u}}_{C}\right] $
... 采用与NinaPro数据库现有研究中常用的被试内方案:在被试内评估中,所提模型使用某受试者的部分数据进行训练,并使用该受试者的剩余数据进行测试. 对于DB1子数据库,1、3、4、6、8、9和10组重复用于训练,2、5和7组重复用于测试[29 ,37 ,43 ] . 对于DB5子数据库,1、3、4和6组重复用于训练,2和5组重复用于测试[27 ] . 通过对所有受试者取得的识别准确率进行平均获得最终的手势识别准确率,计算式为 ...
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
2
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
3
... 虽然传统的机器学习方法在低采样率sEMG手势识别上有较高的分类精度[13 -18 ] ,但是特征提取、选择及组合的过程复杂,且所选的不同特征会导致性能差异[2 ] . 深度学习方法是解决上述问题的方案之一,其中卷积神经网络(convolutional neural networks, CNN)在语音识别[19 ] 、图像分类[20 ] 、计算机视觉、自然语言处理和目标检测[21 ] 等领域均表现出良好性能. 深度学习方法在低采样率sEMG手势识别上的应用也取得了令人满意的效果[22 -25 ] . Li等[26 ] 构建了CNN结合长短时记忆的低采样率sEMG手势识别模型,使用自采集的数据进行模型评估, 30种手势动作的平均准确率为97.5%. Li等[27 ] 提出基于AlexNet的迁移学习模型,利用NinaPro[13 ] 中DB5子数据库的sEMG信号训练模型,模型对10名受试者的53种手势识别精度达到70.4%. He等[28 ] 提出长短时记忆神经网络结合多层感知的手势识别模型,使用NinaPro数据库进行模型评估,模型对52种手势的识别精度为75.45%. Tsinganos等[29 ] 使用基于CNN的改进模型识别NinaPro DB1数据库中的53种手势动作,识别准确率为72.06%. ...
... 采用与NinaPro数据库现有研究中常用的被试内方案:在被试内评估中,所提模型使用某受试者的部分数据进行训练,并使用该受试者的剩余数据进行测试. 对于DB1子数据库,1、3、4、6、8、9和10组重复用于训练,2、5和7组重复用于测试[29 ,37 ,43 ] . 对于DB5子数据库,1、3、4和6组重复用于训练,2和5组重复用于测试[27 ] . 通过对所有受试者取得的识别准确率进行平均获得最终的手势识别准确率,计算式为 ...
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
Surface EMG in advanced hand prosthetics
1
2009
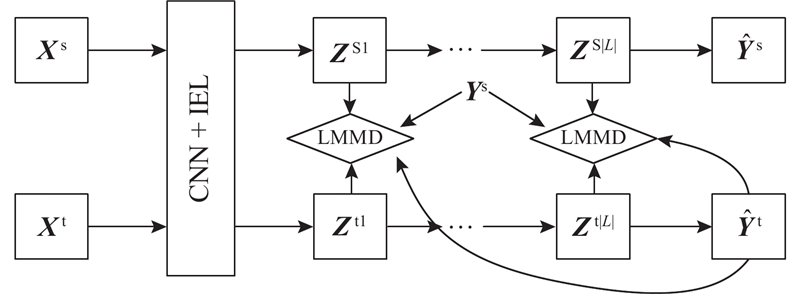
... 在sEMG手势识别中,由于电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素的影响[30 ] ,导致sEMG信号特性会随时间变化,使肌电控制算法的性能受到影响[31 ] . 在sEMG模式识别方面,预测和纠正上述干扰源能够提升模型的识别性能[32 -34 ] . Ketykó等[35 -36 ] 使用基于深度学习的域自适应方法预测和纠正上述干扰源,该方法在会话内、会话间以及受试者间的实验中均表现出良好性能,可以提升受试者的迁移能力并提高分类精度. 为了预测和纠正上述干扰源并提升模型识别低采样率肌电手势的性能,本研究提出卷积神经网络结合子域适应的方法. 由于低采样率sEMG包含的运动信息比高采样率sEMG的更少,为了避免卷积过程中的信息损失,在CNN中构建信息扩展层(information expansion layer, IEL),在丰富低采样率sEMG信息的同时确保信息有意义. 引入子域适应网络(subdomain adaptation network, SAN)促使CNN更好地提取源域与目标域中的域不变表示,提升构成模型的低采样率肌电手势识别性能. ...
The extraction of neural information from the surface EMG for the control of upper-limb prostheses: emerging avenues and challenges
1
2014
... 在sEMG手势识别中,由于电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素的影响[30 ] ,导致sEMG信号特性会随时间变化,使肌电控制算法的性能受到影响[31 ] . 在sEMG模式识别方面,预测和纠正上述干扰源能够提升模型的识别性能[32 -34 ] . Ketykó等[35 -36 ] 使用基于深度学习的域自适应方法预测和纠正上述干扰源,该方法在会话内、会话间以及受试者间的实验中均表现出良好性能,可以提升受试者的迁移能力并提高分类精度. 为了预测和纠正上述干扰源并提升模型识别低采样率肌电手势的性能,本研究提出卷积神经网络结合子域适应的方法. 由于低采样率sEMG包含的运动信息比高采样率sEMG的更少,为了避免卷积过程中的信息损失,在CNN中构建信息扩展层(information expansion layer, IEL),在丰富低采样率sEMG信息的同时确保信息有意义. 引入子域适应网络(subdomain adaptation network, SAN)促使CNN更好地提取源域与目标域中的域不变表示,提升构成模型的低采样率肌电手势识别性能. ...
A review on electromyography decoding and pattern recognition for human-machine interaction
1
2019
... 在sEMG手势识别中,由于电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素的影响[30 ] ,导致sEMG信号特性会随时间变化,使肌电控制算法的性能受到影响[31 ] . 在sEMG模式识别方面,预测和纠正上述干扰源能够提升模型的识别性能[32 -34 ] . Ketykó等[35 -36 ] 使用基于深度学习的域自适应方法预测和纠正上述干扰源,该方法在会话内、会话间以及受试者间的实验中均表现出良好性能,可以提升受试者的迁移能力并提高分类精度. 为了预测和纠正上述干扰源并提升模型识别低采样率肌电手势的性能,本研究提出卷积神经网络结合子域适应的方法. 由于低采样率sEMG包含的运动信息比高采样率sEMG的更少,为了避免卷积过程中的信息损失,在CNN中构建信息扩展层(information expansion layer, IEL),在丰富低采样率sEMG信息的同时确保信息有意义. 引入子域适应网络(subdomain adaptation network, SAN)促使CNN更好地提取源域与目标域中的域不变表示,提升构成模型的低采样率肌电手势识别性能. ...
Advances and disturbances in sEMG-based intentions and movements recognition: a review
0
2021
Deep learning for EMG-based human-machine interaction: a review
1
2021
... 在sEMG手势识别中,由于电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素的影响[30 ] ,导致sEMG信号特性会随时间变化,使肌电控制算法的性能受到影响[31 ] . 在sEMG模式识别方面,预测和纠正上述干扰源能够提升模型的识别性能[32 -34 ] . Ketykó等[35 -36 ] 使用基于深度学习的域自适应方法预测和纠正上述干扰源,该方法在会话内、会话间以及受试者间的实验中均表现出良好性能,可以提升受试者的迁移能力并提高分类精度. 为了预测和纠正上述干扰源并提升模型识别低采样率肌电手势的性能,本研究提出卷积神经网络结合子域适应的方法. 由于低采样率sEMG包含的运动信息比高采样率sEMG的更少,为了避免卷积过程中的信息损失,在CNN中构建信息扩展层(information expansion layer, IEL),在丰富低采样率sEMG信息的同时确保信息有意义. 引入子域适应网络(subdomain adaptation network, SAN)促使CNN更好地提取源域与目标域中的域不变表示,提升构成模型的低采样率肌电手势识别性能. ...
1
... 在sEMG手势识别中,由于电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素的影响[30 ] ,导致sEMG信号特性会随时间变化,使肌电控制算法的性能受到影响[31 ] . 在sEMG模式识别方面,预测和纠正上述干扰源能够提升模型的识别性能[32 -34 ] . Ketykó等[35 -36 ] 使用基于深度学习的域自适应方法预测和纠正上述干扰源,该方法在会话内、会话间以及受试者间的实验中均表现出良好性能,可以提升受试者的迁移能力并提高分类精度. 为了预测和纠正上述干扰源并提升模型识别低采样率肌电手势的性能,本研究提出卷积神经网络结合子域适应的方法. 由于低采样率sEMG包含的运动信息比高采样率sEMG的更少,为了避免卷积过程中的信息损失,在CNN中构建信息扩展层(information expansion layer, IEL),在丰富低采样率sEMG信息的同时确保信息有意义. 引入子域适应网络(subdomain adaptation network, SAN)促使CNN更好地提取源域与目标域中的域不变表示,提升构成模型的低采样率肌电手势识别性能. ...
1
... 在sEMG手势识别中,由于电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素的影响[30 ] ,导致sEMG信号特性会随时间变化,使肌电控制算法的性能受到影响[31 ] . 在sEMG模式识别方面,预测和纠正上述干扰源能够提升模型的识别性能[32 -34 ] . Ketykó等[35 -36 ] 使用基于深度学习的域自适应方法预测和纠正上述干扰源,该方法在会话内、会话间以及受试者间的实验中均表现出良好性能,可以提升受试者的迁移能力并提高分类精度. 为了预测和纠正上述干扰源并提升模型识别低采样率肌电手势的性能,本研究提出卷积神经网络结合子域适应的方法. 由于低采样率sEMG包含的运动信息比高采样率sEMG的更少,为了避免卷积过程中的信息损失,在CNN中构建信息扩展层(information expansion layer, IEL),在丰富低采样率sEMG信息的同时确保信息有意义. 引入子域适应网络(subdomain adaptation network, SAN)促使CNN更好地提取源域与目标域中的域不变表示,提升构成模型的低采样率肌电手势识别性能. ...
Electromyography data for non-invasive naturally-controlled robotic hand prostheses
2
2014
... 对于DB1子数据库,参考文献[37 ]、[38 ],使用具有截止频率为1.0 Hz的一阶低通滤波器进行数据去噪. 对于DB5子数据库,参考文献[24 ],不进行数据去噪. ...
... 采用与NinaPro数据库现有研究中常用的被试内方案:在被试内评估中,所提模型使用某受试者的部分数据进行训练,并使用该受试者的剩余数据进行测试. 对于DB1子数据库,1、3、4、6、8、9和10组重复用于训练,2、5和7组重复用于测试[29 ,37 ,43 ] . 对于DB5子数据库,1、3、4和6组重复用于训练,2和5组重复用于测试[27 ] . 通过对所有受试者取得的识别准确率进行平均获得最终的手势识别准确率,计算式为 ...
Gesture recognition by instantaneous surface EMG images
2
2016
... 对于DB1子数据库,参考文献[37 ]、[38 ],使用具有截止频率为1.0 Hz的一阶低通滤波器进行数据去噪. 对于DB5子数据库,参考文献[24 ],不进行数据去噪. ...
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
A new strategy for multifunction myoelectric control
1
1993
... 为了满足肌电控制系统的实时性要求,须使用滑动窗口将EMG信号划分为一系列的分析窗口,滑动窗口大小应小于300 ms[39 ] ,为此将滑动窗口大小设置为200 ms(重叠100 ms). ...
1
... 如图1 所示,本研究提出的低采样率sEMG手势识别模型分为3个阶段:数据输入阶段、信息扩展阶段、模型预测阶段. 在信息扩展阶段,信息扩展层有3个分支,每个分支包含卷积层、批量归一化(batch normalization,BN)、ReLU激活层和挤压与激励(squeeze-and-excitation,SE)注意力机制[40 ] 模块. 原始肌电数据经过信息扩展层后得到3种数据格式为$ H\times W\times F $ $ H $ $ W $ $ F $ 表2 所示. 表中,$ F $ $ {K}_{\mathrm{s}} $ $ S $ $ P $ $ {A}_{\mathrm{f}} $ $ D $
Multimodal fusion for multimedia analysis: a survey
1
2010
... 相比高采样率sEMG信号,低采样率sEMG信号包含的运动信息更少,Chaiyaroj等[22 ,27 ] 在提取不同的肌电特征后,以特征组合的方式丰富肌电特征的信息,将特征组合后的肌电特征集送入网络. 陈思佳等[25 ] 通过提取原始sEMG信号的小波包特征图像并通过与原始sEMG信号结合的方式来扩展低采样率sEMG信号的信息,将sEMG信号的小波包特征图像与原始sEMG信号结合作为深度学习模型的输入数据. 为了扩展低采样率sEMG信号的信息并防止在卷积过程中信息的损失,受特征级融合概念[41 ] 的启发,信息扩展层从原始sEMG信号中提取不同的分支输出,通过组合不同的分支输出来扩展低采样率sEMG信号的信息. 信息扩展层的结构如图2 所示,信息扩展层中左中右侧侧卷积层的具体参数如表3 所示. SE注意力机制通过明确模拟卷积特征通道之间的相互依存关系来提高网络的表征能力,它可以学习使用全局信息来选择性地强调信息特征并抑制无用的特征. 本研究通过在信息扩展层中加入SE注意力机制来增强关键特征的表示,SE注意力机制的结构如图3 所示. 当要对数据进行处理时,转换函数$ {{{\boldsymbol{F}}}}_{\mathrm{t}\mathrm{r}} $ X $ \boldsymbol{U}=\left[{\boldsymbol{u}}_{1},{\boldsymbol{u}}_{2},\cdots {\boldsymbol{u}}_{C}\right] $
Deep subdomain adaptation network for image classification
2
2021
... 在不考虑2个域中的子域关系的情况下对齐源域和目标域的分布,这可能会丢失每个类别的细粒度信息. Zhu等[42 ] 考虑2个域中的子域关系,提出子域适应方法,该方法可以捕获每个类别的细粒度信息,更好地对齐源域与目标域的分布. 在子域适应方法中,迁移网络的学习通过基于局部最大均值差异(local maximum mean discrepancy, LMMD)在不同域之间对齐相关子域分布实现,LMMD的定义式为 ...
... $ P $ $\gamma $ [42 ] . ...
2
... 采用与NinaPro数据库现有研究中常用的被试内方案:在被试内评估中,所提模型使用某受试者的部分数据进行训练,并使用该受试者的剩余数据进行测试. 对于DB1子数据库,1、3、4、6、8、9和10组重复用于训练,2、5和7组重复用于测试[29 ,37 ,43 ] . 对于DB5子数据库,1、3、4和6组重复用于训练,2和5组重复用于测试[27 ] . 通过对所有受试者取得的识别准确率进行平均获得最终的手势识别准确率,计算式为 ...
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
A novel SE-CNN attention architecture for sEMG-based hand gesture recognition
1
2023
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
sEMG gesture recognition with a simple model of attention
1
2020
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
Gesture recognition by ensemble extreme learning machine based on surface electromyography signals
5
2022
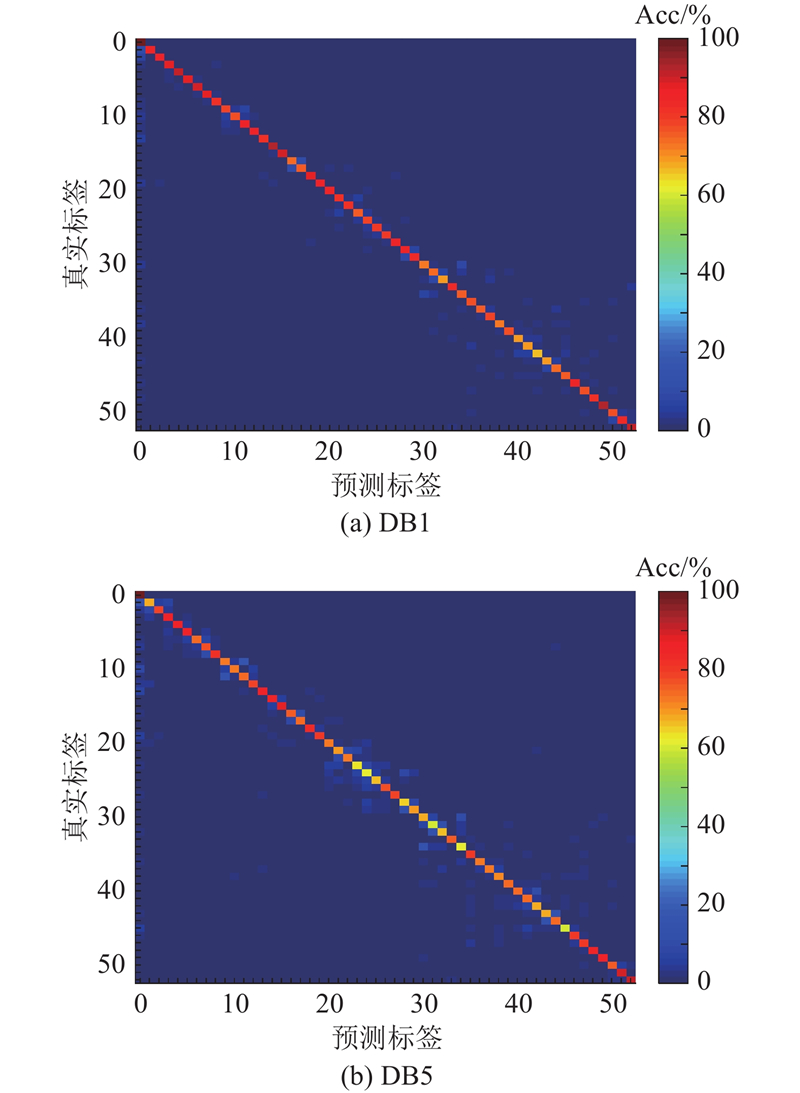
... 在2个子数据库中对比不同方法的低采样率肌电手势识别性能,结果如表7 所示. DB1的采样率为100 Hz,本研究所提方法的手势动作识别准确率高于对比方法的识别准确率;DB5的采样率为200 Hz,本研究所提方法的53种手势动作识别准确率高于对比方法的识别准确率,52种手势动作的识别准确率比Peng等[46 ] 方法的识别准确率低0.83%. 分析原因,Peng等[46 ] 采用的滑动窗口大小比所提方法高100 ms,滑动窗口大小会影响分类性能,滑动窗口越大,分类误差越小[47 ] . 所提方法在滑动窗口大小上比Peng等[46 ] 方法低100 ms的情况下,取得了与Peng等[46 ] 方法相近的识别准确率. 对比结果表明,所提方法在采样率为100、200 Hz的低采样率sEMG手势识别上有效. ...
... [46 ]采用的滑动窗口大小比所提方法高100 ms,滑动窗口大小会影响分类性能,滑动窗口越大,分类误差越小[47 ] . 所提方法在滑动窗口大小上比Peng等[46 ] 方法低100 ms的情况下,取得了与Peng等[46 ] 方法相近的识别准确率. 对比结果表明,所提方法在采样率为100、200 Hz的低采样率sEMG手势识别上有效. ...
... [46 ]方法低100 ms的情况下,取得了与Peng等[46 ] 方法相近的识别准确率. 对比结果表明,所提方法在采样率为100、200 Hz的低采样率sEMG手势识别上有效. ...
... [46 ]方法相近的识别准确率. 对比结果表明,所提方法在采样率为100、200 Hz的低采样率sEMG手势识别上有效. ...
... Performance comparison with different gesture recognition methods
Tab.7 手势数量 数据库 方法 Acc/% 53 DB5 Li等[27 ] 70.40 DB1 Tsinganos等[29 ] 72.06 DB5 Xu等[44 ] 87.42 DB5 Josephs等[45 ] 87.09 DB1 本研究 90.89 DB5 本研究 89.90 52 DB1 He等[28 ] 75.45 DB5 Shen等[24 ] 74.51 DB1 Geng等[38 ] 77.80 DB1 Du等[43 ] 79.50 DB5 Peng等[46 ] 77.90 DB1 本研究 82.01 DB5 本研究 77.07
2.5. 消融实验 在2个子数据库中分析所提方法的变量及验证子域适应网络对会话内手势识别的影响,消融实验结果如表8 所示. 在E2结构中,加入BN层和ReLU层能够明显提升模型的低采样率肌电手势识别性能,原因是BN层减少了内部协变量偏差的影响,ReLU层对激活输入值进行单侧抑制,避免了梯度消失,加快了网络的训练速度. 在E3结构中,对低采样率sEMG信号的信息进行扩展后再送到特征提取网络有利于提升模型的低采样率肌电手势识别性能. 在E4结构中,子域适应网络能够提升模块的会话内手势识别性能,将子域适应网络与卷积神经网络、信息扩展层结合,将子域适应损失和分类损失反向传播给特征提取网络,通过模型的不断迭代来提取源域与目标域的域不变表示,降低了电极移位、肌肉疲劳、皮肤阻抗的变化和肌肉相对电极的相对运动等因素对低采样率肌电手势识别的影响. 消融实验结果表明,所提方法的模型结构变化对提升采样率为100、200 Hz的低采样率肌电手势识别性能有益. ...
Determining the optimal window length for pattern recognition-based myoelectric control: balancing the competing effects of classification error and controller delay
1
2011
... 在2个子数据库中对比不同方法的低采样率肌电手势识别性能,结果如表7 所示. DB1的采样率为100 Hz,本研究所提方法的手势动作识别准确率高于对比方法的识别准确率;DB5的采样率为200 Hz,本研究所提方法的53种手势动作识别准确率高于对比方法的识别准确率,52种手势动作的识别准确率比Peng等[46 ] 方法的识别准确率低0.83%. 分析原因,Peng等[46 ] 采用的滑动窗口大小比所提方法高100 ms,滑动窗口大小会影响分类性能,滑动窗口越大,分类误差越小[47 ] . 所提方法在滑动窗口大小上比Peng等[46 ] 方法低100 ms的情况下,取得了与Peng等[46 ] 方法相近的识别准确率. 对比结果表明,所提方法在采样率为100、200 Hz的低采样率sEMG手势识别上有效. ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}