

本研究提出自适应变分模态分解与递归量化分析 (AVMD-RQAT) 的信号特征提取方法,结合卷积神经网络(CNN)识别,用于CFRP超声检测多种类、大规模缺陷数据,并与文献[12]的结果进行对比验证.
1. 超声相控阵缺陷检测
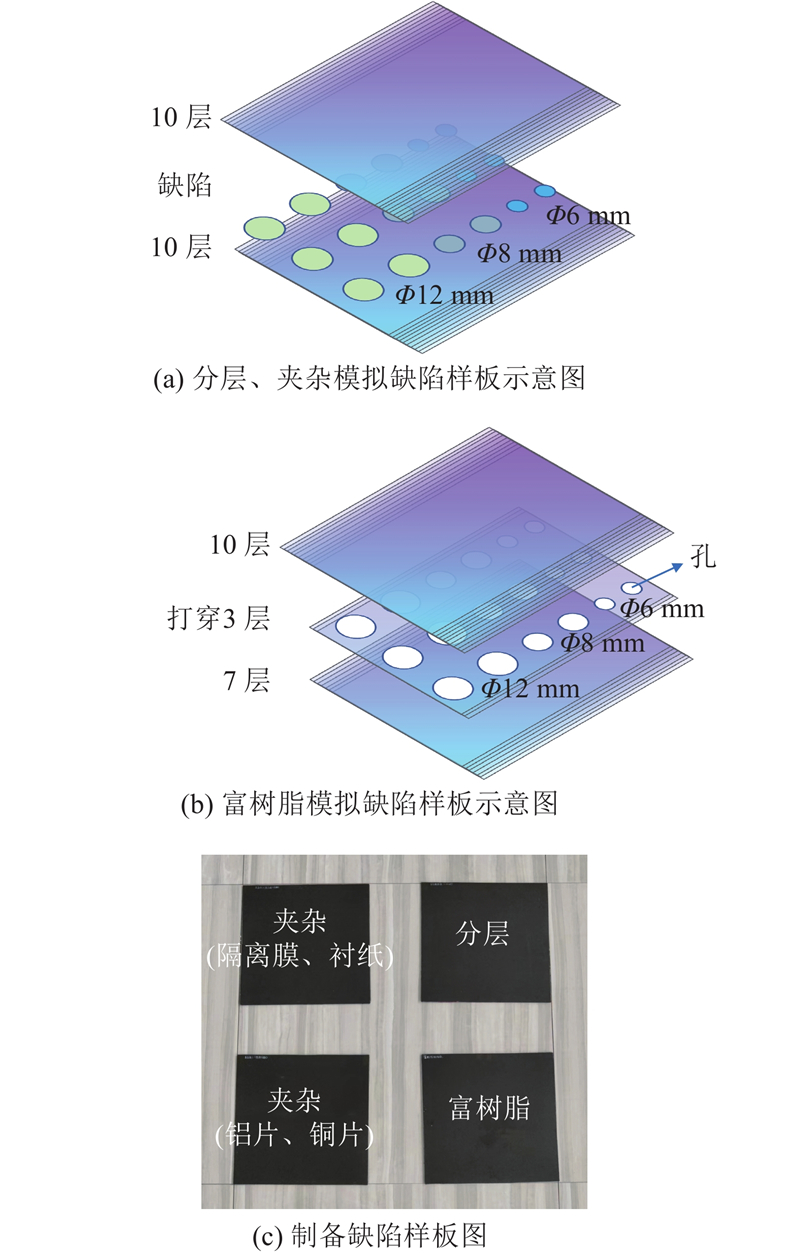
CFRP缺陷样板的制备采用预浸料手工铺层与热压罐工艺固化完成. 预浸料来自威海光威复合材料股份有限公司,型号为GW800G/GS-13,以T800碳纤维为增强体,GS13环氧树脂为基体,GS-13树脂质量分数为34%,厚度为0.187 mm,所裁剪的预浸料尺寸为330 mm×330 mm. 为了更好地模拟实际工况中出现的不同缺陷类型,分别使用聚四氟乙烯、预浸料隔离膜、预浸料衬纸、铜片、铝片模拟缺陷. 其中,利用聚四氟乙烯模拟分层缺陷,利用预浸料隔离膜、预浸料衬纸、铜片、铝片模拟4种夹杂缺陷. 采用打穿预浸料的方式,使其在固化过程中让树脂从孔隙流入,形成富树脂缺陷.
1.1. 超声波传播特性
1.1.1. 声速
简谐波在材料中传播时,单位时间内穿过的距离为该波的传播速度,通常用c表示. 对于不同类型的超声波,传播速度存在差异,固体材料中的声速计算公式如下所示.
式中:E为弹性模量,
1.1.2. 声阻抗
超声波在材料中传播时,任意一点声压p与该点速度振幅
对于平面波而言,声阻抗等于材料密度与材料声速的乘积,可以直接表示介质的声学特性,是材料固有的特征参数.
1.1.3. 界面反射与透射
当超声波入射到声阻抗不同的异质界面时,如图1所示,入射波一部分透射进入材料2,另一部分在界面处反射后继续在材料1中传播. 声压反射系数与透射系数的计算公式如下:
图 1
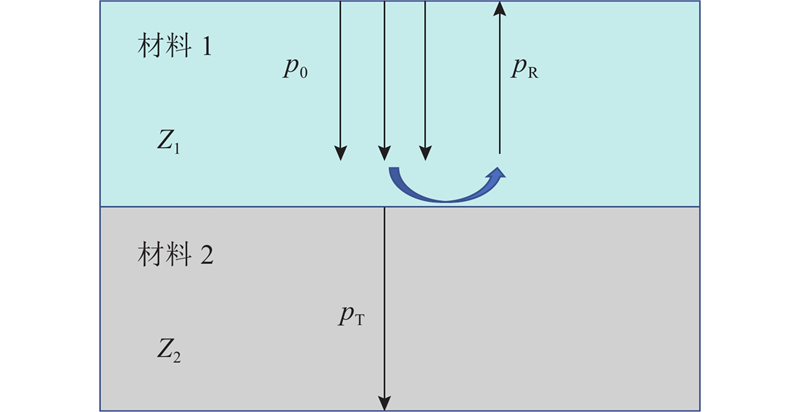
图 1 超声信号反射透射的示意图
Fig.1 Schematic diagram of ultrasonic signal reflection and transmission
式中:pR为界面上反射波声压;p0为入射波声压;pT为界面上透射波声压;
6种模拟缺陷材料的特性如表1所示. 表中,反射率是指从碳纤维复合材料到目标材料时的反射情况,相位表示超声信号从碳纤维复合材料入射到其他材料时相位的变化情况. 6种材料形成的反射波中,有4种材料与入射波相位相反,2种材料与入射波相位相同. 在相位相反的材料中,从环氧树脂到衬纸,反射率的绝对值依次递增,反射波的幅值递增. 在相位相同的材料中,铝比铜的反射率小,故在超声信号中铝的缺陷位置反射回波比铜的波高低.
表 1 6种缺陷材料性能的对比表
Tab.1
| 材料 | 密度/(kg·m−³) | 弹性模量/GPa | 声速/(m·s−1) | 声阻抗/(Pa·s·m−1) | 反射率 | 相位情况 |
| CFRP | 1.5×103 | 89.45 | 3070 | 4.61×106 | 0 | 无 |
| 环氧树脂 | 1.48×103 | 3 | 2972 | 4.4×106 | −0.0228 | 相位相反 |
| PE膜 | 1.24×103 | 0.9 | 2460 | 3.05×106 | −0.203 | 相位相反 |
| 聚四氟乙烯(PTFE) | 2.1×103 | 0.28 | 1400 | 2.94×106 | −0.221 | 相位相反 |
| 衬纸 | 1×103 | 2 | 1500 | 1.5×106 | −0.509 | 相位相反 |
| 铜 | 8.96×103 | 117 | 4660 | 4.18×107 | 0.801 | 相位相同 |
| 铝 | 2.7×103 | 70 | 6320 | 1.71×107 | 0.575 | 相位相同 |
1.2. 模拟缺陷样板制备
图 2
1.3. 超声相控阵检测系统的搭建
相控阵设备为Olympus公司的FOCUS PX M/N: FPX-1664PR,楔块是Olympus SNW1-0L-IHC,探头为5L64-NW1,所用软件为Olympus公司配套的FocusPC,扫描时不使用延时法则,相控阵的64个阵元按照编码器每移动1 mm采集一次数据的方式,对缺陷样板扫描. 搭建超声相控阵检测系统,如图3所示.
图 3

图 4
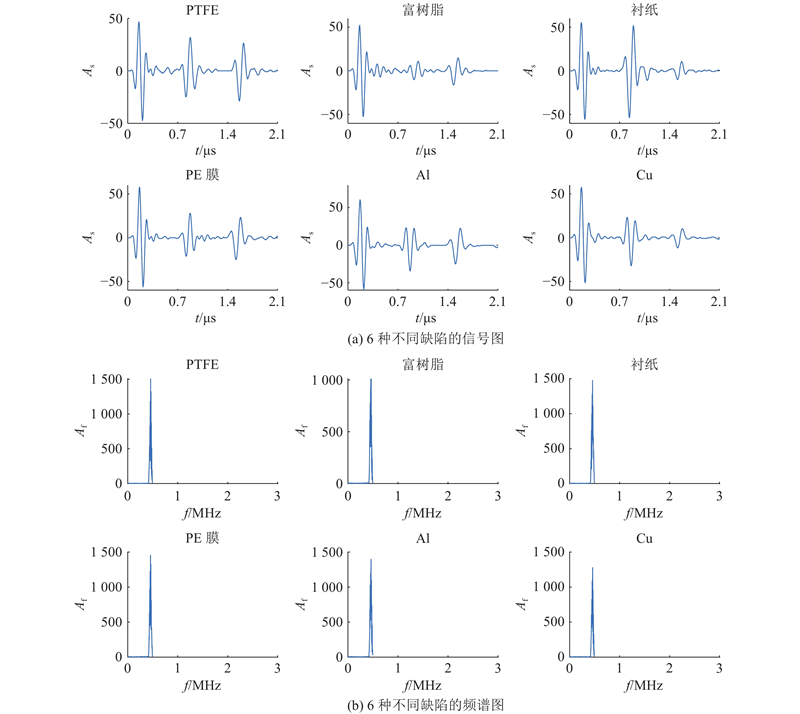
图 4 6种不同缺陷信号的传统分析图
Fig.4 Traditional analysis plot for six different defect signals
2. 自适应VMD信号分解
测量过程中噪声信号的存在对信号特征的提取存在影响,为了降低噪声信号的影响并充分提取信号的特征信息,对信号进行VMD分解,得到不同的本征模态函数(intrinsic mode functions, IMF)分量. 过滤高频噪声部分实现去噪,利用剩余分量进行特征提取.
2.1. VMD原理
VMD方法是由Dragomiretskiy等[21]提出,用于迭代求解变分问题,将复杂信号分解成调幅调频的模态分量信号. VMD的目标是将输入信号f分解为离散数量的子信号
图 5
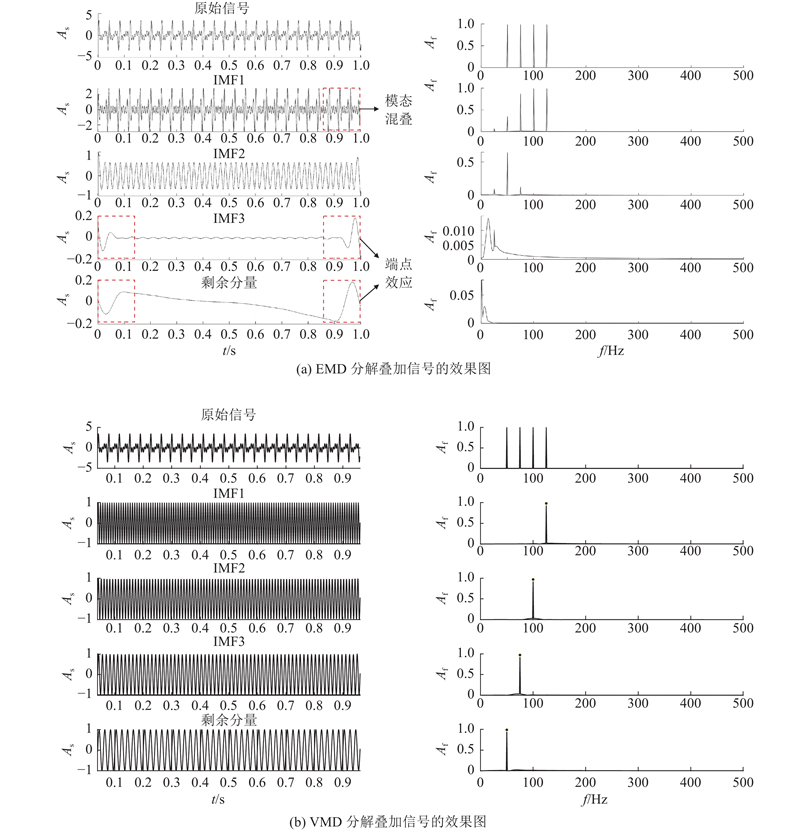
图 5 EMD与VMD分解叠加信号效果的对比图
Fig.5 Comparison chart of EMD and VMD decomposition superposition signal effect
VMD的核心思想是构建和求解变分问题,变分问题的求解过程为模态分解过程,为了评估一个模态的带宽,简要由以下步骤来开展. 1)对于每一个模态
构造变分问题,假设原始信号f被分解为K个分量,保证分解序列为具有中心频率的有限带宽的模态分量,同时各模态的估计带宽之和最小,约束条件为所有模态之和与原始信号相等. 上述对应的约束变分表达式为
式中:K为需要分解的模态数;
为了求解上述约束变分问题,引入Lagrange乘法算子λ,将约束变分问题转换为非约束变分问题,得到增广Lagrange表达式:
式中:
式中:
通过VMD算法原理可知, K与
2.2. 蝠鲼智能优化算法
利用该算法模仿蝠鲼在海洋中的觅食过程,针对蝠鲼的不同捕食策略进行数学建模,在复杂解空间中搜索最优解.
2.2.1. 3种觅食方式及数学原理
根据蝠鲼的觅食特点进行数学建模,形成以下3种觅食方式的数学模型.
1)链式觅食.
在链式捕食过程中,蝠鲼种群从头到尾排成一条捕食链. 蝠鲼个体下一位置的移动方向与步长是由当前最优解与前一个体位置共同决定. 该种位置更新方式的数学模型如下:
式中:r为在(0,1.0)上均匀分布的随机数,
2)螺旋觅食.
蝠鲼个体在发现某猎物后,采用螺旋的方式向其靠近,由于链式觅食的存在,在向当前猎物螺旋移动的过程中,受到前一个个体的影响. 该种位置更新方式的数学模型如下.
当t/T > rand时,蝠鲼螺旋状运动的数学方程为
当t/T
式中:
3)翻滚觅食.
在翻滚捕食中,蝠鲼个体以当前最优解作为翻滚支点,翻滚至与当前位置成镜像关系的另一侧. 该种位置更新方式的数学模型如下:
式中:
2.2.2. 蝠鲼智能优化算法的执行流程图
初始化种群数量、参数维度、参数上下限、适应度函数、最大迭代次数. 其中种群数量为蝠鲼群体的大小,在同等条件下,群体大小与搜索空间步长成反比. 参数维度为优化参数的个数,如在本场景下,优化参数为K值与Alpha值,则参数维度为2. 参数上下限为搜索空间范围. 适应度函数表示当处于搜索空间某一位置时,该位置处优化参数的评价函数.
根据随机数决定采用何种觅食方式更新位置,再执行翻滚觅食,使用最小包络熵作为适应度函数,计算适应度,适应度与迭代次数决定是否停止迭代. 算法的执行流程如图6所示.
图 6
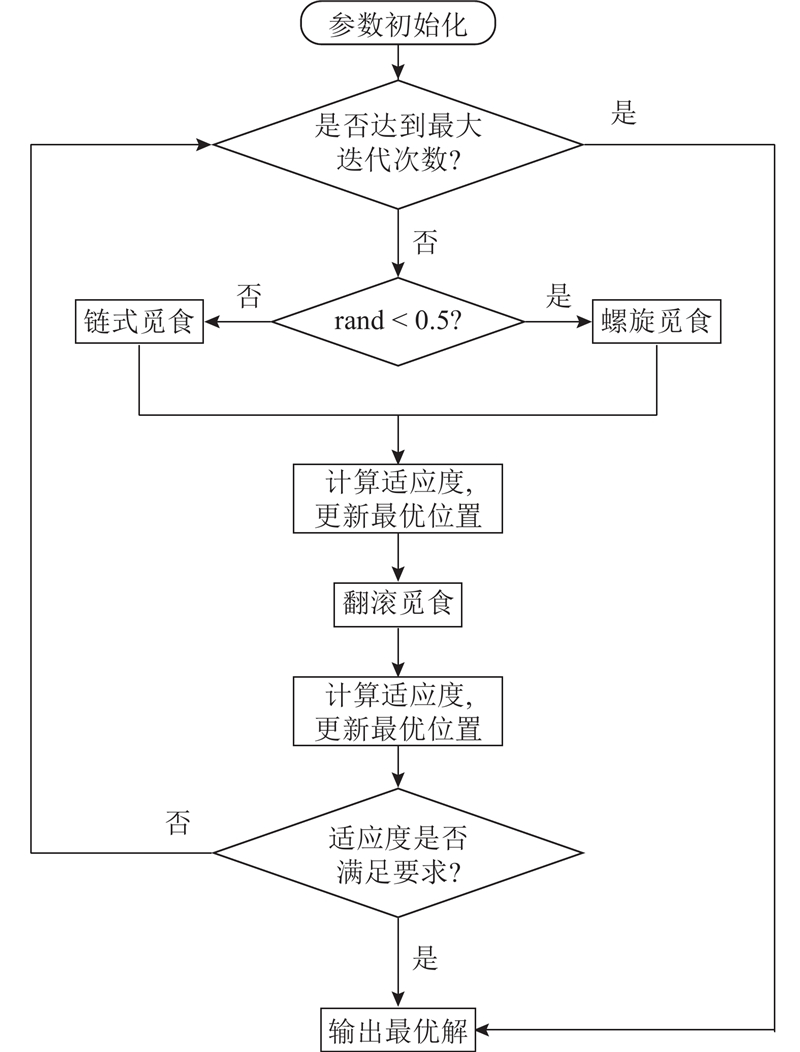
图 6 蝠鲼智能优化算法的执行流程图
Fig.6 Execution flowchart of manta ray intelligent optimization algorithm
2.3. 自适应信号分解
结合VMD与蝠鲼智能优化算法,提出自适应变分模态分解方法,用于自适应搜寻VMD分解时的最佳参数组合.
该方法通过检验是否存在K、Alpha值,确定是否需要使用蝠鲼智能优化算法进行优化寻解,初始时将信号输入系统,系统检测该信号对象分解参数K与Alpha变量是否有实值. 若不存在实值,则使用蝠鲼智能优化算法优化寻参,直至具备分解参数,完成VMD分解过程. 自适应变分模态分解的执行流程图如图7所示.
图 7
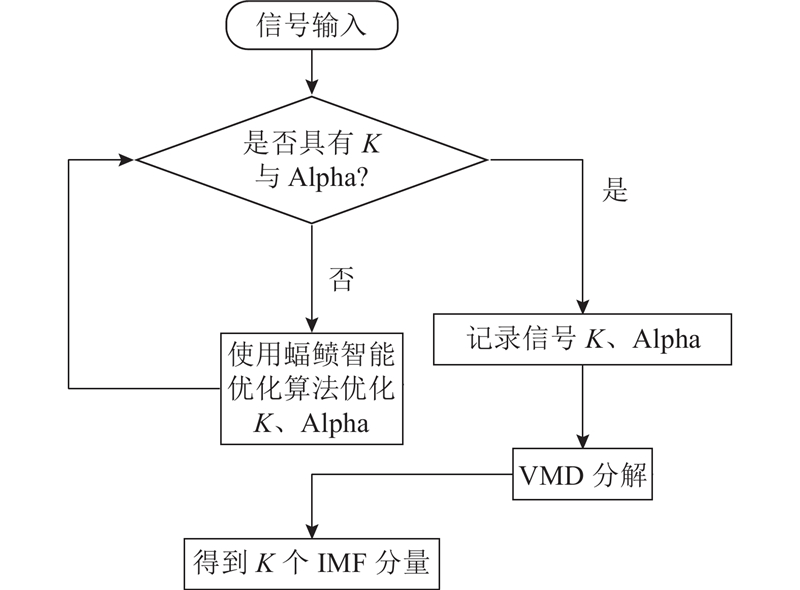
图 8
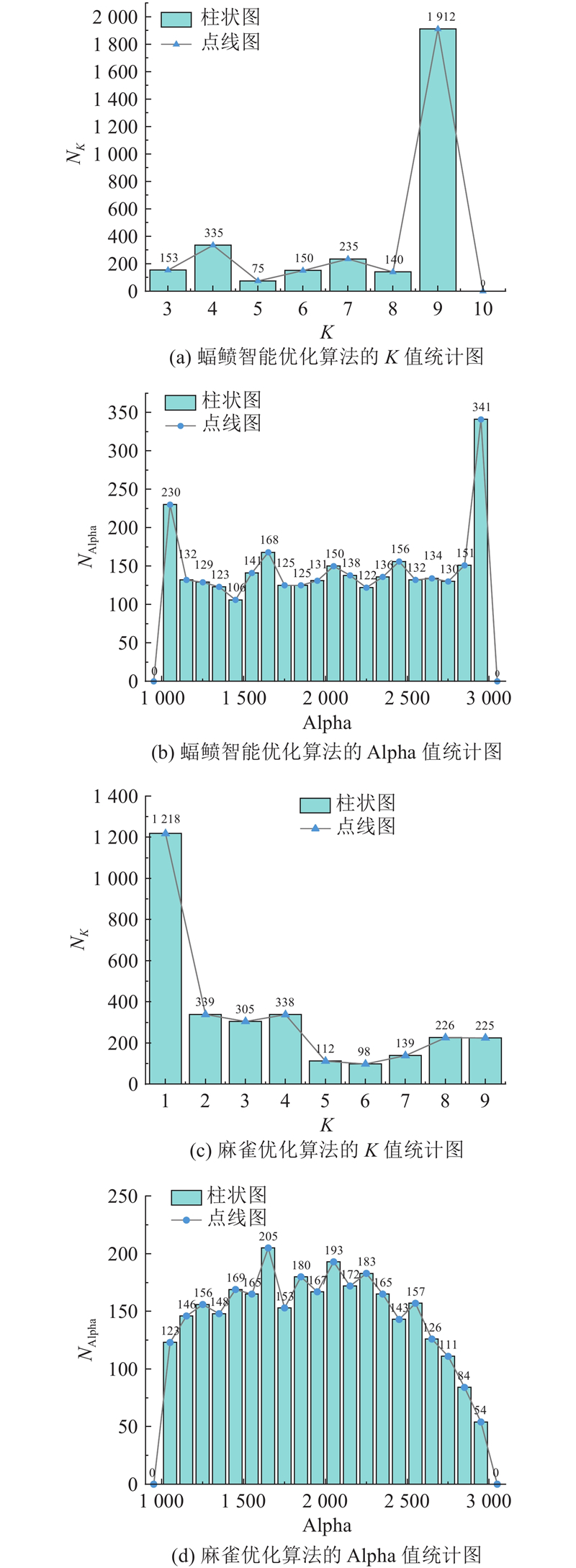
图 8 2种算法参数优化的统计对比图
Fig.8 Statistical comparison chart of parameter optimization of two algorithms
将2种算法优化后的K、Alpha进行数据分析,分别分析均值、标准差、众数、中位数、极差,如表2所示. 2种算法对于K的优化,其中SSA均值、众数、中位数的数值相差较大,且标准差大于MRFO,出现了众数为1的情形;对于Alpha的优化,SSA标准差明显大于MRFO. 综合分析可知,MRFO的优化稳定性明显高于SSA方法.
表 2 2种算法的优化结果对比表
Tab.2
| 方法 | 参数 | 均值 | 标准差 | 众数 | 中位数 | 极差 |
| SSA | K | 3.4 | 2.7 | 1 | 2 | 8 |
| MRFO | 7.7 | 2.0 | 9 | 9 | 6 | |
| SSA | Alpha | 1936.4 | 625.3 | 1650 | 1936.8 | 1998.7 |
| MRFO | 2048.6 | 521.9 | 2950 | 2065.7 | 1999.4 |
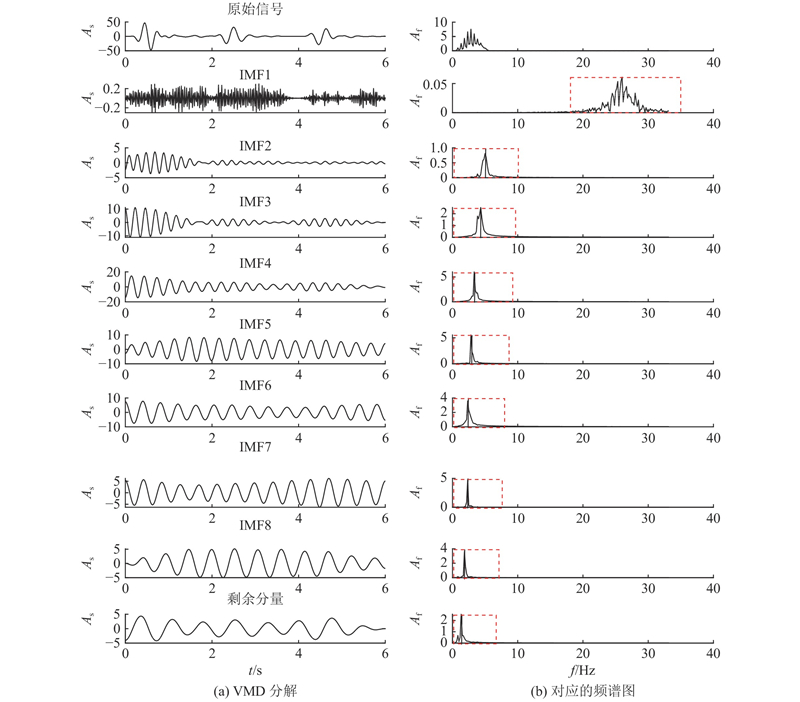
为了使整体数据得到充分分解,降低参数选取对分解结果的影响,分别选取优化K、Alpha的众数作为VMD分解的参数,K选择为9,Alpha选择为2 950. 对6种缺陷进行VMD分解,以分层缺陷为例,分解图如图9所示. 将各IMF分量的频率中心标记为虚线位置,除噪声外,其余每个模态函数的频谱在不同的频率范围内有明显的能量集中. 相邻模态函数的频谱在频域上有明显差异,能够将不同频率范围的IMF分量充分分解,且分解后,各IMF分量的频谱未出现重叠现象,表明AVMD方法对缺陷信号的分解充分且不过度. 分解图中IMF1分量出现高频噪声,对特征提取存在影响,属于无效特征信息,故筛选掉高频IMF1分量,对IMF2~IMF9进行特征提取.
图 9
3. 递归量化分析特征提取
缺陷特征是缺陷识别的关键,从缺陷中提取关键信息,找出缺陷间存在的差异,能够提高识别准确率. 对于上述筛选后的IMF分量,采用递归量化分析技术,提取对应的量化特征值,构建缺陷的特征向量.
3.1. 递归量化分析原理
3.1.1. 递归图
递归图(recurrence plots, RP)是由Eckmann等[24]提出的,用于使动态系统的递归特性可视化. 将递归图应用在时间序列上,将时间序列的时域空间变换到相空间,从而将时域中的每个点
式中:
1)相空间重构.
相空间重构是由已知的时间序列来恢复并刻画原动力系统的方法,是由时域空间变换到相空间的过程. 相空间重构过程有2个关键的参数:嵌入维数d、延迟时间
假设一维时间序列为
延时时间是指在相空间中选择的2个状态之间的时间间隔. 当
嵌入维度用于控制相空间重构后高维空间的维数,直接决定系统的几何结构是否被完全打开.
2)延时时间
对于
假设2个离散信息系统
式中:
式中:
以上述理论为基础,计算时间延时,定义
式(26)利用
3)嵌入维度
常用的嵌入维度确定方法有虚假临近点法和Cao方法. 其中Cao方法克服了虚假临近点法噪声敏感和需要选取阈值的主观性缺点,用较少的数据量便可求出嵌入维度,原理如下.
时间序列
式中:d为嵌入维度,
式中:
从式(29)可以看出,
当
图 10
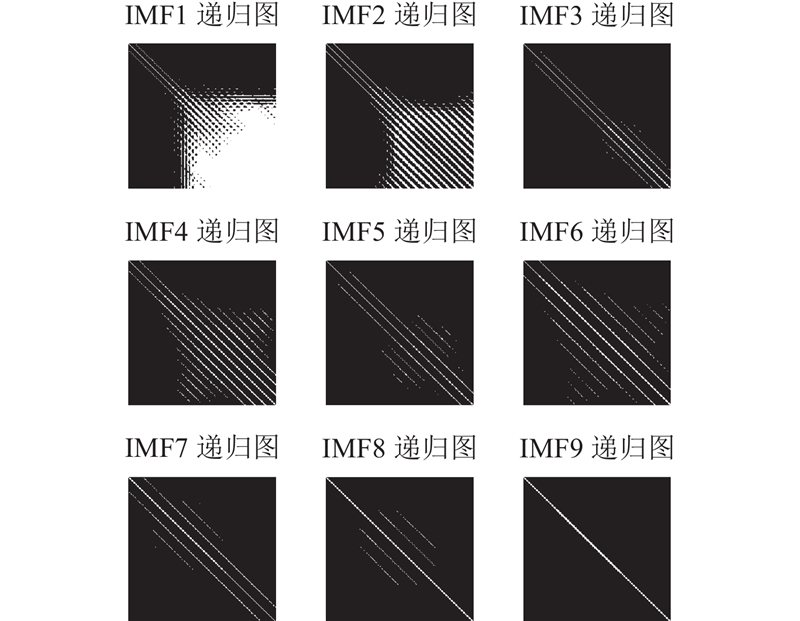
图 10 分层缺陷各IMF分量递归图
Fig.10 Recursive plot of each IMF component of delamination defect
3.1.2. 递归量化分析
1)递归度(RR)为递归图中递归点数量占总点数的比例,计算公式为
2)确定率(DER)为45°对角线上递归点占总点数的百分比,计算公式为
式中:
3)递归熵(ENTR)为45°对角线方向相邻像素点个数的分布概率的香农熵,计算公式为
4)比率(RATIO)为确定率与递归率的比值,计算公式为
5)平均对角线长度L为递归图中平行于45°对角线方向线段的平均长度,计算公式为
6)层状度(LAM)为构成竖直或水平线段结构的递归点的百分比,计算公式为
式中:
7)圈闭时间(TT)为递归图中垂直结构长度的均值,计算公式为
8)最长对角线
式中:
9)最长水平线段
式中:
利用以上9个指标,可以将递归图中的特征描述为数值参量,开展数值分析. 如图10所示为检测信号每一个IMF分量的递归图. 为了保留缺陷信息的完整性,对除噪声外每一IMF分量的递归图进行量化分析.
3.2. 模态分量递归量化分析
对CFRP超声检测缺陷的3 000个数据进行递归量化分析,发现存在115个问题数据. 原始信号时域上变化较快,频率较高,递归矩阵无法显示系统特性,将115个问题数据过滤筛选,统计剩余2 885个数据的IMF2~IMF9递归量化分析结果. 对6种缺陷信号进行编号,1~6分别表示分层缺陷、富树脂缺陷、夹杂-衬纸缺陷、夹杂-隔离膜缺陷、夹杂-铝片缺陷、夹杂-铜片缺陷,对缺陷信号的每个IMF分量进行递归量化分析. 以IMF3分量为例,递归量化分析结果的平均值如表3所示. 递归度中,2与3明显高于其他缺陷. 确定率中,4明显低于其他缺陷. 递归熵中,1、4明显低于其他缺陷. 比率中,除3、6数值差距较小外,其余缺陷差距较大. 层状度中,1、4明显低于其他缺陷. 圈闭时间中,2、3明显高于其他缺陷. 最长对角线数值中,4明显低于其他缺陷. 最长水平线数值中,1、4、5明显低于6,且6明显低于2、3. 平均对角线长度数值中,5明显高于其他缺陷. 递归量化分析指标中的9个特征能够表征1个IMF分量的特点,为了充分提取缺陷信息,利用IMF2~IMF9递归量化分析后的72个(8×9)特征值构建特征向量,表征一个缺陷.
表 3 2885数据IMF3分量递归量化分析参数平均值的汇总表
Tab.3
| 类型 | RR | DER | ENTR | RATIO | LAM | TT | Lmax | Hmax | L |
| 1 | 0.03 | 0.81 | 1.33 | 34.12 | 0.61 | 2.37 | 243.27 | 3.10 | 45.59 |
| 2 | 0.11 | 0.93 | 2.02 | 11.92 | 0.92 | 8.29 | 258.05 | 43.36 | 46.41 |
| 3 | 0.08 | 0.90 | 1.91 | 17.50 | 0.88 | 7.43 | 233.06 | 40.36 | 46.26 |
| 4 | 0.02 | 0.73 | 1.27 | 48.63 | 0.54 | 2.45 | 195.46 | 2.95 | 47.93 |
| 5 | 0.04 | 0.87 | 1.69 | 26.73 | 0.81 | 3.05 | 235.22 | 5.59 | 55.15 |
| 6 | 0.05 | 0.90 | 1.87 | 19.27 | 0.88 | 4.16 | 253.29 | 15.22 | 44.34 |
4. CNN神经网络分类识别
卷积神经网络是深度学习模型,广泛应用于计算机视觉任务,如分类和目标检测. CNN的设计灵感来源于生物学中视觉皮层的工作原理,通过一系列的卷积、池化和全连接层,自动学习输入数据的特征表示. 为了提高检测效率,使用轻量级CNN识别模型,模型识别过程能在几秒内完成. 该轻量级模型在保持较高识别性能的同时,减少了模型的计算和存储资源需求. 通过优化网络结构和参数设置,使其在嵌入式设备和资源受限环境下具备更强的实用性. 模型结构如图11所示.
图 11

对原始数据进行预处理,包括对数据进行贴标签和特征提取处理,每个缺陷信号的特征被视为8×9×1的模块进行输入. 使用的CNN模型包含输入层、2个卷积块、全连接层和输出层. 每个卷积块由卷积层、批归一化层、ReLU激活层和最大池化层组成. 第1个卷积块有16个输出通道,第2个卷积块有32个输出通道. 全连接层具有64个神经元,使用ReLU激活函数进行非线性变换. 输出层通过softmax函数输出类别概率. 训练时使用随机梯度下降算法,设置最大训练迭代次数为100. 训练集和测试集的准确率通过混淆矩阵进行评估和可视化,使用的CNN神经网络训练模型参数如表4所示.
表 4 CNN神经网络训练模型的参数
Tab.4
| 输入层 | 卷积层 | 卷积层 | 卷积层 | 池化层 | 全连接层 | 全连接层 | 输出层 |
| 8×9×1 | 3×3,16 | 2×2,2 | 3×3,32 | 2×2,2 | 64 神经元 | 6 神经元 | 6 层 |
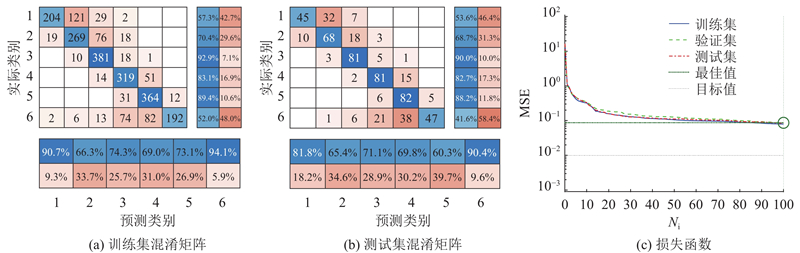
在筛去问题数据后,剩余共2 885个数据,其中分层440个、富树脂481个、夹杂-衬纸500个、夹杂-隔离膜482个、夹杂-铝片500个、夹杂-铜片482个,利用以上数据构建数据集. 分别使用李健等[12]提出的小波包分解与BP神经网络、本文的特征提取方法结合BP神经网络、本文的特征提取方法结合CNN神经网络3种方法进行识别. 将数据按8∶2的比例划分为训练集与测试集,利用小波包与BP神经网络方法得到的混淆矩阵及误差如图12所示. 图中,Ni为训练轮次,MSE为均方根误差. 训练集的识别正确率为71.66%,测试集的识别正确率为65.86%. 当训练轮次为100时,最佳验证误差为0.09. 从识别结果来看,训练集和测试集的正确率均较低,在实际的大规模扫描数据场景中不适用.
图 12
使用本文提出的特征提取方法对缺陷进行特征提取,将提取出的特征值输入BP神经网络识别,其中缺陷的特征数据按8∶2的比例划分为训练集和测试集,识别结果如图13所示. 训练集的识别正确率为91.12%,测试集的识别正确率为87.52%,当训练轮次为100时,最佳验证误差为0.04. 从识别结果来看,训练集和测试集的识别正确率相较于小波包分解特征提取与BP神经网络识别方法有明显提高.
图 13
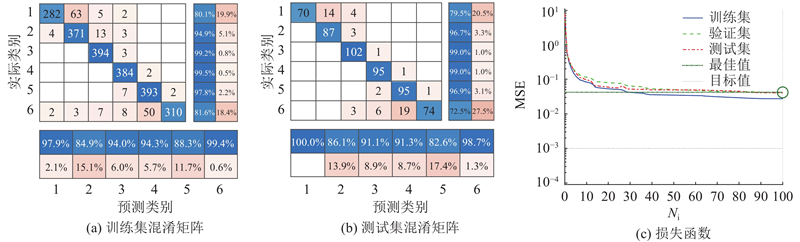
图 13 RQAT与BP神经网络方法的识别效果图
Fig.13 Identify renderings of RQAT and BP neural network method
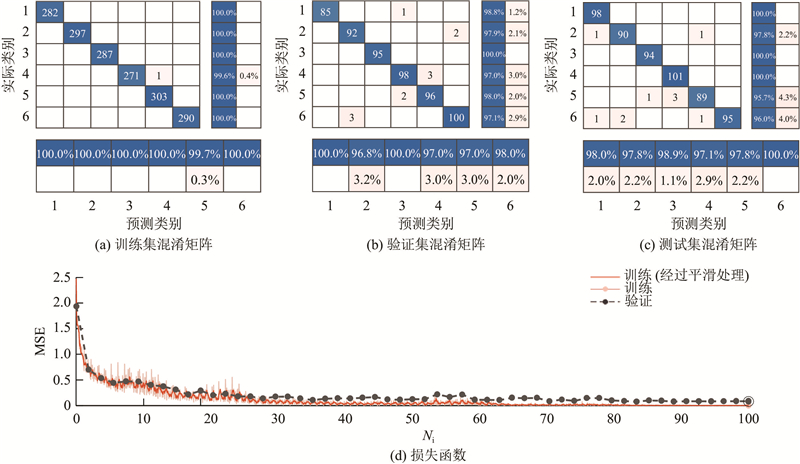
为了进一步提高识别正确率,使用提出的自适应变分模态分解和递归量化分析特征提取方法,对缺陷信号进行特征提取后,输入CNN神经网络识别,在识别过程中增加验证集,将特征提取后的数据按6∶2∶2的比例划分为训练集、验证集、测试集,识别结果如图14所示. 训练集的识别正确率为99.94%,验证集的识别正确率为98.09%,测试集的识别正确率为98.27%. 当训练轮次为100时,最佳验证误差为0.03. 从识别结果来看,将本研究方法特征提取后的缺陷特征输入CNN神经网络后,相较于输入BP神经网络,识别正确率得到提高,能够更好地适应实际工况.
图 14
5. 结 论
(1)利用本文提出的基于蝠鲼智能优化算法的VMD方法,可以有效地解决VMD分解时关键参数K与Alpha的确定问题.
(2)利用本文提出的自适应变分模态分解和递归量化分析方法,能够对CFRP超声无损检测实现去噪与特征提取. 将提取出的72个特征值放入CNN中,能够实现高准确率的识别分类,识别正确率达到98.27%,为后续CFRP缺陷的高质量成像及精确定量研究工作奠定基础.
参考文献
Design for carbon fiber lamination of PMI foam cored CFRP sandwich composite applied to automotive rear spoiler
[J].DOI:10.1007/s12221-020-9489-4 [本文引用: 1]
Automatic defect depth estimation for ultrasonic testing in carbon fiber reinforced composites using deep learning
[J].
Development and application of infrared thermography non-destructive testing techniques
[J].DOI:10.3390/s20143851 [本文引用: 1]
Enhanced composite plate impact damage detection and characterization using X-Ray refraction and scattering contrast combined with ultrasonic imaging
[J].
Damage characterization of polymer-based composite materials: multivariable analysis and wavelet transform for clustering acoustic emission data
[J].DOI:10.1016/j.ymssp.2007.11.029 [本文引用: 1]
含夹杂缺陷碳纤维复合材料层压板的无损检测与评估研究
[J].
Nondestructive testing and evaluation of carbon fiber reinforced polymer laminates with inclusions
[J].
Research on ultrasonic defect identification method of well control manifold pipeline based on IAFSA-SVM
[J].
Feature extraction and gating techniques for ultrasonic shaft signal classification
[J].DOI:10.1016/j.asoc.2005.05.003 [本文引用: 1]
Rolling bearing fault diagnosis based on EWT sub-modal hypothesis test and ambiguity correlation classification
[J].DOI:10.3390/sym10120730 [本文引用: 1]
超声相控阵检测CFRP缺陷识别方法
[J].
Ultrasonic phased array detection CFRP defect identification method
[J].
Timber damage identification using dynamic broad network and ultrasonic signals
[J].
Research on feature extraction and classification of ultrasonic flaw
[J].
钢板缺陷识别的Volterra-SVM模型研究
[J].
Study on Volterra-SVM model for defect recognition of steel plate
[J].
基于LBP-KPCA特征提取的焊缝超声检测缺陷分类方法
[J].
A defect classification method for ultrasonic testing of welds based on LBP-KPCA feature extraction
[J].
Empirical mode decomposition and rough set attribute reduction for ultrasonic flaw signal classification
[J].DOI:10.1080/18756891.2014.889877 [本文引用: 1]
Feature extraction of wood-hole defects using empirical mode decomposition of ultrasonic signals
[J].
Damage detection of composite laminate structures using VMD of FRF contaminated by high percentage of noise
[J].
Variational mode decomposition
[J].
麻雀算法参数优化VMD联合K-SVD滚动轴承故障诊断
[J].
Fault diagnosis of VMD combined with K-SVD rolling bearing for parameter optimization of sparrow algorithm
[J].
Recurrence plots of dynamical systems
[J].
Dynamical assessment of physiological systems and states using recurrence plot strategies
[J].DOI:10.1152/jappl.1994.76.2.965 [本文引用: 1]
Detecting nonstationarity and state transitions in a time series
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}