

目前,结构响应重构技术主要有以下3类方法:模态分析类方法[11-13]、传递矩阵类方法[14-16]及滤波类方法[17-19]. 其中,传递矩阵类和滤波类方法是目前应用最广泛的响应重构方法. Ribeiro等[14]最先给出传递率矩阵的概念. Law等[15]提出基于频域广义传递率的结构响应重构方法,通过7层平面框架验证了方法的精度. 毛羚等[16]结合响应重构和遗传算法进行结构损伤识别,利用少数测量响应重构了目标位置响应. 此外,卡尔曼滤波(Kalman filter, KF)算法能够考虑结构系统和测量中的不确定性. 张笑华等[17]基于KF提出结构多类型响应重构的方法,对不同类型传感器的位置进行优化,用于响应重构. Zhang等[18]提出用于结构响应优化重构的KF自适应模态选择方法. KF能够取得最优估计,但忽略了工程中常见的有色噪声,难以保证重构结果的可靠性. 粒子滤波(particle filter, PF)算法能够弥补这一空缺,史鹏程等[19]提出2步结构响应重构方法,在一步重构基础上引入PF方法,考虑了有色噪声的影响. 上述方法均需要在外部载荷已知的前提下重构,但外部冲击载荷往往难以直接获得,在工程应用中综合考虑外载荷识别与响应重构显得十分重要. 目前,针对载荷识别的正则化方法主要有L2正则化[20]和L1正则化[21]. 前者即Tikhonov正则化,根据最小化原理识别冲击载荷,能够满足光滑度要求,但正则化参数选取困难且L2解通常是非稀疏的,在载荷的非加载区域振荡较大. L1正则化能够保留解的稀疏特征,但光滑度较差,且噪声较大时会降低识别结果的稳定性,甚至造成识别错误.
针对上述问题,本文采用单类型传感器及小样本的测量信息,提出基于修正-联合正则化的冲击载荷识别与结构响应重构方法,旨在克服响应重构中冲击载荷的识别振荡、光滑度较差及识别精度易受噪声干扰等问题. 推导结构冲击载荷及动态响应的重构方程. 探究新型的修正-联合正则化方法并用于冲击载荷的求解,以提高冲击载荷峰值的识别精度与非加载区域识别结果的稳定性. 利用传递矩阵法和PF算法重构结构动态响应,通过某动车轮对数值算例和外伸梁试验验证了所提方法的有效性.
1. 载荷识别及响应重构模型
结构在外部载荷作用下的运动方程可以表示为
式中:M、C、K分别为质量、阻尼和刚度矩阵,
式中:
1.1. 载荷反演
通过定义
式中:
下标c表示连续时间系统. 输出响应为
式中:
根据式(1)、(4),可得
式中:
式中:
将状态向量代入观测向量,可得
假设初始条件
式中:
式(8)为响应传递方程. 测量位置的响应传递方程可以表示为
式中:
依据式(10)可得外载荷f的解,即载荷反演的数学模型,表示为
式中:
1.2. 响应重构
1.2.1. 传递矩阵法
传递矩阵的结构响应重构方法[16]的基本思想是通过建立测量位置处响应与待重构位置响应间的传递函数,重构目标位置处的动态响应. 响应重构方程可以表示为
式中:
基于传递矩阵的结构响应重构方法可能会因为系统模型误差而导致重构精度大幅下降,PF算法能够很好地处理系统模型误差及有色噪声,因此引入PF方法进行结构响应重构.
1.2.2. 粒子滤波法
引入模态坐标q,通过
式中:
将式(13)转化为状态空间模型并离散化:
式中:
当观测类别为速度和加速度时,C和D为
结构待重构位置的响应重构方程为
式中:
2. 冲击载荷识别
2.1. 传统正则化方法
2.1.1. Tikhonov正则化
载荷
式中:上标T表示共轭转置. 当
Tikhonov正则化方法可以描述为最优化问题:
式中:
从式(21)可以看出,正则化方法本质上是带有惩罚项或约束项的最小二乘方法[24]. 以载荷f为自变量对函数J求导,并令
式中:I为单位矩阵,
式中:
基于奇异值分解的正则化解可以表示为
Tikhonov正则化能否有效求解反问题的关键在于正则化参数
式中:trace为矩阵的迹,
2.1.2. L1正则化
为了充分考虑冲击载荷的稀疏性,建立L1正则化载荷识别模型[27]. 对于稀疏正则化,基于无约束凸优化的系统模型可以表示为
式中:
2.2. 修正-联合正则化方法
当外部载荷类型为冲击载荷时,采用L2正则化方法能够保证加载区域载荷识别的光滑度,但会出现非加载区域的识别振荡问题,且振荡较明显. L1正则化方法保留了解的稀疏特征,但识别结果的光滑度较差且易受噪声干扰,在噪声较大时甚至难以识别.
为了提高载荷识别的精度,提出新型的修正-联合(updating-combination)正则化方法,即Luc正则化,用以冲击载荷的识别. 该方法基于传统L2与L1正则化,具体的计算过程可以归纳为“修正-联合”的步骤,即修正步与联合步. 先引入小波变换阈值法[31]对测量数据进行降噪预处理,以获得降噪后的响应
式中:
式中:
差值载荷较小不需要考虑振荡问题,仅满足其光滑性即可,故采用L2正则化方法求解
式中:
式中:a为各时刻差值载荷之和;k为观测时刻,
载荷的具体识别情况如图1所示. 图中,实线为理论真实载荷,虚线为L2正则化识别载荷,分别有以下4种识别情况.
图 1
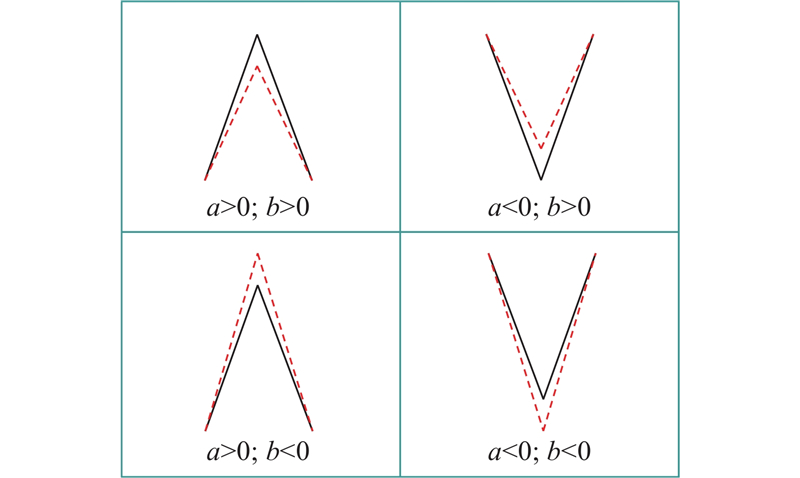
目前已完成载荷的修正步工作,可以满足冲击载荷峰值的识别,但是非加载区的载荷存在振荡情况,故引入载荷联合步. 在修正后载荷结果的基础上联合L1正则化方法,融入非加载区域识别稳定的优势,保留待重构载荷的稀疏特征. 采用式(33)、(34)求解最终的冲击载荷识别结果.
当冲击载荷方向为正,即
当冲击载荷方向为负,即
式中:
在联合步中,对L1正则化方法的载荷识别结果
具体来说,Luc正则化方法如下. 对传统L2正则化解进行修正,联合L1正则化解的稀疏性优势,使其能够在满足冲击载荷识别结果光滑度的基础上,提高冲击载荷的识别精度与鲁棒性,保证冲击载荷非加载区域识别结果趋于稳定.
3. 结构响应重构
基于修正-联合正则化方法的冲击载荷识别与结构响应重构方法的具体流程如图2所示. 在获得结构测量响应后,引入小波变换阈值法对测量响应进行降噪处理. 构建测量位置处的传递矩阵Hm及待重构位置处的传递矩阵Hr. 利用去噪后响应、传递矩阵及提出的Luc正则化方法,对结构外部的冲击载荷进行识别,具体的Luc正则化方法分为“载荷修正”与“载荷联合”2个步骤. 利用Luc冲击载荷识别结果,结合传递矩阵法与PF算法,分别对待重构位置处的动态响应进行计算,对比2种方法的重构效果.
图 2
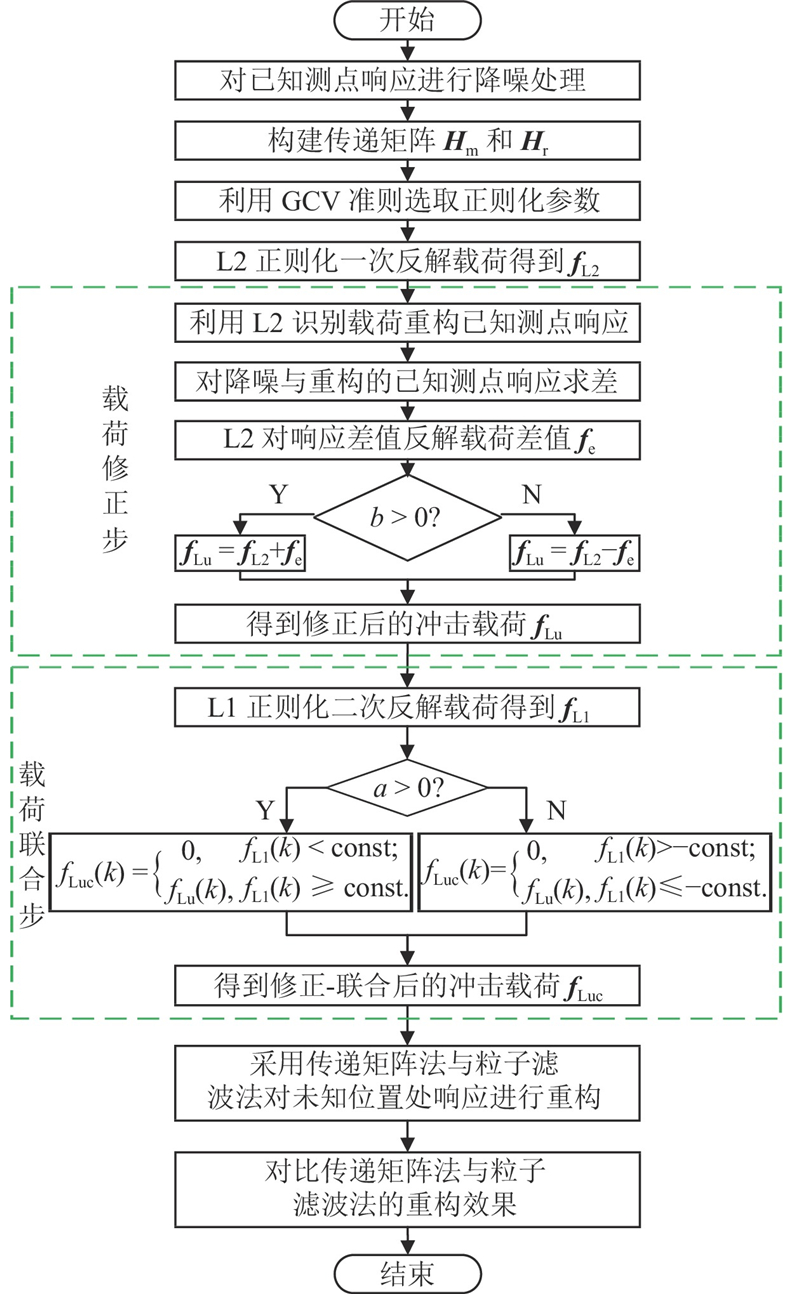
图 2 载荷识别与响应重构的流程图
Fig.2 Flow chart for load identification and response reconstruction
利用传递矩阵法计算待重构响应,可以表示为
式中:
利用PF算法计算待重构响应,可以表示为
式中:
评估载荷误差的指标为
式中:
评估响应误差的指标为
式中:
4. 算例分析
4.1. 数值算例
图 3
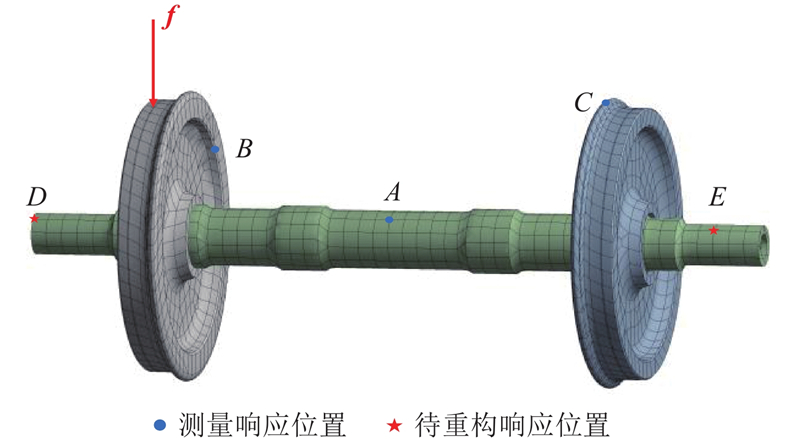
轴颈用来安装滚动轴承,承担车辆质量,并传递各个方向上的静、动载荷,轴颈的动态响应对轮对动力学分析十分重要. 利用A、B和C节点的垂向加速度响应来识别冲击载荷f,重构轴颈上D和E节点处的垂向速度vD和vE、D和E节点处的加速度响应aD、aE. 在结构动力学领域,各阶模态响应按响应因子来表征其重要性,各阶模态的响应因子1/(2k−1)2随着阶数k的增大而减少[33],模态阶数越低,响应因子越大,该阶模态对于结构动力学信息越重要. 通常情况下,低阶模态包含结构的主要信息,反映结构的动力学行为. 工程上一般仅关心低阶模态,且通常选择4~8阶模态作为感兴趣模态. 将该轮对划分为31 778个节点、11 596个单元,开展模态分析,获取前8阶的弹性模态频率分别为89.22、102.84、103.02、167.88、168.64、274.97、308.03和309.29 Hz. 在响应数据中添加噪声,以模拟真实测量响应,具体表示为
式中:
载荷识别问题是否适定,须引入Picard条件[34]进行判断,即随着奇异值个数i的增加,系数
图 4
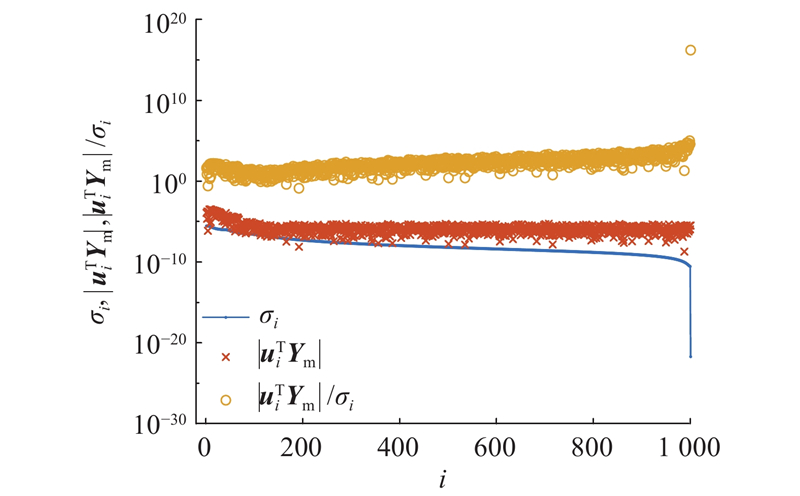
图 5
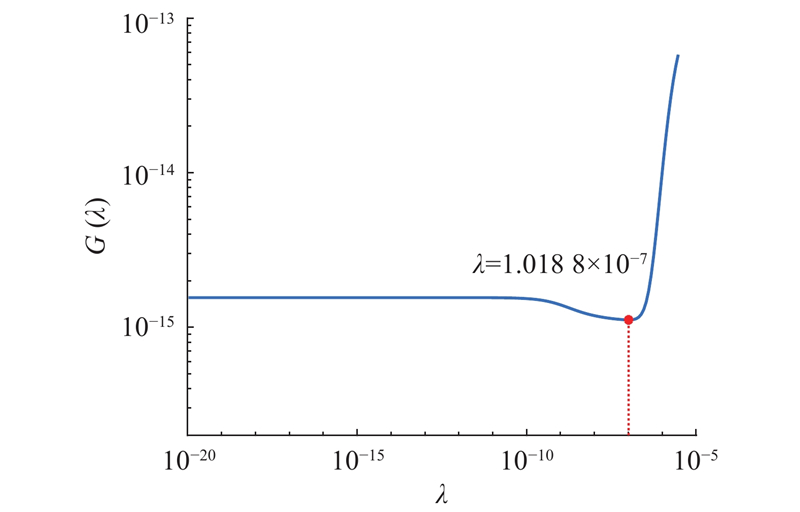
图 6
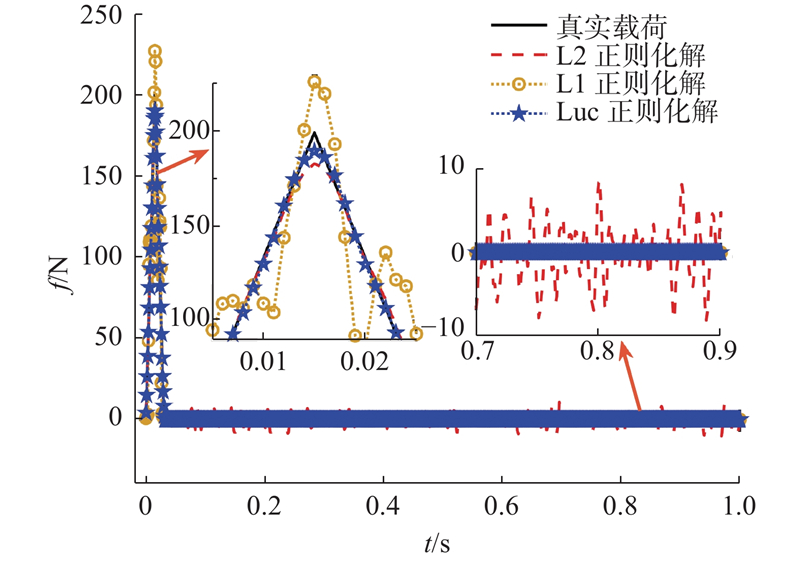
图 6 不同正则化方法下的冲击载荷识别结果
Fig.6 Impact load identification results by different regularization methods
为了验证所提Luc正则化方法的有效性,计算3种方法冲击载荷的识别误差,L2、L1和Luc正则化的误差分别为17.69%、23.42%和3.23%. Luc正则化的误差明显小于其他2种正则化方法,表明本文方法能够获得较好的冲击载荷识别结果. 探究不同噪声等级下冲击载荷的识别情况,分别加入噪声因子为0.03、0.05、0.10及0.30的测量噪声. 不同噪声等级下3种冲击载荷识别方法独立运行10次,计算误差均值的结果如表1所示. 经反复试验确定,当噪声因子为0.03、0.05、0.10时const取0.5,当噪声因子为0.30时const取2. 由表1可以看出,Luc正则化方法对冲击载荷的识别精度更高,在不同等级噪声的干扰下,Luc正则化均能表现出良好的识别精度,表明所提方法具有较强的鲁棒性.
表 1 不同噪声下的载荷识别误差
Tab.1
| 噪声因子 | RPEf | ||
| L2正则化 | L1正则化 | Luc正则化 | |
| 0.03 | 11.40 | 10.28 | 4.45 |
| 0.05 | 13.19 | 11.40 | 3.60 |
| 0.10 | 17.31 | 16.53 | 3.65 |
| 0.30 | 26.63 | 31.08 | 7.86 |
图 7
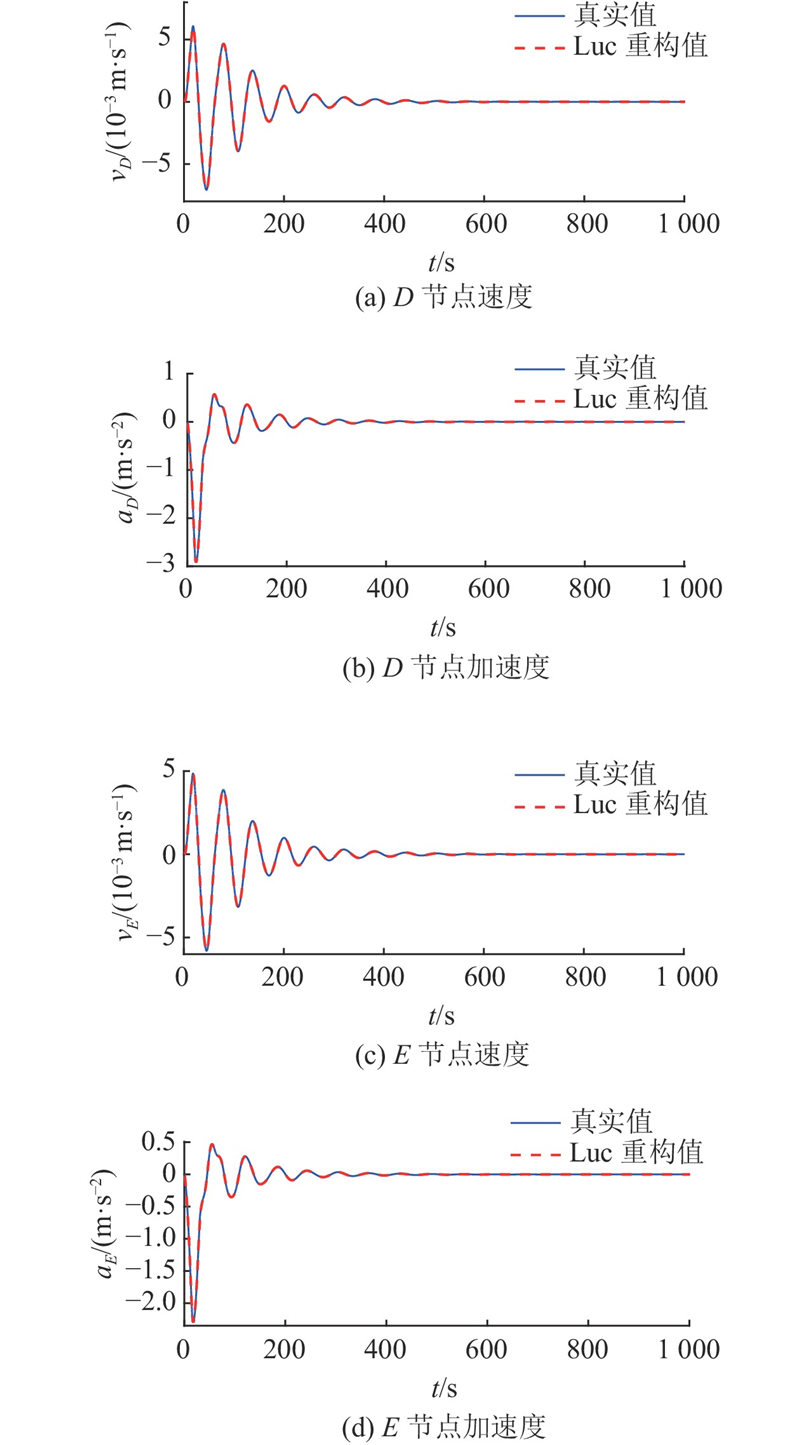
图 8

图 8 不同正则化方法的响应重构误差
Fig.8 Response reconstruction errors by different regularization methods
假设数值算例的模型准确,且加入的噪声为高斯白噪声,在重构过程中不考虑结构模型误差及有色噪声的影响. 基于粒子滤波法与传递矩阵法的重构误差如表2所示,误差均小于11%,而所提Luc正则化方法识别出的冲击载荷结果用于结构响应重构的误差明显小于其他2种正则化方法.
表 2 不同重构方法下的重构误差
Tab.2
| 重构方法 | 正则化方法 | RPEY | |||
| D节点 速度 | D节点 加速度 | E节点 速度 | E节点 加速度 | ||
| 传递 矩阵法 | L2 | 6.15 | 8.12 | 6.01 | 8.14 |
| L1 | 4.46 | 10.04 | 4.35 | 10.05 | |
| Luc | 0.90 | 1.44 | 0.88 | 1.44 | |
| 粒子 滤波法 | L2 | 6.15 | 8.12 | 6.01 | 8.13 |
| L1 | 4.47 | 10.04 | 4.35 | 10.05 | |
| Luc | 0.90 | 1.45 | 0.89 | 1.45 | |
4.2. 试验验证
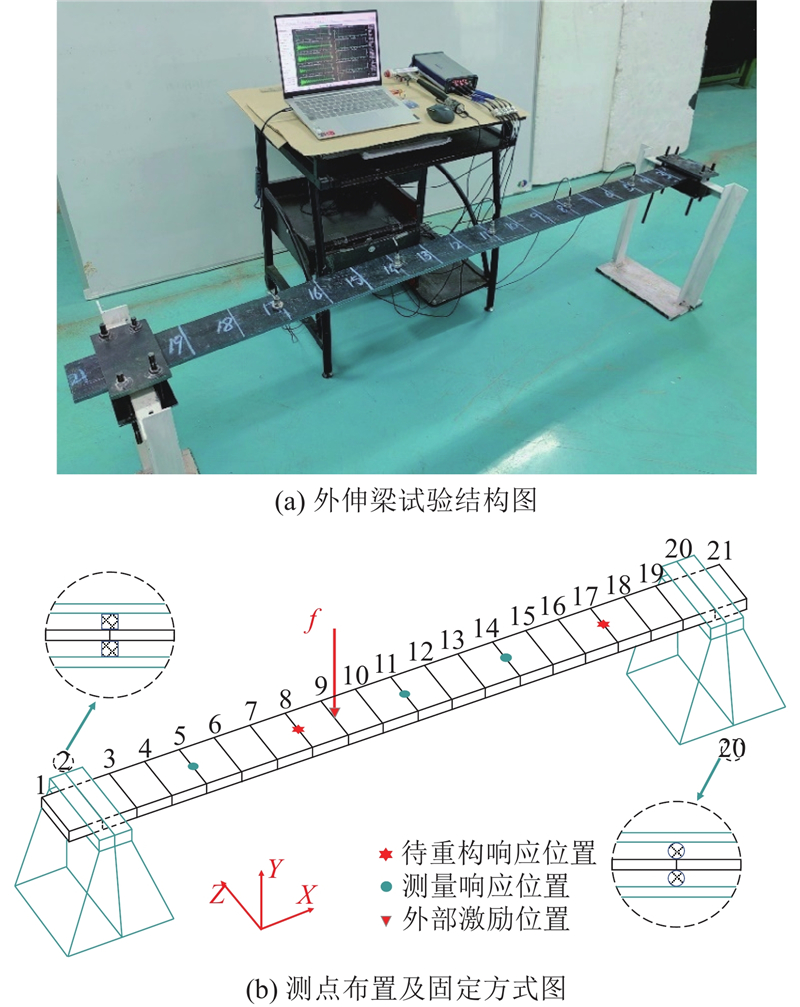
为了验证本文方法在工程实际中的可行性与适用性,根据结构力学,将数值算例中的高速列车轮对简化等效为两端都伸出支座的外伸梁. 搭建相应的外伸梁试验台,对所提方法进行试验验证. 外伸梁试验结构如图9(a)所示. 该外伸梁尺寸为2 000 mm×200 mm×10 mm,将其划分为20个单元、21个节点,只考虑Y方向的自由度,外伸梁第2节点为固定端,第20节点为简支端,具体的测点布置及固定方式如图9(b)所示. 在第9节点Y方向施加一锤击激励,测量第5、11和14节点的Y方向加速度信号,用于外部冲击载荷识别与第8、17节点Y方向加速度响应a8、a17的重构. 采集第8、17节点的Y方向加速度信号,与重构信号进行对比,验证所提方法的有效性.
图 9
测试系统框架如图10所示,试验测得该外伸梁结构的前4阶模态频率分别为7.82、28.12 、60.86 和106.13 Hz. 经反复试验,外伸梁算例中参数const取0.4.
图 10
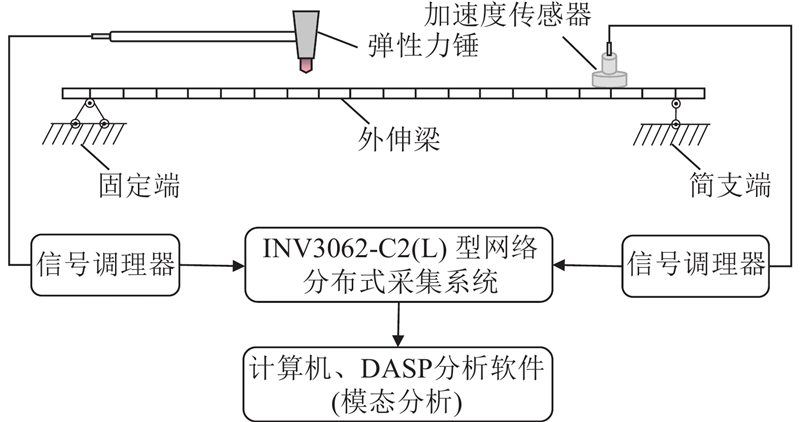
图 11
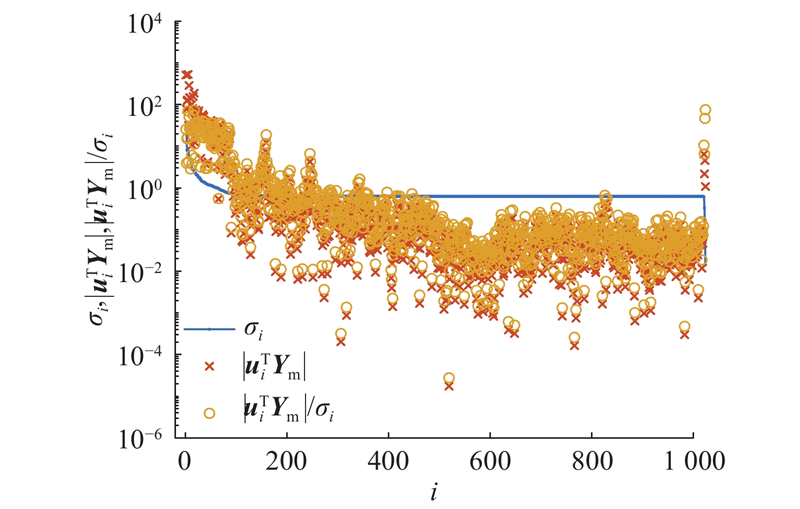
图 12

分别采用L2正则化、L1正则化及本文的Luc正则化方法对外部冲击载荷进行识别,如图13所示为冲击载荷识别结果. 可以看出,与L2和L1正则化方法相比,本文的Luc正则化方法无论是在载荷峰值位置还是非加载区域位置,均能较好地吻合实测载荷.
图 13
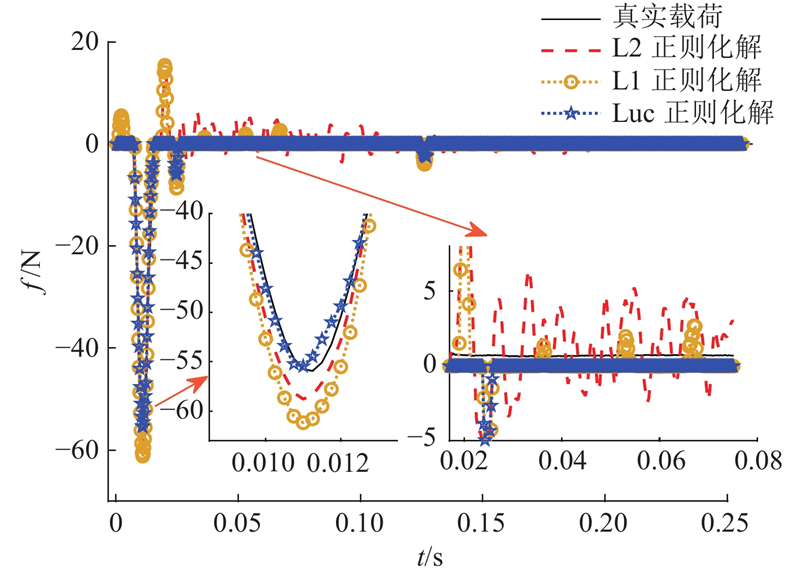
图 13 不同正则化方法下的冲击载荷识别结果
Fig.13 Impact load identification results by different regularization methods
为了验证所提Luc正则化方法的有效性,计算并对比利用3种方法进行冲击载荷识别的误差. L2正则化的误差为31.72%,L1正则化的误差为24.55%,Luc正则化的误差为13.11%. 本文的Luc正则化方法用于载荷识别的误差更小,表明该方法对于冲击载荷的识别精度较高. 利用Luc正则化方法识别的冲击载荷,结合传递矩阵法、粒子滤波法重构外伸梁第8和第17节点响应,与测量响应进行对比. 时程拟合曲线如图14所示. 图中,a8、a17分别为第8、17节点的垂向加速度. 从图14可以看出,利用传递矩阵法和粒子滤波法重构的响应均能与结构真实响应保持良好的一致性,说明利用这2种方法都能描述结构动态响应的时间历程.
图 14

为了对比传递矩阵与PF算法下3种正则化方法用于响应重构的效果,分别对外伸梁的第8、17节点的加速度进行重构,重构响应与测量响应的误差如表3所示.
表 3 不同正则化方法下的重构误差对比
Tab.3
| 重构方法 | 正则化方法 | RPEY | |
| 第8节点加速度 | 第17节点加速度 | ||
| 传递矩阵法 | L2 | 17.34 | 17.47 |
| L1 | 14.67 | 14.37 | |
| Luc | 17.59 | 11.72 | |
| 粒子滤波法 | L2 | 4.93 | 5.61 |
| L1 | 5.86 | 5.87 | |
| Luc | 17.39 | 8.02 | |
从表3可以看出,将Luc正则化引入基于传递矩阵的响应重构方法时,响应的重构精度较低. 原因是试验算例存在模型误差,即重构算法与试验系统采集算法间的机制差异,利用引入的PF算法,能够有效地降低结构模型误差及有色噪声的影响,较传递矩阵法具有更高的响应重构精度,但存在部分算法机制的差异. 在试验研究中有2种算法机制:一种是DASP软件内部的模态分析算法,用于获得结构的加速度响应;一种是结合模态试验与状态空间模型的算法,用于获得结构的理论加速度响应. 利用状态空间模型得到的加速度响应不能与实测加速度响应完全拟合,状态空间模型存在建模误差. 综上,模型误差与载荷识别精度共同影响最终的响应重构结果. 整体而言,存在模型误差时,采用Luc正则化与PF算法进行冲击载荷识别与结构响应重构,能够获得更高精度的冲击载荷识别结果与响应重构结果.
表 4 不考虑模型误差下不同正则化方法的重构误差对比
Tab.4
| 重构方法 | 正则化方法 | RPEY | |
| 第8节点加速度 | 第17节点加速度 | ||
| 传递矩阵法 | L2 | 14.93 | 17.89 |
| L1 | 12.43 | 15.15 | |
| Luc | 9.15 | 8.61 | |
5. 结 论
(1) 利用本文所提Luc正则化方法对Tikhonov正则化解进行修正,能够在满足载荷识别结果光滑的同时,提高冲击载荷峰值的识别精度. 引入L1正则化中一范数项的稀疏性优势,对修正解进行联合优化,保留了冲击载荷非加载区域的稀疏特征.
(2) 所提正则化方法在30%的噪声情况下,仍可以获得较好的冲击载荷识别结果,具有良好的抗噪性. 修正-联合正则化方法可以看作是2种传统正则化的推广和改进版本.
(3) 与传递矩阵法相比,粒子滤波算法能够考虑模型误差及算法间的不确定性,获得更高精度的重构响应.
参考文献
Dynamic response analysis of ship-bridge collisions experiment
[J].
基于冲击响应谱高速列车设备冲击环境特性分析
[J].
Analysis of shock environment characteristics of high-speed train equipment based on shock response spectrum
[J].
Structure health monitoring of a composite wing based on flight load and strain data using deep learning method
[J].DOI:10.1016/j.compstruct.2022.115305 [本文引用: 1]
Vibration feature extraction using signal processing techniques for structural health monitoring: a review
[J].DOI:10.1016/j.ymssp.2022.109175
机械结构健康监测综述
[J].DOI:10.3901/JME.2021.16.269 [本文引用: 1]
Mechanical structural health monitoring: a review
[J].DOI:10.3901/JME.2021.16.269 [本文引用: 1]
基于改进函数拟合法的冲击载荷识别研究
[J].DOI:10.3901/JME.2022.03.157 [本文引用: 1]
Research on impact force reconstruction based on improved function fitting method
[J].DOI:10.3901/JME.2022.03.157 [本文引用: 1]
Dynamic load identification for mechanical systems: a review
[J].DOI:10.1007/s11831-021-09594-7 [本文引用: 1]
Structural response reconstruction in physical coordinate from deficient measurements
[J].DOI:10.1016/j.engstruct.2020.110484
Structural dynamic response reconstruction with multi-type sensors, unknown input, and rank deficient feedthrough matrix
[J].DOI:10.1016/j.ymssp.2022.109935 [本文引用: 1]
A response reconstruction method based on empirical mode decomposition and modal synthesis method
[J].DOI:10.1016/j.ymssp.2022.109716 [本文引用: 1]
基于经验模态分解和模型缩聚的动力响应重构方法研究
[J].
Dynamic response reconstruction method based on empirical mode decomposition and model condensation
[J].
Structural response reconstruction based on empirical mode decomposition in time domain
[J].DOI:10.1016/j.ymssp.2011.12.010 [本文引用: 1]
On the generalisation of the transmissibility concept
[J].DOI:10.1006/mssp.1999.1268 [本文引用: 2]
Structural response reconstruction with transmissibility concept in frequency domain
[J].DOI:10.1016/j.ymssp.2010.10.001 [本文引用: 1]
未知输入下基于响应重构的结构损伤识别
[J].
Structural damage identification based on response reconstruction under unknown input
[J].
两种传感器的位置优化及结构多种响应重构
[J].
Location optimization of dual-type sensors for multi-kind structural response reconstruction
[J].
Adaptive mode selection integrating Kalman filter for dynamic response reconstruction
[J].DOI:10.1016/j.jsv.2021.116497 [本文引用: 1]
基于有限测量信息的两步响应重构方法
[J].
Two-step response reconstruction method based on limited measured information
[J].
基于正则化方法的雪龙号破冰船冰载荷反演的研究
[J].
Study on inversion of ice load for Xue Long icebreaker based on regularization method
[J].
机械结构冲击载荷稀疏识别方法研究
[J].DOI:10.3901/JME.2019.03.081 [本文引用: 1]
Sparse identification of impact force acting on mechanical structures
[J].DOI:10.3901/JME.2019.03.081 [本文引用: 1]
Structural response reconstruction based on the information fusion of multi-source particle filters
[J].DOI:10.1007/s12206-023-0108-3 [本文引用: 2]
一种基于新的正则化技术的冲击载荷识别法
[J].
Impact force identification based on improved regularization technique
[J].
基于Green函数和正则化的动态载荷识别方法
[J].
Applications of regulation method in dynamic load identification
[J].
A state space force identification method based on Markov parameters precise computation and regularization technique
[J].DOI:10.1016/j.jsv.2010.02.012 [本文引用: 1]
A novel strategy for response and force reconstruction under impact excitation
[J].DOI:10.1007/s12206-018-0709-4 [本文引用: 3]
Gradient projection for sparse reconstruction: application to compressed sensing and other inverse problems
[J].DOI:10.1109/JSTSP.2007.910281 [本文引用: 1]
Sparse solution of underdetermined systems of linear equations by stagewise orthogonal matching pursuit
[J].DOI:10.1109/TIT.2011.2173241 [本文引用: 1]
An iterative thresholding algorithm for linear inverse problems with a sparsity constrains
[J].DOI:10.1002/cpa.20042 [本文引用: 1]
基于EEMD-小波阈值去噪的桥梁结构模态参数识别
[J].
Modal parameter identification of bridge structures based on EEMD-wavelet threshold denoising
[J].
轨道车辆轮对的关键力学问题及研究进展
[J].
Key solid mechanics issues and research progresses for railway vehicle wheelset
[J].
The discrete Picard condition for discrete ill-posed problems
[J].DOI:10.1007/BF01933214 [本文引用: 2]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}