

国内外学者对车队行为进行大量的研究,构建车队行为模型是其中一项重要的研究手段. Jiang等[6]考虑到车辆之间的通信会同步改变驾驶行为,提出考虑网联自动驾驶车队行为的元胞自动机模型,建立该模型的加、减速和随机化规则. Tian等[7]将鱼类的运动模式应用到车队中,建立具有现实约束条件的车辆群体行为模型,论证了该模型在实际应用中的可行性. Wang等[8]考虑网络攻击对车队运动的影响,构建协同智能驱动的车队行为模型. 该模型集成了动态通信拓扑结构,能够分析操纵信息对车队动力学的影响. Li等[9]针对混合交通环境下货车车队的解耦问题,提出车队合作变道行为模型,通过数值模拟实验验证了模型的有效性.
随着车联网技术的不断发展,利用控制手段及策略对施工区的车辆运行轨迹及队列状态进行优化,是提升该区域通行效率的一个有益尝试. Jiang等[10]提出考虑自动驾驶车队规模和网联车辆渗透率的车道管理模型,分析模型参数的敏感性,研究交通容量与车道管理之间的关系,为混合交通流情形下的车队运用提供了支撑. Han等[11]在现有研究的基础上,提出基于层次结构的多车道队列排队算法,验证了该算法在应对同车道队列博弈、多车道合并场景下的有效性. Liu等[12]在多车道高速公路上对协同自适应巡航控制车队的跟驰和换道行为进行建模,捕获仿真网络中的理想交通状态. Cao等[13]提出施工区车队协同控制策略,该策略通过充分利用上游空间资源,提高施工区的通行能力.
考虑到实车试验的成本及风险,现有研究多基于仿真手段,探究车辆以车队形式行驶在高速公路施工区场景下的应用潜力. Haque等[14]利用现场数据搭建微观仿真模型,研究不同施工区类型及交通条件对重型工程车车队运行状况的影响. Mahbub等[15]研究混合交通车队生成控制框架,通过直接控制网联自动驾驶车辆来确保队列的形成. 借助仿真手段评估该框架的性能,开展灵敏度和鲁棒性分析. Yao等[16]提出基于车队大小概率分布的混合交通流通行能力模型和稳定条件,通过数值仿真研究最大队列规模对混合交通流通行能力、稳定性、安全性、油耗和排放的影响. Li等[17]综述了车联网环境下车队行为仿真的研究与应用现状,讨论了车联网仿真测试的未来发展方向与趋势,为今后车队行为仿真的相关研究及应用提供了思路与参考.
随着合作式自动驾驶技术的不断发展,车辆编队行驶成为车联网环境下车辆运行的新常态. 高速公路作为车队潜在的重要应用场景,目前的研究尚不充分,有待深入探讨. 基于此,本文聚焦高速公路施工区场景,从车队被动换道行为协同优化的角度出发,构建车队行为模型. 基于Plexe-SUMO搭建联合仿真平台,设计相应车队的生成及换道选择算法,对车队运行状况及规模进行评价优化,以减少施工区的车速波动,提升路段的整体通行效率.
1. 换道行为建模
1.1. 高速公路车队换道行为建模
为了有序完成驾驶任务,车队通常依据自身驾驶目的及需求在相应位置完成换道行为. 如图1所示,t时刻车队自左向右行驶,车队n位于车道3(最外侧车道),拟由当前车道向车道2(中间车道)换道. 该时刻车队n目标车道的前方车队为n+1,后方车队为n−1. 用i表示车队编号(i = n−1,n,n+1). 由于车辆间能够进行实时动态信息交互,可以认为车队内部的车辆运动状态趋于一致,即当换道行为发生时,车队内各车辆在一定的时间间隔内先后拥有相同的运动参数. 设t时刻车队所处位置为xi (t),速度为vi (t),最大减速度为ai,计算时间步长为T.
图 1
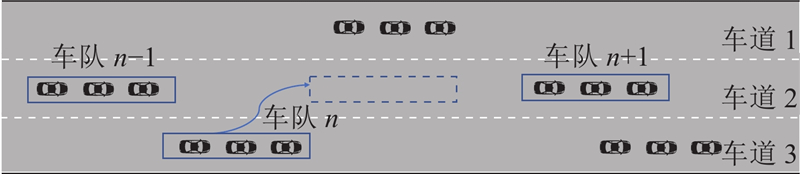
利用车队n及车队n−1的减速度,判断换道是否安全[18]. 对于车队n,当其于t时刻换道后,将以车队n+1为前导车队进行跟驰行驶. 为了保证不与车队n+1发生碰撞,t+T时刻车队n的速度不能超过最大安全速度
式中:ln+1为车队n+1的长度,
对于车队n−1,车队n在完成换道后成为前导车,车队n−1的跟驰规则及安全判断条件与车队n类似,最大安全速度
式中:ln为车队n的长度,
综合考虑换道后车队n及车队n−1的行驶状况,当
1.2. 施工区场景下的车队换道行为分析
考虑如图2所示的施工区场景. 高速公路车道3的某一位置正处于施工封闭状态,短时间内后续车队须换道至其余车道行驶. 若当前时刻车队n行驶至距离施工区的距离为dn,work-zone,此时车队n与车队n+1之间的距离为dn,n+1,车队n与车队n−1之间的距离为dn,n−1. 为了使车队n顺利驶入中间车道,须满足如下条件:
图 2
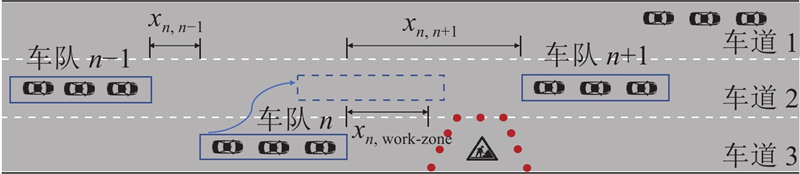
图 2 施工影响区车队被动换道行为的示意图
Fig.2 Diagram of platoon passive lane-changing behavior in work zone
式中:dmin为车队n换道所需的最小距离,其大小与车队容量密切相关;Lsafe为车队安全跟车距离. 施工区场景下的车队换道绕行行为是“被迫”发生的. 在车联网环境下,车队n在产生换道需求时会向车队n−1及车队n+1发送换道信息,计算换道条件. 当车队n−1与车队n+1距离较近,不满足车队n的换道要求时,车队n−1与车队n+1将改变自身速度,调整各自与车队n间的距离,为车队n提供有利的换道条件.
2. 场景搭建与参数设定
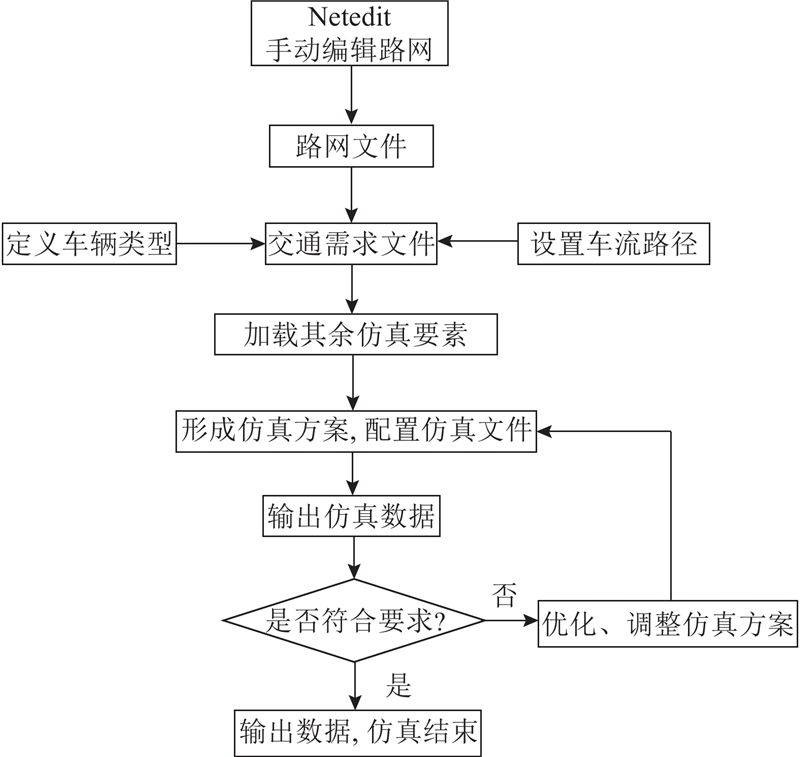
2.1. 仿真场景搭建
为了增加场景真实度及流量设置的合理性,基于实际道路场景,利用SUMO软件进行仿真建模. 选取南京市某高速公路施工路段上、下游6 km为研究对象,利用2022年3月7日(周二)早高峰(8:00—9:00)、平峰(14:00—15:00)、晚高峰(17:00—18:00)3个时段对目标路段进行调研. 采用人工与视频录像相结合的方式进行数据采集,获取包括目标路段几何参数、流量、车型比例等信息.
根据实地调研结果,该目标路段共有3条通行车道,车道宽度为3.75 m. 施工区位于最外侧第3车道,长度约为150 m. 施工区域车道封闭,车辆须换道行驶. 根据调研获取的道路几何、车道宽度信息,利用Netedit搭建高速公路施工路段仿真模型. 根据路段实际的车流运行状况,数据采集过程中将路段车流分为小型客车与大型客/货车2种类型. 基于调研获取的车流数据,对各车型车辆进行折算(小型客车的折算系数为1,大型客车的折算系数为2,大型货车的折算系数为3). 结果表明,单车道小时流量为500~900辆.
2.2. 车队行为生成与仿真参数设定
利用Plexe-SUMO进行车队行为的生成与仿真. 为了保证施工区上游各车道车流相对均衡及车队运行整体安全有序,对车道选择函数进行相应设计. 具体的车队生成及车道选择算法如算法1所示.
算法1 车队行为生成及车道选择 输入:车道:L = {L1, L2, L3, ···, Lm} 所有车道中可发车的车道:L_gen = {L_gen1, L_gen2, ···, L_geng} 可发车车道车辆类型:C = {C1, C2, C3,···, Cg} 可发车车道车队规模:S = {S1, S2, S3,···, Sg} 可发车车道车流量:B = {B1, B2, B3, ···, Bg} 时间:D 函数:产生车队:Generate_Platoon(L, C, S) 随机函数:Random(Set()) 过程: 1:A ← {} 2:Last = {Last1, Last2,···,Lastg} ← 可发车车道上次发车时间 3:T = {3600/(Bi/Si) for i in {1,2,···,g}} ← 发车间隔 4:换道函数:ChangeLane(A, L) 5:d ← 当前时间 6:while d <= D 7: for L_geni in L_gen 8: Blank_Time = d − Lasti 9: while Blank_Time == Ti 10: p ← Generate_Platoon(L_geni, Ci, Si) 11: A ← A ∪ {p} 12: Lasti = d 13: for Aj in A 14: if Aj到达换道区域 15: Lc ← L中Aj可换道车道 16: Lj = Random (Lc) 17: ChangeLine (Aj, Lj) 18: else if Aj驶出所有车道 19: A ← A −{Aj} 20: d += 1
为了聚焦研究对象,提升仿真效率,在不影响研究开展的前提下,对本文的仿真场景作出如下设定.
1)考虑高速公路车流组成实际及车联网技术的应用现状与发展趋势,仿真仅考虑小型汽车这一种车辆类型.
2)默认车联网环境下各车均能够完美通信,不考虑通信延迟、信息丢包的情况.
表 1 现状及车队行为仿真的主要参数设定
Tab.1
| 参数 | 数值 | |
| 现状情形 | 车队情形 | |
| 跟驰模型 | Krauss | ACC |
| 换道模型 | SL2015 | - |
| 车身长度/m | 5 | 5 |
| 车辆最大速度/(m·s−1) | 16.6 | 16.6 |
| 速度偏差系数 | 0.1 | 0 |
| 车辆加速度/(m·s−2) | 3 | 4 |
| 车辆减速度/(m·s−2) | 3 | 4 |
| 紧急情况下车辆 最大减速度/(m·s−2) | 8 | 9 |
| 期望车头时距/s | 1.5 | 1 |
| 驾驶不完美系数 | 0.5 | 0 |
| 静止时车间最小间距/m | 2 | 0.5 |
图 3
3. 仿真与结果分析
考虑不同流量输入的情形,将单车道小时流量依次设置为300~1 300辆(分别为300、500、700、900、1100、1300 辆/h). 分别进行传统道路条件及不同队列规模的网联情形下的仿真,车队规模依次设置为2~9辆. 仿真时长为3 600 s,如图4所示为队列规模为4辆的车队仿真运行效果.
图 4

为了量化高速公路施工区域车辆以不同队列规模行驶的效果差异,在施工区邻近车道设置长度约为200 m的E2检测器. 以平均速度
对不同流量状态下的各指标现状输出结果进行分析,绘制如图5所示的色阶图. 图中,
图 5

图 5 不同流量状态下各指标输出结果的色阶图
Fig.5 Color scale diagram of output results of each indicator under different volume conditions
为了探究不同流量及队列规模组合下施工区域指标的输出差异,以延误指标为例,绘制如图6所示的变化曲面. 图中,
图 6
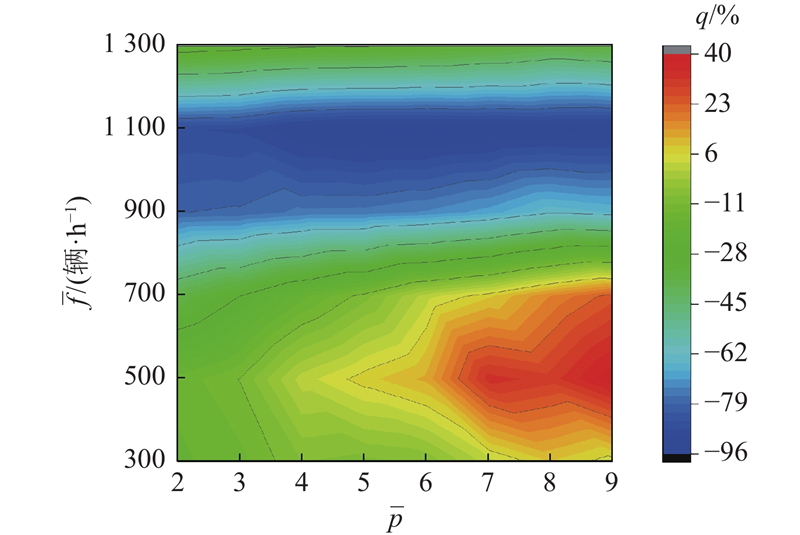
图 6 不同流量及队列规模条件下的延误指标变化
Fig.6 Delay indicator variation under different volume and platoon size conditions
从图6可以看出,在中、低流量(小于900 辆/h)状态下,当车辆以队列规模较小的车队形式行驶通过施工区域时,延误较现状有不同程度的降低. 若该流量状态下车辆以较高队列规模(大于6辆)行驶,则延误较现状有所提升. 当单车道流量为900或1 100 辆/h时,车辆以2~9队列规模的车队形式行驶时延误较现状均有较大幅度的降低. 随着流量的进一步增加,施工区域延误的提升幅度明显下降.
图6的整体趋势表明,在高速公路施工区域,中、低流量状态下车辆以较小规模的队列形式行驶较合适. 随着路段流量的增多,尤其是在高流量状态下,车队规模与延误变化不存在显著关联. 考虑到车队内部车辆的跟驰间距远小于车队间车辆的距离,在高流量状态下,当车辆组成规模较大的队列行驶时,更能够提升施工区域的通行效率.
利用仿真数据寻求施工区域在不同流量状态下的理想队列规模,计算该流量与队列规模组合下各指标较现状的变化比例,结果如表2所示.
表 2 施工区不同流量状态下各队列规模指标相对现状的变化比例汇总
Tab.2
| 指标相对变化比例/% | ||||
| 300 | 2 | 8.71 | −18.25 | −6.02 |
| 500 | 2 | 3.59 | −13.82 | −4.47 |
| 700 | 2 | 6.03 | −39.40 | −3.91 |
| 900 | 2 | 24.55 | −80.36 | −87.04 |
| 1100 | 6 | 291.19 | −93.71 | −91.52 |
| 1300 | 8 | 73.26 | −34.10 | −42.65 |
从表2可以看出,当单车道流量小于1 100 辆/h时,理想的队列规模均为2辆. 当流量较大时,理想队列规模为6~8辆.
观察各指标较现状变化的比例可知,在不同的流量情形与对应的理想队列规模下,施工区域平均车速有不同幅度的提升,平均延误及排队长度能够有效降低. 这表明在车联网环境下的施工区域,后续车辆能够提前感知并产生换道命令,实现队列的协同换道行驶,最大限度地减少扰动,提高施工区域的整体通行效率. 当单车道流量较大(1 100 辆/h)时,车辆按理想的队列规模以车队形式行驶,通行效率的提升效果较明显. 随着流量的进一步增加,施工区域延误的降低幅度受到一定的限制,平均速度的提升幅度及排队长度的降低幅度均有一定程度的降低.
选择碰撞次数指标,从安全性角度进一步验证了高流量状态下车辆以较大规模车队形式行驶的可行性. 对单车道小时流量为1 100辆及1 300辆2种情形进行仿真. 输出结果表明,在理想队列规模的情形下,车辆发生碰撞的次数均为0. 这表明在高流量状态下,车辆按理想的较大队列规模行驶时,可以在保证安全通行的前提下提高通行效率.
4. 结 论
(1)构建高速公路车队换道行为模型,分析施工区场景下的车队被动换道行为. 借助SUMO软件搭建仿真平台,探究不同流量状态下各车队规模对施工区通行效率提升的影响,寻求较理想的车队组织形式.
(2)仿真结果表明,中、低流量(小于900 辆/h)状态下车辆以较小规模(小于4辆)的队列形式行驶较合适. 随着路段流量的增多,尤其是在高流量状态下,车辆组成规模较大的队列(大于6辆),更能够提升事件区域通行的效率. 当单车道流量小于1100 辆/h时,理想队列规模均为2辆. 当流量较大时,理想队列规模为6~8辆.
(3)考虑到实车试验的成本及风险,主要借助虚拟仿真方式研究高速公路施工区车队被动换道的行为. 后续应进一步细化仿真模型的影响要素,考虑车间的通信延迟、信息丢包情况,使其更符合实际运行特性,加快车联网技术落地应用的步伐.
参考文献
高速公路施工区合流路段交通冲突模型
[J].
Traffic conflict model for confluence section in highway construction area
[J].
混有智能网联车队的交通流基本图模型分析
[J].
Analysis on fundamental diagram model for mixed traffic flow with connected vehicle platoons
[J].
Merging control strategies of connected and autonomous vehicles at freeway on-ramps: a comprehensive review
[J].
车路协同环境下车辆群体协同决策研究综述
[J].DOI:10.19818/j.cnki.1671-1637.2022.03.001
Research review on cooperative decision-making for vehicle swarms in vehicle infrastructure cooperative environment
[J].DOI:10.19818/j.cnki.1671-1637.2022.03.001
网联环境下高速公路辅助驾驶车辆编队评估
[J].DOI:10.19721/j.cnki.1001-7372.2019.12.007 [本文引用: 1]
Evaluation of assisted driving platooning on expressway in connected vehicle environment
[J].DOI:10.19721/j.cnki.1001-7372.2019.12.007 [本文引用: 1]
A cellular automata model for mixed traffic flow considering the driving behavior of connected automated vehicle platoons
[J].DOI:10.1016/j.physa.2021.126262 [本文引用: 1]
Modeling and analyzing cyberattack effects on connected automated vehicular platoons
[J].
A cooperative energy efficient truck platoon lane-changing model preventing platoon decoupling in a mixed traffic environment
[J].
A mixed capacity analysis and lane management model considering platoon size and intensity of CAVs
[J].
Strategic and tactical decision-making for cooperative vehicle platooning with organized behavior on multi-lane highways
[J].
Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities
[J].
A platoon regulation algorithm to improve the traffic performance of highway work zones
[J].DOI:10.1111/mice.12691 [本文引用: 1]
Impact of platooning connected and automated heavy vehicles on interstate freeway work zone operations
[J].
Analysis of the impact of maximum platoon size of CAVs on mixed traffic flow: An analytical and simulation method
[J].
A survey of vehicle group behaviors simulation under a connected vehicle environment
[J].DOI:10.1016/j.physa.2022.127816 [本文引用: 1]
A behavioural car-following model for computer simulation
[J].DOI:10.1016/0191-2615(81)90037-0 [本文引用: 1]
Formation control with lane preference for connected and automated vehicles in multi-lane scenarios
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}