

停车是车辆行程的重要组成部分,根据统计[1]可知,车辆的真实使用时间仅占总时间的5%,剩余95%的时间都在停车. 随着我国经济水平的提升以及小汽车数量的高速增长,停车问题日益成为城市发展不可忽视的主要交通问题之一. Barone等[2]的研究显示,停车及停车巡游行为会增加25%~40%的交通量,而在停车需求较大的区域,出行者往往需要花费10 min以上的时间以搜寻可用停车位[3],而最终的停车位可能远离出行者的目的地. 这一过程不仅会降低出行者的出行体验,而且增加了社会运行成本. 停车问题的根本原因是车辆对停车位的需求大于停车位的供给,这不仅表现在城市停车位总量不足,还表现在停车供需时空不平衡. 由于城市土地稀缺,通过增大供给解决停车供需矛盾困难重重,在此背景下,停车系统通过一定的策略合理配置停车资源是缓解停车矛盾的可行途径.
现有的停车资源配置策略一般以有人驾驶车辆为研究对象,随着通信技术、感知技术及高性能计算设备等的进步,自动驾驶技术高速发展,自动驾驶车辆将步入现实,未来的停车系统将面对有人驾驶车辆(human-driven vehicle, HDV)和自动驾驶车辆(autonomous vehicle, AV)共存的交通场景,这对缓解停车矛盾既是挑战,也是机遇.
本文以HDV与AV共存停车系统为研究对象,系统在对所有车辆收取停车费用外,可以另向HDV收取一定的调度费用. 借助AV可自动驾驶的能力,在多个停车场组成的停车系统内部调度AV为HDV创造可用停车位,达到提高停车系统收益、降低社会成本的综合目标.
1. 相关工作
高水平的自动驾驶技术有望改变车辆的停车模式. 出行者不需要先完成停车再前往其目的地,相反,出行者可以在目的地下车,然后令AV自行前往指定停车场完成停车. 如图1所示,与HDV出行者相比,AV出行者可在其目的地下车,无须步行.
图 1
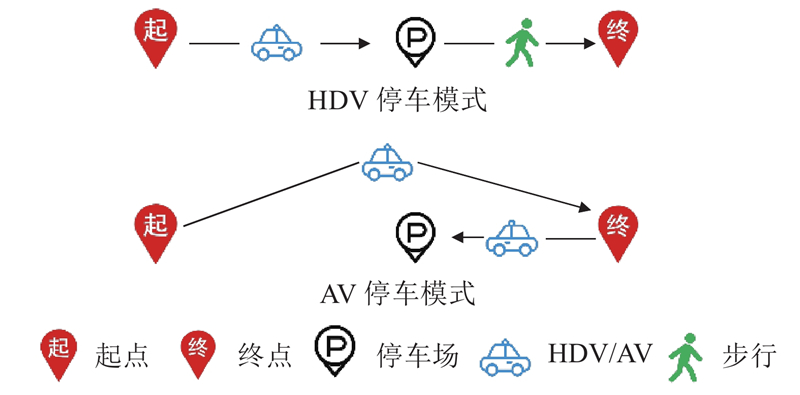
图 1 有人驾驶车辆与自动驾驶车辆出行者的停车模式示意图
Fig.1 Parking patterns of human-driven and autonomous vehicle users
对于AV的停车管理而言,许多面向HDV的停车策略可以应用到AV. Liu[7]以AV通勤者为研究对象进行交通网络均衡建模,以系统最优为目标,开发了时变的最优拥堵收费方案. Wang等[8]在区域内存在多个停车场的情况下,建立AV连续时间随机动态模型,该模型通过动态调整各停车场的停车价格优化AV的停车管理. Radvand等[9]构建常微分方程组来模拟AV的停车选择,研究AV通过巡游以替代停车这一行为对交通拥堵的影响,利用所提出的模型,Radvand等[9]基于时间进行动态收费和停车供应,以优化系统性能. Bahrami等[10]基于agent建立AV停车仿真模型,在该模型中,AV可以不停车,而以巡游的方式等待出行者,这一行为将增加车辆能源消耗以及加剧交通网络拥堵,因此,研究建议向没有搭载出行者的空载车辆收取通行费用. Millard-Ball[11]基于agent模拟AV交通系统,该研究提出AV拥堵收费方案,费用包含2个部分:一是基于时间计量的AV占用公共路权的费用,二是基于行驶距离计量的费用. 与文献[10]不同的是,文献[11]研究的收费对象包含非空载的AV. 为了减少AV可能增加的行驶里程,Yan等[12]提出在必要的时间内转移一些车道,为AV提供路边停车位,北京市望京区的数值实验表明,适当的随时间变化的路边停车规划可以将AV总行驶里程降低10%~27%. Sayarshad[13]考虑土地使用和AV出行成本,为AV日常停车确定了停车位的最佳租金投标,基于曼哈顿核心区的算例表明,在该策略下,停车价格下降了34%,平均空载行程减少了22%. Xie等[14]将共享停车思想引入AV停车管理,构建用于AV的共享停车分配和引导优化框架,该框架周期性地优化多个候选相邻停车场的匹配,通过考虑时变链路行程时间的全局停车路径算法进行车辆的路线选择.
在这些传统的基于收费的停车管理策略外,车辆调度受到了研究者的关注. 车辆调度不完全依赖于自动驾驶技术,如Ramezani等[15]基于宏观基本图(macroscopic fundamental diagram, MFD)优化城市出租车调度系统,解决了城市拥堵问题. 与出租车相比,AV的自动行驶能力使得调度效率更高. Khalid等[16]设计在全自动驾驶环境下的停车调度系统,该系统将为出行者选择下车点,综合停车价格、行驶能耗及到停车场的距离,为AV提供最优停车场并进行调度. Zhao等[17-18]考虑到AV在交通网络上的不均匀分布将加剧交通拥堵以及HDV和AV的停车竞争,因此设计集中调度停车系统. 该系统基于模型预测控制(model predictive control, MPC)在区域间直接调度AV以缓解停车竞争,数值实验表明,利用该调度系统可以有效地减少HDV停车巡游,但AV的行驶时间总高于HDV,且未得到相应的补偿.
2. 基于智能体的停车模型
基于agent的建模是模拟复杂系统(如交通系统)的有力工具. 在停车系统中,agent可以用于代表车辆、行人、停车场、路段等不同实体. 基于agent的模型用于停车系统的优点是能够捕捉真实世界系统的异质性和复杂性. 通过模拟单个agent的行为,研究者可以更好地了解系统中微观个体的运行方式,研究分析不同的停车管理策略会如何影响系统性能. 为了更好地刻画HDV和AV以及评估基于AV调度的收费策略,建立基于agent的停车模型.
图 2
式中:
图 3
式中:
3. 基于自动驾驶车辆调度的收费策略
3.1. 自动驾驶车辆调度策略的设计与调度方案规划
从HDV和AV停车选择成本来看,AV对目的地与停车场间距离的敏感性较低. 当某停车场无空余泊位时,停车调度系统可以借助AV可自动驾驶能力,将AV调至系统内的其余停车场,为HDV创造可用停车位,使得HDV可以更方便地完成停车,从而提升停车系统的运行效率. 为了简化起见,给出如下假设.
1)研究涉及的停车场均归属于同一停车系统.
2)停车系统中的AV在获得补偿的前提下均接受系统调度,且仅考虑停车场间的调度,不考虑目的地到停车场途中的调度.
3)不考虑车辆损坏、道路拥堵此类导致车辆无法调度的情况.
4)不考虑调度过程中AV停车结束的情况.
5)停车系统中各停车场的停车收费标准一致.
停车调度系统的运营流程如图4所示. 当停车场无空余泊位但存在可调度AV时,停车系统向外界释放可停车信息及相应需要收取的调度费用. 在HDV到达该停车场后,若有空余泊位,则HDV直接完成停车;若无空余泊位,但存在可调度AV,则停车系统规划形成调度方案. 在HDV出行者接受并支付相应费用后,AV被调离,HDV完成停车;否则,HDV重新进入路网,选择其他停车场进行停车.
图 4

停车调度系统向HDV收取的调度费用包含以下2个部分. 1)调度AV的硬性成本,该部分支付给被调度AV,以覆盖调度增加的停车成本,假设系统内各停车场收费一致,则该部分仅与AV额外行驶里程相关. 2)提供调度服务收取的服务费,服务费可以因停车场的不同而有所差异,如热门停车场可以将服务费设置高于冷门停车场,但在本研究的系统运营过程中各停车场的服务费不会随时间动态变化. 差异化的服务费不仅有助于增加停车系统的营收,而且能够将停车位提供给更需要的客户,有望提升系统效率.
调度成本取决于被调度AV的额外行驶里程,计算式如下:
式中:
图 5

表 1 自动驾驶车辆调度方案的成本对比表
Tab.1
| 方案1 | 方案2 | |||||||||||||||
| AV | 原停车场 | 新停车场 | | | | | 总成本 | AV | 原停车场 | 新停车场 | | | | | 总成本 | |
| AV1 | P1 | P3 | 6 | 5 | 1 | 10 | 10 | AV1,AV2 | P1,P2 | P2,P3 | 3,3 | 2,2 | 1,1 | 4,4 | 8 | |
通过建立0-1型整数线性规划模型规划多辆AV协同调度方案,模型的目标函数为
式中:
式(5)表示调度到某停车场的AV数量不超过该停车场可用泊位的数量,其中
3.2. 自动驾驶车辆的调度收费优化
停车调度系统除了收取与调度成本相当的费用外,还收取服务费,调度费用可以表示为
式中:
图 6
式中:
式中:
4. 应用示例及分析
4.1. 应用算例
基于杭州武林商圈构建路网,分析评价基于AV调度的停车系统收费策略. 武林商圈区位图如图7所示.
图 7
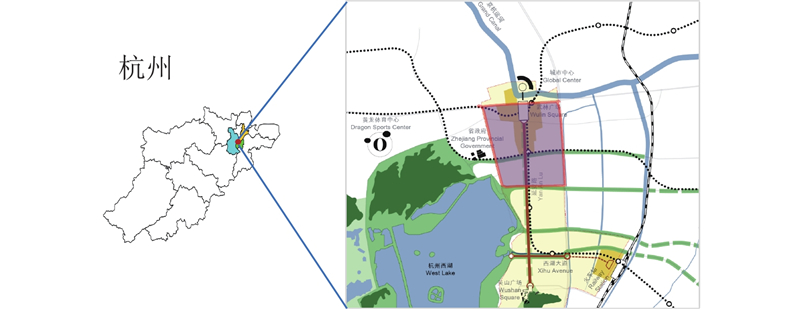
图 8

式中:
出行者的出行分布如表2所示,出行者数量总共为2 600. 仿真起始时刻为0 s,各OD出行者在时段[0, 5400] s中均匀分布.
表 2 出行分布表
Tab.2
| 进入点 | 目的地 | |||
| 1 | 2 | 3 | 4 | |
| 1 | 150 | 250 | 150 | 150 |
| 2 | 100 | 250 | 150 | 100 |
| 3 | 150 | 250 | 200 | 100 |
| 4 | 150 | 250 | 100 | 100 |
表 3 基于agent模型的参数取值表
Tab.3
| 参数 | 参数值 | 说明 |
| | 1 | 行驶时间权重系数 |
| | 1 | 停车费用权重系数 |
| | 2 | AV行驶能耗权重系数 |
| | 3 | 步行时间权重系数 |
| | 27.5元/h | 时间价值系数 |
| | 0.8元/km | 单位距离能耗 |
| | 45 km/h | 路段自由流速度 |
| | 16.1 km/h | 路段最小速度 |
| | 186 veh/km | 路段临界密度 |
| | 18.6 veh/km | 路段阻塞密度 |
| | 1.25 | 交通流速度相关系数 |
4.2. 基于自动驾驶车辆调度的收费策略评价
对基于自动驾驶车辆调度的差异化收费策略进行评价,并与常规策略、基于自动驾驶车辆调度的统一收费策略进行比较分析.
1)常规策略,即不实行AV调度.
2)基于自动驾驶车辆调度的统一收费策略,实行AV调度,区域内各停车场的调度服务费一致.
3)基于自动驾驶车辆调度的差异化收费策略,实行AV调度,对区域内各停车场的调度服务实行差异化收费.
通过综合指标对策略效果进行评价,计算公式如式(10)~(12)所示.
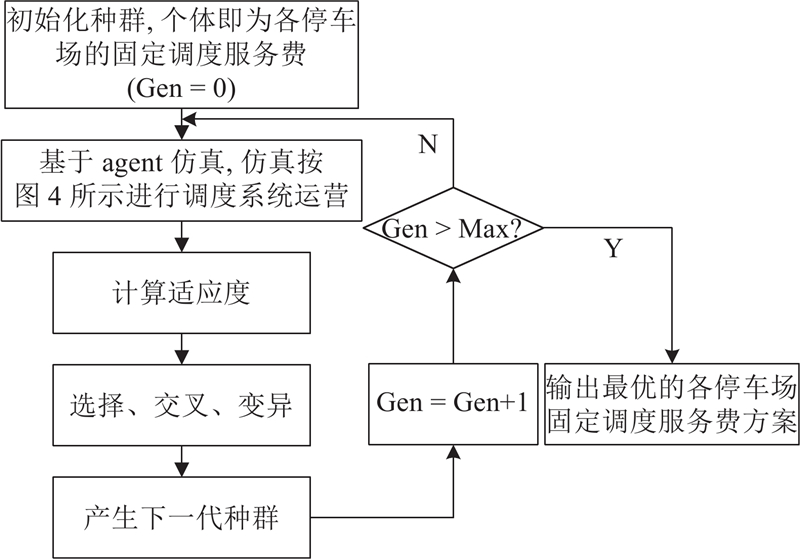
以0.1为步长,当AV渗透率r为0.1~0.9时,对3类策略进行比较分析. 在每一个AV渗透率下,策略2)基于自动驾驶车辆调度的统一收费策略,以1元为步长,在0~8元内寻找使综合指标最大的服务费收费值. 策略3)基于自动驾驶车辆调度的差异化收费策略,以式(10)为适应度函数,通过遗传算法优化各停车场的调度服务费. 具体设置如下:种群下限为0元,上限为8元,种群初始值在上下限范围内随机生成,变异率为0.15,交叉率为0.85,种群迭代代数为50,种群数量为25.
由于AV停车活动发生在出行者到达目的地后,重点关注HDV时间指标,包括平均行驶时间
如图9所示为不同策略下HDV出行者时间指标在不同r下的对比图. 可见,在3项时间指标上,基于AV调度的差异化收费策略与统一收费策略相当,或略低于统一收费. 这是因为差异化的调度服务费会通过影响HDV停车选择来优化停车资源配置,两者皆优于常规策略.
图 9
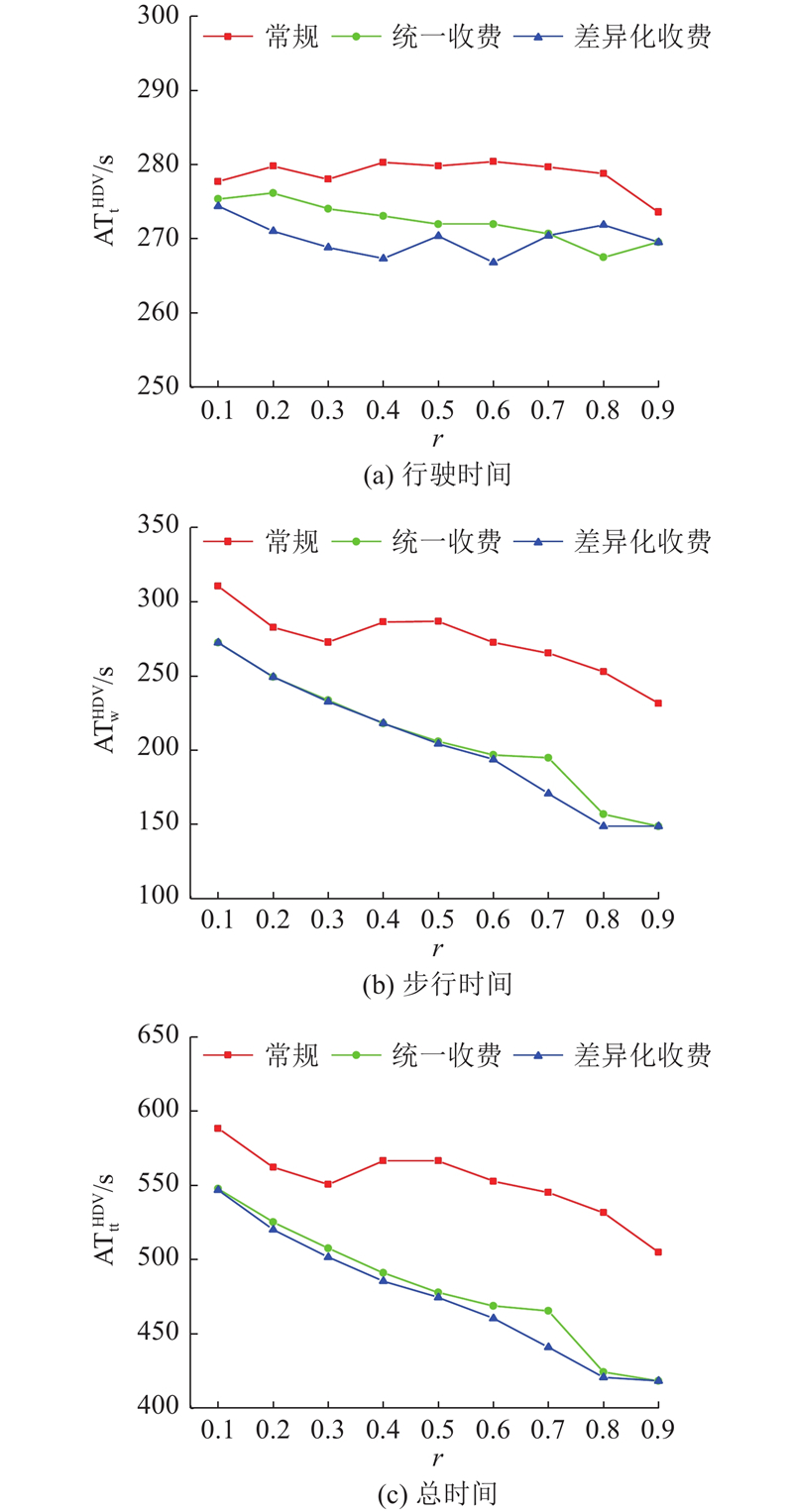
图 9 不同策略下有人驾驶车辆的平均时间指标
Fig.9 Average time of human-driven vehicles under different strategies
如图10所示为不同策略的HDV平均行驶里程
图 10
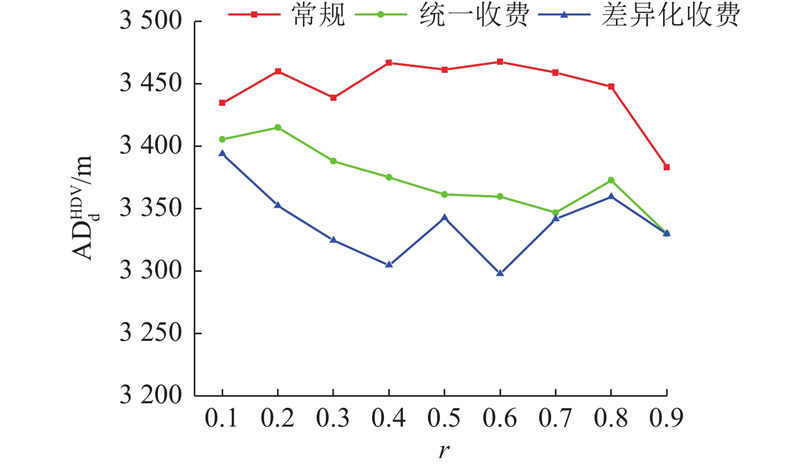
图 10 不同策略下有人驾驶车辆的平均行驶里程
Fig.10 Average travel mileage of human-driven vehicles under different strategies
对于AV而言,从进入点到目的地的行驶里程相对固定,重点关注AV从目的地到停车场的行驶距离,即平均停车里程
图 11

图 11 不同策略下自动驾驶车辆的平均停车里程
Fig.11 Average parking mileage of autonomous vehicles under different strategies
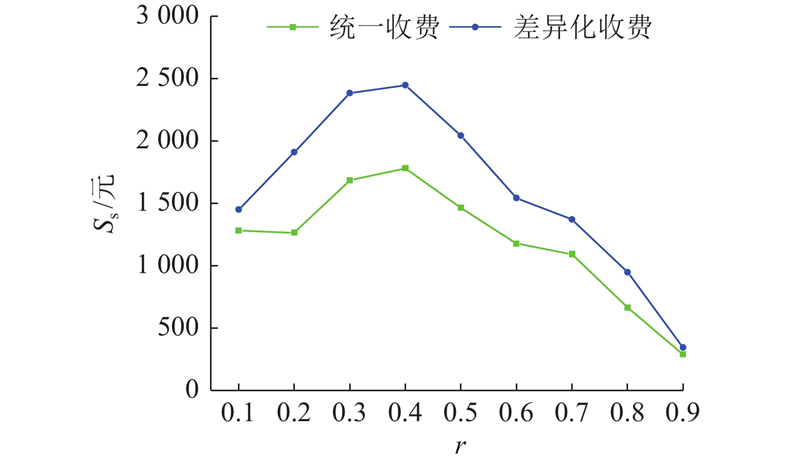
如图12所示为2项基于AV调度收费策略的总调度服务费收入
图 12
如图13所示为不同策略下的社会成本
图 13

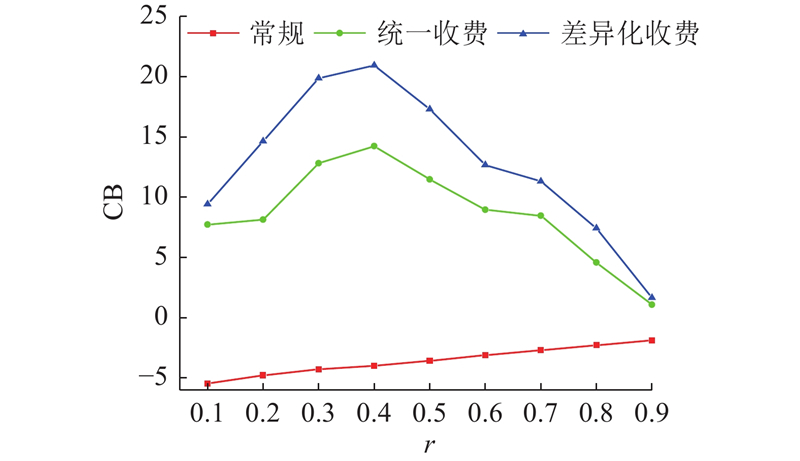
如图14所示为不同策略下的综合指标对比图. 可见,基于AV调度的差异化收费策略优于统一收费策略,且两者均显著优于常规策略.
图 14
5. 结 语
本文针对HDV和AV共存停车系统,设计基于AV调度的停车系统收费策略. 该策略在向HDV出行者收取相应费用后,通过在停车场间调度AV为HDV创造可用停车位,基于AV调度收费策略具体可以分为统一收费策略和经遗传算法优化的差异化收费策略. 基于agent模型的应用示例表明,利用2项基于AV调度的收费策略,均可以有效地降低HDV步行时间、行驶时间、行驶距离、社会成本,提升停车系统的服务费收入,从而提升系统的综合指标. 差异化收费策略通过影响HDV停车选择,可以更有效地优化停车资源配置,与统一收费策略相比,在取得更高调度服务费的同时,社会成本与统一收费相当或更低,取得了比统一收费更好的综合指标.
未来的研究将在出行者时空分布不完全确定的情况下,结合停车预测进行停车调度. 本研究中,AV仅获得与额外停车成本相当的补偿,实际上AV出行者也会追求自身利益最大化,因此AV出行者与停车系统的博弈值得探讨.
参考文献
Parking futures: shared automated vehicles and parking demand reduction trajectories in Atlanta
[J].DOI:10.1016/j.landusepol.2019.04.024 [本文引用: 1]
Architecture for parking management in smart cities
[J].DOI:10.1049/iet-its.2013.0045 [本文引用: 1]
Approximation method for estimating search times for on-street parking
[J].DOI:10.1287/trsc.2021.1067 [本文引用: 1]
Self-driving cars will change cities
[J].DOI:10.1016/j.regsciurbeco.2016.09.003 [本文引用: 1]
Exploring the economic, environmental, and travel implications of changes in parking choices due to driverless vehicles: an agent-based simulation approach
[J].DOI:10.1061/(ASCE)UP.1943-5444.0000488 [本文引用: 1]
A network traffic assignment model for autonomous vehicles with parking choices
[J].DOI:10.1111/mice.12486 [本文引用: 1]
An equilibrium analysis of commuter parking in the era of autonomous vehicles
[J].DOI:10.1016/j.trc.2018.04.024 [本文引用: 1]
Optimal parking management of connected autonomous vehicles: a control-theoretic approach
[J].DOI:10.1016/j.trc.2020.102924 [本文引用: 1]
Curbing cruising-as-substitution-for-parking in automated mobility
[J].DOI:10.1016/j.trc.2022.103853 [本文引用: 2]
Autonomous vehicle parking policies: a case study of the City of Toronto
[J].DOI:10.1016/j.tra.2021.11.003 [本文引用: 3]
The autonomous vehicle parking problem
[J].DOI:10.1016/j.tranpol.2019.01.003 [本文引用: 3]
Time-dependent on-street parking planning in a connected and automated environment
[J].DOI:10.1016/j.trc.2022.103745 [本文引用: 1]
Designing intelligent public parking locations for autonomous vehicles
[J].DOI:10.1016/j.eswa.2023.119810 [本文引用: 1]
A shared parking optimization framework based on dynamic resource allocation and path planning
[J].DOI:10.1016/j.physa.2023.128649 [本文引用: 1]
Dynamic modeling and control of taxi services in large-scale urban networks: a macroscopic approach
[J].DOI:10.1016/j.trc.2017.08.011 [本文引用: 1]
From smart parking towards autonomous valet parking: a survey, challenges and future works
[J].DOI:10.1016/j.jnca.2020.102935 [本文引用: 1]
Macroscopic modeling and dynamic control of on-street cruising-for-parking of autonomous vehicles in a multi-region urban road network
[J].DOI:10.1016/j.trc.2021.103176 [本文引用: 1]
From search-for-parking to dispatch-for-parking in an era of connected and automated vehicles: a macroscopic approach
[J].DOI:10.1061/JTEPBS.0000640 [本文引用: 1]
Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies
[J].DOI:10.1016/j.tra.2016.10.013 [本文引用: 1]
A discriminated release strategy for parking variable message sign display problem using agent-based simulation
[J].DOI:10.1109/TITS.2015.2445929 [本文引用: 1]
Development and calibration of the anisotropic mesoscopic simulation model for uninterrupted flow facilities
[J].DOI:10.1016/j.trb.2009.06.001 [本文引用: 1]
An improved incremental assignment model for parking variable message sign location problem
[J].DOI:10.1002/atr.1305 [本文引用: 1]
Approximate solution procedure for dynamic traffic assignment
[J].DOI:10.1061/(ASCE)TE.1943-5436.0000518 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}