

随着人民生活水平的提高,生活垃圾数量迅猛剧增,大量的垃圾对人类的健康、环境的破坏及经济的发展带来严重的威胁. 传统的垃圾回收需要大量的人力和物力,利用深度学习技术,对垃圾进行智能化、自动化处理将成为一种趋势,可以提高垃圾的处理效率,有利于绿色经济和低碳循环发展.
近年来,基于深度学习的目标检测算法已经成为主流,深度学习以其强大的特征表示能力和端到端的学习能力,极大地提高了目标检测的精度和效率. 其中目标检测算法主要分为一阶段和二阶段算法两大类. 二阶段算法在第一阶段专注于找到物体的位置,得到建议框,提高准确率和召回率;第二阶段专注于对建议框进行物体分类,找到更加精确的锚框,其算法有R-CNN、SPP-Net、Fast R-CNN和 Faster R-CNN[1-4]. 一阶段算法减少了生成建议框这个阶段,直接产生物体的类别概率和位置坐标值,经过单次检测可以直接得到最终的检测结果,其代表算法有Yolo[5]、SSD[6]. 这2种算法的处理过程不同,在性能表现上的差异较大. 前者在检测精度和定位精度方面具有优势,后者在速度方面具有优势.
Yolo系列算法作为一阶段算法,因其优秀的检测性能得到了广泛的应用,对于边缘端设备十分友好. 研究人员对Yolo系列算法提出许多改进方法. 李小波等[7-8]在模型中添加注意力机制,增强特征图的信息表达能力,提高模型对小尺度目标的检测能力,但是模型的复杂度相应增加,不利于边缘端部署. 李仁鹰等[9-11]通过将模型的主干网络替换为MobileNetV2,并嵌入注意力机制来实现模型的轻量化,在模型复杂度上有了改进,但没有很好地兼顾精度. 王相友等[12-13]利用通道剪枝来实现模型的轻量化,杨小冈等[14]在将模型的主干网络修改成MobileNetV3的基础上进行迭代剪枝. 这2种改进方式都使模型的推理速度大大加快,但是精度有所下降.
以上研究只针对精度和轻量化其中一种进行改进,不能同时满足检测精度和推理速度2种要求. 本文对Yolov5s模型进行轻量化改进,在保证模型精度的同时,提高模型的推理速度,对于边缘端设备更加友好.
1. Yolov5算法改进
从模块和数据2个方面进行改进. 如图1所示,在模块方面,引入Stem模块和深度可分离卷积,对C3模型进行改进. 在数据方面,利用K-means++算法重新计算物体的锚框值.
图 1

1.1. 改进模型的结构图
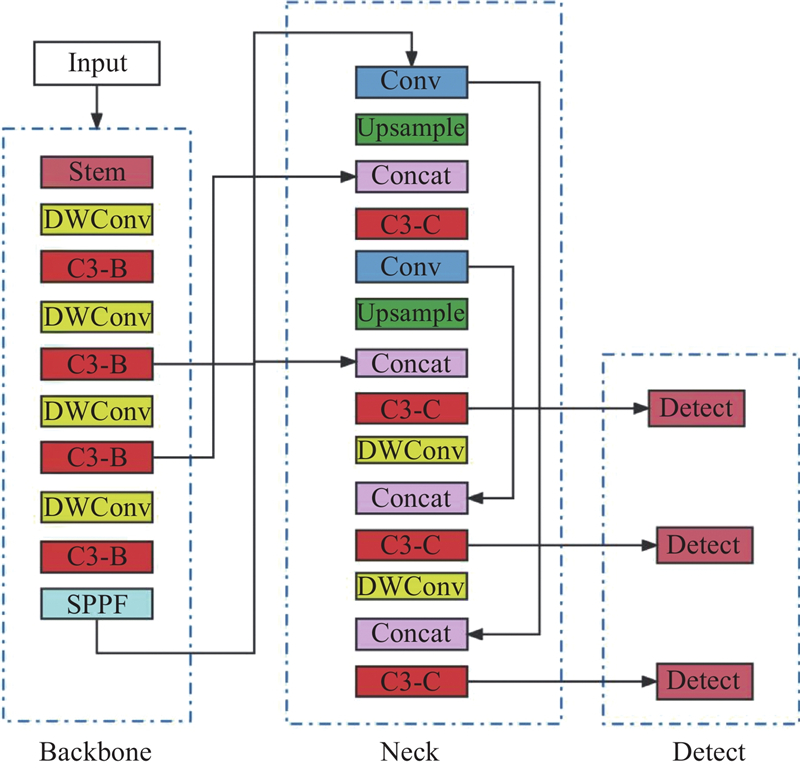
以Yolov5结构为基础,对模型的主干网络和颈部网络进行修改. 模型结构如图2所示,模型主要由输入(Input)、主干网络(Backbone)、颈部网络(Neck)和检测头(Detect)4部分组成. 将Stem模块作为输入图像处理模块,能够在几乎不增加模型参数量的同时,提高模型的特征提取能力,因此采用Stem模块作为图像输入的处理模型[15]. 为了减少模型的复杂度,提高模型的推理速度,将主干网络和颈部网络中的3×3降采样普通卷积改成深度可分离卷积. 为了进一步减少参数量和模型复杂度,将颈部结构中的C3模块改进成C3-C模块来减少参数量,将backbone中的C3模块改进成C3-B模块来增强图像特征的提取能力.
图 2
1.1.1. Stem模块
Stem模块来源于移动端的实时目标检测模型Peleenet[16]. 图3给出Stem模块结构图. 可以看出,Stem模块首先进行快速降维操作,采用卷积核为 3×3、步长(stride)为2的卷积层实现. 采用两分支的结构:一个分支用步长为1、卷积核为 1×1 的卷积层和步长为2、卷积核为3×3的卷积层,另一个分支使用步长为2、卷积核为2×2的最大池化层(Maxpool). 最大池化层在保留主要特征的同时,减少了参数量和计算量,防止了过拟合的发生. Stem模块在进行第一次降采样后,分成2条路径对图像特征进行提取,使得模型可以提取更加丰富的特征. 这样可以在不带来过多计算耗时的前提下,提高网络的特征表达能力.
图 3

1.1.2. 深度可分离卷积
图 4

图 4 深度可分离卷积模块的结构图
Fig.4 Structural diagram of depthwise separable convolution module
传统卷积的计算量为
深度可分离卷积的计算量为
式中:DK ×DK为卷积核的尺寸,M为卷积核的深度,DW×DH为输出特征图的尺寸,N为输出特征图的深度. 深度可分离卷积分为深度卷积和逐点卷积2个阶段,相比于传统卷积,深度可分离卷积在完成相同计算目的的情况下计算开销更小. 深度可分离卷积与传统卷积的计算量之比为
以3×3卷积为例,深度可分离卷积的参数量可以减少至普通卷积的(1/9+1/N)倍,随着网络层数的增加,通常会导致模型参数量的显著增加,但使用深度可分离卷积能够有效地减少模型参数量.
1.1.3. C3模块改进
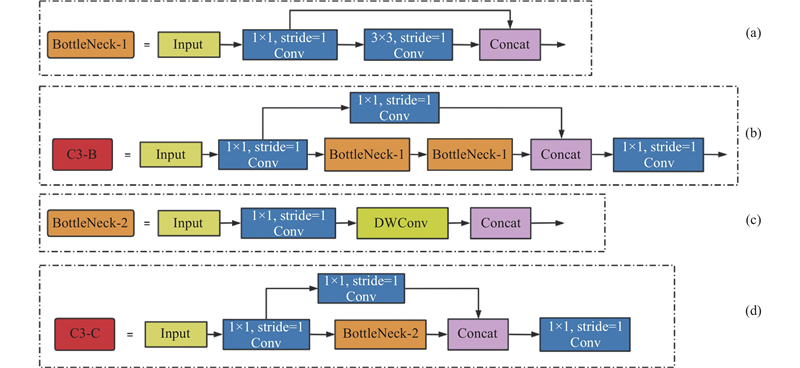
对于在嵌入式端实现的垃圾分类识别,既要应对算力不足的情况,还要考虑复杂环境下对物体的识别准确率,因此对主干网络和颈部网络的C3模块进行改进. 如图5(a)所示为主干网络使用的bottleneck模块. 该模块包含了跨界融合层,又包含了多个Conv2d卷积层,因而该模块既可以实现对图像低层特征和高层特征的融合(可以弥补低分辨率的高层特征图中空间信息的损失),又能够实现对图像更深层特征的提取. 在主干网络的C3模块中使用了2个BottleNeck-1模块(见图5(b)),使得改进后C3模块的输出特征图含有更强的语义信息与更多的细节信息,以提升该模块的特征提取能力[20]. 如图5(c)所示,该模块将颈部网络中bottleneck模块的普通3×3卷积改成深度可分离卷积(DWConv),将修改后的bottleneck模块应用于颈部网络的C3模块中,形成C3-C模块(见图5(d)),减少了模型的参数量.
图 5
1.2. 数据预处理
Yolov5使用 K-means算法对通用目标检测数据集COCO进行聚类,获得初始的先验锚框参数. 利用K-means算法,随机分配初始聚类中心,可能会导致初始聚类中心与最佳聚类中心相差甚远,且初始的先验锚框参数仅适用于COCO、VOC和ImageNet等开放场景数据集,而本文数据集的检测对象与其存在较大的差异[21]. 选择 K-means++算法对锚框进行重新聚类,生成更优的锚框值,不会带来额外的参数和计算量.
式中:D(x)为每一个样本点到当前中心的最短距离,每次分配一个对象,会根据现有的聚类对象重新计算聚类中心,重复该过程直到没有对象被重新分配到其他的聚类中,最后筛选出K聚类中心. 尽管K -means++算法中用于初始选择聚类中心的方法需要花费额外的时间,但是K-means算法在选取合适的聚类中心后会很快收敛,使用K-means++算法选择物体的锚框值,使得Yolov5算法可以选择最具代表性的锚框值,使其在训练过程中能够更好地预测目标框的大小,提高模型的准确性和稳定性.
2. 实验与结果分析
2.1. 实验数据
使用自己拍摄的垃圾分类数据集和从网上爬取的数据集,重新组合成包含3 305张图片的垃圾分类数据集. 该数据集涵盖了6种常见垃圾(瓶子、电池、笔、口罩、易拉罐和纸杯),每张图片的物品标注数量不同,这样的数据集可以更好地反映现实场景. 为了获得更准确的训练效果,将数据集按照9∶1的比例进行划分,其中90%的数据,即2 975张图片用于训练,剩下的10%的数据,即330张图片用于验证. 每个类别的训练样本数量如下:瓶子1571个、电池1850个、笔812支、口罩902个、易拉罐946个、纸杯887个.
2.2. 实验参数配置
模型的训练采用pytorch1.10.1深度学习框架,CUDA 10.1. 硬件配置为GeForce RTX 3080显卡、10 GB显存. 训练时的参数配置如表1所示.
表 1 超参数设置
Tab.1
| 训练参数 | 参数值 | 训练参数 | 参数值 | |
| 动量 | 0.937 | 循环学习率 | 0.1 | |
| 权重衰减率 | 0.0005 | 预热学习轮次 | 3 | |
| 批量大小 | 32 | 预热学习动量 | 0.8 | |
| 迭代次数 | 100 | 预热初始学习率 | 0.1 | |
| 初始学习率 | 0.01 | — | — |
2.3. 实验评价指标
在上述统一的实验配置环境中进行对比实验,采用召回率R、精确率P、均值平均精度(mean average precision, mAP)、模型参数量和模型推理速度作为评价指标. mAP@0.5为IOU设为0.5时,计算每一类的所有图片的AP,对所有类别的AP求平均值. mAP@0.5:0.95表示在不同IOU阈值(0.5~0.95,步长为0.05)下的平均mAP[24]. mAP的计算如下所示:
式中:TP为正确识别出的垃圾样本数量,FN为模型未能识别出的垃圾样本数量,FP为模型错误识别的垃圾样本数量;P为精确率,表示模型预测为垃圾的样本中预测正确的占比;R为召回率,表示所有的垃圾样本中模型能够识别出来的数量占比;n为垃圾样本的类别数;i为当前类别的序号.
2.4. 实验结果分析
图 6
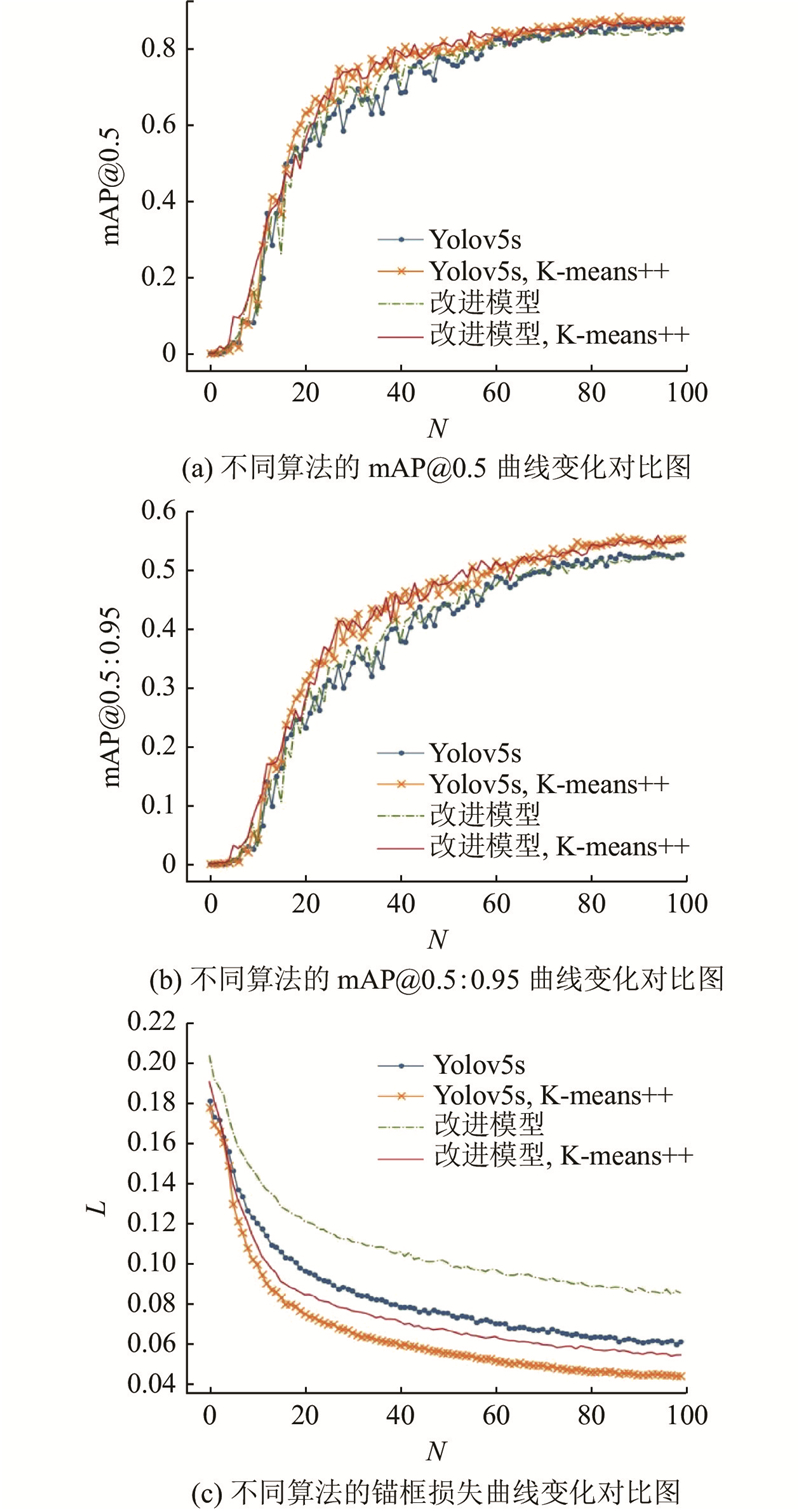
图 6 Yolov5s模型和改进模型的性能对比图
Fig.6 Performance comparison between Yolov5s model and improved model
如表2所示,改进模型和Yolov5s模型在加入该算法后,准确率、召回率和平均精度都明显提升. 具体来说,Yolov5s模型在加入K-means++算法后,与未加入该算法相比,准确率提升了2.1%,召回率提升了4.4%,mAP@0.5提升了2.2%,mAP@0.5:0.95提升了2.6%. 改进模型在加入K-means++算法后,与未加入该算法相比,准确率提升了3.8%,召回率提升了3.4%,mAP@0.5提升了2%,mAP@0.5:0.95提升了2.7%. 这说明K-means算法对锚框进行优化的有效性,能够显著提高模型的准确率和稳定性. 改进模型加上K-means++算法后,与未加入K-means++算法的Yolov5s模型相比,检测任务的表现更加优越. 具体来说,加上K-means++算法的改进模型与未加入K-means++算法的Yolov5s模型相比,准确率提升了6.3%,召回率提升了1.9%,mAP@0.5提升了0.8%,mAP@0.5:0.95提升了3%. 这表明最终改进的模型能够更好地适应各种场景和数据集,表现更加优异. 改进模型在参数量上比Yolov5s模型小,参数量减少至原模型的77.1%. 将改进后的模型部署到Jetson Nano上,每帧的推理时间达到106.1 ms,与Yolov5s原模型相比,速度提高了21.9%. 这表明改进后的模型具有更高的计算效率和更好的实用性,能够更好地满足实际需求.
表 2 Yolov5s模型和改进模型的实验结果对比
Tab.2
| 模型 | P | R | mAP@0.5 | mAP@0.5:0.95 | Np/106 | t/ms |
| Yolov5s | 0.834 | 0.792 | 0.861 | 0.529 | 7.026307 | 135.9 |
| Yolov5s+K-means++ | 0.855 | 0.836 | 0.883 | 0.555 | 7.026307 | 135.9 |
| 改进模型 | 0.859 | 0.777 | 0.849 | 0.532 | 5.421475 | 106.1 |
| 改进模型+K-means++ | 0.897 | 0.811 | 0.869 | 0.559 | 5.421475 | 106.1 |
图 7
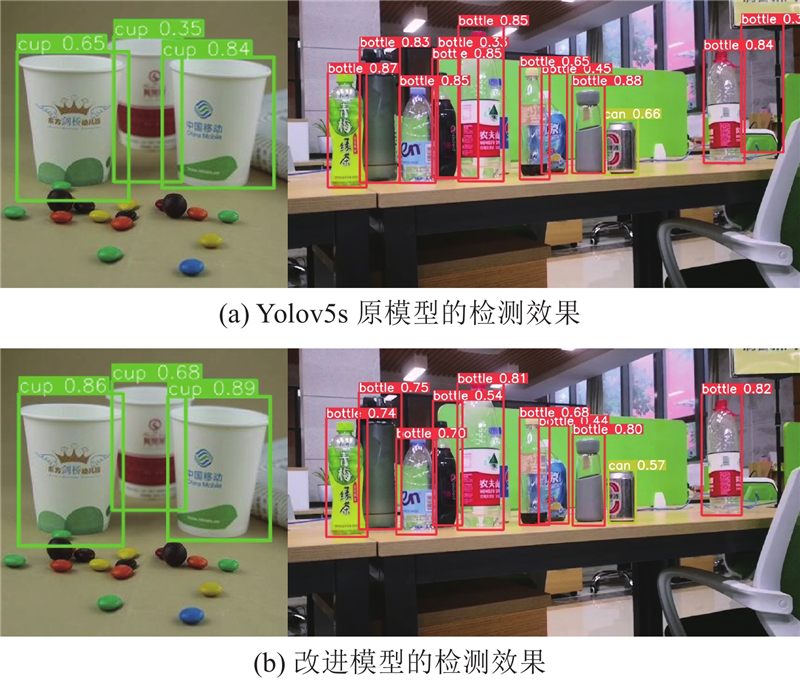
图 7 Yolov5s模型和改进模型的检测结果对比图
Fig.7 Comparison of detection results between Yolov5s and improved model
3. 结 语
针对边缘端算力不足导致目标检测模型实时推理性能差的问题,本文提出轻量化的Yolov5模型. 将自制的私有数据集和网上爬取的数据重新组合成垃圾分类数据集. 在数据上,使用K-means++算法优化锚框;在模型上,引入Stem模块提高特征提取能力,利用深度可分离卷积减少模型的参数量和复杂度. 对主干网络的C3模型进行改进,加强了特征提取能力. 实验表明,改进模型与Yolov5s模型相比,在提高模型精度和稳定性的同时,明显提升了推理速度,减少了摄像头实时检测卡顿的情况. 本文的研究为边缘端的垃圾分类系统开发提供了科学设计的依据,具有广阔的应用前景.
参考文献
Spatial pyramid pooling in deep convolutional networks for visual recognition
[J].DOI:10.1109/TPAMI.2015.2389824
Faster R-CNN: towards real time object detection with region proposal networks
[J].DOI:10.1109/TPAMI.2016.2577031 [本文引用: 1]
融合注意力机制的Yolov5口罩检测算法
[J].
Yolov5 mask detection algorithm integrating attention mechanism
[J].
基于改进Yolov5的复杂背景红外弱小目标检测算法
[J].
Infrared dim small target detection algorithm based on improved Yolov5 in complex background
[J].
基于M-Yolov4模型的轻量化目标检测算法
[J].DOI:10.19652/j.cnki.femt.2103482 [本文引用: 1]
Lightweight target detection algorithm based on M-Yolov4 model
[J].DOI:10.19652/j.cnki.femt.2103482 [本文引用: 1]
面向仓储货物的轻量化目标检测算法
[J].
Lightweight object detection algorithm for warehousing goods
[J].
基于轻量化 Yolov3的遥感军事目标检测算法
[J].DOI:10.3778/j.issn.1002-8331.2106-0026 [本文引用: 1]
Remote sensing military target detection algorithm based on lightweight Yolov3
[J].DOI:10.3778/j.issn.1002-8331.2106-0026 [本文引用: 1]
基于改进Yolov4模型的马铃薯中土块石块检测方法
[J].
Detection method of soil and stone in potato based on improved Yolov4 model
[J].
基于深度学习的移动机器人障碍物检测研究
[J].
Research on obstacle detection of mobile robots based on deep learning
[J].
基于改进Yolov5的轻量化航空目标检测方法
[J].DOI:10.13976/j.cnki.xk.2021.1240 [本文引用: 1]
A lightweight aerial target detection method based on improved Yolov5
[J].DOI:10.13976/j.cnki.xk.2021.1240 [本文引用: 1]
GSDCPeleeNet: 基于PeleeNet的高效轻量化卷积神经网络
[J].
GSDCPeleeNet: efficient lightweight convolutional neural network based on PeleeNet
[J].
改进MobileNetv3-Yolov3交通标志牌检测算法
[J].
Improved MobileNetv3-Yolov3 traffic sign detection algorithm
[J].
基于改进Yolov5s的车辆目标检测算法
[J].
Vehicle target detection algorithm based on improved Yolov5s
[J].
基于改进Yolov5s的可回收垃圾的检测算法
[J].
Detection algorithm of recyclable garbage based on improved Yolov5s
[J].
基于改进Yolov5m的采摘机器人苹果采摘方式实时识别
[J].
Real time recognition of apple picking method based on improved YoloV5m picking robot
[J].
改进Yolov5s的手语识别算法研究
[J].
Research on improved Yolov5s sign language recognition algorithm
[J].
改进Yolov5s的航拍图像车辆检测研究
[J].DOI:10.14016/j.cnki.jgzz.2022.10.022 [本文引用: 1]
Research on improving Yolov5s aerial image vehicle detection
[J].DOI:10.14016/j.cnki.jgzz.2022.10.022 [本文引用: 1]
基于注意力机制与加权盒函数的Yolov5的行人摔倒检测算法
[J].
Yolov5 pedestrian fall detection algorithm based on attention mechanism and weighted box function
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}