[3]
EMAMI A, SARVI M, BAGLOEE S A Short-term traffic flow prediction based on faded memory Kalman Filter fusing data from connected vehicles and Bluetooth sensors
[J]. Simulation Modelling Practice and Theory , 2020 , 102 : 1 - 17
[本文引用: 1]
[4]
KUMAR S V, VANAJAKSHI L Short-term traffic flow prediction using seasonal ARIMA model with limited input data
[J]. European Transport Research Review , 2015 , 7 (3 ): 1 - 9
[本文引用: 2]
[5]
GIRAKA O, SELVARAJ V K Short-term prediction of intersection turning volume using seasonal ARIMA model
[J]. Transportation Letters , 2020 , 12 (7 ): 483 - 490
DOI:10.1080/19427867.2019.1645476
[本文引用: 1]
[6]
傅贵, 韩国强, 逯峰, 等 基于支持向量回归的短时交通流预模型
[J]. 华南理工大学学报: 自然科学版 , 2013 , 41 (9 ): 71 - 76
[本文引用: 3]
FU Gui, HAN Guo-qiang, LU Feng, et al Short term traffic flow prediction model based on support vector machine regression
[J]. Journal of South China University of Technology: Natural Science Edition , 2013 , 41 (9 ): 71 - 76
[本文引用: 3]
[7]
CHENG S F, LU F, PENG P, et al Short-term traffic forecasting: an adaptive ST-KNN model that considers spatial heterogeneity
[J]. Computers Environment and Urban Systems , 2018 , 71 : 186 - 198
DOI:10.1016/j.compenvurbsys.2018.05.009
[本文引用: 3]
[8]
ZHAO Z, CHEN W H, WU X M, et al LSTM network: a deep learning approach for short-term traffic forecast
[J]. IET Intelligent Transport Systems , 2017 , 11 (2 ): 68 - 75
DOI:10.1049/iet-its.2016.0208
[本文引用: 3]
[9]
殷齐, 丁飞, 朱跃, 等 基于CNN与多尺度特征融合城市交通流预测模型
[J]. 计算机技术与发展 , 2022 , 32 (10 ): 175 - 181
DOI:10.3969/j.issn.1673-629X.2022.10.029
[本文引用: 1]
YIN Qi, DING Fei, ZHU Yue, et al An urban traffic flow prediction model based on CNN and Multi-scale feature fusion
[J]. Computer Technology and Development , 2022 , 32 (10 ): 175 - 181
DOI:10.3969/j.issn.1673-629X.2022.10.029
[本文引用: 1]
[10]
KIM Y, WANG P, ZHU Y F, et al. A capsule network for traffic speed prediction in complex road networks [C]// 2018 Sensor Data Fusion: Trends, Solutions, Applications (SDF) . Bonn: IEEE, 2018: 1–6
[本文引用: 1]
[11]
TIAN C Y, CHAN W K Spatial-temporal attention wavenet: a deep learning framework for traffic prediction considering spatial-temporal dependencies
[J]. IET Intelligent Transport Systems , 2021 , 1 (4 ): 549 - 561
[本文引用: 2]
[12]
TANG J J, ZENG J Spatiotemporal gated graph attention. network for urban traffic flow prediction based on license plate recognition data
[J]. Computer-aided Civil and Infrastructure Engineering , 2022 , 37 : 3 - 23
DOI:10.1111/mice.12688
[本文引用: 2]
[13]
路佳玲, 魏志成, 田多. 基于时空图卷积网络的城市交通流预测模型 [J]. 武汉理工大学学报: 交通科学与版, 2023, 47(2): 234–238.
LU Jia-ling, WEI Zhi-cheng, TIAN Duo. Urban traffic flow prediction model based on spatio-temporal graph convolutional network [J]. Journal of Wuhan University of Technology: Transportation Science and Engineering , 2023, 47(2): 234–238.
[14]
LI F X, FENG J, YAN H, et al. Dynamic graph convolutional recurrent network for traffic prediction: benchmark and solution [EB/OL]. [2021-05-03]. https://arxiv.org/abs/2104.14917v2.
[15]
ZHENG C P, FAN X L, WANG C, et al GMAN: a graph multi-attention network for traffic prediction
[J]. Association for the Advancement of Artificial Intelligence , 2020 , 34 (1 ): 1234 - 1241
[本文引用: 1]
[16]
ZELLNER A, MONTMARQUETTE C A study of some aspects of temporal aggregation problems in econometric analyses
[J]. The Review of Economics and Statistics , 1971 , 53 (4 ): 335 - 342
DOI:10.2307/1928734
[本文引用: 1]
[17]
ROSSANA R J, SEATER J J Temporal aggregation and economic time series
[J]. Journal of Business and Economic Statistics , 1995 , 13 : 441 - 451
[本文引用: 1]
[18]
VLAHOGIANNI E I, KARLAFTIS M G, GOLIAS J C Statistical methods for detecting nonlinearity and nonstationarity in univariate short-term time-series of traffic volume
[J]. Transportation Research Part C , 2006 , 14 (5 ): 351 - 367
DOI:10.1016/j.trc.2006.09.002
[本文引用: 1]
[19]
BYRON J, SHAWN M T, WILLIAM L E, et al. Intelligent transportation system data archiving: statistical techniques for determining optimal aggregation widths for inductance loop detectors[J]. Transportation Research Record , 2000: 85-93.
[本文引用: 2]
[20]
PARK D, RILETT L R, GAJEWSKI B J, et al Identifying optimal data aggregation interval sizes for link and corridor travel time estimation and forecasting
[J]. Transportation , 2009 , 36 (1 ): 77 - 95
DOI:10.1007/s11116-008-9180-x
[本文引用: 1]
[21]
SMITH B L, ULMER J M Freeway traffic flow rate measurement: investigation into impact of measurement time interval
[J]. Journal of Transportation Engineering , 2003 , 129 (3 ): 223 - 229
DOI:10.1061/(ASCE)0733-947X(2003)129:3(223)
[本文引用: 1]
[22]
于雷, 陈旭梅, 耿彦斌, 等 基于小波分解的智能交通系统数据集成方法
[J]. 清华大学学报: 自然科学版 , 2004 , 44 (6 ): 793 - 796
[本文引用: 1]
YU Lei, CHEN Xu-mei, GENG Yan-bin, et al Data integration method of intelligent transportation system based on wavenet decomposition
[J]. Journal of Tsinghua University: Natural Science Edition , 2004 , 44 (6 ): 793 - 796
[本文引用: 1]
[23]
陆振波, 夏井新, 焦恬恬, 等 城市道路交通流监测数据最优汇集时间间隔分析
[J]. 东南大学学报: 自然科学版 , 2012 , 42 (5 ): 1000 - 1005
[本文引用: 1]
LU Zhen-bo, XIA Jing-xin, JIAO Tian-tian, et al Analysis of optimal collection time interval of urban road traffic flow monitoring data
[J]. Journal of Southeast University: Natural Scienc Edition , 2012 , 42 (5 ): 1000 - 1005
[本文引用: 1]
[25]
GOAN E, FOOKES C. Bayesian neural networks: an intro- duction and survey[G]// Case studies in applied bayesian data science . Charm: Springer, 2020: 45-87.
[本文引用: 1]
道路交通流短时预测方法综述
2
2009
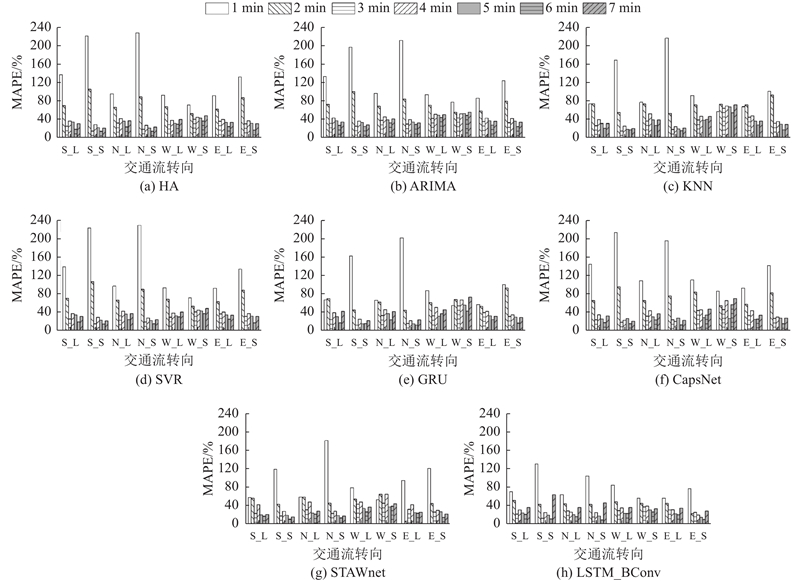
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... HA[1 ] :历史平均法(historical average, HA),是一种较为经典的时间序列预测方法,该模型利用历史数据的平均值来预测未来的数据. ...
道路交通流短时预测方法综述
2
2009
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... HA[1 ] :历史平均法(historical average, HA),是一种较为经典的时间序列预测方法,该模型利用历史数据的平均值来预测未来的数据. ...
基于Kalman滤波的城市环路交通流短时预测研究
2
2006
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... [2 ]以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
基于Kalman滤波的城市环路交通流短时预测研究
2
2006
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... [2 ]以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
Short-term traffic flow prediction based on faded memory Kalman Filter fusing data from connected vehicles and Bluetooth sensors
1
2020
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
Short-term traffic flow prediction using seasonal ARIMA model with limited input data
2
2015
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... ARIMA[4 ] : 差分整合移动平均自回归模型(autoregressive integrated moving average model ,ARIMA),是时间序列预测分析方法之一. ...
Short-term prediction of intersection turning volume using seasonal ARIMA model
1
2020
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
基于支持向量回归的短时交通流预模型
3
2013
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... [6 ]将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... SVR[6 ] :支持向量回归(support vector regression ,SVR),是另一种经典的时间序列分析模型,它使用线性支持向量机进行回归任务. ...
基于支持向量回归的短时交通流预模型
3
2013
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... [6 ]将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... SVR[6 ] :支持向量回归(support vector regression ,SVR),是另一种经典的时间序列分析模型,它使用线性支持向量机进行回归任务. ...
Short-term traffic forecasting: an adaptive ST-KNN model that considers spatial heterogeneity
3
2018
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... [7 ]将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... KNN[7 ] :K近邻(K nearest neighbor,KNN)是一种既可用于分类又可用于回归的机器学习算法. 对于给定测试样本,基于距离度量找出训练集中与其最靠近的K 个训练样本,然后基于这K 个“邻居”的信息来进行预测. ...
LSTM network: a deep learning approach for short-term traffic forecast
3
2017
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... [8 ]使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... LSTM[8 ] :长短时记忆网络(long short-term memory,LSTM)是一种特殊的RNNs,可以较好地解决长时依赖问题,是时间序列预测中常用的一种模型. ...
基于CNN与多尺度特征融合城市交通流预测模型
1
2022
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
基于CNN与多尺度特征融合城市交通流预测模型
1
2022
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
1
... CapsNet[10 ] :胶囊网络(capsule network,CapsNet),利用CapsNet网络从交通状态图像中提取高层特征并获取各个节点之间的空间依赖性. ...
Spatial-temporal attention wavenet: a deep learning framework for traffic prediction considering spatial-temporal dependencies
2
2021
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... STAWnet[11 ] :时空注意力波网络(spatial-temporal attention wavenet,STAWnet),该模型使用时间卷积捕捉交通流的时间依赖性,使用自注意力网络捕捉不同节点之间的动态空间相关性. ...
Spatiotemporal gated graph attention. network for urban traffic flow prediction based on license plate recognition data
2
2022
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
... [12 ]基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
GMAN: a graph multi-attention network for traffic prediction
1
2020
... 目前大多数城市短时交通流预测常常将交通流数据汇集成5 、10 、15 min等固定的统计间隔时间序列,采用统计学模型、机器学习模型、深度学习模型预测未来时间段的交通流数据. 基于统计学的模型主要包括:历史平均模型[1 ] 、卡尔曼滤波模型[2 -3 ] 和自回归综合移动平均模型[4 ] 等. 例如,王均等[2 ] 以2 min作为采样间隔统计每个检测点的交通流量、速度和占有率,提出利用卡尔曼滤波来预测未来2 min的速度和流量数据. Giraka等[5 ] 将交通流汇集成5 min的时间间隔,建立了季节性自回归综合移动平均模型来进行预测. 基于机器学习的预测模型主要包括支持向量回归[6 ] 、K近邻模型[7 ] . 傅贵等[6 ] 将交通流汇集成5 min的时间间隔,利用支持向量回归模型进行交通流预测. Cheng等[7 ] 将交通流汇集成5 min的时间间隔,提出自适应时空K最近邻模型. 基于深度学习的预测模型主要利用循环神经网络(recurrent neural networks,RNN)[8 ] 、卷积神经网络(convolutional neural network,CNN)[9 -11 ] 和图卷积神经网络(graph convolutional networks,GCN)[12 -15 ] 等对交通流进行预测,Zhao等[8 ] 使用单一的长短期记忆网络(long short-term memory,LSTM)模型对15、30、45、60 min的交通流量进行预测. Tang等[12 ] 基于车牌识别记录,将原始数据汇集成5 min的统计间隔时间序列,提出STGGAT模型. ...
A study of some aspects of temporal aggregation problems in econometric analyses
1
1971
... 上述各模型在原始交通流数据统计处理时并没有考虑间断流数据的周期性对汇集时间间隔的影响,而是直接选择一个或多个固定的汇集时间间隔,这可能会导致间断交通流时间序列的统计波动. 目前已有学者针对数据的汇集时间间隔对数据结构的影响进行分析. Zellner等[16 ] 通过对计量经济学数据的研究,发现时间聚合会导致较低的预测精度,降低测试的能力,使得模型无法做出短期预测并且降低其发现真实短期数据异常的概率. Rossana等[17 ] 研究了时间聚合对数据的影响,通过对月度、季度、年度数据的研究发现时间聚合通过消除低频变化,导致数据聚合过程中大量信息丢失. Vlahogianni等[18 ] 通过对城市交叉口交通流数据的研究发现,时间聚合会消除交通流数据中的时间变化特征,导致重要性信息丢失,一些线性模型如ARIMA无法捕捉交通流数据中的时间变化特性. 因此,为了最大程度保留交通流数据的重要性信息,在进行预测之前尤其是在对复杂的城市间断流进行预测时,须确定数据的最优汇集时间间隔. ...
Temporal aggregation and economic time series
1
1995
... 上述各模型在原始交通流数据统计处理时并没有考虑间断流数据的周期性对汇集时间间隔的影响,而是直接选择一个或多个固定的汇集时间间隔,这可能会导致间断交通流时间序列的统计波动. 目前已有学者针对数据的汇集时间间隔对数据结构的影响进行分析. Zellner等[16 ] 通过对计量经济学数据的研究,发现时间聚合会导致较低的预测精度,降低测试的能力,使得模型无法做出短期预测并且降低其发现真实短期数据异常的概率. Rossana等[17 ] 研究了时间聚合对数据的影响,通过对月度、季度、年度数据的研究发现时间聚合通过消除低频变化,导致数据聚合过程中大量信息丢失. Vlahogianni等[18 ] 通过对城市交叉口交通流数据的研究发现,时间聚合会消除交通流数据中的时间变化特征,导致重要性信息丢失,一些线性模型如ARIMA无法捕捉交通流数据中的时间变化特性. 因此,为了最大程度保留交通流数据的重要性信息,在进行预测之前尤其是在对复杂的城市间断流进行预测时,须确定数据的最优汇集时间间隔. ...
Statistical methods for detecting nonlinearity and nonstationarity in univariate short-term time-series of traffic volume
1
2006
... 上述各模型在原始交通流数据统计处理时并没有考虑间断流数据的周期性对汇集时间间隔的影响,而是直接选择一个或多个固定的汇集时间间隔,这可能会导致间断交通流时间序列的统计波动. 目前已有学者针对数据的汇集时间间隔对数据结构的影响进行分析. Zellner等[16 ] 通过对计量经济学数据的研究,发现时间聚合会导致较低的预测精度,降低测试的能力,使得模型无法做出短期预测并且降低其发现真实短期数据异常的概率. Rossana等[17 ] 研究了时间聚合对数据的影响,通过对月度、季度、年度数据的研究发现时间聚合通过消除低频变化,导致数据聚合过程中大量信息丢失. Vlahogianni等[18 ] 通过对城市交叉口交通流数据的研究发现,时间聚合会消除交通流数据中的时间变化特征,导致重要性信息丢失,一些线性模型如ARIMA无法捕捉交通流数据中的时间变化特性. 因此,为了最大程度保留交通流数据的重要性信息,在进行预测之前尤其是在对复杂的城市间断流进行预测时,须确定数据的最优汇集时间间隔. ...
2
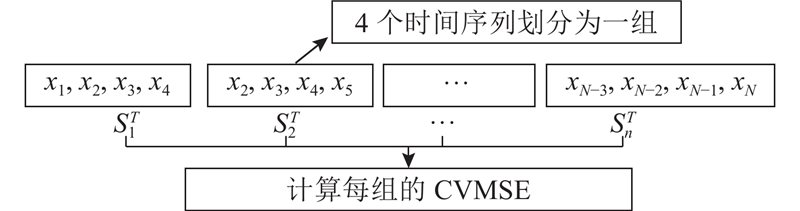
... 目前关于最优汇集时间间隔的分析主要有交叉验证均方差法[19 ] 、基于图表的统计方法[20 ] 、小波分析法[21 ] 等. Byron等[19 ] 等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
... [19 ]等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
Identifying optimal data aggregation interval sizes for link and corridor travel time estimation and forecasting
1
2009
... 目前关于最优汇集时间间隔的分析主要有交叉验证均方差法[19 ] 、基于图表的统计方法[20 ] 、小波分析法[21 ] 等. Byron等[19 ] 等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
Freeway traffic flow rate measurement: investigation into impact of measurement time interval
1
2003
... 目前关于最优汇集时间间隔的分析主要有交叉验证均方差法[19 ] 、基于图表的统计方法[20 ] 、小波分析法[21 ] 等. Byron等[19 ] 等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
基于小波分解的智能交通系统数据集成方法
1
2004
... 目前关于最优汇集时间间隔的分析主要有交叉验证均方差法[19 ] 、基于图表的统计方法[20 ] 、小波分析法[21 ] 等. Byron等[19 ] 等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
基于小波分解的智能交通系统数据集成方法
1
2004
... 目前关于最优汇集时间间隔的分析主要有交叉验证均方差法[19 ] 、基于图表的统计方法[20 ] 、小波分析法[21 ] 等. Byron等[19 ] 等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
城市道路交通流监测数据最优汇集时间间隔分析
1
2012
... 目前关于最优汇集时间间隔的分析主要有交叉验证均方差法[19 ] 、基于图表的统计方法[20 ] 、小波分析法[21 ] 等. Byron等[19 ] 等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
城市道路交通流监测数据最优汇集时间间隔分析
1
2012
... 目前关于最优汇集时间间隔的分析主要有交叉验证均方差法[19 ] 、基于图表的统计方法[20 ] 、小波分析法[21 ] 等. Byron等[19 ] 等提出采用交叉验证均方差模型来寻找交通流数据的最优汇集时间间隔,将原始交通流数据汇集成不同的时间间隔,统计交通流的交叉验证均方差,交叉验证均方差最小的汇集时间间隔即为最优汇集时间间隔. 于雷等[22 ] 基于小波分解的方法,通过对智能运输系统(intellgent traffic system,ITS)数据进行分层、相似性分析得出数据的最佳集成度,完成对数据的集成. 陆振波等[23 ] 在传统的交叉验证均方差估计的基础上,利用交通流量、时间平均速度、占有率等3个交通流基本参数,提出改进的基于交通状态矢量的交叉验证均方差模型来估计城市主干道、次干道和支路不同汇集时间间隔交通流数据的波动性,并利用t检验方法寻找交叉验证均方差变化的拐点,以确定最优汇集时间间隔,但论文并没有分析最优汇集时间间隔与信号周期的关系. ...
Long short-term memory
1
1997
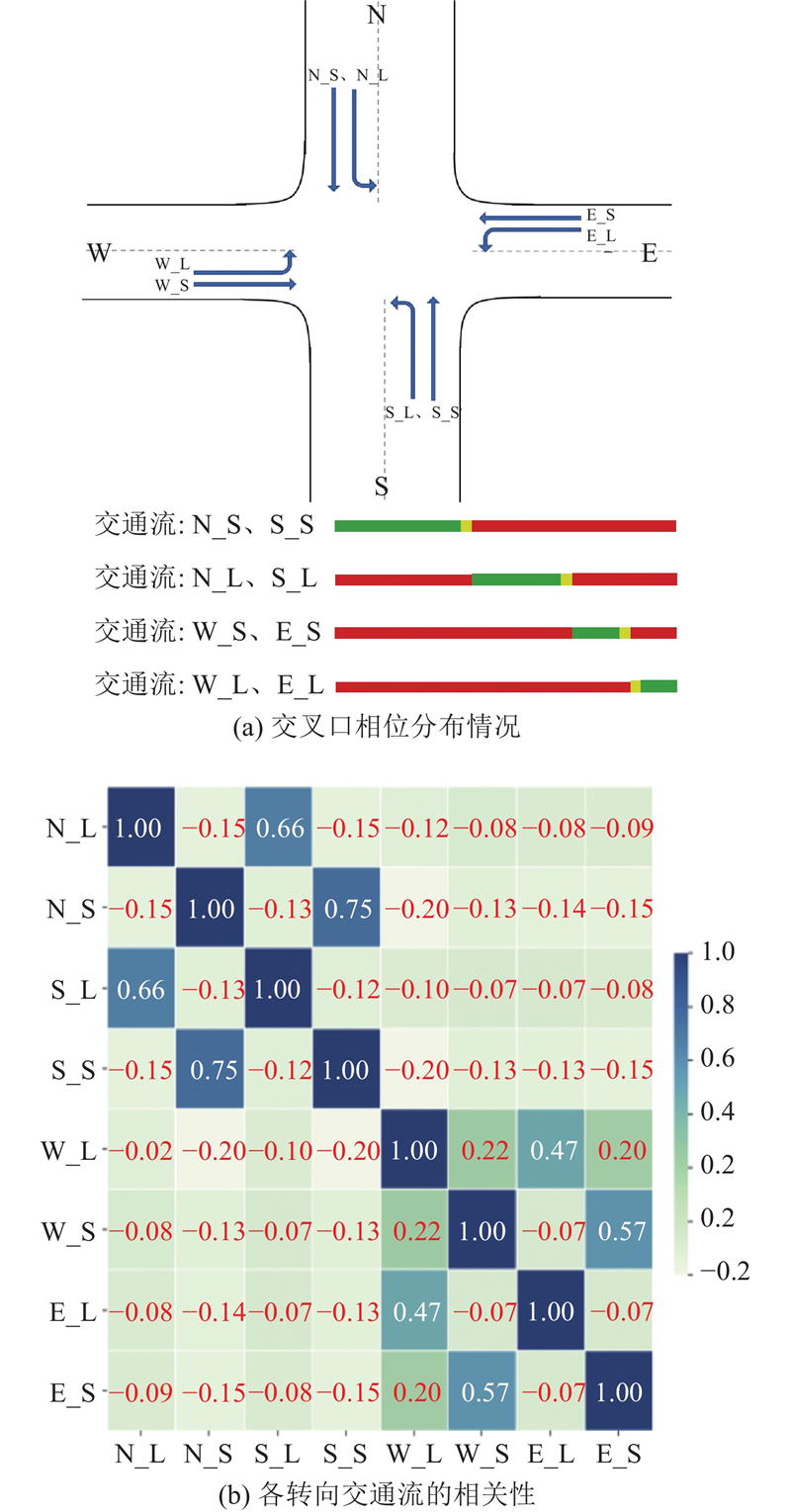
... 交通流预测旨在利用历史观测到的交通流量数据来预测未来的交通流量变化. 城市交通流会随着时间、空间的变化而变化. 在时间层面上,交通流以某一时间间隔为分界点重复呈现出一定的规律性,例如工作日早晚高峰的交通状况相似;在空间层面上,空间拓扑相连的交通流一般具有相似的变化规律. 此外,在城市信号控制交叉口,同一相位控制下的交通流呈现出较强的相关性,如图3 所示. 可以分别利用LSTM[24 ] 网络和CNN网络提取交通流的时间变化特性和空间变化特性来得到这些时空相关性. ...
1
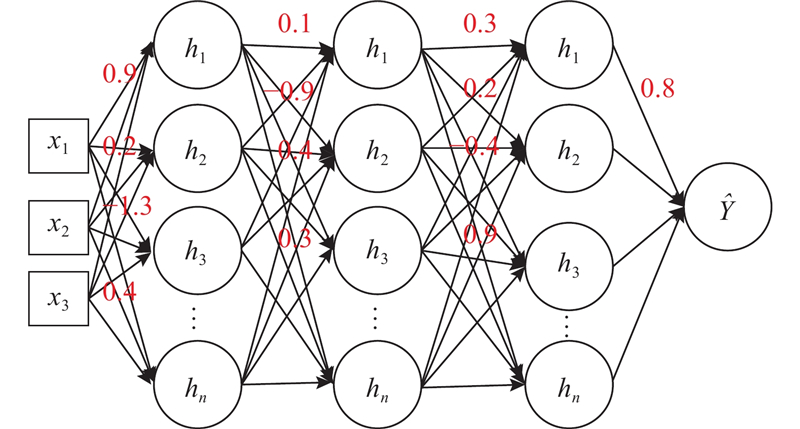
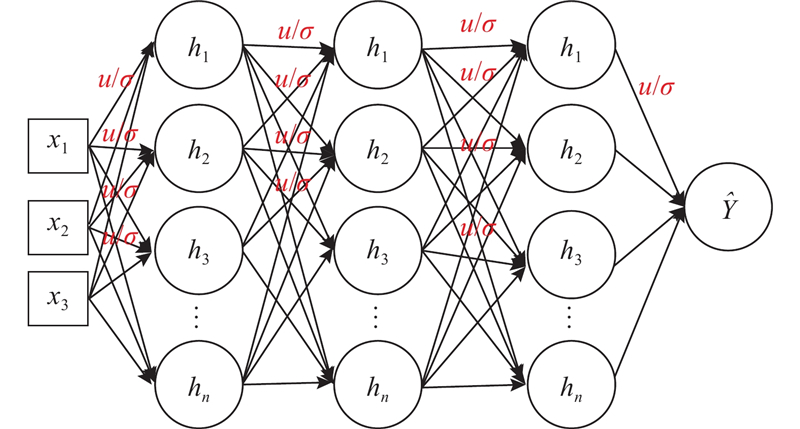
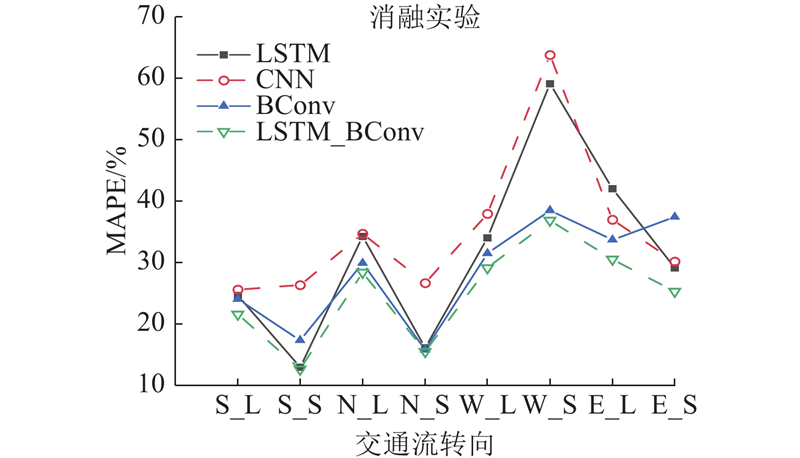
... 城市交通流尤其是短时交通流受信号控制的影响呈现出较大的波动性. 这种波动性可以利用贝叶斯神经网络(Bayesian neural network,BNN)的权重分布特性来捕捉. 在传统神经网络(见图4 )中,模型的参数 $ w $ $ {w}^{*} $ 图5 )把每个参数均看成是服从均值为 $ \mu $ $ \sigma $ [25 ] . 将贝叶斯神经网络与卷积神经网络(Bayesian convolutional neural network,BConv)结合,而BConv模型对交通流数据进行概率建模并预测的难点在于高效近似概率推断,本研究采用变分推断来模拟交通流数据的真实后验概率分布. 在进行模型训练时,贝叶斯卷积神经网络优化的是每个参数的均值和方差,如图6 所示. ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}