[1]
王清, 薛安成, 郑元杰, 等 双馈型风电集中接入对暂态功角稳定的影响分析
[J]. 电网技术 , 2016 , 40 (3 ): 875 - 881
DOI:10.13335/j.1000-3673.pst.2016.03.031
[本文引用: 1]
WANG Qing, XUE An-cheng, ZHENG Yuan-jie, et al Impact of DFIG-based wind power integration on the transient stability of power systems
[J]. Power System Technology , 2016 , 40 (3 ): 875 - 881
DOI:10.13335/j.1000-3673.pst.2016.03.031
[本文引用: 1]
[2]
CHOWDHURY M A, HOSSEINZADEH N, POTA H R, et al Transient stability of power system integrated with doubly fed induction generator wind farms
[J]. IET Renewable Power Generation , 2015 , 9 (2 ): 184 - 194
DOI:10.1049/iet-rpg.2014.0035
[本文引用: 1]
[3]
傅质馨, 张晶晶, 崔晓丹, 等 储能支撑光伏参与电网一次调频的优化控制策略研究
[J]. 可再生能源 , 2021 , 39 (11 ): 1530 - 1540
DOI:10.3969/j.issn.1671-5292.2021.11.017
[本文引用: 1]
FU Zhi-xin, ZHANG Jing-jing, CUI Xiao-dan, et al Research on optimal control strategy of photovoltaic system supported by energy storage participating in primary frequency regulation of power grid
[J]. Proceedings of the CSEE , 2021 , 39 (11 ): 1530 - 1540
DOI:10.3969/j.issn.1671-5292.2021.11.017
[本文引用: 1]
[4]
姜惠兰, 李政, 张驰, 等 SMES-DFIG提高多机系统暂态功角稳定性的控制策略
[J]. 高电压技术 , 2021 , 47 (3 ): 993 - 1001
DOI:10.13336/j.1003-6520.hve.20191421
[本文引用: 1]
JIANG Hui-lan, LI Zheng, ZHANG Chi, et al Control strategy of SMES-DFIG for improving transient power angle stability of multi-machine system
[J]. High Voltage Engineering , 2021 , 47 (3 ): 993 - 1001
DOI:10.13336/j.1003-6520.hve.20191421
[本文引用: 1]
[5]
杨海涛, 吉平, 苗淼, 等. 未来中国特高压电网结构形态与电源组成相互关系分析[J]. 电力系统自动化, 2018, 42(6): 917.
[本文引用: 1]
YANG Hai-tao, JI Ping, MIAO Miao, et al. Analysis on interrelationship between future UHV power grid structural form and power source composition in China [J]. Automation of Electric Power Systems , 2018, 42(6): 917.
[本文引用: 1]
[6]
BLOOM A, HELMAN U, HOLTTINEN H, et al. It's indisputable: five facts about planning and operating modern power systems [J]. IEEE Power and Energy Magazine , 2017, 15(6): 2230.
[本文引用: 1]
[7]
ZHU Y, LIU C, KUN K, et al. Optimization of battery energy storage to improve power system oscillation damping [J]. IEEE Transactions on Sustainable Energy , 2019, 10(3): 10151024.
[本文引用: 2]
[8]
FARRAJ A, HAMMAND E, KUNDUR D. A cyber enabled stabilizing control scheme for resilient smart grid systems [J]. IEEE Transactions on Smart Grid , 2016, 7(4): 18561865.
[本文引用: 3]
[9]
FARRAJ A, HAMMAND E, KUNDUR D. On the impact of cyber-attacks on data integrity in storage based transient stability control [J]. IEEE Transactions on Industrial Informatics , 2017, 13(6): 33223333.
[本文引用: 1]
[10]
FARRAJ A, HAMMAND E, KUNDUR D. On the use of energy storage systems and linear feedback optimal control for transient stability [J]. IEEE Transactions on Industrial Informatics , 2017, 13(4): 15751585.
[本文引用: 1]
[11]
AYAR M, OBUZ S, TREVIZAN R, et al. A distributed control approach for enhancing smart grid transient stability and resilience [J]. IEEE Transactions on Smart Grid , 2017, 8(6): 30353044.
[本文引用: 1]
[12]
LUCIA W, GHEITASI K, BAGHERZADEH M. A low computationally demanding model predictive control strategy for robust transient stability in smart grid [C]// 2018 IEEE Conference on Decision and Control (CDC) . USA: Miami Beach, FL, IEEE, 2018: 60136018.
[本文引用: 1]
[13]
FARRAJ A, HAMMAD E, KUNDUR D. A storage based multiagent regulation framework for smart grid resilience [J]. IEEE Transactions on Industrial Informatics , 2018, 14(9): 38593869.
[本文引用: 1]
[14]
孙立明, 杨博. 超级电容储能系统的无源分数阶滑模控制设计[J]. 电力系统保护与控制, 2020, 48(16): 7683.
[本文引用: 1]
SUN Li-ming, YANG Bo. Passive fractional-order sliding-mode control design of a super capacitor energy storage system [J]. Power System Protection and Control , 2020, 48(16): 7683.
[本文引用: 1]
[15]
杨博, 王俊婷, 王景博, 等. 超导磁储能系统自适应分数阶滑模控制设计[J]. 电网技术, 2020, 44(5): 1714-1722.
YANG Bo, WANG Jun-ting, WANG Jing-bo, et al. Adaptive fractional-order sliding-mode control design of super conducting magnetic energy storage systems [J]. Power System Technology , 2020, 44(5): 17141722.
[16]
ABEYWARDANA D B W, HREDZAK B, AGELIDIS V G. A fixedfrequency sliding mode controller for a boostinverterbased batterysupercapacitor hybrid energy storage system [J]. IEEE Transactions on Power Electronics , 2017, 32(1): 668680.
[本文引用: 1]
[17]
KANCHANAHARUTHAI A, MUJJALINVIMUT E. An improved backstepping sliding mode control for power systems with superconducting magnetic energy storage system [J]. International Journal of Innovative Computing, Information and Control , 2019, 15(3): 891904.
[本文引用: 1]
[18]
NI J, LIU L, LIU C, et al. Fast fixed time nonsingular terminal sliding mode control and its application to chaos suppression in power system [J]. IEEE Transactions on Circuits and Systems II: Express briefs , 2017, 64(2): 151155.
[本文引用: 1]
[19]
GHAHREMANI E, KAMWA I. Online state estimation of a synchronous generator using unscented Kalman filter from phasor measurements units [J]. IEEE Transactions on Energy Conversion , 2011, 26(4): 10991108.
[本文引用: 2]
[20]
卢强, 梅生伟, 孙元章. 电力系统非线性控制[M]. 北京: 清华大学出版社, 2008: 237-244.
[本文引用: 2]
[21]
YAZDANI A, IRAVANI R. Voltage sourced converters in power systems [M]. USA: Wiley Online Library, 2010: 155-172.
[本文引用: 3]
[22]
UTKIN V, GULDNER J, SHI J. Sliding mode control in electro mechanical systems [M]. USA: CRC Press, 2017: 378-388.
[本文引用: 3]
[23]
LIU J, WANG X. Advanced sliding mode control for mechanical systems [M]. Beijing: Springer, 2012: 137-152.
[本文引用: 1]
[24]
KUNDUR P, BALU N J, LAUBY M G. Power system stability and control [M]. USA: McGraw Hill New York, 1994: 689-721.
[本文引用: 2]
[25]
KAMWA I. Performance of three PSS for interarea oscillations [EB/OL]. [2021-02-01]. https://www.mathworks.com/help/physmod/sps/examples/performance-of-three-pss-for-interarea-oscillations.html.
[本文引用: 1]
[26]
LING Y, LI Y, XIANG J. Flexible generator: generation unit integrated by energy storage system and synchronous generator [J]. IEEE Transactions on Power Systems , 2020, 35(6): 42634271.
[本文引用: 2]
[27]
MOEINI A, KAMWA I, BRUNELLE P, et al. Open data IEEE test systems implemented in Sim power systems for education and research in power grid dynamics and control [C]// 2015 50th International Universities Power Engineering Conference (UPEC). United Kingdom: StokeonTrent, IEEE, 2015: 16.
[本文引用: 1]
双馈型风电集中接入对暂态功角稳定的影响分析
1
2016
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
双馈型风电集中接入对暂态功角稳定的影响分析
1
2016
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
Transient stability of power system integrated with doubly fed induction generator wind farms
1
2015
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
储能支撑光伏参与电网一次调频的优化控制策略研究
1
2021
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
储能支撑光伏参与电网一次调频的优化控制策略研究
1
2021
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
SMES-DFIG提高多机系统暂态功角稳定性的控制策略
1
2021
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
SMES-DFIG提高多机系统暂态功角稳定性的控制策略
1
2021
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
1
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
1
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
1
... 电力行业助力实现“双碳”目标的首要任务是推动能源低碳转型、构建以新能源为主体的新型电力系统,然而新能源的波动性给同步机之间的功角稳定带来不利影响[1 -2 ] . 通过实现四象限灵活调节和迅速响应,储能成为平抑新能源波动的主要手段,亦能够参与系统频率调节,增强系统稳定性[3 -4 ] . 在当前大电网中,传统同步发电机仍然是主要的发电单元,因其惯量大,抗扰能力强,可预见同步发电机发电与新能源发电将长期并存[5 -6 ] . 在一个含有储能与同步发电机的电力系统中,同步发电机的电磁功率与储能的有功功率在物理上具有耦合关系,即同步发电机与储能存在能量交互关系. 通过利用此能量交互,储能可以通过快速地调节自身释放或吸收的有功功率,快速地调整同步发电机的电磁功率,进而调整系统扰动后同步发电机的运行动态,最终提升电力系统的功角稳定性. 基于上述原理,诸多学者开展了提升电力系统功角稳定的源储互动(同步发电机储能互动)研究. ...
2
... Zhu等[7 ] 提出一种基于仿真的储能阻尼控制器优化策略,采用粒子群算法优化储能的安装位置以及储能阻尼控制器的参数. Farraj等[8 ] 基于参数反馈线性化,并通过设计储能的有功功率参考值,将非线性的耦合同步发电机动态转化成一个线性系统;基于此线性系统,设计一种分布式的储能控制器用以抑制同步发电机的转速振荡,以及提升电力系统的暂态(大扰动)功角稳定性. Farraj等[9 ] 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
... 选取3种不需要通信、也不需要同步发电机转子角反馈的储能控制器进行对比实验. 它们分别为:Farraj等[8 ] 提出的参数反馈线性化(parametric feedback linearization,PFL)控制器、Zhu等[7 ] 提出的功率振荡阻尼(power oscillation damping,POD)控制器以及Ling等[26 ] 提出的柔性控制器(flexible controller,FC). PFL的控制规律为: $P_i^{{\text{ref}}} = {P_{{\text{a,}}i}}+ K_{{\omega ,}i}^{{\text{PFL}}}({\omega_i} - 1)$ . POD的控制规律为: $P_i^{{\text{ref}}} = K_{{\omega,}i}^{{\text{POD}}}({\omega_i} - 1)$ . FC的控制规律为: $P_i^{{\text{ref}}} = K_{{{P,}}i}^{{\text{FC}}}({P_{{{{\rm{o}},}}i}} - {P_{{\text{m,}}i}})+K_{{\omega,}i}^{{\text{FC}}}({\omega_i} - 1)$ $ {P_{{\rm{o}},i}} $ $i$ $i$ $P_i^{{\text{ref}}}$ $i$ 26 ],即 $K_{{{P,}}i}^{{\text{FC}}} = 0.25,K_{{\omega,}i}^{{\text{FC}}} = 8$ . 所提控制器的 ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}}$ ${K_{{\omega,}i}} = K_{{\omega,}i}^{{\text{FC}}} = 8$ ${\alpha _i} = 10.00$ $ {\epsilon}_{i}=0.10 $ ${\gamma _i} = 1.50$ ${\mu _i} = 0.15$ ${T_{{\omega,}i}} = 1.00$ ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}} = K_{{\omega,}i}^{{\text{PFL}}} = K_{{\omega,}i}^{{\text{POD}}} = {K_{{\omega,}i}} = 8$ . ...
3
... Zhu等[7 ] 提出一种基于仿真的储能阻尼控制器优化策略,采用粒子群算法优化储能的安装位置以及储能阻尼控制器的参数. Farraj等[8 ] 基于参数反馈线性化,并通过设计储能的有功功率参考值,将非线性的耦合同步发电机动态转化成一个线性系统;基于此线性系统,设计一种分布式的储能控制器用以抑制同步发电机的转速振荡,以及提升电力系统的暂态(大扰动)功角稳定性. Farraj等[9 ] 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
... 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
... 选取3种不需要通信、也不需要同步发电机转子角反馈的储能控制器进行对比实验. 它们分别为:Farraj等[8 ] 提出的参数反馈线性化(parametric feedback linearization,PFL)控制器、Zhu等[7 ] 提出的功率振荡阻尼(power oscillation damping,POD)控制器以及Ling等[26 ] 提出的柔性控制器(flexible controller,FC). PFL的控制规律为: $P_i^{{\text{ref}}} = {P_{{\text{a,}}i}}+ K_{{\omega ,}i}^{{\text{PFL}}}({\omega_i} - 1)$ . POD的控制规律为: $P_i^{{\text{ref}}} = K_{{\omega,}i}^{{\text{POD}}}({\omega_i} - 1)$ . FC的控制规律为: $P_i^{{\text{ref}}} = K_{{{P,}}i}^{{\text{FC}}}({P_{{{{\rm{o}},}}i}} - {P_{{\text{m,}}i}})+K_{{\omega,}i}^{{\text{FC}}}({\omega_i} - 1)$ $ {P_{{\rm{o}},i}} $ $i$ $i$ $P_i^{{\text{ref}}}$ $i$ 26 ],即 $K_{{{P,}}i}^{{\text{FC}}} = 0.25,K_{{\omega,}i}^{{\text{FC}}} = 8$ . 所提控制器的 ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}}$ ${K_{{\omega,}i}} = K_{{\omega,}i}^{{\text{FC}}} = 8$ ${\alpha _i} = 10.00$ $ {\epsilon}_{i}=0.10 $ ${\gamma _i} = 1.50$ ${\mu _i} = 0.15$ ${T_{{\omega,}i}} = 1.00$ ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}} = K_{{\omega,}i}^{{\text{PFL}}} = K_{{\omega,}i}^{{\text{POD}}} = {K_{{\omega,}i}} = 8$ . ...
1
... Zhu等[7 ] 提出一种基于仿真的储能阻尼控制器优化策略,采用粒子群算法优化储能的安装位置以及储能阻尼控制器的参数. Farraj等[8 ] 基于参数反馈线性化,并通过设计储能的有功功率参考值,将非线性的耦合同步发电机动态转化成一个线性系统;基于此线性系统,设计一种分布式的储能控制器用以抑制同步发电机的转速振荡,以及提升电力系统的暂态(大扰动)功角稳定性. Farraj等[9 ] 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
1
... Zhu等[7 ] 提出一种基于仿真的储能阻尼控制器优化策略,采用粒子群算法优化储能的安装位置以及储能阻尼控制器的参数. Farraj等[8 ] 基于参数反馈线性化,并通过设计储能的有功功率参考值,将非线性的耦合同步发电机动态转化成一个线性系统;基于此线性系统,设计一种分布式的储能控制器用以抑制同步发电机的转速振荡,以及提升电力系统的暂态(大扰动)功角稳定性. Farraj等[9 ] 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
1
... Zhu等[7 ] 提出一种基于仿真的储能阻尼控制器优化策略,采用粒子群算法优化储能的安装位置以及储能阻尼控制器的参数. Farraj等[8 ] 基于参数反馈线性化,并通过设计储能的有功功率参考值,将非线性的耦合同步发电机动态转化成一个线性系统;基于此线性系统,设计一种分布式的储能控制器用以抑制同步发电机的转速振荡,以及提升电力系统的暂态(大扰动)功角稳定性. Farraj等[9 ] 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
1
... Zhu等[7 ] 提出一种基于仿真的储能阻尼控制器优化策略,采用粒子群算法优化储能的安装位置以及储能阻尼控制器的参数. Farraj等[8 ] 基于参数反馈线性化,并通过设计储能的有功功率参考值,将非线性的耦合同步发电机动态转化成一个线性系统;基于此线性系统,设计一种分布式的储能控制器用以抑制同步发电机的转速振荡,以及提升电力系统的暂态(大扰动)功角稳定性. Farraj等[9 ] 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
1
... Zhu等[7 ] 提出一种基于仿真的储能阻尼控制器优化策略,采用粒子群算法优化储能的安装位置以及储能阻尼控制器的参数. Farraj等[8 ] 基于参数反馈线性化,并通过设计储能的有功功率参考值,将非线性的耦合同步发电机动态转化成一个线性系统;基于此线性系统,设计一种分布式的储能控制器用以抑制同步发电机的转速振荡,以及提升电力系统的暂态(大扰动)功角稳定性. Farraj等[9 ] 进一步分析虚假数据注入攻击对文献[8 ]中分布式储能控制器的影响. 沿着参数反馈线性化的思路,Farraj等[10 ] 提出一种基于实时全局信息反馈的线性反馈最优控制器,用于增强电力系统的暂态(大扰动)功角稳定性. Ayar等[11 ] 提出一种考虑通信延时和信息物理系统干扰的分布式储能控制器. Lucia等[12 ] 考虑传感器的测量误差,提出一种基于模型预测控制的分布式储能控制器. Farraj等[13 ] 提出一种多智能体框架,用以应对储能的容量限制,以及传感器的测量误差和传输延迟. 然而,以上文献对于储能与同步发电机的能量交互并未进行详细的建模分析,均简单地假设由储能引起的同步发电机电磁功率增量完全等于储能所吸收的有功功率. 基于此假设,以上文献将原来耦合的同步发电机动态模型简化为一个线性系统,并在此线性系统上设计相应的储能控制器. ...
1
... 在实际电力系统中,系统运行状态受到随机干扰的影响且系统动态具有高度的非线性和不确定性. 为了有效地提升电力系统的功角稳定性,基于源储互动的储能控制器应具有较高的鲁棒性能. 滑模控制作为一种典型的鲁棒控制设计方法,能够较大程度地克服系统模型的不确定性,对系统干扰和未建模动态具有较强的鲁棒性. 在储能控制领域中,滑模控制已有诸多研究,这些工作主要集中在储能系统设备层面的滑模控制,用于提升储能自身的动态性能[14 -16 ] . 在提升电力系统功角稳定方面,Kanchanaharuthai等[17 ] 针对含一台储能的单机无穷大系统,提出一种基于反步滑模控制的储能控制器,用于增强系统的电压调整能力和暂态(大扰动) 功角稳定性. Ni等[18 ] 针对含一台储能、一台静止无功补偿器和一台同步发电机的电力系统,提出一种基于储能的固定时间终端滑模控制器. 在上述储能滑模控制器中,储能需要获取系统范围内的电力系统运行状态,诸如无穷大母线电压、输电线路阻抗等,这些状态在实际情况下常常是难以获取的. 同时,上述储能滑模控制器还需要同步发电机的转子角. 在实际电力系统中,同步发电机的转子角是难以测量且耗资昂贵的[19 ] . 上述储能滑模控制器仅考虑了单机系统中单台储能参与电力系统稳定控制的情况. 因此,在实际多机电力系统中,上述储能滑模控制器可能难以取得和单机系统相同的稳定控制效果. ...
1
... 在实际电力系统中,系统运行状态受到随机干扰的影响且系统动态具有高度的非线性和不确定性. 为了有效地提升电力系统的功角稳定性,基于源储互动的储能控制器应具有较高的鲁棒性能. 滑模控制作为一种典型的鲁棒控制设计方法,能够较大程度地克服系统模型的不确定性,对系统干扰和未建模动态具有较强的鲁棒性. 在储能控制领域中,滑模控制已有诸多研究,这些工作主要集中在储能系统设备层面的滑模控制,用于提升储能自身的动态性能[14 -16 ] . 在提升电力系统功角稳定方面,Kanchanaharuthai等[17 ] 针对含一台储能的单机无穷大系统,提出一种基于反步滑模控制的储能控制器,用于增强系统的电压调整能力和暂态(大扰动) 功角稳定性. Ni等[18 ] 针对含一台储能、一台静止无功补偿器和一台同步发电机的电力系统,提出一种基于储能的固定时间终端滑模控制器. 在上述储能滑模控制器中,储能需要获取系统范围内的电力系统运行状态,诸如无穷大母线电压、输电线路阻抗等,这些状态在实际情况下常常是难以获取的. 同时,上述储能滑模控制器还需要同步发电机的转子角. 在实际电力系统中,同步发电机的转子角是难以测量且耗资昂贵的[19 ] . 上述储能滑模控制器仅考虑了单机系统中单台储能参与电力系统稳定控制的情况. 因此,在实际多机电力系统中,上述储能滑模控制器可能难以取得和单机系统相同的稳定控制效果. ...
1
... 在实际电力系统中,系统运行状态受到随机干扰的影响且系统动态具有高度的非线性和不确定性. 为了有效地提升电力系统的功角稳定性,基于源储互动的储能控制器应具有较高的鲁棒性能. 滑模控制作为一种典型的鲁棒控制设计方法,能够较大程度地克服系统模型的不确定性,对系统干扰和未建模动态具有较强的鲁棒性. 在储能控制领域中,滑模控制已有诸多研究,这些工作主要集中在储能系统设备层面的滑模控制,用于提升储能自身的动态性能[14 -16 ] . 在提升电力系统功角稳定方面,Kanchanaharuthai等[17 ] 针对含一台储能的单机无穷大系统,提出一种基于反步滑模控制的储能控制器,用于增强系统的电压调整能力和暂态(大扰动) 功角稳定性. Ni等[18 ] 针对含一台储能、一台静止无功补偿器和一台同步发电机的电力系统,提出一种基于储能的固定时间终端滑模控制器. 在上述储能滑模控制器中,储能需要获取系统范围内的电力系统运行状态,诸如无穷大母线电压、输电线路阻抗等,这些状态在实际情况下常常是难以获取的. 同时,上述储能滑模控制器还需要同步发电机的转子角. 在实际电力系统中,同步发电机的转子角是难以测量且耗资昂贵的[19 ] . 上述储能滑模控制器仅考虑了单机系统中单台储能参与电力系统稳定控制的情况. 因此,在实际多机电力系统中,上述储能滑模控制器可能难以取得和单机系统相同的稳定控制效果. ...
1
... 在实际电力系统中,系统运行状态受到随机干扰的影响且系统动态具有高度的非线性和不确定性. 为了有效地提升电力系统的功角稳定性,基于源储互动的储能控制器应具有较高的鲁棒性能. 滑模控制作为一种典型的鲁棒控制设计方法,能够较大程度地克服系统模型的不确定性,对系统干扰和未建模动态具有较强的鲁棒性. 在储能控制领域中,滑模控制已有诸多研究,这些工作主要集中在储能系统设备层面的滑模控制,用于提升储能自身的动态性能[14 -16 ] . 在提升电力系统功角稳定方面,Kanchanaharuthai等[17 ] 针对含一台储能的单机无穷大系统,提出一种基于反步滑模控制的储能控制器,用于增强系统的电压调整能力和暂态(大扰动) 功角稳定性. Ni等[18 ] 针对含一台储能、一台静止无功补偿器和一台同步发电机的电力系统,提出一种基于储能的固定时间终端滑模控制器. 在上述储能滑模控制器中,储能需要获取系统范围内的电力系统运行状态,诸如无穷大母线电压、输电线路阻抗等,这些状态在实际情况下常常是难以获取的. 同时,上述储能滑模控制器还需要同步发电机的转子角. 在实际电力系统中,同步发电机的转子角是难以测量且耗资昂贵的[19 ] . 上述储能滑模控制器仅考虑了单机系统中单台储能参与电力系统稳定控制的情况. 因此,在实际多机电力系统中,上述储能滑模控制器可能难以取得和单机系统相同的稳定控制效果. ...
1
... 在实际电力系统中,系统运行状态受到随机干扰的影响且系统动态具有高度的非线性和不确定性. 为了有效地提升电力系统的功角稳定性,基于源储互动的储能控制器应具有较高的鲁棒性能. 滑模控制作为一种典型的鲁棒控制设计方法,能够较大程度地克服系统模型的不确定性,对系统干扰和未建模动态具有较强的鲁棒性. 在储能控制领域中,滑模控制已有诸多研究,这些工作主要集中在储能系统设备层面的滑模控制,用于提升储能自身的动态性能[14 -16 ] . 在提升电力系统功角稳定方面,Kanchanaharuthai等[17 ] 针对含一台储能的单机无穷大系统,提出一种基于反步滑模控制的储能控制器,用于增强系统的电压调整能力和暂态(大扰动) 功角稳定性. Ni等[18 ] 针对含一台储能、一台静止无功补偿器和一台同步发电机的电力系统,提出一种基于储能的固定时间终端滑模控制器. 在上述储能滑模控制器中,储能需要获取系统范围内的电力系统运行状态,诸如无穷大母线电压、输电线路阻抗等,这些状态在实际情况下常常是难以获取的. 同时,上述储能滑模控制器还需要同步发电机的转子角. 在实际电力系统中,同步发电机的转子角是难以测量且耗资昂贵的[19 ] . 上述储能滑模控制器仅考虑了单机系统中单台储能参与电力系统稳定控制的情况. 因此,在实际多机电力系统中,上述储能滑模控制器可能难以取得和单机系统相同的稳定控制效果. ...
2
... 在实际电力系统中,系统运行状态受到随机干扰的影响且系统动态具有高度的非线性和不确定性. 为了有效地提升电力系统的功角稳定性,基于源储互动的储能控制器应具有较高的鲁棒性能. 滑模控制作为一种典型的鲁棒控制设计方法,能够较大程度地克服系统模型的不确定性,对系统干扰和未建模动态具有较强的鲁棒性. 在储能控制领域中,滑模控制已有诸多研究,这些工作主要集中在储能系统设备层面的滑模控制,用于提升储能自身的动态性能[14 -16 ] . 在提升电力系统功角稳定方面,Kanchanaharuthai等[17 ] 针对含一台储能的单机无穷大系统,提出一种基于反步滑模控制的储能控制器,用于增强系统的电压调整能力和暂态(大扰动) 功角稳定性. Ni等[18 ] 针对含一台储能、一台静止无功补偿器和一台同步发电机的电力系统,提出一种基于储能的固定时间终端滑模控制器. 在上述储能滑模控制器中,储能需要获取系统范围内的电力系统运行状态,诸如无穷大母线电压、输电线路阻抗等,这些状态在实际情况下常常是难以获取的. 同时,上述储能滑模控制器还需要同步发电机的转子角. 在实际电力系统中,同步发电机的转子角是难以测量且耗资昂贵的[19 ] . 上述储能滑模控制器仅考虑了单机系统中单台储能参与电力系统稳定控制的情况. 因此,在实际多机电力系统中,上述储能滑模控制器可能难以取得和单机系统相同的稳定控制效果. ...
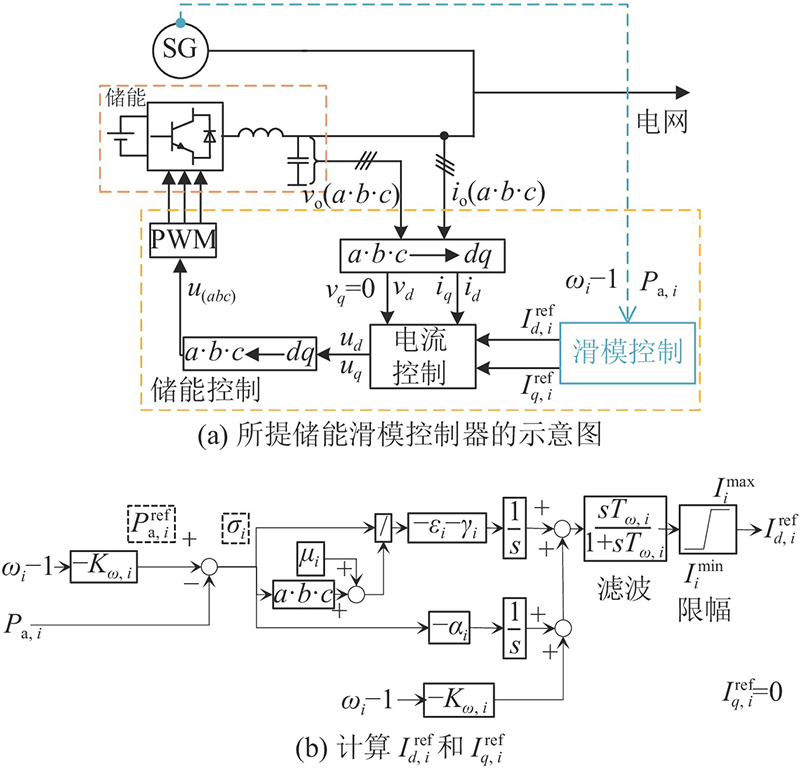
... 图3 直观地展示所提控制同步发电机加速功率的储能滑模控制器. 如图3 (a)所示,储能仅需要测量本地同步发电机的加速功率 ${P_{{\text{a,}}i}}$ $ {\omega_i} - 1 $ 图3 (b)中的滑模控制规律计算出储能的有功/无功电流参考值( $I_{{{d,}}i}^{{\text{ref}}}$ $I_{{{q,}}i}^{{\text{ref}}}$ ${P_{{\text{a,}}i}}$ $ {\omega_i} - 1 $ ) ,并且不需要难以测量的同步发电机转子角[19 ] . 类似于电力系统稳定器[24 ] ,图3 (b)中的滤波环节 ${{s{T_{{{\omega,}}i}}} \mathord{\left/ {\vphantom {{s{T_{{{\omega,}}i}}} {1+s{T_{{{\omega,}}i}}}}} \right. } {(1+s{T_{{{\omega,}}i}})}}$ ${P_{{\text{a,}}i}}$ $ {\omega_i} - 1 $ $ {T_{{{\omega,}}i}} $ [24 ] . 图3 (b)中的限幅环节是为了防止储能的过流运行. ...
2
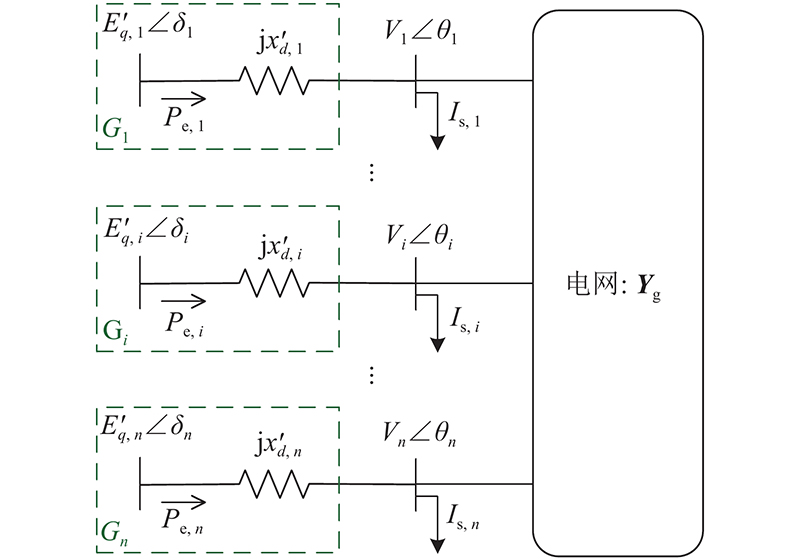
... 考虑具有n 台同步发电机的多机电力系统,在标幺制下的同步发电机模型[20 ] 为 ...
... 式中:下标 $i$ $i$ ${\delta _i}$ ${\omega _i}$ ${\omega _{\text{0}}}$ ${H_i}$ ${D_i}$ ${P_{{\rm{a}},i}}$ ${P_{{\text{a,}}i}} = {P_{{\rm{m}}{\text{,}}i}} - {P_{{\text{e,}}i}}$ ${P_{{\text{m,}}i}}$ [20 ] ; ${P_{{\text{e,}}i}}$
3
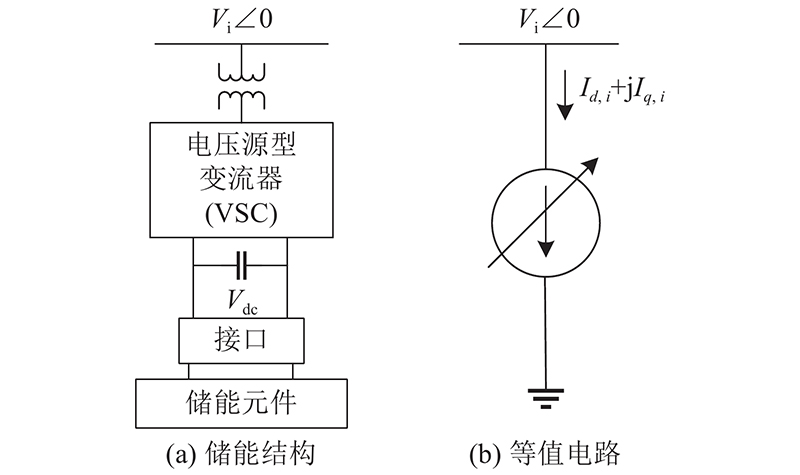
... ${P_i}$ ${Q_i}$ d 轴电流 $ {I_{{{d,}}i}} $ q 轴电流 $ {I_{{{q,}}i}} $ $ {I_{{{d,}}i}}$ $ {I_{{{q,}}i}} $ d 轴和q 轴电流, $ {I_{{{d,}}i}} $ $ {I_{{{q,}}i}} $ $ {I_{{{d,}}i}} $ $ {I_{{{q,}}i}} $ [21 ] 为 ...
... 式中: $I_{{{d,}}i}^{{\text{ref}}}(s)$ $ I_{{{q,}}i}^{{\text{ref}}}(s) $ ${\tau _i}$ [21 ] . ...
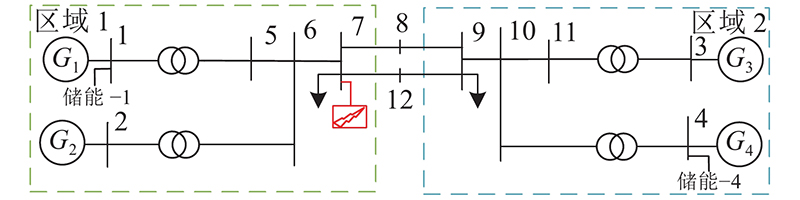
... 在仿真中, ${G_1}$ ${G_4}$ 图4 中储能−1和储能−4). 2台储能的标幺系统均采用与最邻近同步发电机相同的基准值,即均为最邻近同步发电机的额定值. ${G_1}$ ${G_4}$ ${G_1}$ ${G_4}$ $ {P_{{\text{m1}}}} = {P_{{\text{m4}}}} = 0.78 $ $\Sigma _{i = 1}^4{P_{{\text{m},}i}} = 3.13$ ${G_1}$ ${G_4}$ 21 ],储能的电流响应时间一般为0.5~5.0 ms. 为了更保守地考虑响应时间对控制的影响,选取时间常数的最大值5.0 ms进行仿真分析,确保在其他的时间常数情况下,能够保证仿真的稳定和较好的控制效果. 因此,储能的电流响应时间均为 ${\tau _i} = 5.0$
3
... 式中: $ {K_{{{\omega,}}i}} $ ${\sigma _i} = 0$ [22 ] 时, $ {P_{{\text{a,}}i}} $ $ {P_{{\text{a,}}i}} = - {K_{{{\omega,}}i}}\left( {{\omega_i} - 1} \right) $ $i$
... 由式(27)可知,当同步发电机被强迫在滑模面上运动时,同步发电机的动态仅与自身状态量有关而不受其他同步发电机的影响,实现了强迫控制解耦. 在滑模面上,第 $i$ ${\omega _i}$ ${\omega _i} = 1.0$ . 为实现滑模运动, ${\sigma _i}$ ${\sigma _i}$ [22 ] : ...
... 为了削弱滑模控制中的抖振现象,采用如下非线性的光滑函数去近似式(40)中的符号函数[22 ] : ...
1
... 式(29)中的 ${f_i}({\sigma _i})$ ${\sigma _i}$ ${\alpha _i}{\sigma _i}$ ( 对应于 ${\sigma _i}$ ${\alpha _i}\sigma _i^{{{{p_i}} \mathord{\left/ {\vphantom {{{p_i}} {{q_i}}}} \right. } {{q_i}}}}$ ( 对应于 ${\sigma _i}$ ${\alpha _i} > 0$ ${p_i}$ ${q_i}$ [23 ] . 选取 ${f_i}({\sigma _i})$
2
... 图3 直观地展示所提控制同步发电机加速功率的储能滑模控制器. 如图3 (a)所示,储能仅需要测量本地同步发电机的加速功率 ${P_{{\text{a,}}i}}$ $ {\omega_i} - 1 $ 图3 (b)中的滑模控制规律计算出储能的有功/无功电流参考值( $I_{{{d,}}i}^{{\text{ref}}}$ $I_{{{q,}}i}^{{\text{ref}}}$ ${P_{{\text{a,}}i}}$ $ {\omega_i} - 1 $ ) ,并且不需要难以测量的同步发电机转子角[19 ] . 类似于电力系统稳定器[24 ] ,图3 (b)中的滤波环节 ${{s{T_{{{\omega,}}i}}} \mathord{\left/ {\vphantom {{s{T_{{{\omega,}}i}}} {1+s{T_{{{\omega,}}i}}}}} \right. } {(1+s{T_{{{\omega,}}i}})}}$ ${P_{{\text{a,}}i}}$ $ {\omega_i} - 1 $ $ {T_{{{\omega,}}i}} $ [24 ] . 图3 (b)中的限幅环节是为了防止储能的过流运行. ...
... [24 ]. 图3 (b)中的限幅环节是为了防止储能的过流运行. ...
1
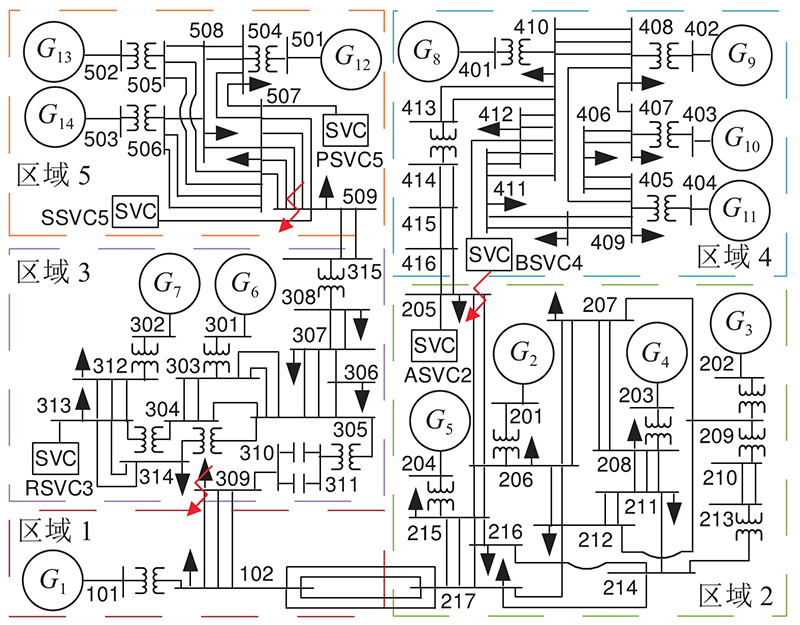
... 如图4 所示,本小节采用四机两区域系统进行仿真分析. 系统仿真模型与运行数据(包括同步发电机、调速器、自动电压调节器、励磁系统、负荷、电力网络参数以及潮流数据等)下载自文献[25 ]. 在所有仿真测试中,系统初始运行于稳态. ...
2
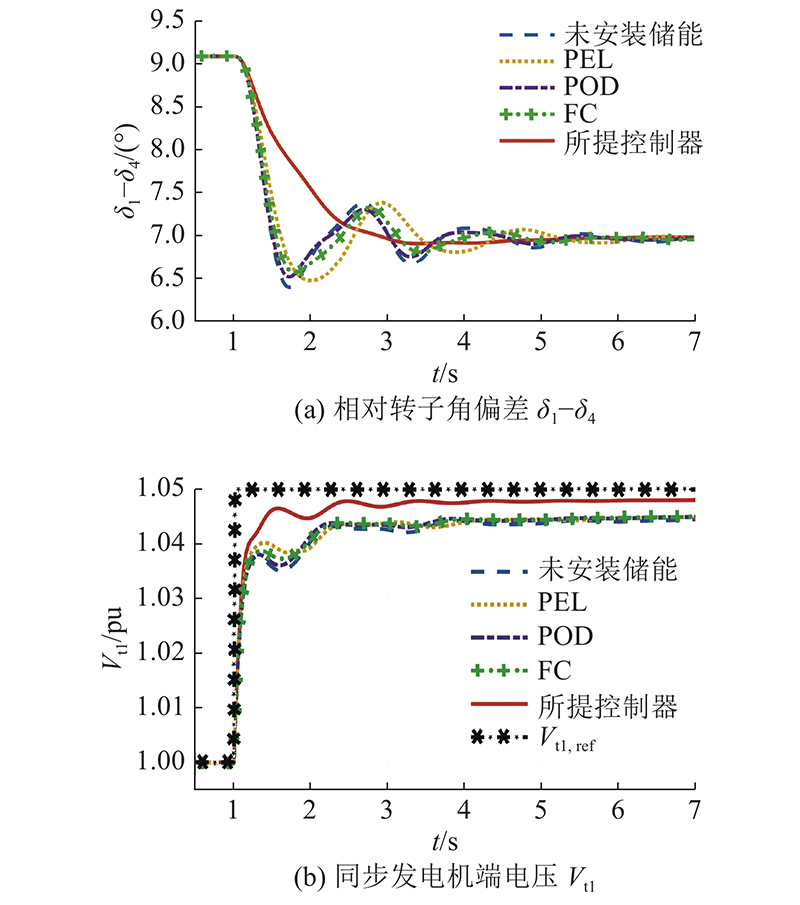
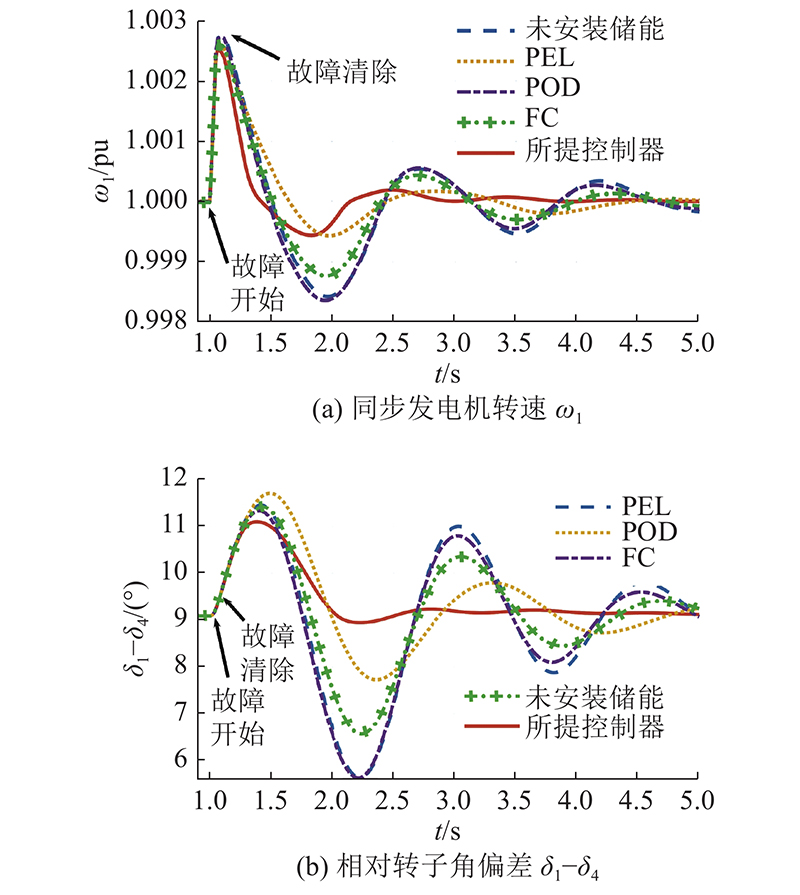
... 选取3种不需要通信、也不需要同步发电机转子角反馈的储能控制器进行对比实验. 它们分别为:Farraj等[8 ] 提出的参数反馈线性化(parametric feedback linearization,PFL)控制器、Zhu等[7 ] 提出的功率振荡阻尼(power oscillation damping,POD)控制器以及Ling等[26 ] 提出的柔性控制器(flexible controller,FC). PFL的控制规律为: $P_i^{{\text{ref}}} = {P_{{\text{a,}}i}}+ K_{{\omega ,}i}^{{\text{PFL}}}({\omega_i} - 1)$ . POD的控制规律为: $P_i^{{\text{ref}}} = K_{{\omega,}i}^{{\text{POD}}}({\omega_i} - 1)$ . FC的控制规律为: $P_i^{{\text{ref}}} = K_{{{P,}}i}^{{\text{FC}}}({P_{{{{\rm{o}},}}i}} - {P_{{\text{m,}}i}})+K_{{\omega,}i}^{{\text{FC}}}({\omega_i} - 1)$ $ {P_{{\rm{o}},i}} $ $i$ $i$ $P_i^{{\text{ref}}}$ $i$ 26 ],即 $K_{{{P,}}i}^{{\text{FC}}} = 0.25,K_{{\omega,}i}^{{\text{FC}}} = 8$ . 所提控制器的 ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}}$ ${K_{{\omega,}i}} = K_{{\omega,}i}^{{\text{FC}}} = 8$ ${\alpha _i} = 10.00$ $ {\epsilon}_{i}=0.10 $ ${\gamma _i} = 1.50$ ${\mu _i} = 0.15$ ${T_{{\omega,}i}} = 1.00$ ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}} = K_{{\omega,}i}^{{\text{PFL}}} = K_{{\omega,}i}^{{\text{POD}}} = {K_{{\omega,}i}} = 8$ . ...
... 台储能所吸收的有功功率参考值. FC的参数直接来源于文献[26 ],即 $K_{{{P,}}i}^{{\text{FC}}} = 0.25,K_{{\omega,}i}^{{\text{FC}}} = 8$ . 所提控制器的 ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}}$ ${K_{{\omega,}i}} = K_{{\omega,}i}^{{\text{FC}}} = 8$ ${\alpha _i} = 10.00$ $ {\epsilon}_{i}=0.10 $ ${\gamma _i} = 1.50$ ${\mu _i} = 0.15$ ${T_{{\omega,}i}} = 1.00$ ${K_{{\omega,}i}}$ $K_{{\omega,}i}^{{\text{FC}}} = K_{{\omega,}i}^{{\text{PFL}}} = K_{{\omega,}i}^{{\text{POD}}} = {K_{{\omega,}i}} = 8$ . ...
1
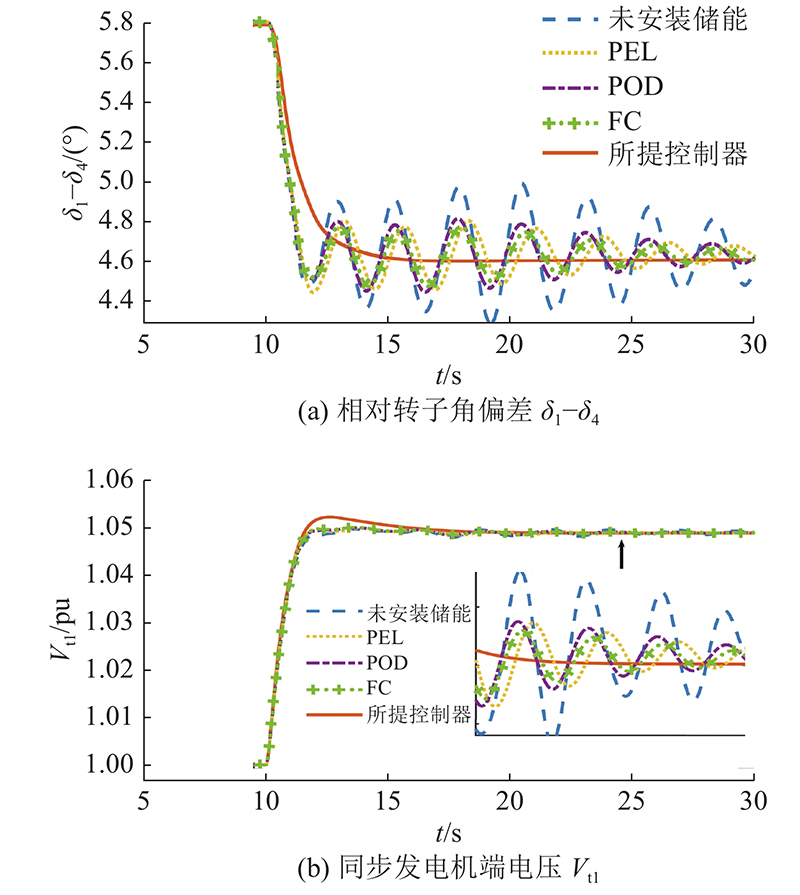
... 在如图7 所示14机59节点的复杂系统中,进行所提控制策略的仿真分析,系统仿真模型与运行数据(包括同步发电机、调速器、自动电压调节器、励磁系统、负荷、电力网络参数以及潮流数据等)下载自文献[27 ]. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}