设故障分类器的特征值输入为 $\boldsymbol{y}=\left[{y}_{1},{y}_{2},\cdots , {y}_{l}\right]$ $\boldsymbol{x}=\left[{x}_{1},{x}_{2},\cdots ,{x}_{n}\right]$ $ l $ $ n $ $ \boldsymbol{x} $ $ \mathrm{s}\mathrm{o}\mathrm{f}\mathrm{t}\mathrm{m}\mathrm{a}\mathrm{x} $ $ \mathrm{s}\mathrm{i}\mathrm{g}\mathrm{m}\mathrm{o}\mathrm{i}\mathrm{d} $ $ {y}_{i} $
式中: ${\boldsymbol{W}}_{\boldsymbol{k}}\in {\mathbf{R}}^{d},\boldsymbol{W}={[{W}_{1},\cdots ,{W}_{\boldsymbol{k}}]}^{\rm{T}}\in {\mathbf{R}}^{K\times d}$ $\boldsymbol{b}_{k}\in \mathbf{R},\;\boldsymbol{b}= {[{b}_{1}, \cdots ,{b}_{K}]}^{{\rm{T}}}\in {\mathbf{R}}^{K}$ $ \boldsymbol{p}={[{p}_{1},\cdots ,{p}_{K}]}^{\mathrm{T}}\in {\mathbf{R}}^{K} $ $ K $
[1]
乔美英, 汤夏夏, 闫书豪, 等 基于改进稀疏滤波与深度网络融合的轴承故障诊断
[J]. 浙江大学学报: 工学版 , 2020 , 54 (12 ): 2301 - 2309
[本文引用: 1]
QIAO Mei-ying, TANG Xia-xia, YAN Shu-hao, et al Bearing fault diagnosis based on improved sparse filter and deep network fusion
[J]. Journal of Zhejiang University: Engineering Science , 2020 , 54 (12 ): 2301 - 2309
[本文引用: 1]
[2]
FENG Z, GAO A, LI K, et al Planetary gearbox fault diagnosis via rotary encoder signal analysis
[J]. Mechanical Systems and Signal Processing , 2021 , 149 : 107325
DOI:10.1016/j.ymssp.2020.107325
[3]
XIA P, HUANG Y, XIAO D, et al. Ball screw health indicator construction with limited monitoring data and health assessment based on global context network[C]// 2021 IEEE International Conference on Sensing, Diagnostics, Prognostics and Control (SDPC) . Weihai: IEEE, 2021: 168-173.
[本文引用: 1]
[4]
姚锡凡, 景轩, 张剑铭, 等 走向新工业革命的智能制造
[J]. 计算机集成制造系统 , 2020 , 26 (9 ): 2299 - 2320
[本文引用: 1]
YAO Xi-fan, JING Xuan, ZHANG Jian-ming, et al Towarads smart manufacturing for new industrial revolution
[J]. Computer Integrated Manufacturing Systems , 2020 , 26 (9 ): 2299 - 2320
[本文引用: 1]
[5]
李杰, 李响, 许元铭, 等 工业人工智能及应用研究现状及展望
[J]. 自动化学报 , 2020 , 46 (10 ): 2031 - 2044
DOI:10.16383/j.aas.200501
[本文引用: 1]
LI Jie, LI Xiang, XU Yuan-ming, et al Recent advances and prospects in industrial AI and applications
[J]. Acta Automatica Sinica , 2020 , 46 (10 ): 2031 - 2044
DOI:10.16383/j.aas.200501
[本文引用: 1]
[6]
吴守军, 冯辅周, 吴春志, 等 复合行星轮系故障诊断方法研究进展
[J]. 机械科学与技术 , 2019 , 38 (12 ): 1910 - 1920
[本文引用: 2]
WU Shou-jun, FENG Fu-zhou, WU Chun-zhi, et al Research progress on fault diagnosis methods of compound planetary gear train
[J]. Mechanical Science and Technology for Aerospace Engineering , 2019 , 38 (12 ): 1910 - 1920
[本文引用: 2]
[7]
LI G, LIANG X, FANGYI L Model-based analysis and fault diagnosis of a compound planetary gear set with damaged sun gear
[J]. Journal of Mechanical Science and Technology , 2018 , 32 : 3081 - 3096
DOI:10.1007/s12206-018-0611-0
[本文引用: 1]
[9]
陈仁祥, 唐林林, 孙健, 等. 一维深度子领域适配的不同转速下旋转机械复合故障诊断[J]. 仪器仪表学报, 2021, 42(5): 227-234.
[本文引用: 2]
CHEN Ren-xiang, TANG Lin-lin, SUN Jian, et al. Composite fault diagnosis of rotating machinery under different speed based on one dimensional deep subdomain adaption [J]. Chinese Journal of Scientific Instrument . 2021, 42(5): 227-234.
[本文引用: 2]
[10]
HUANG R, LI W, CUI L. An intelligent compound fault diagnosis method using one-dimensional deep convolutional neural network with multi-label classifier [C]// 2019 IEEE International Instrumentation and Measurement Technology Conference (i2mtc) . New York: IEEE. 2019: 97-102.
[本文引用: 1]
[11]
HUANG R, LI J, LI W, et al Deep ensemble capsule network for intelligent compound fault diagnosis using multisensory data
[J]. IEEE Transactions on Instrumentation and Measurement , 2020 , 69 (5 ): 2304 - 2314
DOI:10.1109/TIM.2019.2958010
[本文引用: 2]
[12]
JIN Y, QIN C, HUANG Y, et al Actual bearing compound fault diagnosis based on active learning and decoupling attentional residual network
[J]. Measurement , 2021 , 173 : 108500
DOI:10.1016/j.measurement.2020.108500
[本文引用: 1]
[13]
LIANG P, DENG C, WU J, et al Compound fault diagnosis of gearboxes via multi-label convolutional neural network and wavelet transform
[J]. Computers in Industry , 2019 , 113 : 103132
DOI:10.1016/j.compind.2019.103132
[本文引用: 3]
[14]
ZHANG J, ZHANG Q, HE X, et al Compound fault diagnosis of rotating machinery: a fused imbalance learning method
[J]. IEEE Transactions on Control Systems Technology , 2021 , 29 (4 ): 1462 - 1474
DOI:10.1109/TCST.2020.3015514
[本文引用: 1]
[15]
齐咏生, 刘飞, 李永亭, 等 基于MK-MOMEDA和Teager能量算子的风电机组滚动轴承复合故障诊断
[J]. 太阳能学报 , 2021 , 42 (7 ): 297 - 307
DOI:10.19912/j.0254-0096.tynxb.2019-0276
[本文引用: 1]
QI Yong-sheng, LIU Fei, LI Yong-ting, et al Compound fault diagnosis of wind turbine rolling bearing based on MK-MOMEDA and teager energy operator
[J]. Journal of Solar Energy , 2021 , 42 (7 ): 297 - 307
DOI:10.19912/j.0254-0096.tynxb.2019-0276
[本文引用: 1]
[16]
杜丽君, 丁康, 蒋飞 基于变速工况稀疏调频字典的齿轮复合故障诊断
[J]. 重庆理工大学学报: 自然科学版 , 2021 , 35 (9 ): 92 - 102
[本文引用: 1]
DU Li-jun, DING Kang, JIANG Fei Gear compound faults diagnosis based on sparse frequency modulation dictionary under variable speed
[J]. Journal of Chongqing University of Technology: Natual Science , 2021 , 35 (9 ): 92 - 102
[本文引用: 1]
[17]
DIBAJ A, ETTEFAGH M M, HASSANNEJAD R, et al A hybrid fine-tuned VMD and CNN scheme for untrained compound fault diagnosis of rotating machinery with unequal-severity faults
[J]. Expert Systems with Applications , 2021 , 167 : 114094
DOI:10.1016/j.eswa.2020.114094
[本文引用: 1]
[18]
LIU S, ZHANG L, YANG X, et al. Query2Label: a simple transformer way to multi-label classification [EB/OL]. [2022-07-01]. https://doi.org//0.48550/arXiv.2017.10834.
[本文引用: 1]
[19]
卢昱奇. 基于卷积神经网络的行星齿轮箱复合故障诊断方法研究[D]. 电子科技大学, 2020: 1-20.
[本文引用: 1]
LU Yu-qi. Research on Compound Fault Diagnosis Method of Planetary Gearbox Based on Convolutional Neural Network [D]. University of Electronic Science and Technology of China, 2020: 1-20.
[本文引用: 1]
[20]
VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need [C]// Advances in Neural Information Processing Systems 30 (nips 2017) . La Jolla: NIPS, 2017: 6000-6010.
[本文引用: 2]
[21]
HAN K, WANG Y, CHEN H, et al A survey on vision transformer
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2023 , 45 (1 ): 87 - 110
[本文引用: 1]
[22]
CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with transformers [C]// Computer Vision – ECCV 2020 . Cham: SIP, 2020: 213-229.
[本文引用: 1]
[23]
HUANG R, LIAO Y, ZHANG S, et al Deep decoupling convolutional neural network for intelligent compound fault diagnosis
[J]. IEEE Access , 2019 , 7 : 1848 - 1858
DOI:10.1109/ACCESS.2018.2886343
[本文引用: 1]
基于改进稀疏滤波与深度网络融合的轴承故障诊断
1
2020
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
基于改进稀疏滤波与深度网络融合的轴承故障诊断
1
2020
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
Planetary gearbox fault diagnosis via rotary encoder signal analysis
0
2021
1
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
走向新工业革命的智能制造
1
2020
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
走向新工业革命的智能制造
1
2020
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
工业人工智能及应用研究现状及展望
1
2020
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
工业人工智能及应用研究现状及展望
1
2020
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
复合行星轮系故障诊断方法研究进展
2
2019
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
复合行星轮系故障诊断方法研究进展
2
2019
... 在故障诊断领域,目前主要研究集中在单一部件的单一故障类型的故障诊断,如对轴承和齿轮的故障诊断方法[1 -3 ] . 在实际工程环境中,机械系统不同的零部件是高度耦合运行的,往往会发生一个部件上多处故障、多个部件同时故障等多种复合故障的情况[4 -5 ] . 针对单个部件及单一故障类型的诊断模型易受到环境噪声、传递路径等因素影响,模型准确度会极大地降低[6 ] . 以振动信号为例,当复合故障出现时,不同故障之间会互相影响,使得采集到的振动信息不再是不同故障状态下振动信息的简单叠加,会出现谐振等复杂现象,复合故障诊断更为复杂和困难. 因此需要考虑故障解耦方法,即输出复合故障为内部单一故障组合. 若是不对复合故障进行解耦分析,将导致故障分析粒度含糊、解释性差,不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. ...
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
Model-based analysis and fault diagnosis of a compound planetary gear set with damaged sun gear
1
2018
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
Application of improved MCKD method based on QGA in planetary gear compound fault diagnosis
1
2019
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
2
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
2
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
1
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
Deep ensemble capsule network for intelligent compound fault diagnosis using multisensory data
2
2020
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
Actual bearing compound fault diagnosis based on active learning and decoupling attentional residual network
1
2021
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
Compound fault diagnosis of gearboxes via multi-label convolutional neural network and wavelet transform
3
2019
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
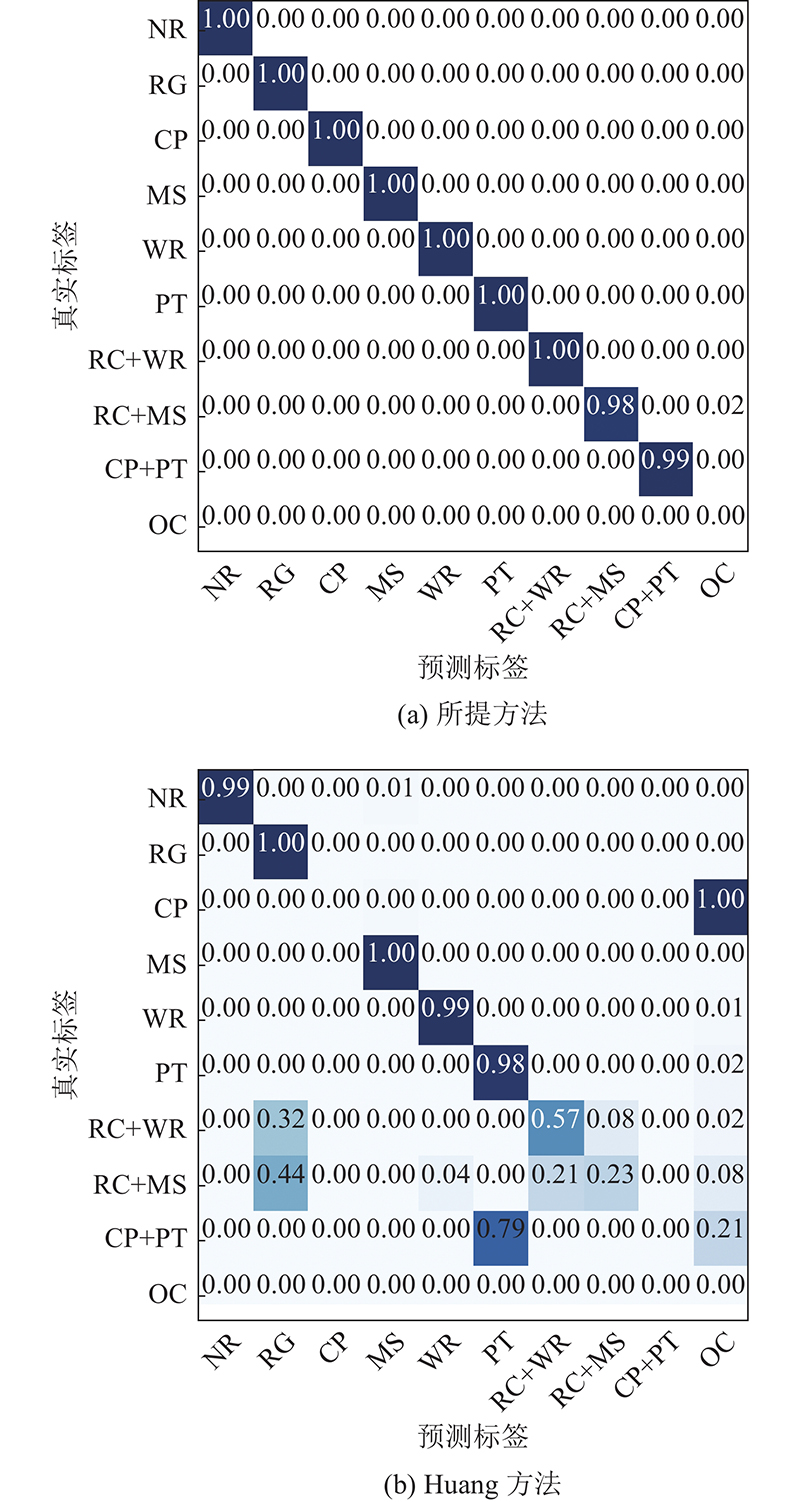
... 为了更好地模拟实际工业环境,将在训练样本中仅含少量单一故障样本数据和极少量复合故障样本数据的情况下,研究所提方法的故障诊断性能. 为了验证所提方法的诊断效果,对比当前2种广受认可的复合故障诊断算法,下文简称这2种方法为Huang[23 ] 和Liang[13 ] 方法. Huang方法使用一维深度卷积神经网络对振动信号进行特征提取,进一步使用多栈式胶囊作为故障解耦分类器进行故障诊断. Liang方法先通过小波变换对振动信号进行处理得到二维时频图,进一步将时频图输入到多标签神经网络进行复合故障分类. 将提出的基于改进Transformer的故障解耦分类器更换为一般的故障解耦分类器,即将特征提取模块的结果直接输入到一维的全连接层,并使用sigmoid函数作为故障概率输出(该方法下文简称STFT-CNN方法),与所提方法进行对比. 考虑到公平性,上述4种方法在训练和测试的过程中均使用相同的数据集. 在训练集方面,对于单一故障类型,每种故障选择200个样本作为训练集;对于复合故障类型,从0~30个逐步增加作为训练集,训练集中样本的选择为随机过程. 为了避免偶然性,针对训练集中各个单一故障和复合故障比例情况,每种情况重复10次(包括随机选择样本作为训练集、模型训练与测试),取10次的测试结果的平均值为最终的诊断准确度. 4种方法的学习率均设为0.001,训练轮数为50,选择Adam作为优化器. 4种方法在不同复合故障样本数训练下的诊断准确度结果如图8 所示. 在不同情况下训练集中的单一故障样本数量是相同的,因此随训练集中复合故障样本数量的变化,单一故障的诊断准确度变化不大(均为98%以上),图8 仅绘制不同情况下复合故障诊断的准确度,其中 ${N}_{\mathrm{0}}$ $ \mathrm{A}\mathrm{C}\mathrm{C} $
Compound fault diagnosis of rotating machinery: a fused imbalance learning method
1
2021
... 目前常见的复合故障诊断大致可以分为2类,一类是基于经验和模型的,另一类是基于数据驱动的. 前者一般利用信号处理的方法和一定的先验知识进行定性分析. Li等[7 ] 在基于模型方法研究下复合行星齿轮组的太阳轮故障的特性,建立一个三维块状参数非线性动态模型,用来进行故障分析. Lyu等[8 ] 基于量子遗传算法改进最大相关峰度解卷积方法,处理轴承和齿轮的复合故障信号,与功率谱和包络谱分析结果对比,提出的方法在复合故障分析上具有良好的效果. 随着机械设备实际运行的负载、工况条件越来越复杂,传统的基于模型和经验的分析很难全面覆盖到所有情况,建模复杂度和计算量将指数倍增,难以应用于实际工况环境中,而基于数据驱动的复合故障诊断则可以很好地解决这个问题. 陈仁祥等[9 ] 利用一维卷积神经网络和领域自适应学习单一故障和复合故障中的特征,以实现对旋转机械的复合故障. Huang等[10 -11 ] 最早将深度学习的思想引入到轴承和齿轮的复合故障诊断中,并利用多个传感器的数据和多个预训练模型实现较高准确度的复合故障诊断. Jin等[12 ] 使用解耦注意力残差网络进行轴承的复合故障诊断,并引入主动学习的概念. 吴守军[6 ] 使用一维深度卷积神经网络进行齿轮箱的复合故障诊断,在一定量复合故障数据的前提下,可以实现良好的诊断效果. Liang等[13 ] 用小波变换处理原始振动信号,进一步将小波变换图像结果传递给多标签神经网络进行分类,通过同时训练单一故障数据和复合故障数据,实现较高的故障诊断准确率. Zhang等[14 ] 提出一种混合不平衡学习方法,用以解决复合故障数据量与单个故障数据量不平衡的问题. ...
基于MK-MOMEDA和Teager能量算子的风电机组滚动轴承复合故障诊断
1
2021
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
基于MK-MOMEDA和Teager能量算子的风电机组滚动轴承复合故障诊断
1
2021
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
基于变速工况稀疏调频字典的齿轮复合故障诊断
1
2021
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
基于变速工况稀疏调频字典的齿轮复合故障诊断
1
2021
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
A hybrid fine-tuned VMD and CNN scheme for untrained compound fault diagnosis of rotating machinery with unequal-severity faults
1
2021
... 上述常见的复合故障诊断算法仍然存在一定局限性,原因有以下几个方面:1)绝大多数故障诊断方法[9 , 15 -16 ] 仅仅将复合故障简单等同于一种新的单一故障类型,没有充分考虑复合故障和组成复合故障多个单一故障之间的关系,并且故障分析粒度含糊、解释性差. 不利于机械设备按不同单一故障制定针对性的运维措施以及设备的再设计. 因此,需考虑故障解耦的方法,即输出复合故障作为内部单一故障的组合. 2)基于数据驱动的复合故障诊断方法具有不错的诊断效果,但是大部分都需要大量的单一故障数据和一定的复合故障做预训练[11 -13 ] ,有些方法甚至需要多传感器数据,在实际工业环境中往往难以获得大量的故障数据[17 ] .针对以上所述的问题,提出了一种基于改进Transformer的复合故障解耦诊断方法,可以在一定量单一故障数据和极少量复合故障数据样本情况下实现较高的故障诊断准确度. ...
1
... 1)Liu等[18 ] 将Transformer应用于图像的多标签分类,进一步验证Transformer中多头注意力机制的有效性. 因此本研究引入Transformer的解码器以及提出一种新型的故障解耦分类器. 与传统诊断方法中视复合故障为与单一故障毫无关联的新故障类型不同,故障解耦则充分考虑了复合故障和单一故障之间的联系; ...
1
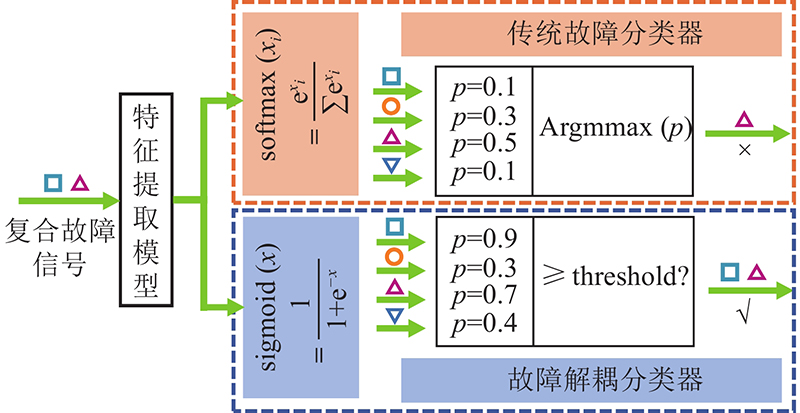
... 传统的故障分类器和故障解耦分类器的直观区别在于分类器一次输出的标签个数. 如图1 所示,上侧部分即为传统故障分类器的模型,下侧部分即为故障解耦分类器的模型. 2种分类器的输入均为特征提取得到的特征值,传统分类器仅能输出一个故障标签,故障解耦分类器则可一次输出多个标签. 当面对复合故障时,由于传统分类器仅能输出一个标签,将复合故障视为一种新的故障类型[19 ] ,无法充分利用复合故障与单一故障之间的联系(标签与标签之间都为独立). 故障解耦分类器将复合故障解耦输出成多个单一故障的组合,用多个单一故障的标签组合来代表复合故障,充分表达出复合故障与单一故障之间的关系. 如图1 下侧部分所示,用几个已知的单一故障标签即可排列组合表示出所有可能的复合故障情况. 一般的传统故障分类器是通过softmax函数实现的,而一般的故障解耦分类器是通过sigmoid函数实现的. ...
1
... 传统的故障分类器和故障解耦分类器的直观区别在于分类器一次输出的标签个数. 如图1 所示,上侧部分即为传统故障分类器的模型,下侧部分即为故障解耦分类器的模型. 2种分类器的输入均为特征提取得到的特征值,传统分类器仅能输出一个故障标签,故障解耦分类器则可一次输出多个标签. 当面对复合故障时,由于传统分类器仅能输出一个标签,将复合故障视为一种新的故障类型[19 ] ,无法充分利用复合故障与单一故障之间的联系(标签与标签之间都为独立). 故障解耦分类器将复合故障解耦输出成多个单一故障的组合,用多个单一故障的标签组合来代表复合故障,充分表达出复合故障与单一故障之间的关系. 如图1 下侧部分所示,用几个已知的单一故障标签即可排列组合表示出所有可能的复合故障情况. 一般的传统故障分类器是通过softmax函数实现的,而一般的故障解耦分类器是通过sigmoid函数实现的. ...
2
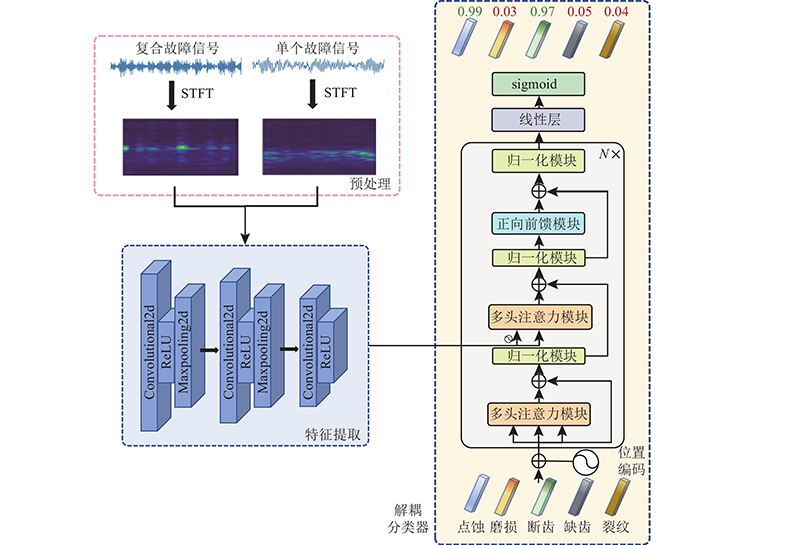
... 标准Transformer方法最早应用于自然语言处理(natural language processing, NLP)领域[20 ] 的机器翻译. 与同时期其他深度学习方法相比,Transformer 依赖内部的多头注意力机制,可以精确捕捉到长文本中各个词的位置与含义,因此在机器翻译中具有明显优势. Transformer开始广受学者关注,并被不断改进应用到图像、视觉等[21 ] 其他领域. Transformer采用编码器-解码器(encoder-decoder)的架构. 编码器主要包含多头注意力层(multi-head attention)和前馈连接层(feed forward module),而解码器相比于编码器增加了遮罩多头注意力层(masked multi-head attention). 在机器翻译中,标准Transformer的处理方法是先由编码器对长文本进行位置编码和特征提取,而后输入到解码器中,解码器再结合输入词向量对编码器的特征提取结果进行解码,最后得到每个输入词向量的概率并输出完成机器翻译. Transformer结构的成功主要得益于内部的多头注意力机制,这一机制可以使得模型学习到输入的上下文信息,对不同输入的词向量关注到不同长文本的位置. 复合故障解耦的关键在于模型是否能够在复合故障中发现耦合的单一故障,基于标准Transformer结构,设计一种基于改进Transformer的故障解耦分类器. ...
... 多头注意力机制的主要优势是可以根据不同的标签自适应地关注到与标签对应的局部的判别特征区域[20 ] ,这一优势也是将其引入到故障解耦模块中的主要原因. 在该模块中,每个查询(query)标签对应一种单一故障类型. 在故障诊断的过程中,用每个查询标签依次判断输入特征中是否包含标签对应的单一故障特征,如果是则输入该单一故障标签. 当所有查询标签轮询判断后,即可实现复合故障的解耦输出. 多头注意力机制可以借助标签信息从不同角度或不同位置观察输入特征,因此复合故障模块可以更有效地关注到各个单一故障相联系的局部判别特征区域. ...
A survey on vision transformer
1
2023
... 标准Transformer方法最早应用于自然语言处理(natural language processing, NLP)领域[20 ] 的机器翻译. 与同时期其他深度学习方法相比,Transformer 依赖内部的多头注意力机制,可以精确捕捉到长文本中各个词的位置与含义,因此在机器翻译中具有明显优势. Transformer开始广受学者关注,并被不断改进应用到图像、视觉等[21 ] 其他领域. Transformer采用编码器-解码器(encoder-decoder)的架构. 编码器主要包含多头注意力层(multi-head attention)和前馈连接层(feed forward module),而解码器相比于编码器增加了遮罩多头注意力层(masked multi-head attention). 在机器翻译中,标准Transformer的处理方法是先由编码器对长文本进行位置编码和特征提取,而后输入到解码器中,解码器再结合输入词向量对编码器的特征提取结果进行解码,最后得到每个输入词向量的概率并输出完成机器翻译. Transformer结构的成功主要得益于内部的多头注意力机制,这一机制可以使得模型学习到输入的上下文信息,对不同输入的词向量关注到不同长文本的位置. 复合故障解耦的关键在于模型是否能够在复合故障中发现耦合的单一故障,基于标准Transformer结构,设计一种基于改进Transformer的故障解耦分类器. ...
1
... S3:设有 $ K $ $ K $ $ \mathrm{s}\mathrm{i}\mathrm{g}\mathrm{m}\mathrm{o}\mathrm{i}\mathrm{d} $ [22 ] 的区别所在. ...
Deep decoupling convolutional neural network for intelligent compound fault diagnosis
1
2019
... 为了更好地模拟实际工业环境,将在训练样本中仅含少量单一故障样本数据和极少量复合故障样本数据的情况下,研究所提方法的故障诊断性能. 为了验证所提方法的诊断效果,对比当前2种广受认可的复合故障诊断算法,下文简称这2种方法为Huang[23 ] 和Liang[13 ] 方法. Huang方法使用一维深度卷积神经网络对振动信号进行特征提取,进一步使用多栈式胶囊作为故障解耦分类器进行故障诊断. Liang方法先通过小波变换对振动信号进行处理得到二维时频图,进一步将时频图输入到多标签神经网络进行复合故障分类. 将提出的基于改进Transformer的故障解耦分类器更换为一般的故障解耦分类器,即将特征提取模块的结果直接输入到一维的全连接层,并使用sigmoid函数作为故障概率输出(该方法下文简称STFT-CNN方法),与所提方法进行对比. 考虑到公平性,上述4种方法在训练和测试的过程中均使用相同的数据集. 在训练集方面,对于单一故障类型,每种故障选择200个样本作为训练集;对于复合故障类型,从0~30个逐步增加作为训练集,训练集中样本的选择为随机过程. 为了避免偶然性,针对训练集中各个单一故障和复合故障比例情况,每种情况重复10次(包括随机选择样本作为训练集、模型训练与测试),取10次的测试结果的平均值为最终的诊断准确度. 4种方法的学习率均设为0.001,训练轮数为50,选择Adam作为优化器. 4种方法在不同复合故障样本数训练下的诊断准确度结果如图8 所示. 在不同情况下训练集中的单一故障样本数量是相同的,因此随训练集中复合故障样本数量的变化,单一故障的诊断准确度变化不大(均为98%以上),图8 仅绘制不同情况下复合故障诊断的准确度,其中 ${N}_{\mathrm{0}}$ $ \mathrm{A}\mathrm{C}\mathrm{C} $




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}