

潜艇操纵性的研究方法主要有理论计算、模型试验和数值模拟[5-6]. 目前,模型试验是研究潜艇操纵性能和水动力性能的主要方式. 模型试验包括自航模试验和约束模试验2种. 约束模试验包括在风洞或循环水槽中的试验、拖曳水池中开展的直线拖曳试验(straight-line test),用以测定速度相关的水动力系数[7-12]. 在旋臂水池中开展的旋臂水池试验(rotating arm test),用以测定角速度相关的水动力系数以及在拖曳水池中开展的平面运动机构试验(planar motion mechanism,PMM),用以测定加速度相关的水动力系数[13-15]. 对于一艘新型潜艇或水下航行器,开展上述模型试验是预报潜艇或水下航行器水动力性能的重要途径[16-17].
潜艇风洞试验、循环水槽试验、斜航试验及平面运动机构试验技术均已相对成熟,而受限于试验机构及测试技术,针对潜艇在旋臂水池中的试验工作鲜有报道. 本文以一艘潜艇标模SUBOFF AFF-8为研究对象,在浙江大学旋臂水池开展一系列旋臂水池试验,分析潜艇作回转运动时的水动力特性,以期对潜艇旋臂水池试验及单平面内受力运动规律的研究起到一定的借鉴和参考作用.
1. 试验设备与工况
1.1. 旋臂水池
旋臂水池是水动力试验设备,用于测试模型在稳定回转时的水动力特性. 浙江大学旋臂水池建于2019年,直径为45 m,水深为6 m,主要由中央岛、旋臂及轨道、拖曳电机、全自动拖车和转盘、六分力天平、船坞及控制测量系统等组成. 旋臂水池内的相关设备如图1所示.
图 1

旋臂旋转角速度为0.02~1.00 rad/s,全自动转盘机构的角度精度控制为±3',全自动拖车的位置控制精度为±1 mm. 中央岛支撑系统主要由三相高压供电滑环机构和光通信滑环机构组成. 支承基础轨道的整体不平度小于0.01 mm,采用重载轨道设计. 操纵性测量平台有FPGA控制器1套,带8个PXI扩展槽、4个SCXI扩展槽. 六分力天平的量程如下:纵向力FX为± 1400 N,侧向力FY为± 4 900 N,垂向力FZ为± 4 900 N,横摇力矩MX为± 1 000 N·m,俯仰力矩MY为± 3 200 N·m,偏航力矩MZ为± 5 000 N·m.
1.2. 试验模型
该旋臂水池试验的模型为SUBOFF AFF-8. SUBOFF项目由美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)于1990年提出,旨在利用CFD技术协助未来潜艇发展[20]. 美国泰勒研究中心(David Taylor Research Center,DTRC)对SUBOFF潜艇进行大量的水池及风洞试验,涵盖直航、斜航和操纵运动等方面[21]. 全附体模型的主尺度如表1所示. 表中,LOA为总长,LPP为垂线间长,Dmax为最大艇体直径,V为排水体积,Swa为湿表面积,xB为浮心纵向位置. 围壳长为0.368 m,高为0.46 m,前缘位于模型的0.924 m处. 舵后缘位于4.007 m处,呈十字形布置.
表 1 SUBOFF AFF-8的主尺度
Tab.1
| 主尺度 | 数值 |
| LOA/m | 4.356 |
| LPP/m | 4.261 |
| Dmax/m | 0.508 |
| V/m3 | 0.718 |
| Swa/m2 | 6.338 |
| (xBLOA−1)/% | 46.21 |
为了确保模型刚度,选择纤维增强塑料作为艇体外壳的材料,在模型内部添加1根纵骨和若干肋骨. 模型外壳厚度为10 mm. 由于该试验不涉及舵角系数,尾舵固定在模型上. SUBOFF的裸艇体是完全对称的回转体,水平面测试和垂直面测试的区别在于围壳的位置不同,因此围壳可以单独制作,在变换水平面和垂直面时分别将围壳装到底部和侧面. 该方法可以大大节省安装时间,但有局限性. 若潜艇模型上下不对称,则该方法不适用,需要重新安装模型. SUBOFF AFF-8的实物如图2所示.
图 2

1.3. 模型安装
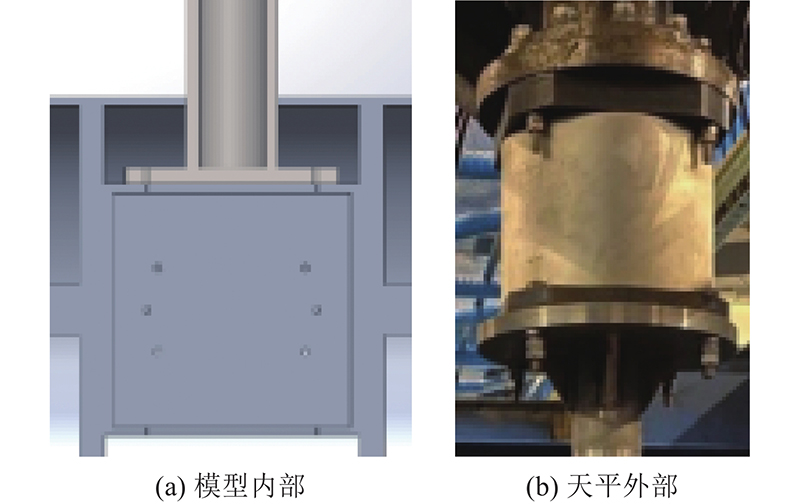
试验模型通过单支杆腹支撑安装方式与旋臂连接. 支杆长为1.65 m,直径为0.108 m,由2个法兰盘和1个空心圆管组成,如图3所示. 支杆一端与旋臂下的六分力天平相连,另一端与模型内部预埋的钢质底座相连. 钢质底座是长为0.3 m的立方体,位于模型的重心处,几何中心距离艇首2 m. 模型内部前、后对称安装了2个压载箱. 由于模型在全浸状态下产生巨大的浮力,为了使试验测量更加准确,保证六分力天平的安全,在压载箱中加压载铁,使模型正浮力为0. 压载箱尺寸为0.871 m×0.284 m×0.190 m. SUBOFF AFF-8的总质量(包括钢质底座、压载箱和支杆)为425 kg,即4 165 N,需要在压载箱中添加2905 N的压载铁,用泡沫胶将压载箱填满,防止试验中压载铁移动. 如图4所示为钢质底座和压载箱的尺寸. 如图5所示为不锈钢支杆分别与天平和钢质底座连接的示意图.
图 3

图 4
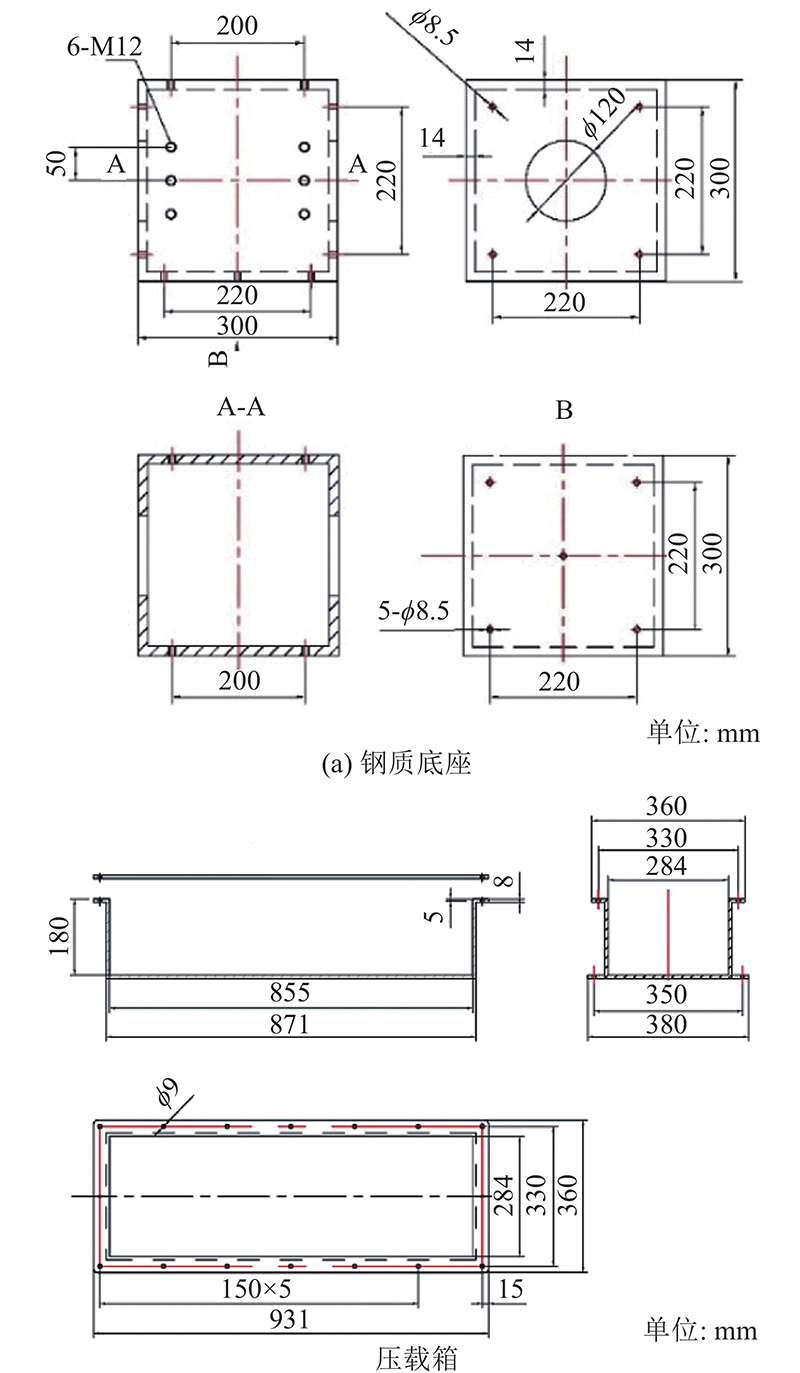
图 5
1.4. 试验工况
图 6
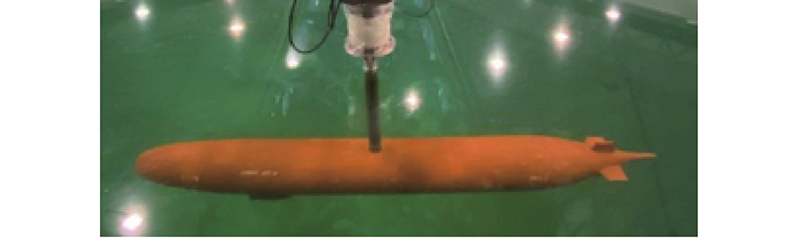
图 7
该模型试验进行4个半径的正转试验(顺时针旋转为正). 模型线速度固定在3 m/s,试验半径分别为10、12、14和16 m,对应的角速度为−0.300、−0.250、−0.214和−0.188 rad/s. 由于围壳安装在底部,在艇体坐标系下对应的角速度为负. 为了获取旋转导数,模型漂角和攻角始终为0°. 在单平面运动中,漂角或攻角的变化范围为−14°~14°,间隔为2°.
2. 六分力天平标定与校核
2.1. 天平校订仪器
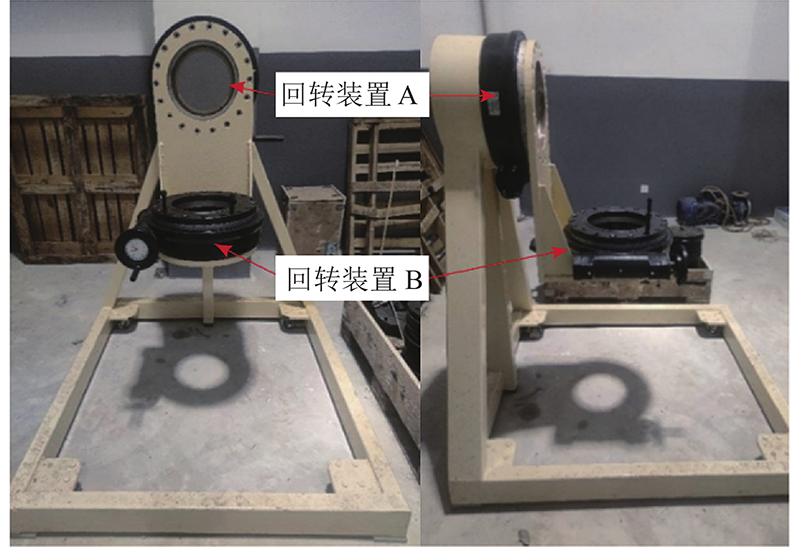
浙江大学旋臂水池的六分力天平是多分力应变式测力天平,内部的应变片结构使六分力天平能够通过感应的形式改变阻值,从而改变输出电压,通过系数矩阵转换成力和力矩的具体数值完成测量. 应变片的状态并非是稳定的,转换的系数矩阵与应变片状态相关,所以在使用之前需要从多个方向对六分力天平进行标定,确定转换的系数,以保证精度. 标定仪器如图8所示,有回转装置A和回转装置B,分别控制天平竖直回转和水平回转. 标定设备除了标定仪器外,还涉及长加载杆和短加载杆.
图 8
2.2. 标定过程
标定工作一共有6个加载状态,每个加载状态以添加不同数量砝码的方式进行,将数据导入到六分力天平标定系统软件SCal,生成系数矩阵. 该软件由武汉理工大学流体力学实验室编写,是用于多分力应变天平标定的软件. 加载工况如图9所示.
图 9
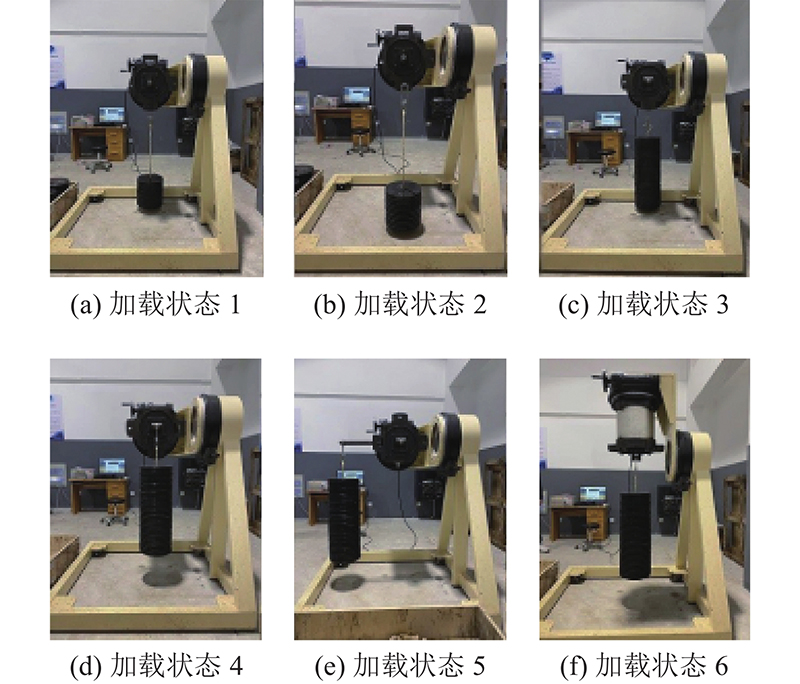
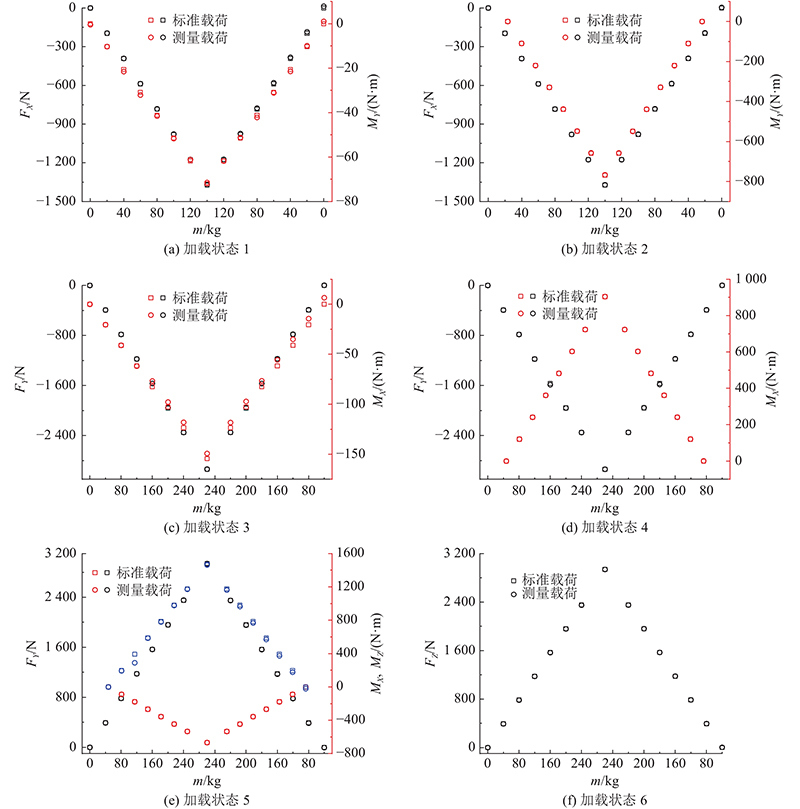
图 9 用于标定系数矩阵的6种加载工况
Fig.9 Six loading conditions for calibrating coefficient matrix
6种加载工况最终获得90组数据,将其导入SCal软件生成系数矩阵:
2.3. 系数矩阵的校核
在得到系数矩阵后,将矩阵导入SCal软件中,开展上述的6种加载状态完成校核工作. 校核结果如图10所示. 图中,m为砝码质量. 6种加载状态下系数矩阵测量的力和力矩与标准值几乎相同,证明从该标定仪器中获取的系数矩阵精度非常高. 六分力天平测得的力和力矩是可靠的.
图 10
3. 试验结果与讨论
3.1. 数据处理
天平测量到的力与力矩,除了潜艇模型自身受到的水动力外,还包括潜艇模型与支杆在回转时受到的离心力与离心力矩以及支杆伸入水下部分的水动力,所以进行数据处理时需要除去这部分的影响. 对于支杆在回转运动时所受的离心力、离心力矩与水动力,仅连接天平与支杆的状态(即空杆状态),按照试验工况进行回转试验测得,潜艇自身回转运动时的离心力可以通过自身质量计算获得.
在完成空杆测量后,将支杆连接上潜艇模型,通过外部主机调整至所需工况并将初值清零,之后进行数据测量. 测量的数据量由总回转度数确定. 当回转速度快时,回转度数设置较大,反之较小,使得最终每个工况得到的数据采样点数约为15 000.
图 11
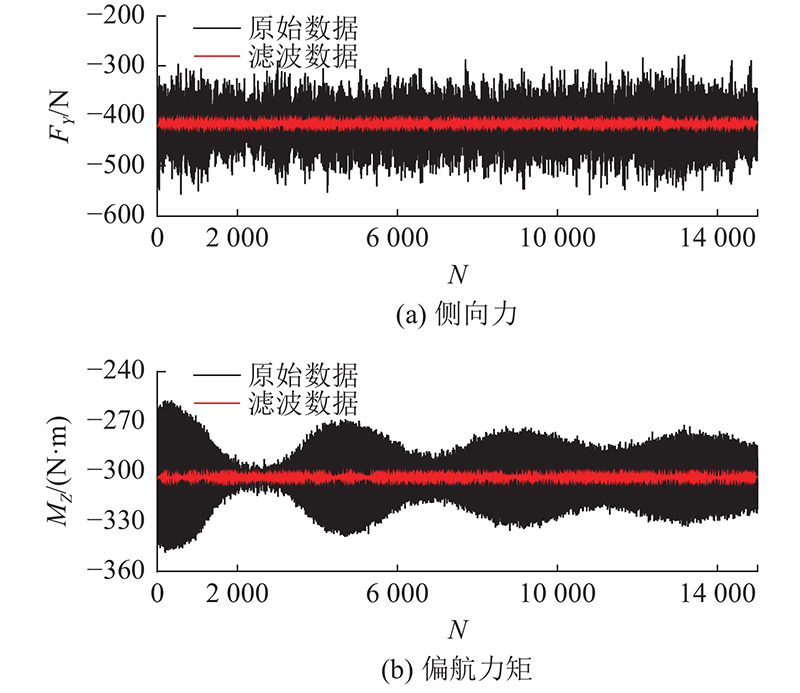
图 11 半径为16 m时水平面的力和力矩
Fig.11 Force and moment on horizontal plane with radius of 16 m
图11中,尽管采样曲线呈现波动状态且伴有较多毛刺,但能够观察出力和力矩在一定范围内上下浮动. 力矩采样曲线的波动程度明显大于力的波动. 采样曲线波动较大不仅是因为六分力天平的灵敏度高,而且是因为六分力天平受到支杆涡激振动的影响.
在得到艇体水动力和力矩后,按照下式进行量纲一处理:
式中:ρ为流体密度,L为艇长,U为线速度.
量纲一的角速度按照下式进行处理:
式中:ωq为垂直面的角速度,ωr为水平面的角速度.
3.2. 试验验证与不确定度分析
图 12
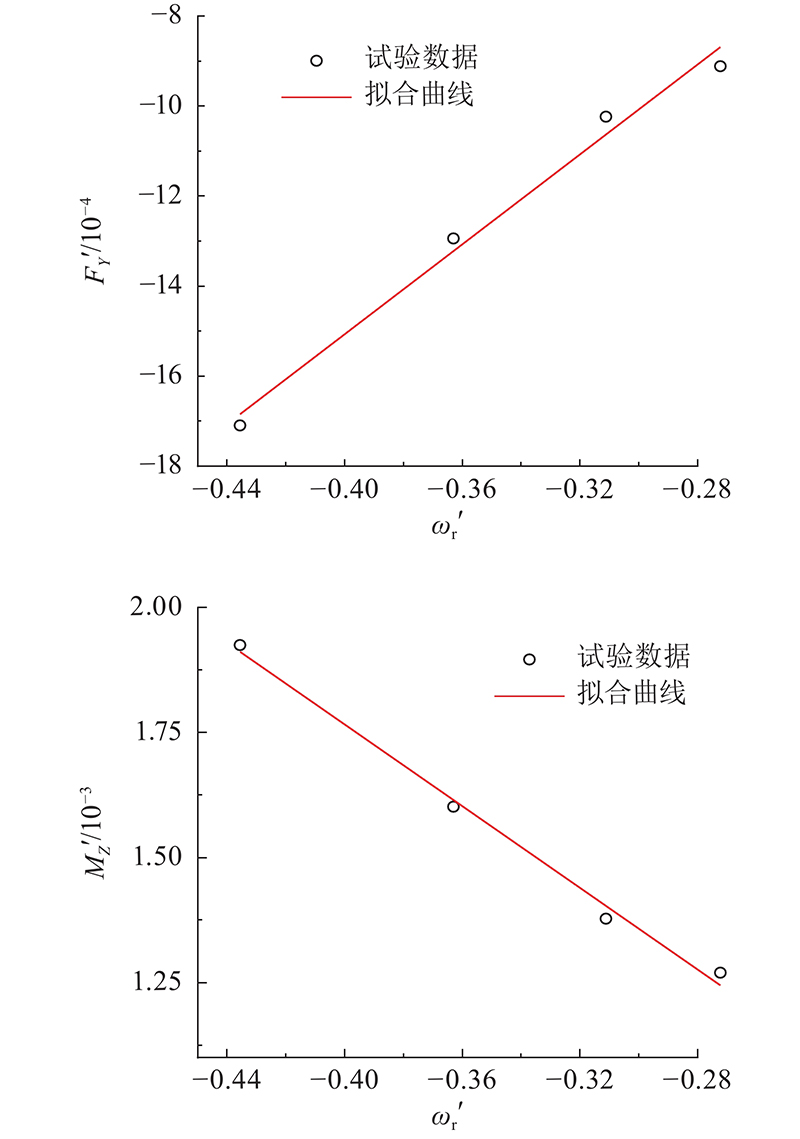
图 12 水平面量纲一的侧向力和偏航力矩
Fig.12 Dimensionless lateral force and yaw moment on horizontal plane
表 2 水平面的旋转导数
Tab.2
| 水池 | | |
| 浙大水池 | 0.004 99 | −0.004 08 |
| 泰勒水池 | 0.005 25 | −0.004 44 |
| 误差/% | 4.97 | 8.11 |
在回转过程中,潜艇的艇首在角速度ωr的影响下产生右舷攻角. 艇首的右舷攻角产生负的水动力和负的水动力矩. 船尾则相反,具有左舷攻角,产生正的水动力和负的水动力矩. 艇首和艇尾的水动力符号相反,因此水动力导数
如图13、14所示分别为SUBOFF全附体潜艇在垂直面上浮和下潜中受到的垂向力和俯仰力矩. 通过线性回归,可以得到2个与角速度ωq相关的旋转导数,分别为
图 13
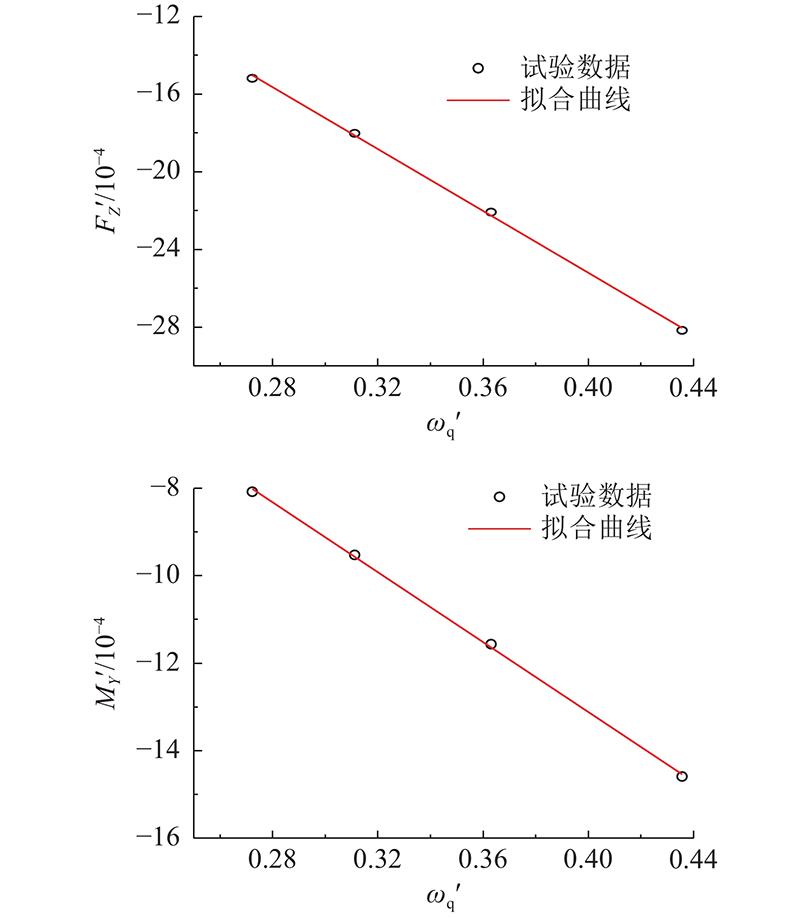
图 13 垂直面上浮的量纲一垂向力和俯仰力矩
Fig.13 Dimensionless vertical force and pitch moment of upward floating on vertical plane
图 14
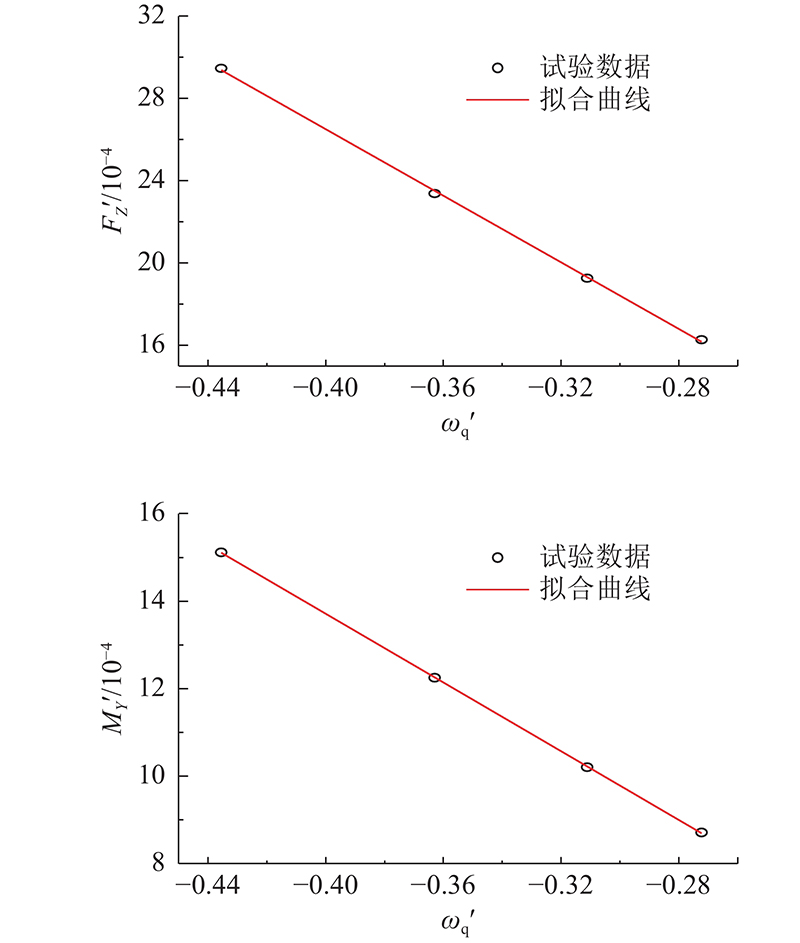
图 14 垂直面下潜的量纲一垂向力和俯仰力矩
Fig.14 Dimensionless vertical force and pitch moment of diving on vertical plane
表 3 垂直面的旋转导数
Tab.3
| 垂直面 | | | |||
| 浙大水池 | 泰勒水池 | 浙大水池 | 泰勒水池 | ||
| 上浮 | −0.007 96 | −0.007 55 | −0.003 97 | −0.003 7 | |
| 下潜 | −0.080 80 | −0.007 55 | −0.003 92 | −0.003 7 | |
式中:M为决定精密度极限的实验次数,SDev为多次试验确定的标准偏差;K为精密度系数,参考ITTC中的不确定度评估方法取值为2.
图 15
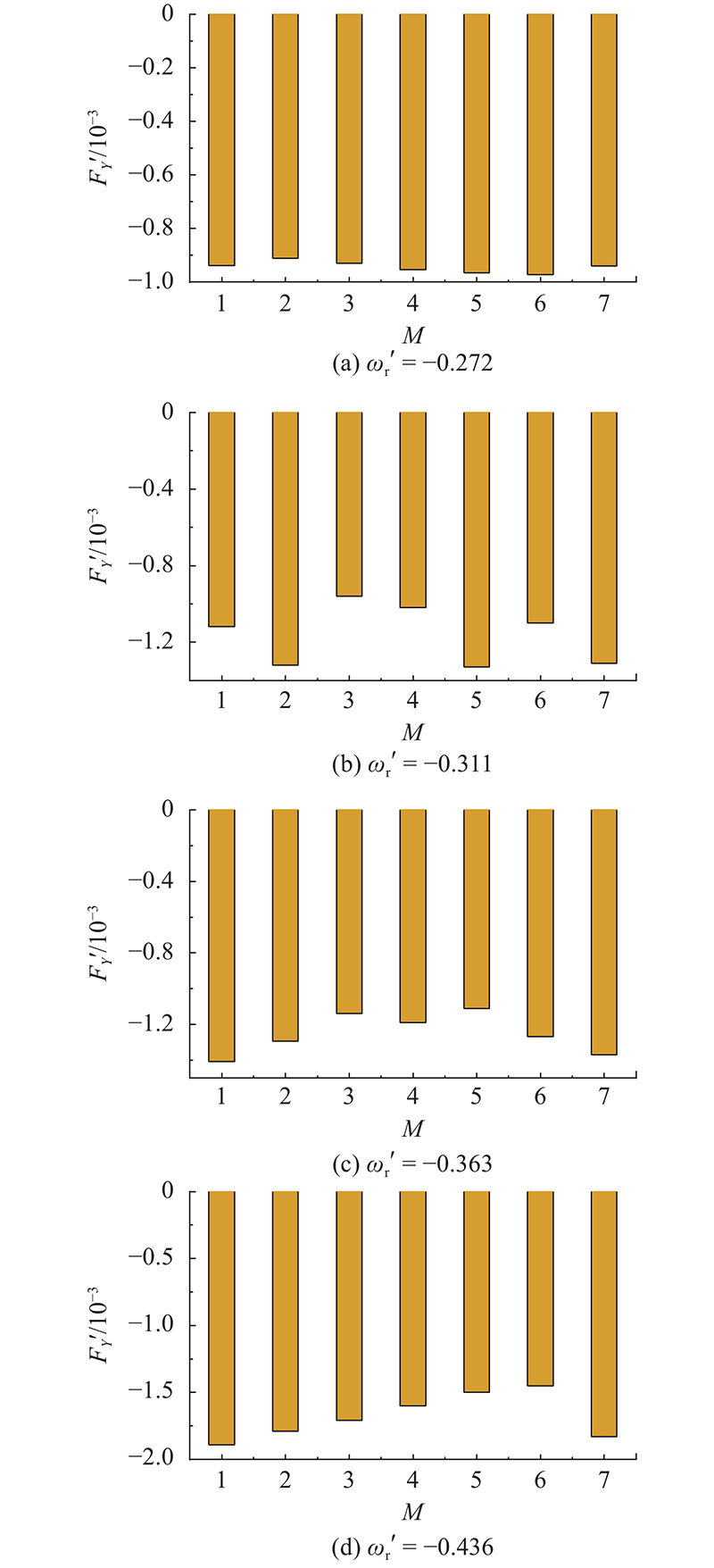
图 15 水平面0°漂角的条件下的重复试验的侧向力系数
Fig.15 Repeat tests under condition of 0° drift angle on horizontal plane
表 4 侧向力系数的标准偏差和精密度极限
Tab.4
| ωr' | SDev/10−3 | P(M)/10−3 |
| −0.272 | 0.021 | 0.015 8 |
| −0.311 | 0.154 | 0.116 0 |
| −0.363 | 0.113 | 0.085 7 |
| −0.436 | 0.169 | 0.128 0 |
3.3. 单平面的运动规律
如图16所示为水平面不同角速度下的力和力矩随漂角β的变化曲线. 不同角速度的纵向力均随着漂角的增大而增大. 纵向力以0°漂角为分界点,正漂角和负漂角的变化趋势相反. 当漂角为负时,纵向力随角速度的增加而增大;当漂角为正时,纵向力随着角速度的增加而减小. 当角速度较小时,不同漂角之间的纵向力的差距较小;当角速度较大时,不同漂角之间的纵向力的差距较大. 当漂角为0°时,不同角速度的纵向力几乎相同. 当漂角为10°、12°、14°时,纵向力为正,表示纵向力的作用方向朝向SUBOFF的首部. 在这些漂角下,SUBOFF尾部的压力大于船首的压力. 不同漂角下横向力随角速度的变化趋势与纵向力的变化趋势相同,不同角速度的横向力均随着漂角的增大而增大. 区别在于横向力随角速度的变化幅度较小. 这表明横向力受角速度的影响较小. 随着角速度的增加,垂向力逐渐增加. 垂向力在漂角上的变化趋势与纵向力和横向力有很大不同. 除了−14°和14°外,正漂角的垂向力与负漂角的垂向力几乎相同. 这主要是由于左右对称的船体外形所引起,正漂角和负漂角之间的区别只是围壳的方向不同. 负漂角处的垂向力总是略大于正漂角处的垂向力. 当漂角较小时,正、负漂角之间的垂向力的差距较小,这是由于围壳周围的流动分离现象不明显. 当漂角变大时,围壳周围的流动分离现象加剧,正、负漂角的垂向力的差距变大. 随着角速度的增加,横摇力矩逐渐减小,正、负漂角的变化趋势一致. 漂角越大,横摇力矩越大. 角速度和漂角越大,俯仰力矩越大. 俯仰力矩在正、负漂角上的不对称现象是由SUBOFF上、下不对称的外形所引起的. 当漂角为负时,迎流面为右舷一侧,此时向右舷方向回转会增大艇体的首尾压差,加剧艇体的俯仰运动. 当漂角为正时,迎流面变为左舷,向右回转时会削弱艇体的俯仰运动,因此艇体处于正漂角时的俯仰力矩小于负漂角. 偏航力矩随着角速度的增加而减小. 在回转过程中,与偏航力矩相比,横摇力矩和俯仰力矩非常小.
图 16
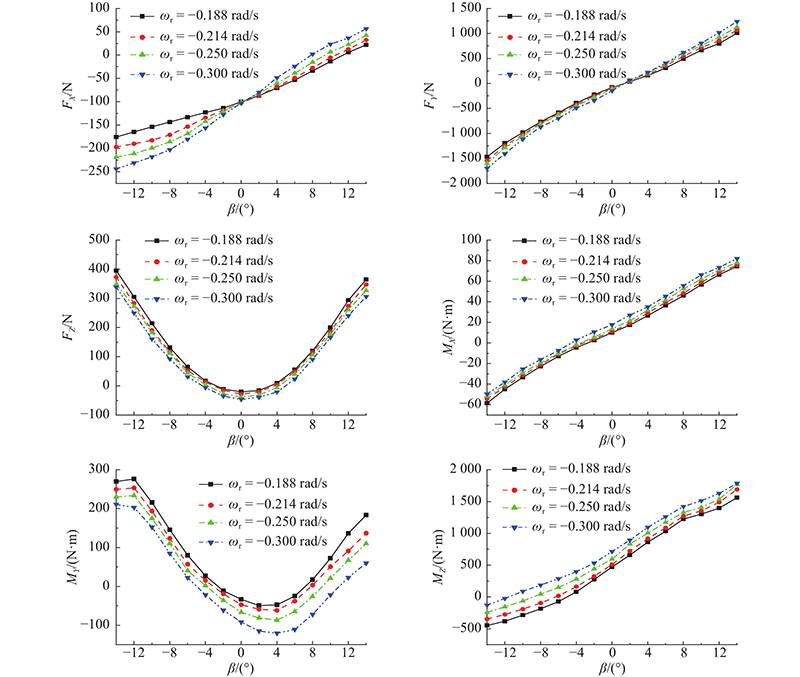
图 16 水平面不同角速度下的力、力矩随漂角的变化曲线
Fig.16 Variation curves of forces and moments with drift angles at different angular velocities on horizontal plane
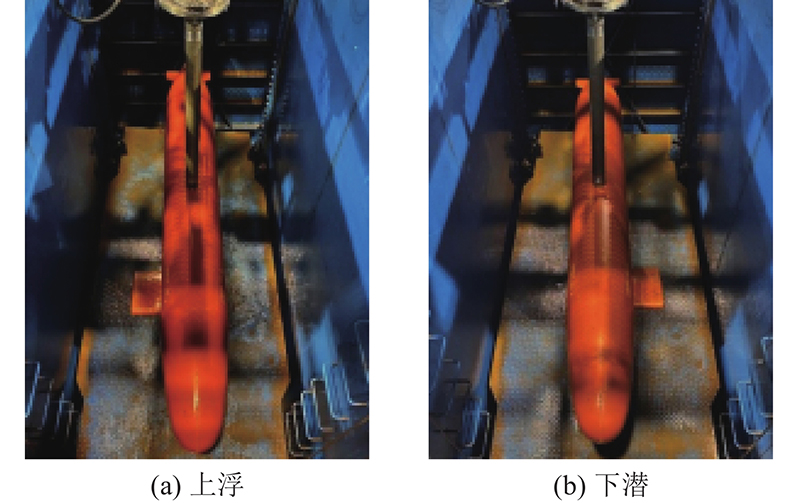
如图17、18所示分别为上浮和下潜运动在垂直平面上的力和力矩随攻角α的变化曲线. 可以看出,上浮和下潜运动的力和力矩是对称分布的. 上浮运动时,角速度越大,纵向力越大,不同攻角下纵向力的差距越大. 此现象与水平面运动的纵向力变化相同,这表明SUBOFF旋转时纵向力不受平面的限制. 对于垂向力,当攻角为负时,不同角速度的垂向力的差距较小. 随着攻角的增大,不同角速度的垂向力的差距逐渐增大. 这是因为当SUBOFF上浮且攻角为负时,SUBOFF的头部向下,尾部倾斜,迎流面是SUBOFF的上表面,流过SUBOFF上表面的流体会受到尾部的阻碍而导致上、下表面的压力差变小,因此不同角速度的垂向力之间的差异很小,垂向力的方向向下. 当SUBOFF上浮且迎角为正时,上游表面是SUBOFF的下表面,流过SUBOFF下表面的流体将沿着船体排出,导致上、下表面的压力差变大,因此垂向力之间的差异变大. 对于俯仰力矩,角速度越大,俯仰力矩越小.
图 17
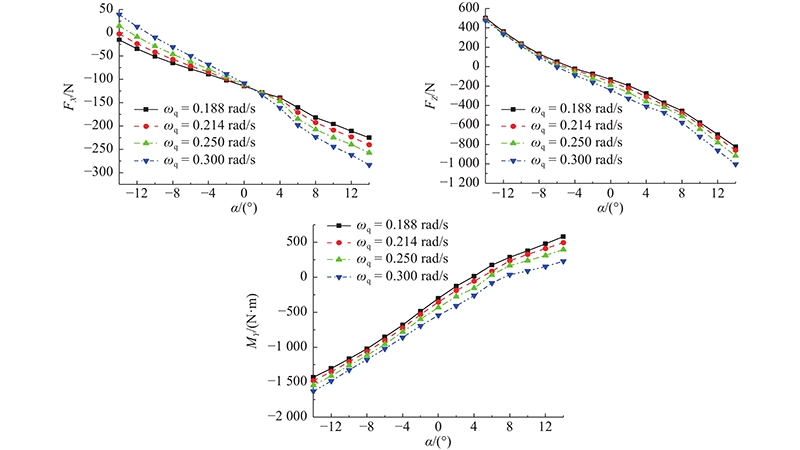
图 17 垂直面上浮运动不同角速度下的力、力矩随攻角的变化曲线
Fig.17 Variation curves of forces and moment with angles of attack at different angular velocities of vertical plane floating motion
图 18
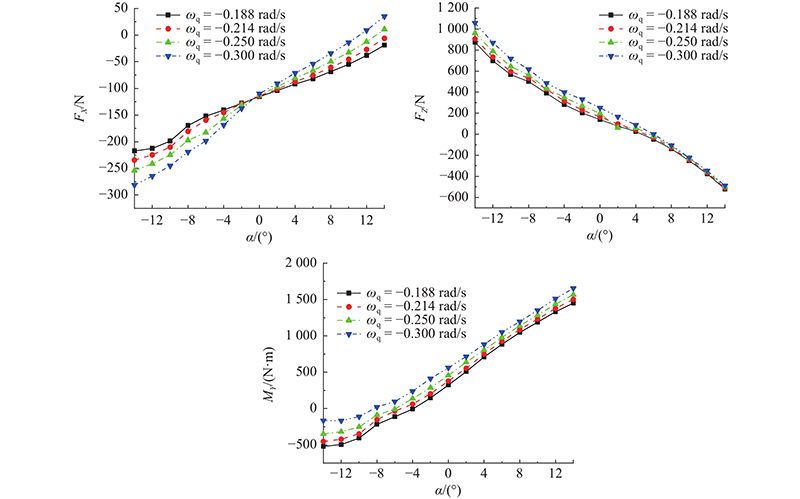
图 18 垂直面下潜运动不同角速度下的力、力矩随攻角的变化曲线
Fig.18 Variation curves of forces and moment with angles of attack at different angular velocities of vertical plane diving motion
4. 结 论
(1)通过对比泰勒水池的试验数据,浙江大学旋臂水池的测试误差小于10%. 试验数据具有良好的可靠性. 在旋臂水池试验中,为了满足傅汝德数和雷诺数高于临界值,模型试验的尺寸和速度不应太小. 旋转导数是指角速度为零时的线性水动力系数,因此试验应尽可能使用较小的角速度和较大的回转半径.
(2)潜艇旋臂试验的难度在于如何控制潜艇在水面以下的位置. 若潜艇距离水面太近,则近水面会对潜艇造成一定程度的影响. 支柱产生的波浪力会垂直向下传递到艇体上. 若潜艇距离水面太远,则长支柱会产生强烈的涡激振动,对力和力矩的测量产生不利影响.
(3)潜艇在水平面和垂直面上的运动各有不同,但都有规律可循. 在水平面运动时,纵向力和横向力随漂角的变化曲线关于0°漂角对称. 横摇力矩和偏航力矩随漂角的增大而增大. 垂向力和俯仰力矩随漂角的变化呈类似抛物线分布. 在垂直面运动时,上浮和下潜运动的力和力矩是对称分布的. 上浮运动时,角速度越大,纵向力越大,在较高的角速度下,不同攻角下的力差值更大.
参考文献
潜艇水动力系数数值计算
[J].DOI:10.3963/j.issn.1671-7953.2008.03.001
Numerical calculation of the submarine’s hydrodynamic coefficients
[J].DOI:10.3963/j.issn.1671-7953.2008.03.001
基于滑移网格的潜艇旋臂试验数值模拟
[J].
Sliding mesh based on numerical simulation of rotating arms tests for submarines
[J].
潜体水动力导数的CFD计算方法研究
[J].
Approaches for predicting hydrodynamic characteristic of submarine objects
[J].
基于CFD的潜艇操纵性数值仿真发展综述
[J].DOI:10.3404/j.issn.1672-7649.2020.05.001 [本文引用: 1]
Review of development in numerical simulation of submarine maneuverability based on CFD
[J].DOI:10.3404/j.issn.1672-7649.2020.05.001 [本文引用: 1]
潜艇操纵性预报研究现状与前景展望
[J].
Progress and prospect of maneuverability prediction for submarine
[J].
潜艇操纵性水动力系数预报方法研究
[J].
Research on prediction method of submarine maneuverability hydrodynamic coefficient
[J].
Experimental investigation of hydrodynamic characteristics of a submersible vehicle model with a non-axisymmetric nose in pitch maneuver
[J].DOI:10.1016/j.oceaneng.2015.03.010
Experimental and numerical study of a generic conventional submarine at 10 yaw
[J].DOI:10.1016/j.oceaneng.2016.01.001
The structure of the wake generated by a submarine model in yaw
[J].
An investigation of free surface effects on drag and lift coefficients of an autonomous underwater vehicle (AUV) using computational and experimental fluid dynamics methods
[J].DOI:10.1016/j.jfluidstructs.2014.09.001 [本文引用: 1]
The experimental study on maneuvering derivatives of a submerged body SUBOFF by implementing the planar motion mechanism tests
[J].DOI:10.1016/j.oceaneng.2018.10.015 [本文引用: 1]
The estimation of hydrodynamic coefficients of an autonomous underwater vehicle by comparing a dynamic mesh model with a horizontal planar motion mechanism experiment
[J].DOI:10.1016/j.oceaneng.2022.110847
螺旋桨及其运行对潜艇操纵性水动力影响的模型试验研究
[J].
Model test study of influence of propeller and its rotation on hydrodynamics of submarine maneuverability
[J].
Savitzky-Golay smoothing filters
[J].DOI:10.1063/1.4822961 [本文引用: 1]
船舶CFD不确定度分析及ITTC临时规程的初步应用
[J].
Uncertainty analysis in ship CFD and the primary application of ITTC procedures
[J].
船模拖曳阻力试验的不确定度分析
[J].DOI:10.3969/j.issn.1006-7043.2006.03.013
Uncertainty analysis of ship model towing resistance test
[J].DOI:10.3969/j.issn.1006-7043.2006.03.013
测量不确定度分析在操纵性试验中的应用
[J].DOI:10.3969/j.issn.1007-7294.2004.05.007
Uncertainty analysis in captive model test
[J].DOI:10.3969/j.issn.1007-7294.2004.05.007

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}