

星载合成孔径雷达(synthetic aperture radar,SAR)具有穿透力强,不受气候条件影响的优点,同时还具有扫描范围广、不易遭受打击、无空间限制等优势. 因此,星载SAR技术被广泛应用于环境监测、资源勘察、灾害监视等领域,特别是在军事侦察中更易识别伪装从而发现地下军事设施[1]. 针对星载SAR技术可能对我国产生的威胁,必须积极发展星载SAR的电子干扰措施,对截获的星载SAR信号进行分析,鉴别星载SAR的工作模式,以在电子对抗中占据先机.
针对星载SAR工作模式鉴别的问题,研究人员已经进行相关研究并取得了一定成果. 陈颖颖等[2]建立了星载SAR侦察模型,研究不同工作模式下SAR信号截获的难易程度和接收功率的形态,但未对SAR卫星工作模式判决方法进行深入研究. 唐小明等[3]提出了多站测量方法,较为精确地反演了星载SAR的工作模式及观测范围. Jordi等[4]根据SAR卫星的轨道信息预测了SAR卫星的工作模式. 夏周越等[5]综合对SAR信号的距离参数、多普勒参数和波束中心功率图等信息的分析,实现了星载 SAR工作模式的准确鉴别. 当前多数研究主要针对的是星载SAR主瓣信号,在实际中地基接收机主要截获的是星载SAR旁瓣信号,而旁瓣信号强度较低,易被噪声淹没. 传统星载SAR工作模式反演方法的准确率主要取决于人为提取的SAR信号特征能否准确表征不同工作模式的差异性,该方法存在适应性不强、抗噪性能差的问题且判别过程较为繁琐.
人工智能作为近年来发展迅猛的领域,逐渐具备了强大的自主学习能力和模式识别能力. 鉴于人工智能技术在图片分类和语音识别领域取得的成效,将其应用到星载SAR工作模式识别中,可以实现由原始信号数据到SAR工作模式的“端到端”快速准确识别,对于提高星载SAR工作模式识别的准确性是一种新的发展方向. 本研究在前人研究的基础上,提出了基于一维卷积神经网络(one-dimensional convolutional neural network,1D-CNN)的星载SAR工作模式鉴别方法,直接将SAR信号脉冲峰值幅度输入一维卷积神经网络,通过卷积神经网络自动提取不同工作模式下SAR信号的细微分类特征信息,避免了人工信号处理和特征提取的局限性,并通过对比实验对一维卷积神经网络模型的准确度、鲁棒性和优越性进行分析验证.
1. 星载SAR信号侦察模型
1.1. 星载SAR主要工作模式
图 1
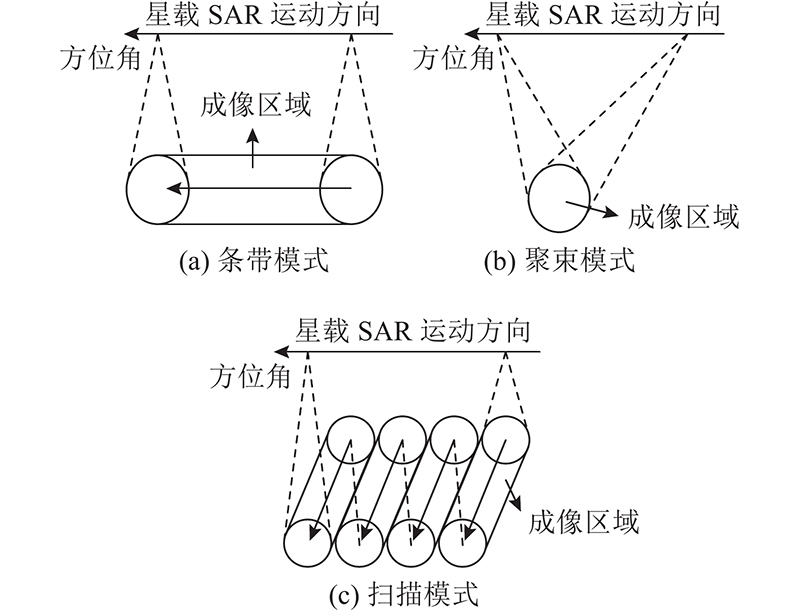
在条带模式下,随着卫星平台的移动,天线的指向保持不变且匀速扫过目标,以此获得不间断的图像. 条带模式的条带长度仅取决于雷达移动的距离,方位向的分辨率由天线的长度决定.
在聚束模式下,通过控制天线波束指向,使其随着雷达飞过照射区而逐渐向后调整,以此扩大感兴趣区域的天线照射波束角宽,提高方位向分辨率. 波束指向的控制可以在一段时间内模拟出一个较宽的天线波束,但是波束指向最终要调回到前向,因而聚束模式的地面覆盖区域是不连续的,仅可对地面的一个有限圆域进行成像.
在扫描模式下,天线在一个合成孔径时间内会沿着距离向进行多次扫描,通过这种方式牺牲方位向分辨率而获得较宽的测绘带宽. 扫描模式能够获得的最佳方位分辨率等于条带模式下的方位分辨率与扫描条带数的乘积.
1.2. 星载SAR信号侦察可行性
当前多数低截获概率雷达使用线性调频作为脉冲压缩波形[7],线性调频信号的峰值功率较低,采用常规侦收手段较难截获雷达的旁瓣信号. SAR是一种相干成像雷达,要求回波信号具有良好的相干性,因此对雷达发射机的参数和天线波束指向有严格的要求. 在一次成像时间内,线性调频信号的调频带宽和脉冲宽度,雷达的载波频率和脉冲重复频率都不能随意改变,而天线的波束指向也必须与飞行方向保持固定的夹角(如条带模式),或是始终指向被观测地区(如聚束模式),这些限制使雷达侦察系统能够较容易地获取SAR的工作参数. 对于星载SAR,其在运行中轨道一般不发生改变,因而在获知卫星轨道信息的前提下,可以用窄波束、高增益的天线实现对旁瓣信号的截获[8].
地基接收机截获到的星载SAR信号是一个未聚焦的周期性脉冲串,则在自由空间下,在接收机处SAR信号的功率密度表达式如下:
式中:
经过天线、馈线进入接收机输入端的信号功率表达式如下:
式中:
式(1)、(2)讨论的是侦察星载SAR主瓣信号所获取的功率信息,当对旁瓣进行侦察时,天线增益会随着与主瓣夹角的变化而改变. 当前多数星载SAR采用平面相控阵天线,当天线口径分布为常数时,其天线方向性图表达式如下:
式中:
由于天线模型被视为均匀口照射,且无加权,其天线增益可以改写为
式中:
因此,在侦收星载SAR信号时,输入接收机的信号功率表达式如下:
2. 一维卷积神经网络
2.1. 卷积神经网络
卷积层的卷积核可以视为滤波器,其作用是使用多个卷积核来提取不同的特征. 卷积过程可以描述为输入特征映射和卷积核之间的卷积,随后添加偏置项,其过程如下:
式中:
池化层主要作用是保留特征,对卷积层获得的特征映射降采样,减少下一层的参数和计算量. 同时,池化操作对数据具有一定的平移不变性,可以提高网络的鲁棒性.
激活函数是神经网络的重要组成部分,用于非线性变换. 早期的神经网络主要采用sigmoid函数或者tanh函数. 近些年ReLU函数及其改进型在多层神经网络中应用较多. ReLU激活函数表达式如下:
式中:
批归一化[11]的目的是减少内部协变量移位,在内部协变量移位中,特征的分布往往在训练迭代过程中不断变化,卷积层中的参数必须不断更新以适应变化的分布,这增加了训练难度. 批归一化优化方差大小和均值位置,使得新的分布更切合数据的真实分布,以保证模型的非线性表达能力,其过程如下:
式中:
交叉熵误差[12]经常被用作多类识别任务中要最小化的目标函数. 在采用交叉熵损失函数时,网络最后一层权重的梯度与激活函数的导数无关,只与输出值和真实值的差值成正比,梯度更新幅度不受初始输出值大小的影响,因此损失函数收敛较快. 另外,多分类交叉熵损失求导更简单,损失仅与正确类别的概率有关,而且损失对于softmax激活层的输入求导较为简单.
2.2. 1D-CNN网络结构设计
图 2
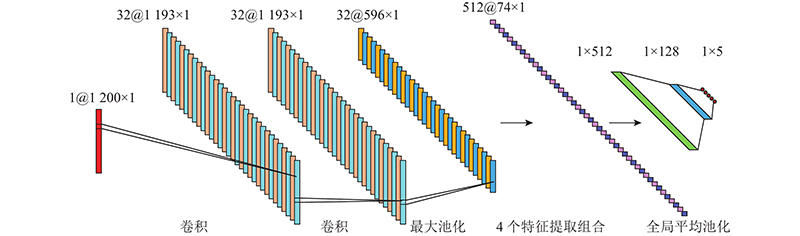
图 2 一维卷积神经网络结构示意图
Fig.2 Schematic diagram of one-dimensional convolutional neural network structure
3. 实验仿真
3.1. 构建数据集
在实际截获SAR信号时,地基接收机处SAR信号的功率可以通过其脉冲峰值幅度
图 3
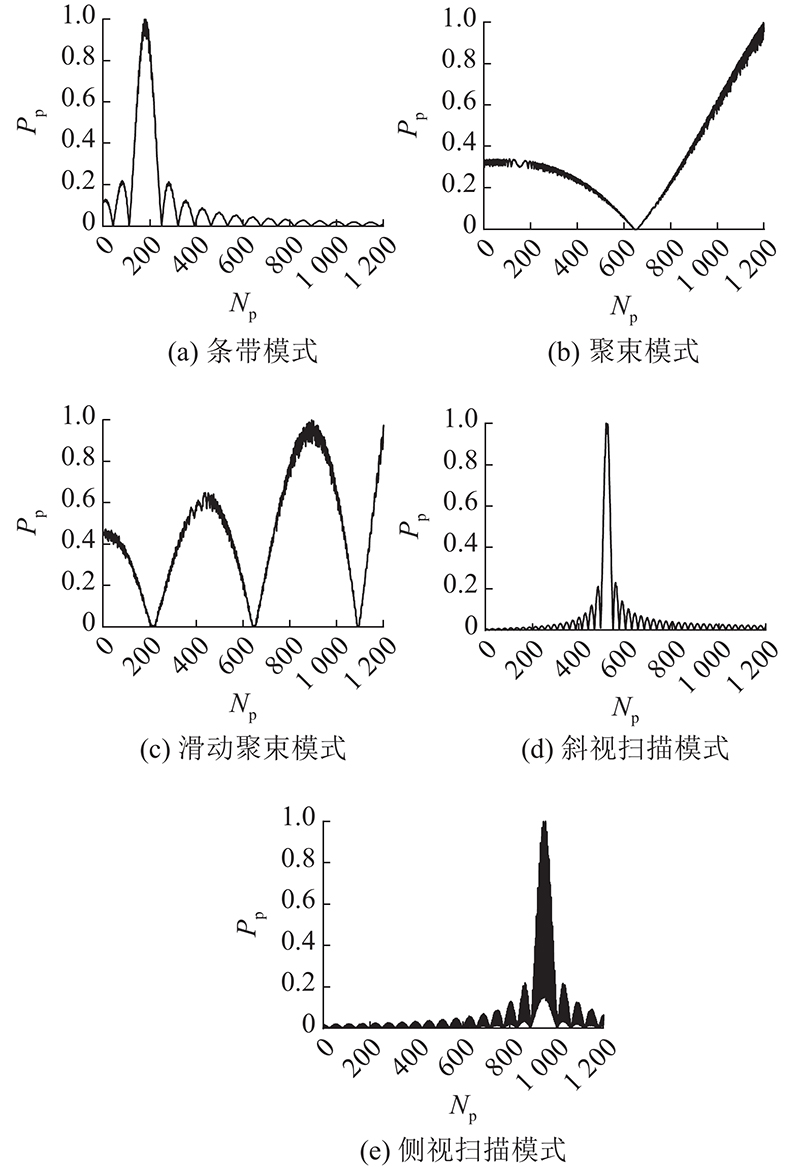
图 3 不同工作模式下的脉冲信号峰值幅度
Fig.3 Peak amplitude of pulse signal in different operating modes
表 1 星载SAR传感器参数
Tab.1
| 仿真参数 | 数值 | 仿真参数 | 数值 | |
| 发射功率 | 5 000 W | 合成孔径时间 | 20 s | |
| 天线增益 | 45 dB | 最小侧视角 | 20° | |
| 波束方位宽度 | 0.2° | 最大侧视角 | 50° | |
| 波束距离宽度 | 1° | 最大斜视角 | 30° | |
| 信号带宽 | 30 MHz | 发射脉冲宽度 | 5 us | |
| 载波频率 | 10 GHz | 侦收采样率 | 60 MHz |
式中:
3.2. 实验环境与超参数设置
本研究实验的系统环境为Ubuntu 18.04,采用NVIDIA Quadro RTX 5000图形显卡作为计算资源,以Tensorflow为后端的python-keras搭建网络模型. 经过多次实验调整参数,本实验选择以下超参数训练一维卷积神经网络模型.
3.2.1. 学习率
学习率决定损失函数能否在合适的时间收敛到最小值. 太小的学习率易造成收敛速度缓慢,而过大的学习率可能造成梯度在最小值附近震荡,从而无法收敛. 经过多次小范围的调整,发现在将学习率设置为0.000 1时,网络训练效率较优.
3.2.2. 批尺寸
批尺寸(batch size)是每次调整参数前所选取的样本数量. 如果批尺寸的值太小,则无法充分利用矩阵快速运算的优势,从而学习变得缓慢;如果值选择太大,则需要较大的内存容量,达到同样精度所需时间也会增加. 因此,须选择一个适宜的值,本实验中batch size设置为32.
3.2.3. 训练周期
网络每次学习完一遍数据集称为一个训练周期(epoch). 如果训练周期设置太小,网络没有充足的数据和时间去训练得到最优参数;如果训练周期设置过大,模型易从欠拟合变成过拟合. 由于本研究实验训练数据充足,将训练周期设置为200.
4. 实验结果与分析
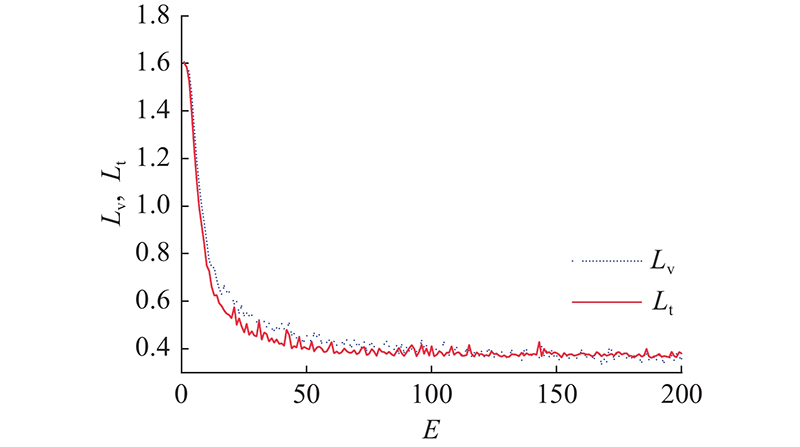
4.1. 模型训练与验证
图 4
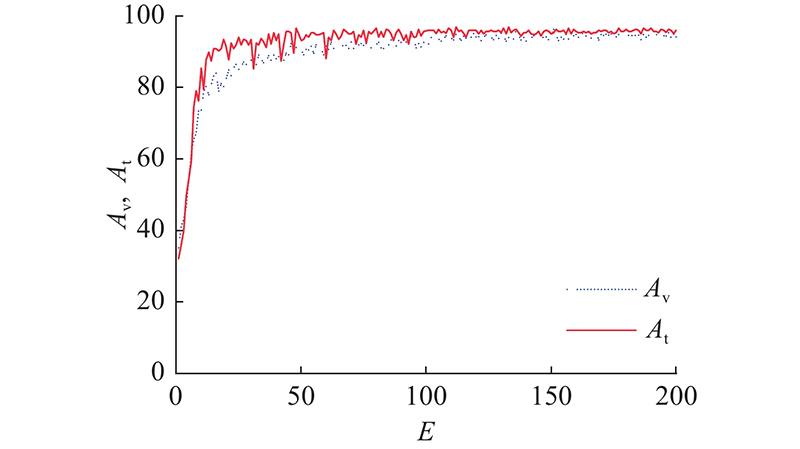
图 5
为了验证本研究提出的1D-CNN模型的优越性,与传统星载SAR工作模式反演方法以及其他深度学习网络模型进行对比. 按照文献[5]中方法提取SAR信号的接收功率形态与多普勒历程作为特征结合softmax分类器实现星载SAR工作模式的识别. 对于深度学习模型,采用在时序数据中具有较好识别效果的长短时记忆(long short-term memory,LSTM)和门控循环单元(gated recurrent unit,GRU)作为对比模型,为了保证性能比较的公平性,上述2种模型的网络结构和超参数设置与1D-CNN模型保持一致.
图 6
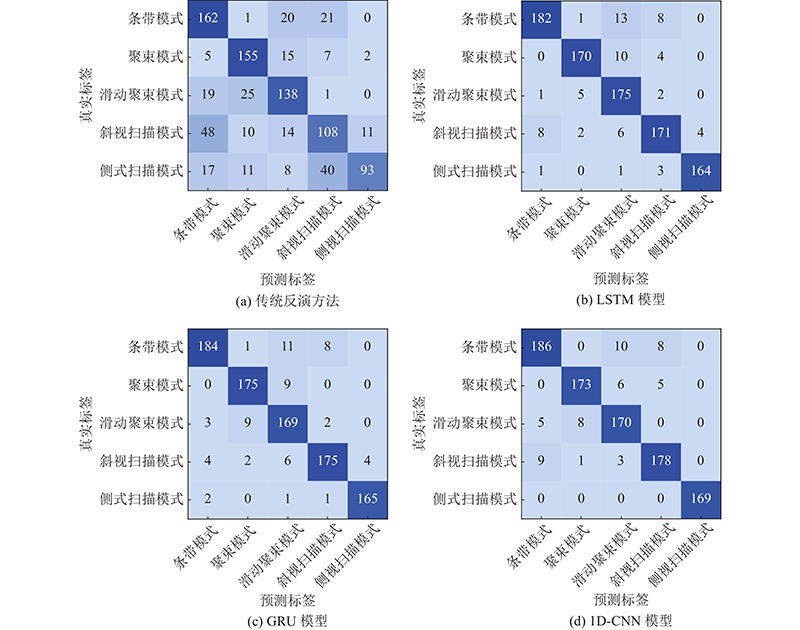
表 2 不同分类方法的识别准确率对比结果
Tab.2
| 方法 | Re/% | Acc/% | ||||
| 条带 模式 | 聚束 模式 | 滑动 聚束 | 斜视 扫描 | 侧式 扫描 | ||
| 文献[5] | 79.41 | 84.24 | 75.41 | 56.54 | 55.03 | 70.46 |
| LSTM | 89.22 | 92.39 | 95.63 | 89.53 | 96.04 | 92.59 |
| GRU | 90.20 | 95.11 | 92.35 | 91.62 | 97.63 | 93.23 |
| 1D-CNN | 91.18 | 94.02 | 92.90 | 93.19 | 100.00 | 94.09 |
表 3 不同深度学习模型的训练对比结果
Tab.3
| 方法 | Nt | tt |
| LSTM | 80 755 205 | 7 h 16 min 22 s |
| GRU | 80 229 381 | 5 h 53 min 56 s |
| 1D-CNN | 4 262 597 | 1 h 10 min 46 s |
4.2. 信号类型对模型的影响
为了验证主旁瓣信号对1D-CNN模型识别准确率的影响,根据地面接收站接收到SAR信号的类别建立主瓣信号测试集和旁瓣信号测试集,对1D-CNN模型进行评估.
图 7
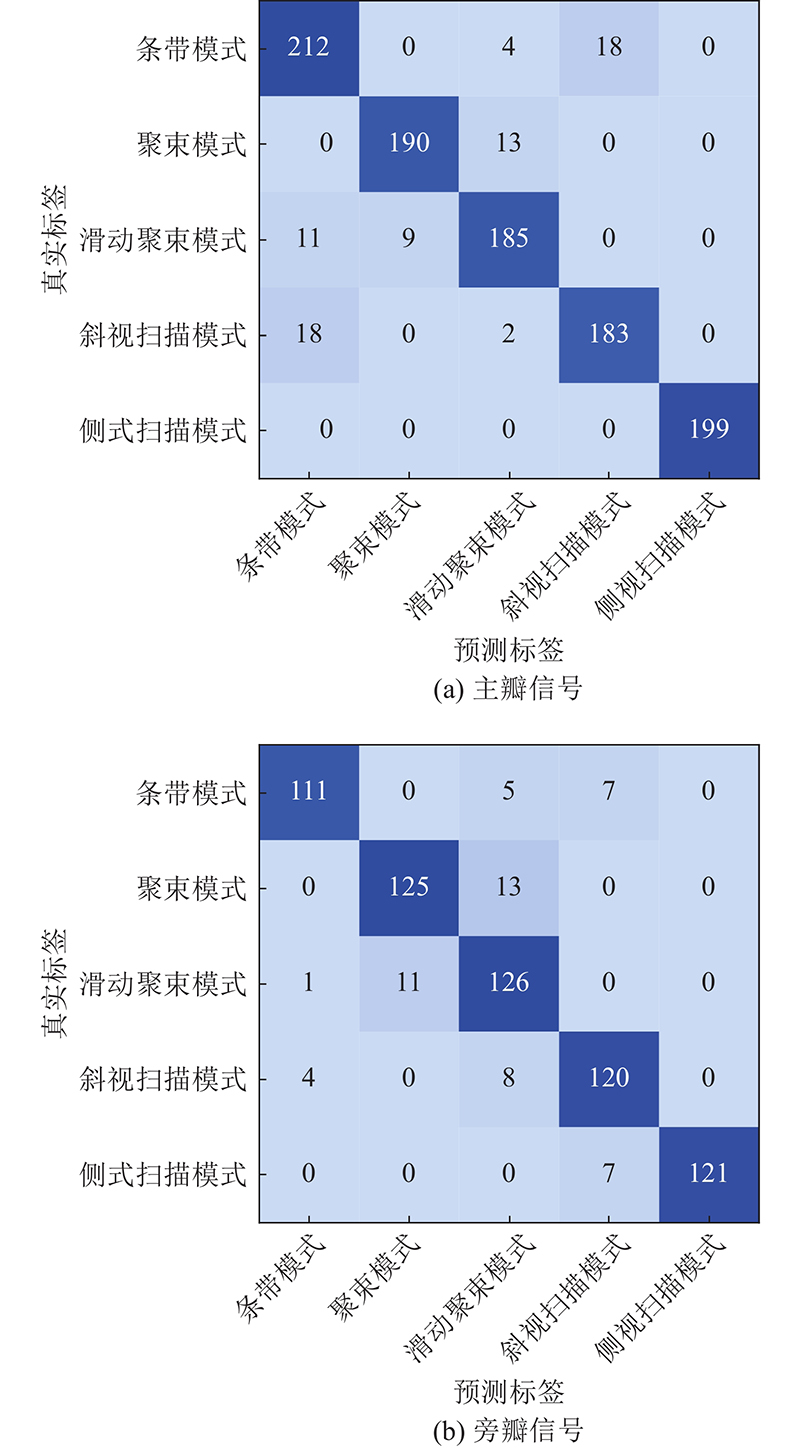
表 4 不同类型信号分类准确率
Tab.4
| 信号类型 | Re/% | Acc/% | ||||
| 条带 模式 | 聚束 模式 | 滑动 聚束 | 斜视 扫描 | 侧式 扫描 | ||
| 主瓣信号 | 90.60 | 93.60 | 90.24 | 90.15 | 100 | 92.82 |
| 旁瓣信号 | 90.24 | 90.58 | 91.30 | 90.90 | 94.53 | 91.50 |
4.3. 接收区域对模型的影响
为了验证接收区域对1D-CNN模型识别准确率的影响,根据地面接收站距离被观测目标的远近,分别建立近区测试集、中区测试集和远区测试集,对1D-CNN模型进行评估. 地面接收站部署区域划分如图8所示. 图中,近区为星载SAR天线主瓣波束覆盖地面的区域,中区为除近区外第1旁瓣波束覆盖地面的区域,远区为除去近区和中区外地面接收站能接收到信号的地面区域. 随着地面接收站距离被观测目标越来越远,其接收到信号的强度也会逐渐降低.
图 8
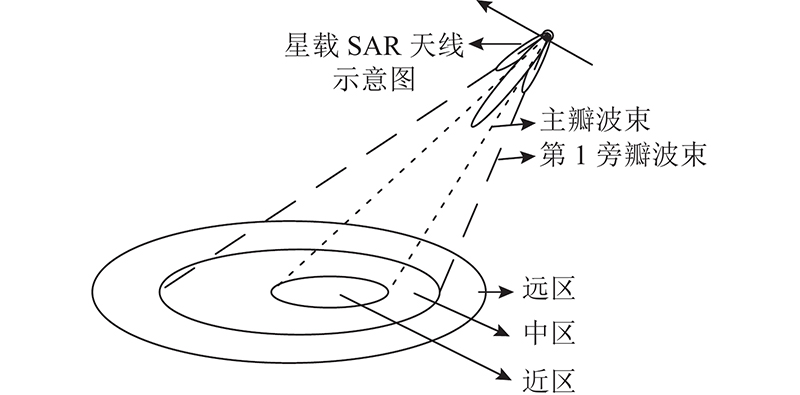
图 8 地面接收站部署区域划分
Fig.8 Division of deployment areas of ground receiving station
图 9
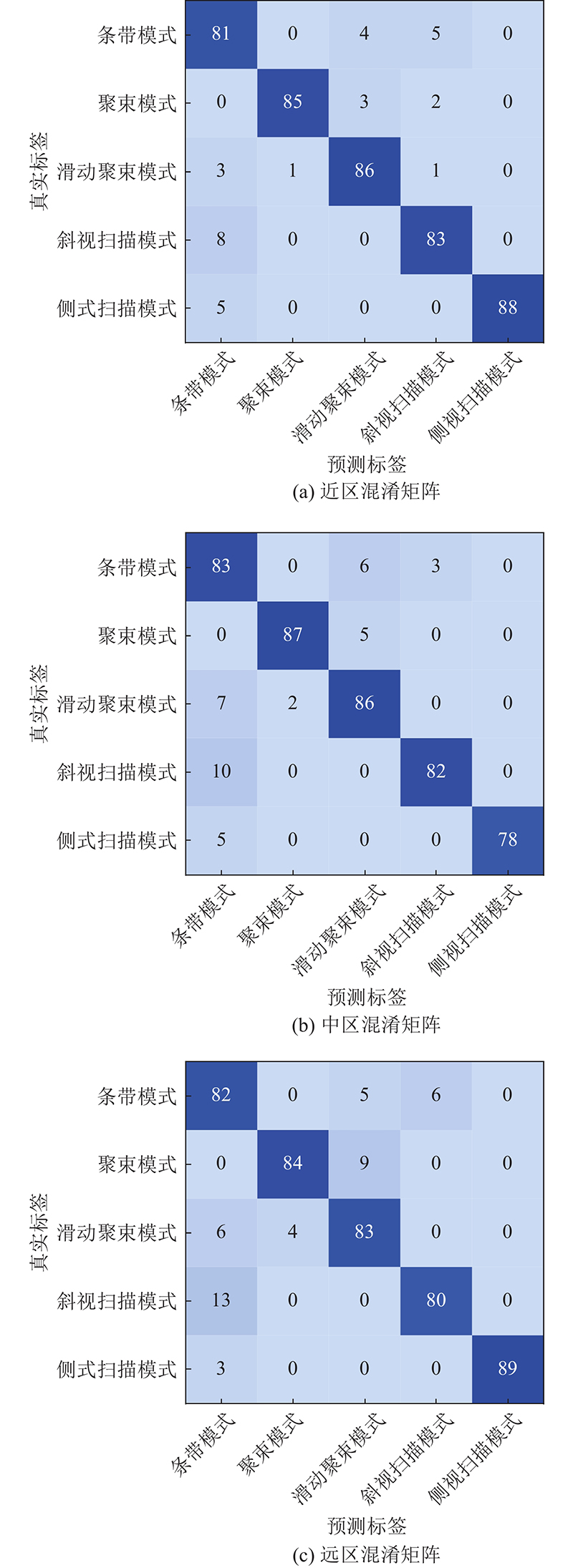
表 5 不同接受区域分类准确率
Tab.5
| 接收区域 | Re/% | Acc/% | ||||
| 条带 模式 | 聚束 模式 | 滑动 聚束 | 斜视 扫描 | 侧式 扫描 | ||
| 近区 | 90.00 | 94.44 | 94.51 | 91.21 | 94.62 | 92.97 |
| 中区 | 90.22 | 94.57 | 90.53 | 89.13 | 93.98 | 91.63 |
| 远区 | 88.18 | 90.32 | 89.25 | 86.02 | 96.74 | 90.09 |
5. 结 语
本研究提出基于深度学习的星载SAR工作模式鉴别模型. 相比于传统的星载SAR工作模式反演方法,该模型根据星载SAR信号的特点,将脉冲信号峰值幅度输入一维卷积神经网络,可以直接处理原始的SAR信号,可以实现由原始信号数据到星载SAR工作模式的“端到端”快速准确识别,避免了人为选取信号特征参数的主观性,提升了识别模型的泛化性,省去了人工提取信号特征参数的步骤,降低了识别过程的复杂性.
采用星载SAR信号仿真数据对不同识别方法进行测试,实验结果表明,1D-CNN模型能够学习到SAR信号稳定的分类特征信息并保留其完整性, 1D-CNN模型对星载SAR不同工作模式的识别准确率能达到91%以上,显著高于传统反演方法;相较于LSTM和GRU深度学习模型,1D-CNN模型能在保持高识别率的同时具备较优的训练效率;对于主瓣和旁瓣信号,1D-CNN模型具有较好的适应性,对于不同类型信号的平均识别准确率大于91%;同时1D- CNN模型具有一定的抗噪性,在接收的信号强度有所降低时,仍能保持对星载SAR工作模式的识别准确率高于86%.
本研究仅探讨了星载SAR工作模式的类型识别问题,未涉及到星载SAR工作模式的详细参数估计问题. 因此在下一步研究中,可以在构建数据集时进一步细化SAR信号数据的标签,以实现对星载SAR的天线类型、扫描模式的条带数、滑动因子等详细参数的估计.
参考文献
国外先进星载SAR卫星的发展现状及应用
[J].
The nowaday development and application of oversea advanced spaceborne SAR
[J].
对不同工作模式星载合成孔径雷达的侦察研究
[J].DOI:10.3778/j.issn.1002-8331.1110-0569 [本文引用: 1]
Surveillance study of spaceborne synthetic aperture radar in different working modes
[J].DOI:10.3778/j.issn.1002-8331.1110-0569 [本文引用: 1]
基于遗传算法的星载SAR工作模式反演方法
[J].DOI:10.3969/j.issn.1674-7135.2013.02.017 [本文引用: 1]
An operation inversion method of spaceborne SAR based on genetic algorithm
[J].DOI:10.3969/j.issn.1674-7135.2013.02.017 [本文引用: 1]
Improved early crop type identification by joint use of high temporal resolution SAR and optical image time series
[J].DOI:10.3390/rs8050362 [本文引用: 1]
侦察模式下星载合成孔径雷达工作模式鉴别
[J].
Identification of the spaceborne SAR operating modes under reconnaissance mode
[J].
条带模式、聚束模式和滑动聚束模式的比较
[J].
Comparative study on stripmap mode, spotlight mode, and sliding spotlight mode
[J].
低截获概率雷达信号侦察技术
[J].DOI:10.3969/j.issn.1673-2421.2020.05.010 [本文引用: 1]
Low probability of intercept radar signal reconnaissance technology
[J].DOI:10.3969/j.issn.1673-2421.2020.05.010 [本文引用: 1]
对聚束和滑动聚束模式下星载合成孔径雷达的旁瓣侦察比较研究
[J].DOI:10.3969/j.issn.1671-1815.2012.08.014 [本文引用: 1]
The sidelobe surveillance study of spaceborne synthetic aperture radar in spotlight and sliding spotlight mode
[J].DOI:10.3969/j.issn.1671-1815.2012.08.014 [本文引用: 1]
卷积神经网络研究综述
[J].DOI:10.11897/SP.J.1016.2017.01229 [本文引用: 1]
Review of convolutional neural network
[J].DOI:10.11897/SP.J.1016.2017.01229 [本文引用: 1]
基于时频特征的卷积神经网络跳频调制识别
[J].
Frequency hopping modulation recognition of convolutional neural network based on time-frequency characteristics
[J].
Deep learning
[J].
基于一维卷积神经网络的钻杆故障诊断
[J].
Drill pipe fault diagnosis method based on one-dimensional convolutional neural network
[J].
Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks
[J].
基于一维卷积神经网络的螺旋铣刀具磨损监测
[J].
Wear monitoring of helical milling tool based on one-dimensional convolutional neural network
[J].
Impulse signals classification using one dimensional convolutional neural network
[J].DOI:10.2478/jee-2020-0054 [本文引用: 1]
Enhanced efficiency BPSK demodulator based on one-dimensional convolutional neural network
[J].DOI:10.1109/ACCESS.2018.2834144 [本文引用: 1]
多方位角观测星载SAR技术研究
[J].DOI:10.12000/JR20015 [本文引用: 1]
Review of novel azimuthal multi-angle observation spaceborne SAR technique
[J].DOI:10.12000/JR20015 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}