[1]
国家能源局. 国家能源局网上新闻发布会文字实录(2012-2019)[EB/OL]. [2021-08-01]. http://www.nea.gov.cn/.
[本文引用: 1]
[2]
楼卓. 光伏电站自主巡检中的无人机视觉定位算法研究[D]. 杭州: 浙江大学, 2019.
[本文引用: 1]
LOU Zhuo. Research on UAV visual positioning algorithm in autonomous inspection of photovoltaic power station [D]. Hangzhou: Zhejiang University, 2019.
[本文引用: 1]
[3]
NIE J, LUO T, LI H Automatic hotspots detection based on UAV infrared images for large-scale PV plant
[J]. Electronics Letters , 2020 , 56 (19 ): 993 - 995
DOI:10.1049/el.2020.1542
[4]
SHERMAN M, GAMMILL M, RAISSI A, et al. Solar UAV for the inspection and monitoring of photovoltaic (PV) systems in solar power plants[C]// AIAA Scitech 2021 Forum . 2021: 1683.
[本文引用: 1]
[5]
MUOZ J, LORENZO E, MARTÍNEZ-MORENO F, et al An investigation into hot-spots in two large grid-connected PV plants
[J]. The Prostate , 2008 , 16 (8 ): 693 - 701
[本文引用: 1]
[6]
蒋琳, 苏建徽, 施永, 等 基于红外热图像处理的光伏阵列热斑检测方法
[J]. 太阳能学报 , 2020 , 41 (8 ): 180 - 184
[本文引用: 1]
JIANG Lin, SU Jian-hui, SHI Yong, et al Hot spot detection method of photovoltaic array based on infrared thermal image processing
[J]. Journal of Solar Energy , 2020 , 41 (8 ): 180 - 184
[本文引用: 1]
[7]
SU Y, TAO F, JIN J, et al Automated overheated region object detection of photovoltaic module with thermography image
[J]. IEEE Journal of Photovoltaics , 2021 , 11 (2 ): 535 - 544
DOI:10.1109/JPHOTOV.2020.3045680
[8]
位硕权. 基于红外图像的光伏组件热斑智能检测[D]. 杭州: 浙江大学, 2020.
[本文引用: 1]
WEI Shuo-quan. Intelligent detection of photovoltaic module hot spot based on infrared image [D]. Hangzhou: Zhejiang University, 2020.
[本文引用: 1]
[9]
TSANAKAS J A, CHRYSOSTOMOU D, BOTSARIS P N Fault diagnosis of photovoltaic modules through image processing and canny edge detection on field thermographic measurements
[J]. International Journal of Sustainable Energy , 2015 , 34 (6 ): 351 - 372
[本文引用: 1]
[10]
NGO G C, MACABEBE E Q B. Image segmentation using K-means color quantization and density-based spatial clustering of applications with noise (DBSCAN) for hotspot detection in photovoltaic modules [C]// 2016 IEEE Region 10 Conference (TENCON) . Singapore: IEEE, 2016: 1614-1618.
[本文引用: 1]
[11]
CHEN J, LI Y, LING Q. Hot-spot detection for thermographic images of solar panels[C]// 2020 Chinese Control And Decision Conference (CCDC) . Hefei : IEEE, 2020: 4651-4655.
[本文引用: 1]
[12]
REN S, HE K, GIRSHICK R, et al Faster R-CNN: towards real-time object detection with region proposal networks
[J]. Advances in Neural Information Processing Systems , 2015 , 28 : 91 - 99
[本文引用: 1]
[13]
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Las Vegas: IEEE, 2016: 779-788.
[本文引用: 1]
[14]
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]// European Conference on Computer Vision . Amsterdam: Springer, 2016: 21-37.
[本文引用: 1]
[15]
吴涛, 赖菲 基于 LeNet-5 模型的太阳能电池板缺陷识别分类
[J]. 热力发电 , 2019 , 48 (3 ): 120 - 125
[本文引用: 1]
WU Tao, LAI Fei Defect identification and classification of solar panels based on lenet-5 model
[J]. Thermal Power Generation , 2019 , 48 (3 ): 120 - 125
[本文引用: 1]
[16]
郭梦浩, 徐红伟 基于Faster RCNN的红外热图像热斑缺陷检测研究
[J]. 计算机系统应用 , 2019 , 28 (11 ): 6
[本文引用: 1]
GUO Meng-hao, XU Hong-wei Research on infrared thermal image hot spot defect detection based on fast RCNN
[J]. Computer System Application , 2019 , 28 (11 ): 6
[本文引用: 1]
[17]
GRECO A, PIRONTI C, SAGGESE A, et al. A deep learning based approach for detecting panels in photovoltaic plants [C]// Proceedings of the 3rd International Conference on Applications of Intelligent Systems . Las Palmas de Gran Canaria: Acm Digital Library, 2020: 1-7.
[本文引用: 1]
[18]
KRIZHEVSKY A, SUTSKEVER I, HINTON G. ImageNet classification with deep convolutional neural networks [C]// International Conference on Neural Information Processing Systems . Lake Tahoe: Curran Associates Inc, 2012: 1097-1105.
[本文引用: 1]
[19]
CANNY J A computational approach to edge detection
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 1986 , PAMI-8 (6 ): 679 - 698
DOI:10.1109/TPAMI.1986.4767851
[本文引用: 1]
[20]
SUZUKI S, BE K Topological structural analysis of digitized binary images by border following
[J]. Computer Vision Graphics and Image Processing , 1985 , 30 (1 ): 32 - 46
DOI:10.1016/0734-189X(85)90016-7
[21]
ROTHER C, KOLMOGOROV V, BLAKE A GrabCut: interactive foreground extraction using iterated graph cuts
[J]. ACM Transactions on Graphics , 2004 , 23 (3 ): 309 - 314
DOI:10.1145/1015706.1015720
[本文引用: 1]
[22]
IEC Central Office. Photovoltaic (PV) systems: requirements for testing, documentation and maintenance: IEC TS 62446-3[S]. [s. l. ]: IEC, 2017.
[本文引用: 2]
[23]
TAN M, LE Q. Efficientnet: rethinking model scaling for convolutional neural networks[C]// International Conference on Machine Learning . Long Beach: PMLR, 2019: 6105-6114.
[本文引用: 1]
[24]
Von GIOI R G, JAKUBOWICZ J, MOREL J M, et al LSD: a line segment detector
[J]. Image Processing on Line , 2012 , 2 (4 ): 35 - 55
[本文引用: 1]
[25]
SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[EB/OL]. [2021-08-01]. https://doi.org/10.48550/arXiv.1409.1556.
[本文引用: 1]
[26]
HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]// Proceedings of the IEEE conference on computer vision and pattern recognition . Las Vegas: IEEE, 2016: 770-778.
[本文引用: 1]
[27]
HUANG G, LIU Z, VAN DER MAATEN L, et al. Densely connected convolutional networks [C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Honolulu: IEEE, 2017: 4700-4708.
[本文引用: 1]
[28]
IANDOLA F N, HAN S, MOSKEWICZ M W, et al. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and< 0.5 MB model size[EB/OL]. [2021-08-01]. https://doi.org/10.48550/arXiv.1602.07360.
[本文引用: 1]
[29]
HOWARD A G, ZHU M, CHEN B, et al. Mobilenets: efficient convolutional neural networks for mobile vision applications [EB/OL]. [2021-08-01]. https://doi.org/10.48550/arXiv.1704.04861.
[本文引用: 1]
[30]
ZHANG X, ZHOU X, LIN M, et al. Shufflenet: an extremely efficient convolutional neural network for mobile devices[C]// Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition . Salt Lake City: IEEE, 2018: 6848-6856.
[本文引用: 1]
[31]
HE K, ZHANG X, REN S, et al Spatial pyramid pooling in deep convolutional networks for visual recognition
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 2014 , 37 (9 ): 1904 - 1916
[本文引用: 1]
1
... 随着能源和环境问题的不断凸显,世界各国对于清洁能源的投入和使用也在不断增加. 可再生能源的开发,尤其是太阳能的开发得到了格外的重视. 根据国家能源局[1 ] 公布的数据,近年来我国光伏发电量持续增长,在全国发电量中的占比也不断增加,截至2019年底,我国全年光伏发电量同比增长26.3%,占我国全年总发电量的3.1%. 随着光伏装机容量不断增长,传统人工巡检方式将不再适用. 因此,提出高效的缺陷检测策略就显得尤为重要. 近年来,计算机视觉、无人机硬件以及计算机相关技术都得到了迅猛的发展,使得基于无人机的自动巡检方式成为可能[2 -4 ] . ...
1
... 随着能源和环境问题的不断凸显,世界各国对于清洁能源的投入和使用也在不断增加. 可再生能源的开发,尤其是太阳能的开发得到了格外的重视. 根据国家能源局[1 ] 公布的数据,近年来我国光伏发电量持续增长,在全国发电量中的占比也不断增加,截至2019年底,我国全年光伏发电量同比增长26.3%,占我国全年总发电量的3.1%. 随着光伏装机容量不断增长,传统人工巡检方式将不再适用. 因此,提出高效的缺陷检测策略就显得尤为重要. 近年来,计算机视觉、无人机硬件以及计算机相关技术都得到了迅猛的发展,使得基于无人机的自动巡检方式成为可能[2 -4 ] . ...
1
... 随着能源和环境问题的不断凸显,世界各国对于清洁能源的投入和使用也在不断增加. 可再生能源的开发,尤其是太阳能的开发得到了格外的重视. 根据国家能源局[1 ] 公布的数据,近年来我国光伏发电量持续增长,在全国发电量中的占比也不断增加,截至2019年底,我国全年光伏发电量同比增长26.3%,占我国全年总发电量的3.1%. 随着光伏装机容量不断增长,传统人工巡检方式将不再适用. 因此,提出高效的缺陷检测策略就显得尤为重要. 近年来,计算机视觉、无人机硬件以及计算机相关技术都得到了迅猛的发展,使得基于无人机的自动巡检方式成为可能[2 -4 ] . ...
Automatic hotspots detection based on UAV infrared images for large-scale PV plant
0
2020
1
... 随着能源和环境问题的不断凸显,世界各国对于清洁能源的投入和使用也在不断增加. 可再生能源的开发,尤其是太阳能的开发得到了格外的重视. 根据国家能源局[1 ] 公布的数据,近年来我国光伏发电量持续增长,在全国发电量中的占比也不断增加,截至2019年底,我国全年光伏发电量同比增长26.3%,占我国全年总发电量的3.1%. 随着光伏装机容量不断增长,传统人工巡检方式将不再适用. 因此,提出高效的缺陷检测策略就显得尤为重要. 近年来,计算机视觉、无人机硬件以及计算机相关技术都得到了迅猛的发展,使得基于无人机的自动巡检方式成为可能[2 -4 ] . ...
An investigation into hot-spots in two large grid-connected PV plants
1
2008
... 热斑是光伏组件出现频率很高的一种典型缺陷. 该缺陷一般由局部遮挡或者组件内部缺陷引起,会很大程度地影响组件的运行效率,小的热斑可能降低的光伏组件效率,导致电量损失,严重时甚至会造成电池局部烧毁形成暗斑和焊点熔化永久性损坏[5 ] . 因此,对热斑进行有效检测和排除,在光伏电站的持续高效运行中具有重要的意义. 近年来基于视觉的热斑检测方法[6 -8 ] 都以热斑作为缺陷检测目标. 然而,热斑形成的原因很多,比如组件外部的遮挡和内部组件损坏都可能会引起热斑,不同类型的热斑需要针对性的处理,以确保组件的健康、稳定运行. ...
基于红外热图像处理的光伏阵列热斑检测方法
1
2020
... 热斑是光伏组件出现频率很高的一种典型缺陷. 该缺陷一般由局部遮挡或者组件内部缺陷引起,会很大程度地影响组件的运行效率,小的热斑可能降低的光伏组件效率,导致电量损失,严重时甚至会造成电池局部烧毁形成暗斑和焊点熔化永久性损坏[5 ] . 因此,对热斑进行有效检测和排除,在光伏电站的持续高效运行中具有重要的意义. 近年来基于视觉的热斑检测方法[6 -8 ] 都以热斑作为缺陷检测目标. 然而,热斑形成的原因很多,比如组件外部的遮挡和内部组件损坏都可能会引起热斑,不同类型的热斑需要针对性的处理,以确保组件的健康、稳定运行. ...
基于红外热图像处理的光伏阵列热斑检测方法
1
2020
... 热斑是光伏组件出现频率很高的一种典型缺陷. 该缺陷一般由局部遮挡或者组件内部缺陷引起,会很大程度地影响组件的运行效率,小的热斑可能降低的光伏组件效率,导致电量损失,严重时甚至会造成电池局部烧毁形成暗斑和焊点熔化永久性损坏[5 ] . 因此,对热斑进行有效检测和排除,在光伏电站的持续高效运行中具有重要的意义. 近年来基于视觉的热斑检测方法[6 -8 ] 都以热斑作为缺陷检测目标. 然而,热斑形成的原因很多,比如组件外部的遮挡和内部组件损坏都可能会引起热斑,不同类型的热斑需要针对性的处理,以确保组件的健康、稳定运行. ...
Automated overheated region object detection of photovoltaic module with thermography image
0
2021
1
... 热斑是光伏组件出现频率很高的一种典型缺陷. 该缺陷一般由局部遮挡或者组件内部缺陷引起,会很大程度地影响组件的运行效率,小的热斑可能降低的光伏组件效率,导致电量损失,严重时甚至会造成电池局部烧毁形成暗斑和焊点熔化永久性损坏[5 ] . 因此,对热斑进行有效检测和排除,在光伏电站的持续高效运行中具有重要的意义. 近年来基于视觉的热斑检测方法[6 -8 ] 都以热斑作为缺陷检测目标. 然而,热斑形成的原因很多,比如组件外部的遮挡和内部组件损坏都可能会引起热斑,不同类型的热斑需要针对性的处理,以确保组件的健康、稳定运行. ...
1
... 热斑是光伏组件出现频率很高的一种典型缺陷. 该缺陷一般由局部遮挡或者组件内部缺陷引起,会很大程度地影响组件的运行效率,小的热斑可能降低的光伏组件效率,导致电量损失,严重时甚至会造成电池局部烧毁形成暗斑和焊点熔化永久性损坏[5 ] . 因此,对热斑进行有效检测和排除,在光伏电站的持续高效运行中具有重要的意义. 近年来基于视觉的热斑检测方法[6 -8 ] 都以热斑作为缺陷检测目标. 然而,热斑形成的原因很多,比如组件外部的遮挡和内部组件损坏都可能会引起热斑,不同类型的热斑需要针对性的处理,以确保组件的健康、稳定运行. ...
Fault diagnosis of photovoltaic modules through image processing and canny edge detection on field thermographic measurements
1
2015
... 在基于传统计算机视觉方法的热斑检测方面,Tsanakas等[9 ] 提出了基于标准红外图像和Canny边缘检测算子的热斑检测方法. 通过多次测量热图像来判断光伏组件是否有缺陷. Ngo等[10 ] 从K-mean聚类的方法出发,提出一种红外光伏图像的轮廓提取和热斑检测方法,但在背景环境复杂时,边缘信息容易被覆盖,难以提取. Chen等[11 ] 提出一种基于单通道的阈值分割和Canny的组件提取方法,取得了较好的分割效果,但其在对热斑缺陷检测时使用颜色空间的均值和标准差作为特征进行分类,虽然提高了泛化性能,但依然是基于统计特征的分类方式,会损失一部分图像中的信息. ...
1
... 在基于传统计算机视觉方法的热斑检测方面,Tsanakas等[9 ] 提出了基于标准红外图像和Canny边缘检测算子的热斑检测方法. 通过多次测量热图像来判断光伏组件是否有缺陷. Ngo等[10 ] 从K-mean聚类的方法出发,提出一种红外光伏图像的轮廓提取和热斑检测方法,但在背景环境复杂时,边缘信息容易被覆盖,难以提取. Chen等[11 ] 提出一种基于单通道的阈值分割和Canny的组件提取方法,取得了较好的分割效果,但其在对热斑缺陷检测时使用颜色空间的均值和标准差作为特征进行分类,虽然提高了泛化性能,但依然是基于统计特征的分类方式,会损失一部分图像中的信息. ...
1
... 在基于传统计算机视觉方法的热斑检测方面,Tsanakas等[9 ] 提出了基于标准红外图像和Canny边缘检测算子的热斑检测方法. 通过多次测量热图像来判断光伏组件是否有缺陷. Ngo等[10 ] 从K-mean聚类的方法出发,提出一种红外光伏图像的轮廓提取和热斑检测方法,但在背景环境复杂时,边缘信息容易被覆盖,难以提取. Chen等[11 ] 提出一种基于单通道的阈值分割和Canny的组件提取方法,取得了较好的分割效果,但其在对热斑缺陷检测时使用颜色空间的均值和标准差作为特征进行分类,虽然提高了泛化性能,但依然是基于统计特征的分类方式,会损失一部分图像中的信息. ...
Faster R-CNN: towards real-time object detection with region proposal networks
1
2015
... 随着深度学习在图像处理领域的快速发展,各种图像分类、目标检测以及分割的模型在各自的领域内都取得较好的效果,Faster RCNN[12 ] 、YOLO[13 ] 、SSD[14 ] 等方法相比传统的图像检测方法具备更高的鲁棒性. 通常,深度学习在复杂的环境下更能取得好的效果. ...
1
... 随着深度学习在图像处理领域的快速发展,各种图像分类、目标检测以及分割的模型在各自的领域内都取得较好的效果,Faster RCNN[12 ] 、YOLO[13 ] 、SSD[14 ] 等方法相比传统的图像检测方法具备更高的鲁棒性. 通常,深度学习在复杂的环境下更能取得好的效果. ...
1
... 随着深度学习在图像处理领域的快速发展,各种图像分类、目标检测以及分割的模型在各自的领域内都取得较好的效果,Faster RCNN[12 ] 、YOLO[13 ] 、SSD[14 ] 等方法相比传统的图像检测方法具备更高的鲁棒性. 通常,深度学习在复杂的环境下更能取得好的效果. ...
基于 LeNet-5 模型的太阳能电池板缺陷识别分类
1
2019
... 深度学习在上述问题上得到了大量应用. 吴涛等[15 ] 通过改进LeNet-5模型对光伏图像进行故障检测,以解决故障分类数少导致的欠拟合. 郭梦浩等[16 ] 通过Faster RCNN的方法,通过对于图像预处理和迁移学习方法的应用,对Faster RCNN进行了改进,相比于原始的Faster RCNN检测率提高了4.51%,在测试集上,取得了97.34%的平均检测率. Greco等[17 ] 通过YOLO框架实现热斑检测,在18个不同的数据集上均得到了有效的结果,得到了95%的准确率. 上述这些方法在组件的提取和分类上表现出比传统方法更好的效果,能处理复杂背景下的图片信息,解决了传统检测方法中的泛化能力差和准确率不足的问题,但其模型的参数数量过大,对硬件也有较高的需求. ...
基于 LeNet-5 模型的太阳能电池板缺陷识别分类
1
2019
... 深度学习在上述问题上得到了大量应用. 吴涛等[15 ] 通过改进LeNet-5模型对光伏图像进行故障检测,以解决故障分类数少导致的欠拟合. 郭梦浩等[16 ] 通过Faster RCNN的方法,通过对于图像预处理和迁移学习方法的应用,对Faster RCNN进行了改进,相比于原始的Faster RCNN检测率提高了4.51%,在测试集上,取得了97.34%的平均检测率. Greco等[17 ] 通过YOLO框架实现热斑检测,在18个不同的数据集上均得到了有效的结果,得到了95%的准确率. 上述这些方法在组件的提取和分类上表现出比传统方法更好的效果,能处理复杂背景下的图片信息,解决了传统检测方法中的泛化能力差和准确率不足的问题,但其模型的参数数量过大,对硬件也有较高的需求. ...
基于Faster RCNN的红外热图像热斑缺陷检测研究
1
2019
... 深度学习在上述问题上得到了大量应用. 吴涛等[15 ] 通过改进LeNet-5模型对光伏图像进行故障检测,以解决故障分类数少导致的欠拟合. 郭梦浩等[16 ] 通过Faster RCNN的方法,通过对于图像预处理和迁移学习方法的应用,对Faster RCNN进行了改进,相比于原始的Faster RCNN检测率提高了4.51%,在测试集上,取得了97.34%的平均检测率. Greco等[17 ] 通过YOLO框架实现热斑检测,在18个不同的数据集上均得到了有效的结果,得到了95%的准确率. 上述这些方法在组件的提取和分类上表现出比传统方法更好的效果,能处理复杂背景下的图片信息,解决了传统检测方法中的泛化能力差和准确率不足的问题,但其模型的参数数量过大,对硬件也有较高的需求. ...
基于Faster RCNN的红外热图像热斑缺陷检测研究
1
2019
... 深度学习在上述问题上得到了大量应用. 吴涛等[15 ] 通过改进LeNet-5模型对光伏图像进行故障检测,以解决故障分类数少导致的欠拟合. 郭梦浩等[16 ] 通过Faster RCNN的方法,通过对于图像预处理和迁移学习方法的应用,对Faster RCNN进行了改进,相比于原始的Faster RCNN检测率提高了4.51%,在测试集上,取得了97.34%的平均检测率. Greco等[17 ] 通过YOLO框架实现热斑检测,在18个不同的数据集上均得到了有效的结果,得到了95%的准确率. 上述这些方法在组件的提取和分类上表现出比传统方法更好的效果,能处理复杂背景下的图片信息,解决了传统检测方法中的泛化能力差和准确率不足的问题,但其模型的参数数量过大,对硬件也有较高的需求. ...
1
... 深度学习在上述问题上得到了大量应用. 吴涛等[15 ] 通过改进LeNet-5模型对光伏图像进行故障检测,以解决故障分类数少导致的欠拟合. 郭梦浩等[16 ] 通过Faster RCNN的方法,通过对于图像预处理和迁移学习方法的应用,对Faster RCNN进行了改进,相比于原始的Faster RCNN检测率提高了4.51%,在测试集上,取得了97.34%的平均检测率. Greco等[17 ] 通过YOLO框架实现热斑检测,在18个不同的数据集上均得到了有效的结果,得到了95%的准确率. 上述这些方法在组件的提取和分类上表现出比传统方法更好的效果,能处理复杂背景下的图片信息,解决了传统检测方法中的泛化能力差和准确率不足的问题,但其模型的参数数量过大,对硬件也有较高的需求. ...
1
... 深度网络通常需要大量的参数[18 ] ,对硬件的需求较高. 而传统的图像检测方法基于统计特征进行分类,信息损失大. 基于此,本研究提出一种传统图像处理与深度学习分类模型相结合的二阶段缺陷自动识别方法,主要贡献如下:1)搭建了一种加载红外相机的无人机巡检平台,通过畸变矫正算法降低组件安装角度和现场拍摄抖动畸变问题给航拍图像带来的影响. 2)提出针对红外图像的二阶段热斑目标检测方法. 基于前后景灰度差异、组件形态学特征之类的先验信息的边缘检测方法,对组件轮廓进行分割;基于EfficientNet的分类识别模型,对模型深度和宽度结构根据具体数据集的特征尺度进行自适应的搜索调整,实现高精度热斑识别. 3)搭建了一个用于红外巡检的无人机平台,并收集了一个包含标注的光伏组件红外数据集,该数据可以提供给非商业用途的研究. ...
A computational approach to edge detection
1
1986
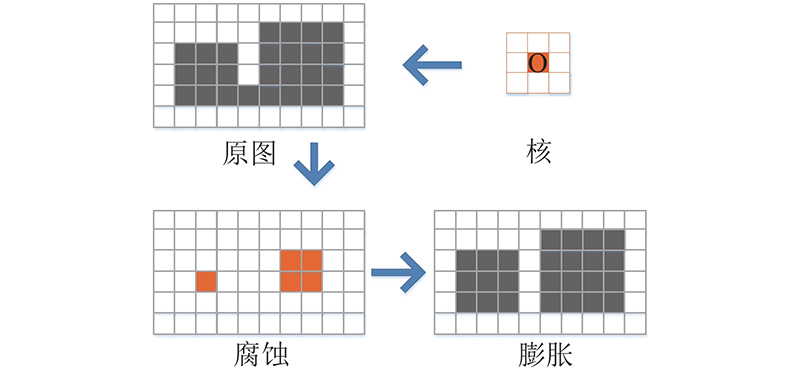
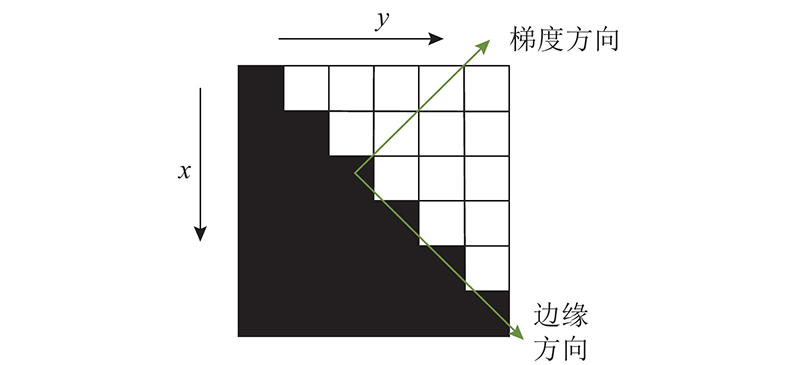
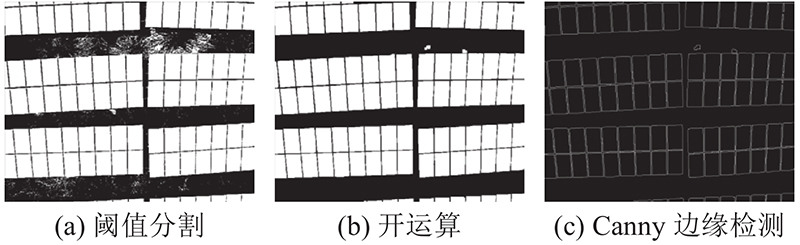
... 去噪后使用Canny边缘检测算法检测轮廓,Canny检测算法[19 -21 ] 一般是基于sobel算子,通过sobel水平和垂直算子与输入图像卷积,计算得到d x d y
Topological structural analysis of digitized binary images by border following
0
1985
GrabCut: interactive foreground extraction using iterated graph cuts
1
2004
... 去噪后使用Canny边缘检测算法检测轮廓,Canny检测算法[19 -21 ] 一般是基于sobel算子,通过sobel水平和垂直算子与输入图像卷积,计算得到d x d y
2
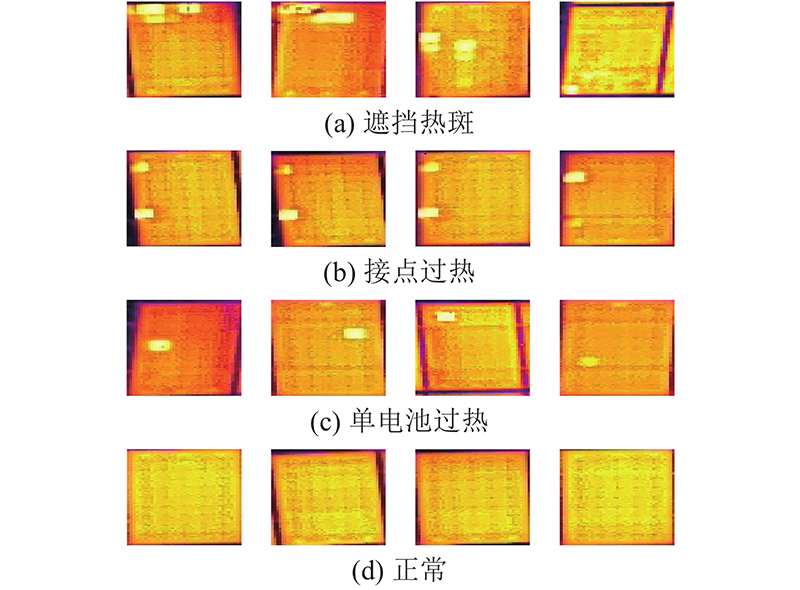
... 为了对提取得到的样本集进行精确的热斑识别,获得高精度的热斑判据,根据IEC技术规范[22 ] 将热斑由成因分为如图6 所示的4类,从而实现高精度的组件热斑诊断和热斑成因分类. ...
... 遮挡热斑(见图6 (a))是指组件表面有异物遮挡而引起,组件最高温度超过平均温度2度以上;接点过热(见图6 (b))是指组件间金属连接点温度超过周围3 °C以上;单电池过热(见图6 (c))指由电池破损引起的缺陷,表现为温差在10 °C以上热斑[22 ] ;如图6 (d)所示为正常组件. 由于图6 (a)~(c)都会对组件的正常运行产生危害,将这3类组件定义为热斑缺陷组件. ...
1
... 从而可以得到一系列网络模型,将其称为EfficientNets[23 ] . 其中EfficientNet-B0的网络结构如表1 所示. 表中,S 、C 、L 分别为输入大小、输出通道数、层数. 其中深度可分离卷积会通过将乘法转化为加法,在保证精度的情况下,大大降低运算成本. 以交叉熵作为损失函数,表达式如下: ...
LSD: a line segment detector
1
2012
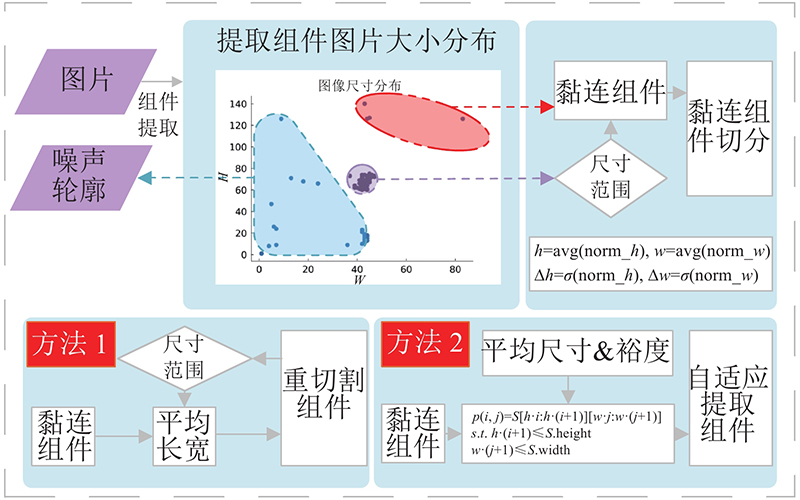
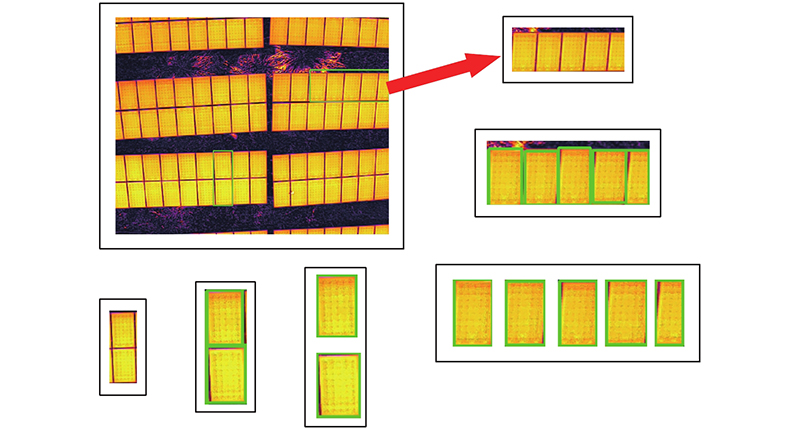
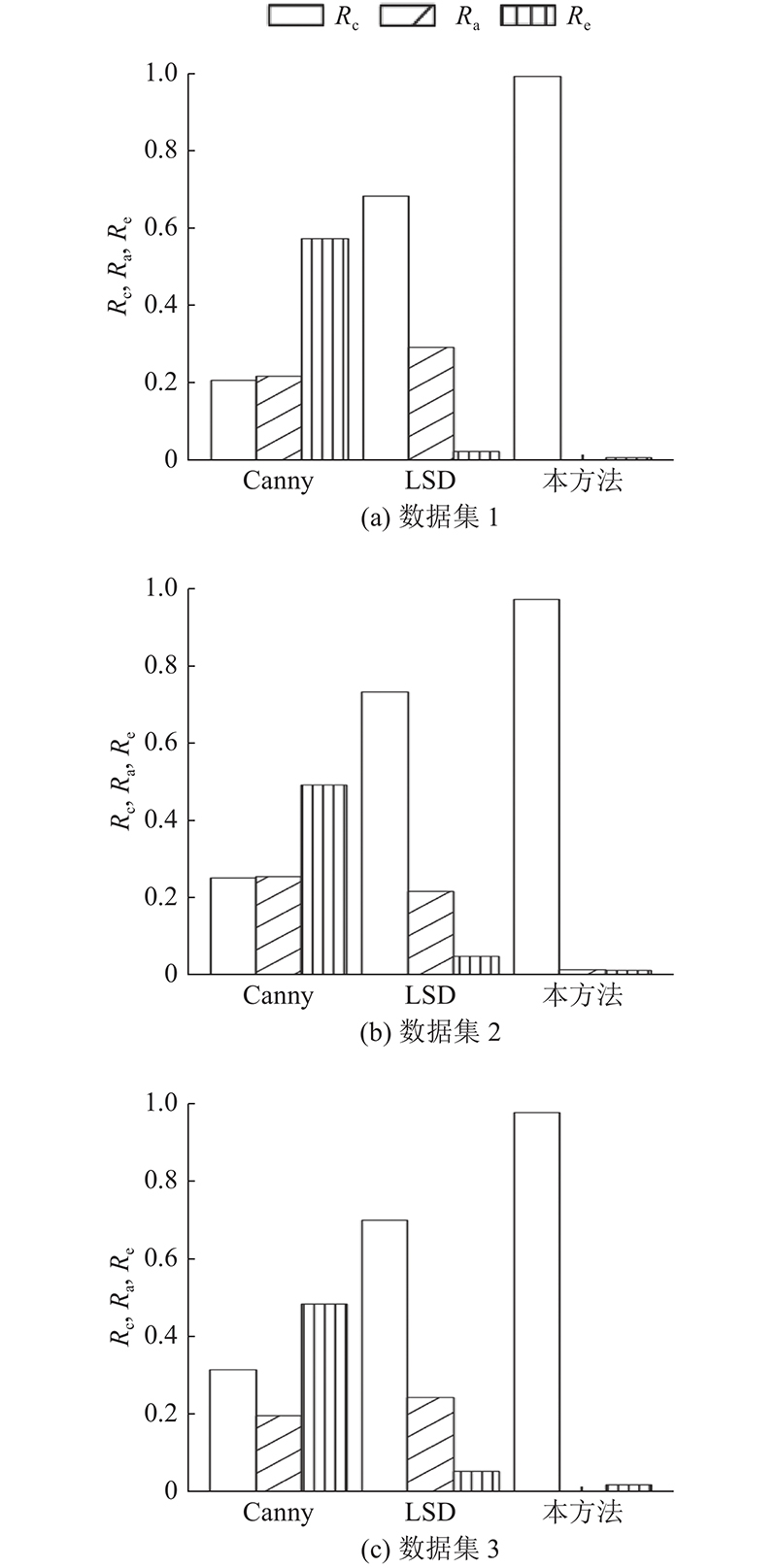
... 在第1阶段的组件提取任务中,分别在带干扰的稀疏和稠密组串图像集上,将本方法与仅使用Canny和LSD[24 ] 提取组件的效果进行对比(见图10 ). 可以看出,相比于Canny和LSD,本方法在组串稀疏分布时的抗干扰能力和稠密分布时的提取率都更优. 最后对全数据集中组件提取效果在正确检出率R c 、黏连组件率R a 和错误检出率R e 上与传统检测方法进行比较,结果如图11 所示. 可以看出,本方法在数据集1中达到99.3%的正确检出率,此外在数据集2、3中也达到97.3%、97.9%,说明本方法的高效检测具有泛化性. ...
1
... 在第2阶段的组件分类方面,如表2 所示,在精确率、召回率、准确率、模型参数大小P 以及模型运行时梯度传播所需的内存Me这5个指标上,将EfficientNet与常用的CNN网络VGG[25 ] 、ResNet[26 ] 、DenseNet[27 ] 和轻量化网络SqueezeNet[28 ] 、MobileNet[29 ] 、ShuffleNet[30 ] 进行比较. 可以看出,在基于提取组件的热斑缺陷检测中,EfficientNet在组件热斑是否存在的检测任务上召回率达到100%,准确率达到99.74%,在分类性能上优于其他模型. 相较于VGG、ResNet和DenseNet,EfficientNet在召回率上提升了0.5%~1.0%,在准确率上也有一定提高. 在模型参数大小上,EfficientNet明显更小更加轻量化,能够布置在硬件条件受限的环境下. 相较于SqueezeNet、MobileNet和ShuffleNet这些轻量化网络,EfficientNet在精确率和召回率上提升更多. 在模型参数大小上虽然大于MobileNet、ShuffleNet,但在运行内存上,EfficientNet远小于前两者,在实际运行时也更快. 因此相较于这些轻量化网络,EfficientNet具有准确率更高且运行速度更快的优势. ...
1
... 在第2阶段的组件分类方面,如表2 所示,在精确率、召回率、准确率、模型参数大小P 以及模型运行时梯度传播所需的内存Me这5个指标上,将EfficientNet与常用的CNN网络VGG[25 ] 、ResNet[26 ] 、DenseNet[27 ] 和轻量化网络SqueezeNet[28 ] 、MobileNet[29 ] 、ShuffleNet[30 ] 进行比较. 可以看出,在基于提取组件的热斑缺陷检测中,EfficientNet在组件热斑是否存在的检测任务上召回率达到100%,准确率达到99.74%,在分类性能上优于其他模型. 相较于VGG、ResNet和DenseNet,EfficientNet在召回率上提升了0.5%~1.0%,在准确率上也有一定提高. 在模型参数大小上,EfficientNet明显更小更加轻量化,能够布置在硬件条件受限的环境下. 相较于SqueezeNet、MobileNet和ShuffleNet这些轻量化网络,EfficientNet在精确率和召回率上提升更多. 在模型参数大小上虽然大于MobileNet、ShuffleNet,但在运行内存上,EfficientNet远小于前两者,在实际运行时也更快. 因此相较于这些轻量化网络,EfficientNet具有准确率更高且运行速度更快的优势. ...
1
... 在第2阶段的组件分类方面,如表2 所示,在精确率、召回率、准确率、模型参数大小P 以及模型运行时梯度传播所需的内存Me这5个指标上,将EfficientNet与常用的CNN网络VGG[25 ] 、ResNet[26 ] 、DenseNet[27 ] 和轻量化网络SqueezeNet[28 ] 、MobileNet[29 ] 、ShuffleNet[30 ] 进行比较. 可以看出,在基于提取组件的热斑缺陷检测中,EfficientNet在组件热斑是否存在的检测任务上召回率达到100%,准确率达到99.74%,在分类性能上优于其他模型. 相较于VGG、ResNet和DenseNet,EfficientNet在召回率上提升了0.5%~1.0%,在准确率上也有一定提高. 在模型参数大小上,EfficientNet明显更小更加轻量化,能够布置在硬件条件受限的环境下. 相较于SqueezeNet、MobileNet和ShuffleNet这些轻量化网络,EfficientNet在精确率和召回率上提升更多. 在模型参数大小上虽然大于MobileNet、ShuffleNet,但在运行内存上,EfficientNet远小于前两者,在实际运行时也更快. 因此相较于这些轻量化网络,EfficientNet具有准确率更高且运行速度更快的优势. ...
1
... 在第2阶段的组件分类方面,如表2 所示,在精确率、召回率、准确率、模型参数大小P 以及模型运行时梯度传播所需的内存Me这5个指标上,将EfficientNet与常用的CNN网络VGG[25 ] 、ResNet[26 ] 、DenseNet[27 ] 和轻量化网络SqueezeNet[28 ] 、MobileNet[29 ] 、ShuffleNet[30 ] 进行比较. 可以看出,在基于提取组件的热斑缺陷检测中,EfficientNet在组件热斑是否存在的检测任务上召回率达到100%,准确率达到99.74%,在分类性能上优于其他模型. 相较于VGG、ResNet和DenseNet,EfficientNet在召回率上提升了0.5%~1.0%,在准确率上也有一定提高. 在模型参数大小上,EfficientNet明显更小更加轻量化,能够布置在硬件条件受限的环境下. 相较于SqueezeNet、MobileNet和ShuffleNet这些轻量化网络,EfficientNet在精确率和召回率上提升更多. 在模型参数大小上虽然大于MobileNet、ShuffleNet,但在运行内存上,EfficientNet远小于前两者,在实际运行时也更快. 因此相较于这些轻量化网络,EfficientNet具有准确率更高且运行速度更快的优势. ...
1
... 在第2阶段的组件分类方面,如表2 所示,在精确率、召回率、准确率、模型参数大小P 以及模型运行时梯度传播所需的内存Me这5个指标上,将EfficientNet与常用的CNN网络VGG[25 ] 、ResNet[26 ] 、DenseNet[27 ] 和轻量化网络SqueezeNet[28 ] 、MobileNet[29 ] 、ShuffleNet[30 ] 进行比较. 可以看出,在基于提取组件的热斑缺陷检测中,EfficientNet在组件热斑是否存在的检测任务上召回率达到100%,准确率达到99.74%,在分类性能上优于其他模型. 相较于VGG、ResNet和DenseNet,EfficientNet在召回率上提升了0.5%~1.0%,在准确率上也有一定提高. 在模型参数大小上,EfficientNet明显更小更加轻量化,能够布置在硬件条件受限的环境下. 相较于SqueezeNet、MobileNet和ShuffleNet这些轻量化网络,EfficientNet在精确率和召回率上提升更多. 在模型参数大小上虽然大于MobileNet、ShuffleNet,但在运行内存上,EfficientNet远小于前两者,在实际运行时也更快. 因此相较于这些轻量化网络,EfficientNet具有准确率更高且运行速度更快的优势. ...
1
... 在第2阶段的组件分类方面,如表2 所示,在精确率、召回率、准确率、模型参数大小P 以及模型运行时梯度传播所需的内存Me这5个指标上,将EfficientNet与常用的CNN网络VGG[25 ] 、ResNet[26 ] 、DenseNet[27 ] 和轻量化网络SqueezeNet[28 ] 、MobileNet[29 ] 、ShuffleNet[30 ] 进行比较. 可以看出,在基于提取组件的热斑缺陷检测中,EfficientNet在组件热斑是否存在的检测任务上召回率达到100%,准确率达到99.74%,在分类性能上优于其他模型. 相较于VGG、ResNet和DenseNet,EfficientNet在召回率上提升了0.5%~1.0%,在准确率上也有一定提高. 在模型参数大小上,EfficientNet明显更小更加轻量化,能够布置在硬件条件受限的环境下. 相较于SqueezeNet、MobileNet和ShuffleNet这些轻量化网络,EfficientNet在精确率和召回率上提升更多. 在模型参数大小上虽然大于MobileNet、ShuffleNet,但在运行内存上,EfficientNet远小于前两者,在实际运行时也更快. 因此相较于这些轻量化网络,EfficientNet具有准确率更高且运行速度更快的优势. ...
Spatial pyramid pooling in deep convolutional networks for visual recognition
1
2014
... 为了整体上验证算法在热斑组件目标检测任务中的性能优势,将本方法与一阶段目标检测方法YOLO-V3、SSD和二阶段目标检测方法Faster-RCNN、SPP-Net[31 ] 在运算速度v 和PR曲线上进行比较,如图12 所示. 可以看出,方法第1阶段中像素级的高精度组件定位,使得本方法在精确率和召回率上具有更优的性能. 第2阶段中EfficientNet能够调整出更适应数据集的模型结构,在同等算力下,较通用的图像分类模型,有可观的性能提升. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}