

目前磁流变阻尼力的跟踪方式主要有前馈[1,5-7]、反馈[4,8-9]和前馈/反馈控制[10]. 前馈控制利用磁流变阻尼器的逆向动力学模型实现跟踪控制. 在建立这种高度非线性的逆模型之前,须建立表征非线性滞回特性、温升效应、激励电流和活塞相对运动关系的磁流变阻尼器正向动力学模型,如Bingham模型[5]、Bouc-Wen模型[7]、魔术公式模型[1]、RC算子模型[6]和神经网络模型[11]等,然后在此基础上进行逆向建模,得到阻尼器的控制电流. 然而,阻尼器存在的温升、漏油和磁流变液沉降问题,会导致实验建立的稳态正向动力学模型在服役时存在模型失配和参数不确定性问题,难以满足高可靠性和高精度阻尼力跟踪的需求[12-13]. 虽然可以通过增加参数和复杂度提高模型的精度,但会增加成本,并且使得求逆过程较困难.
目前磁流变阻尼器的反馈控制策略有:基于Heaviside阶跃函数的控制[8](Heaviside function damper controller,HFC)、基于符号函数的控制[4](signum function damper controller,SFC)和连续状态控制[9](continuous-state damper controller,CSC). HFC力跟踪是常用的阻尼力闭环反馈控制方法,在控制周期内,其控制量只有2个状态:当实际阻尼力幅值小于期望阻尼力幅值且两者方向相同时,施加最大控制电压;否则切换为零. 由于控制电压在最大值和最小值之间高频切换,控制的阻尼力存在高频振荡现象. Wang等[4]对其进行改进,提出基于N个符号函数的SFC力跟踪控制策略,但振荡问题依然难以避免. Sims等[9]提出的CSC是一种比例反馈控制策略,可以得到光滑的阻尼力,但对某些类型的阻尼力跟踪存在静态误差.
为了同时利用前馈和反馈控制的优点,Weber[10]提出磁流变阻尼器前馈/反馈复合控制(feedforward/feedback control, FFFBC)策略,将逆向模型的预测电流作为前馈控制,进而通过反馈控制对跟踪误差进行校正.
本研究提出一种无需阻尼器建模的无模型前馈/反馈控制(model-free feedforward/feedback control, MFFFFBC)策略,利用Speedgoat实时目标仿真机搭建磁流变阻尼器控制试验系统,通过试验揭示经典HFC存在的阻尼力高频振荡现象,进而针对HFC中控制电压高频振荡的问题提出将阻尼器前一时刻的控制进行采样保持作为前馈控制量并利用阻尼力跟踪误差信号对其进行实时反馈修正,从而建立结构简单、开放性强和实现容易的磁流变阻尼器无模型连续光滑控制算法。
1. 磁流变阻尼器控制试验系统
磁流变阻尼器控制试验系统如图1所示. 试验系统主要包括Speedgoat实时目标仿真机、机械式疲劳试验机、磁流变阻尼器、LVDT位移传感器、拉压力传感器、电流驱动器和直流电源等. 其中Speedgoat实时目标仿真机是瑞士Speedgoat公司开发和制造的基于Simulink Real-TimeTM实时操作系统,无缝兼容 Matlab/Simulink® 开发环境的实时仿真和测试平台,具有与dSPACE系统完全相同的功能.
图 1
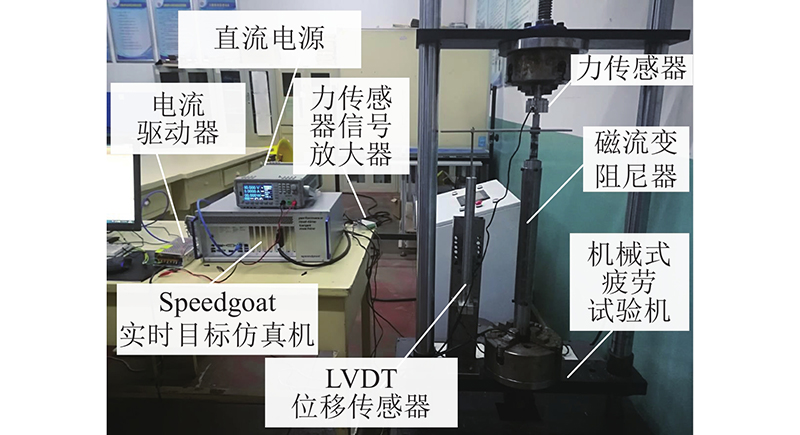
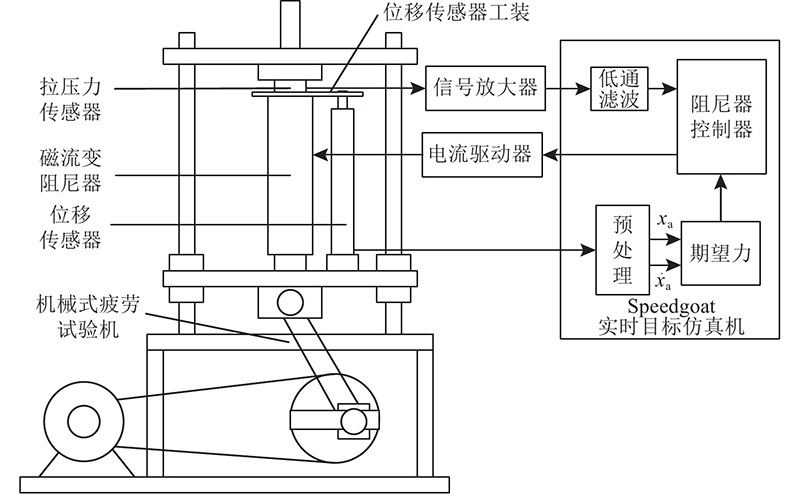
磁流变阻尼器控制试验由机械式疲劳试验机带动阻尼器运动;将LVDT位移传感器(量程0~100 mm,精度0.05%)和带有信号放大器(量程±10 V,精度0.1%)的拉压力传感器(量程±10 kN,精度0.5%)的输出连接到Speedgoat实时目标仿真机的A/D接口,通过低通滤波和信号调理,得到期望的阻尼力和实际阻尼力;然后由阻尼器控制器运算得到期望的控制电压,并经Speedgoat实时目标仿真机的D/A接口,作为磁流变阻尼器电流驱动器的控制电压;进而通过调节电流的大小实现阻尼器的闭环控制,试验系统原理如图2所示.
图 2
在试验时,Speedgoat实时目标仿真机的采样频率为1000 Hz;选取黏性阻尼力和摩擦阻尼力进行跟踪控制,其表达式分别为
式中:
2. 磁流变阻尼器HFC
本研究所提出的阻尼器无模型控制策略思想来源于HFC试验. HFC的控制律[8]如下:
式中:
图 3
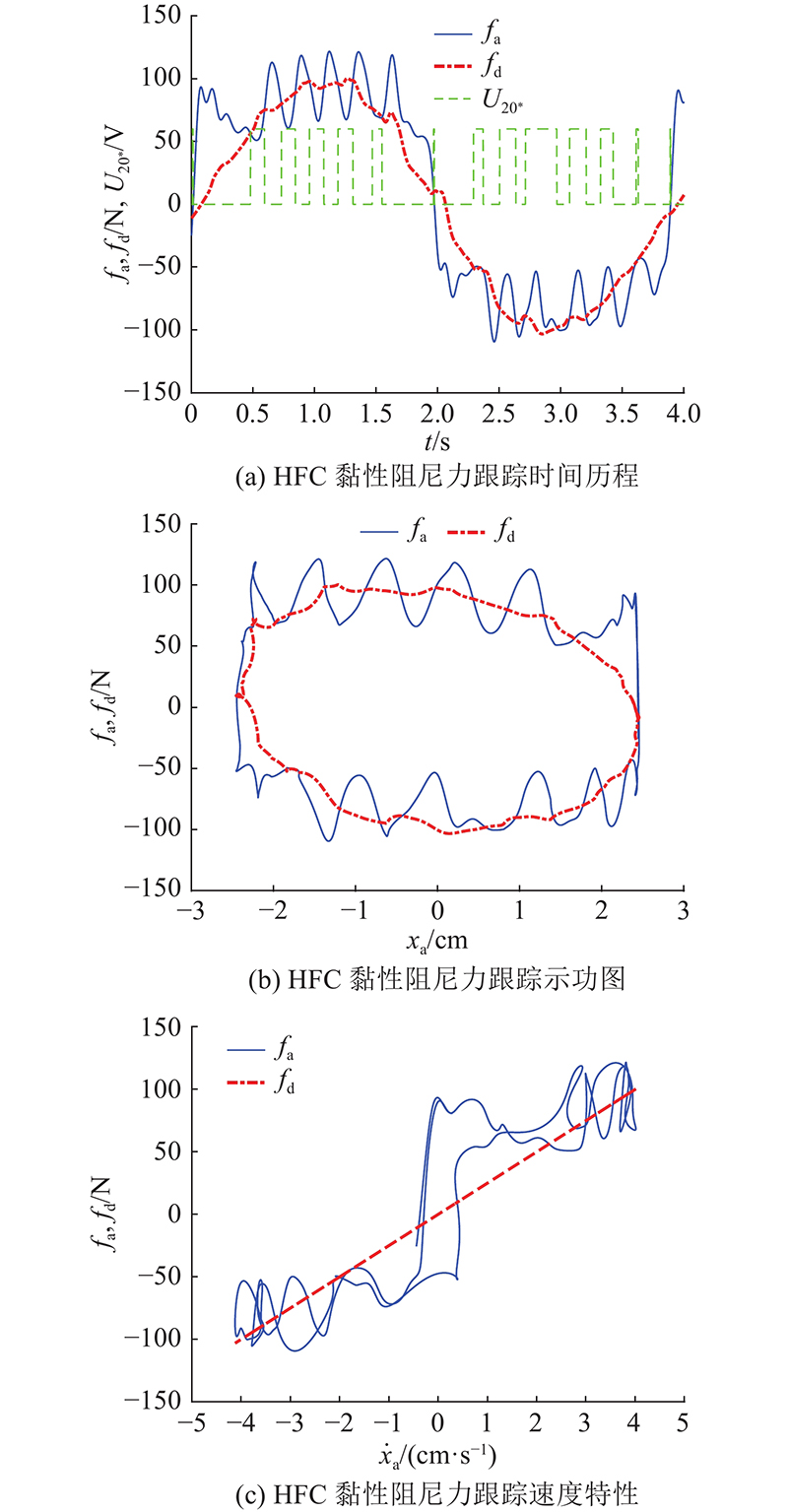
图 3 HFC黏性阻尼力跟踪控制实验结果
Fig.3 Experimental results of force tracking of viscous damping with HFC
图 4
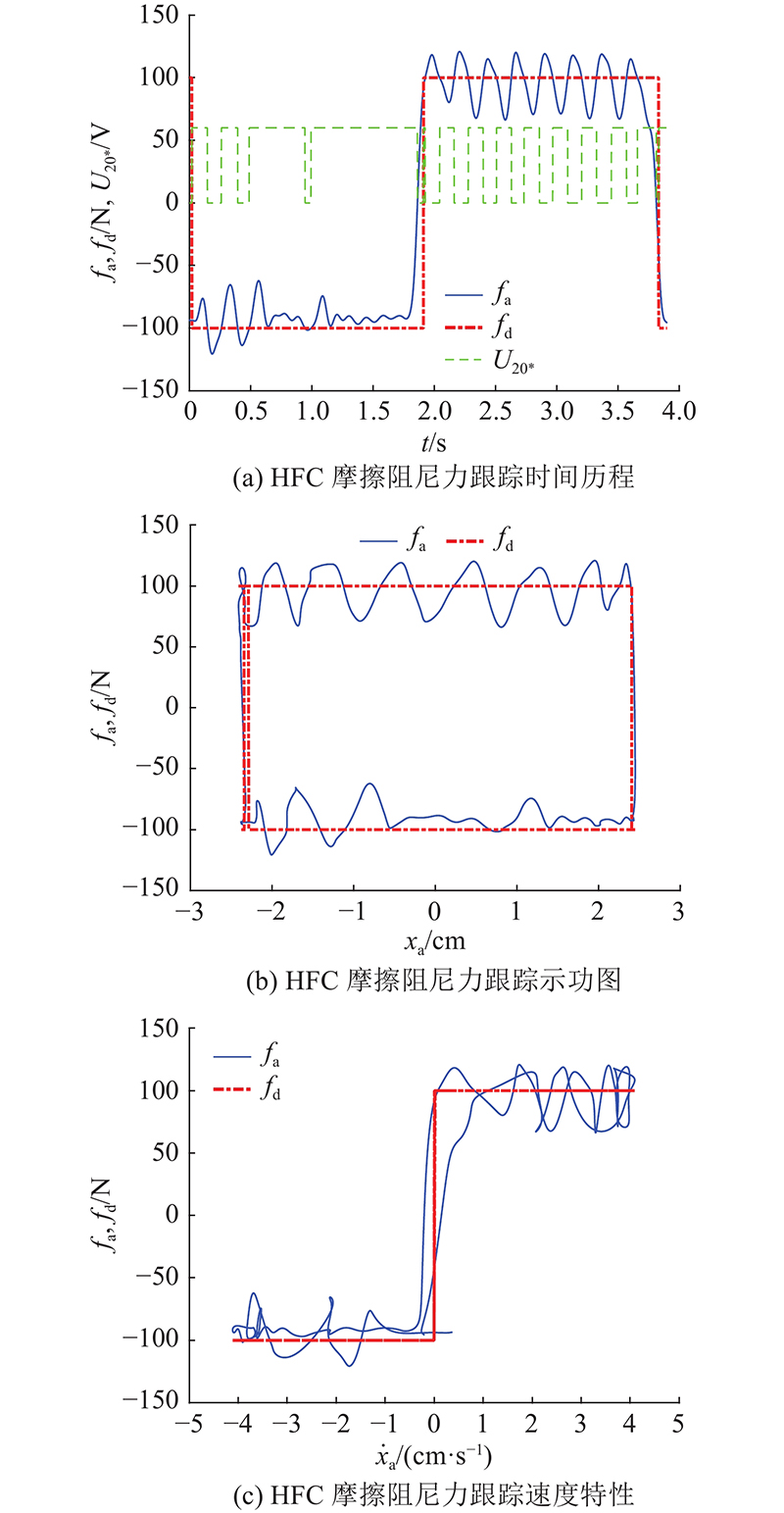
图 4 HFC摩擦阻尼力跟踪控制实验结果
Fig.4 Experimental results of force tracking of friction damping with HFC
3. 磁流变阻尼器MFFFFBC
HFC力跟踪存在难以避免的阻尼力振荡冲击,容易造成阻尼器的密封失效、引起漏油故障,同时也会对系统的振动控制带来不利影响. 阻尼力振荡的原因主要在于HFC只有最大和最小2个离散控制模态,而磁流变阻尼器是半主动作动器,常规的控制技术不能直接进行应用. 本研究对HFC进行改进,发展了MFFFFBC,其基本思想如下.
假设在某一时间段内fa>0(如图3(a)中 0~1.8 s):对于某一时刻k,当fa(k)<fd(k)时,存在控制v(k),v(k+1), v(k+2)
对于fa(k+m)<0的情况:当e(k+m)>0时,继续增加电流会增大跟踪误差,故vfc(k+m)<0;同理,当e(k+m)<0时,vfc(k+m)>0.
考虑到控制电流的幅值限制,磁流变阻尼器的无模型前馈/反馈控制策略可以总结为
式中:sat为饱和函数,最小值为0,最大值为磁流变阻尼器允许的最大控制电压;sgn为符号函数;初始时刻的前馈控制设置为0.
4. 磁流变阻尼器MFFFFBC试验
MFFFFBC的反馈控制可以直接采用任意反馈控制技术. 为了体现MFFFFBC结构简单和容易实现的优点,本研究仅采用经典PID作为反馈控制,其中参数如下:
图 5
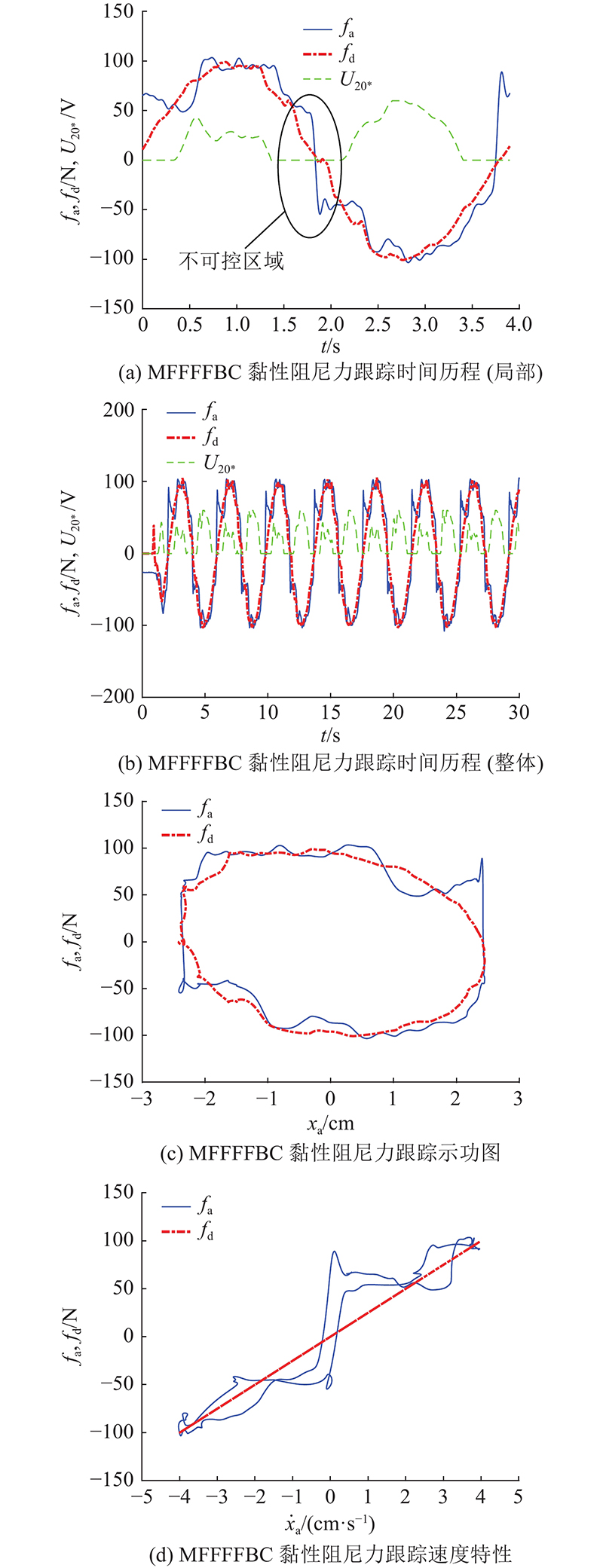
图 5 MFFFFBC黏性阻尼力跟踪控制实验结果
Fig.5 Experimental results of force tracking of viscous damping with MFFFFBC
图 6
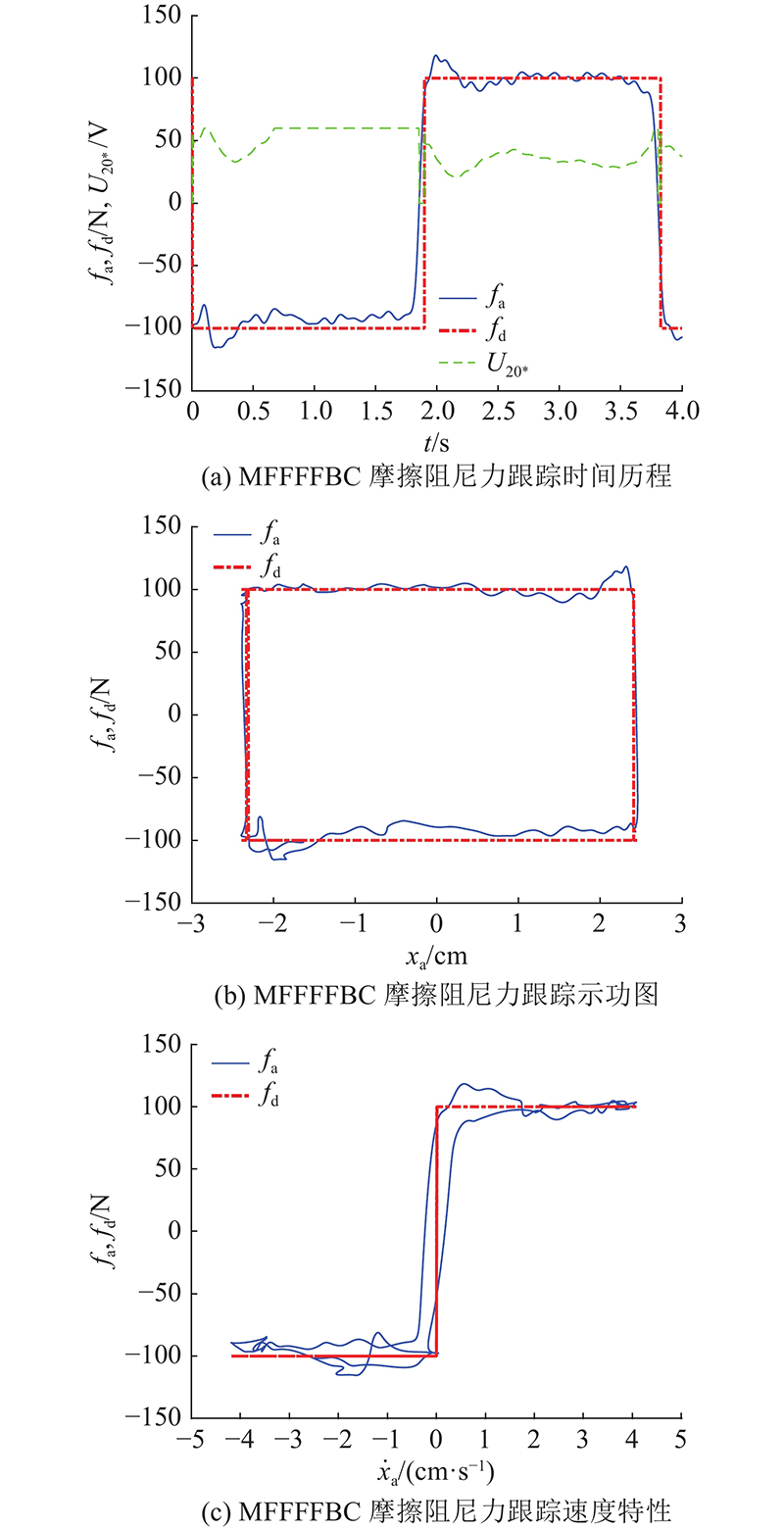
图 6 MFFFFBC摩擦阻尼力跟踪控制实验结果
Fig.6 Experimental results of force tracking of friction damping with MFFFFBC
影响阻尼力跟踪误差的因素较多,如测量噪声、不可控阻尼力和磁流变阻尼器加工质量等. 为了评价控制策略的跟踪效果,对跟踪误差进行概率密度函数(probability density function,PDF)分布分析,如图7所示. 图中,P为概率. 对于黏性阻尼力跟踪,MFFFFBC有82.46%在绝对误差25 N内,相比HFC提高了21.98%;对于摩擦阻尼力跟踪,MFFFFBC有90.23%在绝对误差15 N内,相比HFC提高了26.64%.
图 7
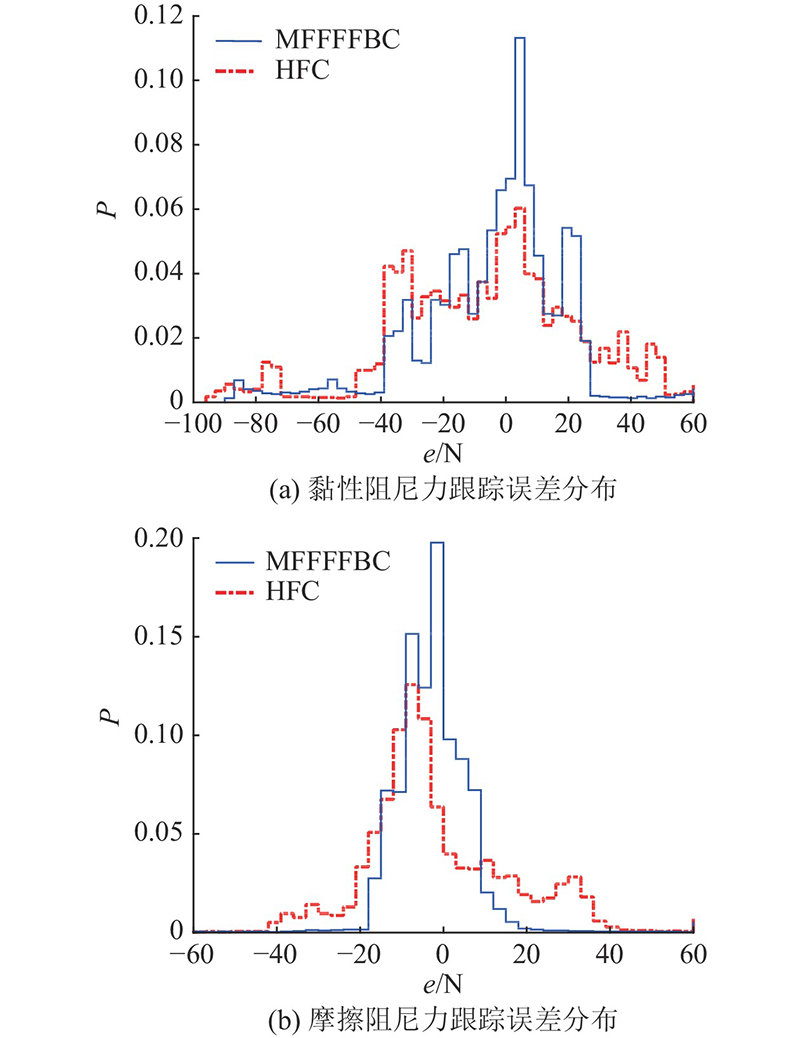
图 7 阻尼力跟踪误差概率密度分布
Fig.7 Probability density distribution of damping force tracking error
5. 结 语
基于Speedgoat实时目标仿真机搭建磁流变阻尼器快速控制原型试验平台,通过试验揭示了HFC存在的阻尼力高频振荡问题,进而提出结构简单、开放性强和实现容易的MFFFFBC磁流变阻尼力光滑跟踪控制策略,并通过试验验证了算法的有效性. 试验结果表明,MFFFFBC黏性阻尼力和摩擦阻尼力跟踪误差相比经典的HFC力跟踪算法分别降低了21.98%和26.64%,实现了无模型磁流变阻尼力的精确跟踪控制. 本研究结果对于促进磁流变技术的工程化应用具有重要的现实意义.
下一步将开展如下研究工作:1)结合响应速度更快和超调量更小的高效非线性反馈控制技术提高磁流变阻尼力跟踪的精度;2)研究集成力传感器的阻尼力自传感磁流变阻尼器的原理及结构,为提高结构振动控制的性能及可靠性奠定理论与技术基础.
参考文献
磁流变减振器魔术公式模型在悬架控制中的应用
[J].DOI:10.3969/j.issn.1004-132X.2020.14.003 [本文引用: 3]
Suspension control applications of magnetorheological damper formula model
[J].DOI:10.3969/j.issn.1004-132X.2020.14.003 [本文引用: 3]
自传感磁流变阻尼器实时阻尼力跟踪控制
[J].
Real-time damping-force tracking control of self-sensing magnetorheological dampers
[J].
基于多场耦合分析的磁流变阻尼器建模与结构参数影响
[J].
Modeling of MR damper based on multi-field coupling analysis and influence of structural parameters
[J].
Semiactive controllers for magnetorheological fluid dampers
[J].
Nonlinear modelling of an electro-rheological vibration damper
[J].DOI:10.1016/0304-3886(87)90056-8 [本文引用: 2]
Phenomenological model for magnetorheological dampers
[J].DOI:10.1061/(ASCE)0733-9399(1997)123:3(230) [本文引用: 1]
Resistor-capacitor (RC) operator-based hysteresis model for magnetorheological (MR) dampers
[J].DOI:10.1016/j.ymssp.2018.07.050 [本文引用: 2]
Modeling and control of magnetorheological dampers for seismic response reduction
[J].DOI:10.1088/0964-1726/5/5/006 [本文引用: 3]
Controllable viscous damping: an experimental study of an electrorheological long-stroke damper under proportional feedback control
[J].DOI:10.1088/0964-1726/8/5/311 [本文引用: 3]
Robust force tracking control scheme for MR dampers
[J].DOI:10.1002/stc.1750 [本文引用: 2]
Neural network modeling of a magnetorheological damper
[J].DOI:10.1177/1045389X9800900908 [本文引用: 1]
磁流变阻尼器力学性能降低原因分析
[J].
Analysis on mechanical properties reduce of magnetorheological damper
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}