[1]
JIA K, JIANG W, LI J Spectral matching based on discrete particle swarm optimization: a new method for terrestrial water body extraction using multi-temporal Landsat 8 images
[J]. Remote Sensing of Environment , 2018 , 209 : 1 - 18
DOI:10.1016/j.rse.2018.02.012
[本文引用: 1]
[2]
STABLER L B Management regimes affect woody plant productivity and water use efficiency in an urban desert ecosystem
[J]. Urban Ecosystems , 2008 , 11 (2 ): 197 - 211
DOI:10.1007/s11252-008-0050-2
[本文引用: 1]
[3]
YANG F, GUO J H, TAN H Automated extraction of urban water bodies from ZY-3 multi-spectral imagery
[J]. Water , 2017 , 9 (2 ): 144
DOI:10.3390/w9020144
[本文引用: 1]
[4]
徐涵秋 利用改进的归一化差异水体指数( MNDWI) 提取水体信息的研究
[J]. 遥感学报 , 2005 , 9 (5 ): 589 - 595
[本文引用: 1]
XU Han-qiu By using the improved normalized difference water index (MNDWI) to extract water body information research
[J]. Remote Sensing , 2005 , 9 (5 ): 589 - 595
[本文引用: 1]
[5]
LIRA J. Segmentation and morphology of open water bodies from multispectral images [J]. International Journal of Remote Sensing . 2006, 27(18): 4015-4038.
[本文引用: 1]
[6]
GAUTAM V K, GAURAV P K, MURUGAN P, et al Assessment of surface water dynamics in Bangalore using WRI, NDWI, MNDWI, supervised classification and K-T transformation
[J]. Aquatic Procedia , 2015 , 4 : 739 - 746
DOI:10.1016/j.aqpro.2015.02.095
[本文引用: 1]
[7]
BRYANT R G, RAINEY M P. Investigation of flood inundation on playas within the zone of Chotts, using a time-series of AVHRR [J]. Remote Sensing of Environment . 2002, 82(2/3): 360–375.
[本文引用: 1]
[8]
范亚洲, 张珂, 刘林鑫, 等 水库水体的最大类间方差迭代遥感提取方法
[J]. 水资源保护 , 2021 , 37 (3 ): 50 - 55
[本文引用: 1]
FAN Ya-zhou, ZHANG Ke, LIU Lin-xin, et al Maximum inter-class variance iterative remote sensing extraction method for reservoir water bodies
[J]. Water Resources Protection , 2021 , 37 (3 ): 50 - 55
[本文引用: 1]
[9]
孙芳 遥感图像水体识别方法的比较与改进
[J]. 遥感技术 , 2012 , 33 : 6854 - 6875
[本文引用: 1]
SUN Fang Comparison and improvement of water body recognition methods in remote sensing images
[J]. Remote Sensing Technology , 2012 , 33 : 6854 - 6875
[本文引用: 1]
[10]
CHEN Y, FAN R, YANG X, et al Extraction of urban water bodies from high-resolution remote-sensing imagery using deep learning
[J]. Water , 2018 , 10 (5 ): 585
DOI:10.3390/w10050585
[本文引用: 1]
[11]
何红术, 黄晓霞, 李红旮 基于改进U-Net网络的高分遥感影像水体提取
[J]. 地球信息科学学报 , 2020 , 22 (10 ): 2010 - 2022
[本文引用: 1]
HE Hong-shu, HUANG Xiao-xia, LI Hong-ga High resolution remote sensing image water extraction based on improved U-Net network
[J]. Journal of Geo-information Science , 2020 , 22 (10 ): 2010 - 2022
[本文引用: 1]
[12]
秦慧杰, 高磊, 梁文广, 等 面向对象的无人机影像水体变化监测方法
[J]. 水土保持通报 , 2018 , 36 (4 ): 67 - 71
[本文引用: 7]
QIN Hui-jie, GAO Lei, LIANG Wen-guang, et al Object-oriented method for monitoring water body change in UAV image
[J]. Bulletin of Soil and Water Conservation , 2018 , 36 (4 ): 67 - 71
[本文引用: 7]
[14]
PERONA P, MALIK J Scale-space and edge detection using anisotropic diffusion
[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence , 1990 , 12 (7 ): 629 - 639
[本文引用: 1]
[15]
李艳华. 基于国产高分一号影像的新疆山区河流及桥梁信息提取技术研究 [D]. 乌鲁木齐: 新疆大学, 2015.
[本文引用: 1]
LI Yan-hua. Research on information extraction technology of rivers and bridges in xinjiang mountainous area based on GF-1 image [D]. Urumqi: Xinjiang University, 2015.
[本文引用: 1]
[16]
STEELE M K, HEFFERNAN J B Morphological characteristics of urban water bodies: mechanisms of change and implications for ecosystem function
[J]. Ecological Applications , 2014 , 24 (5 ): 1070 - 1084
[本文引用: 1]
[17]
杨博雄, 陈颖, 于杰. 卫星遥感影像分水岭分割与边缘检测的海岸线提取 [J]. 电子技术与软件工程, 2020(11): 170-171.
[本文引用: 1]
YANG Bo-xiong, CHEN Ying, YU Jie. Coastline extraction based on watershed segmentation and edge detection of satellite remote sensing images [J], Electronics and Software Engineering, 2020(11): 170-171.
[本文引用: 1]
[18]
丁月平, 史玉峰 高空间分辨率遥感影像分类最优分割尺度
[J]. 辽宁工程技术大学学报:自然科学版 , 2014 , 33 (1 ): 56 - 61
[本文引用: 1]
DING Yue-ping, SHI Yu-feng Optimal segmentation scale for high spatial resolution remote sensing image classification
[J]. Journal of Liaoning Technical University: Natural Science , 2014 , 33 (1 ): 56 - 61
[本文引用: 1]
[19]
谭衢霖, 刘正军, 沈伟 一种面向对象的遥感影像多尺度分割方法
[J]. 北京交通大学学报 , 2007 , (4 ): 111 - 114
[本文引用: 1]
TAN Qu-lin, LIU Zheng-jun, SHEN Wei An object-oriented multi-scale segmentation method for remote sensing image
[J]. Journal of Beijing Jiaotong University , 2007 , (4 ): 111 - 114
[本文引用: 1]
[20]
王昶, 张永生, 韩世静. 基于频域显著性方法和ELM的遥感影像变化检测 [J]. 华中科技大学学报: 自然科学版, 2020, 48(5): 19-24.
[本文引用: 1]
WANG Chang, ZHANG Yong-sheng, HAN Shi-jing. Remote sensing image change detection based on frequency domain saliency method and ELM [J]. Journal of Huazhong University of Science and Technology: Natural Science Edition , 2020, 48(5): 19-24.
[本文引用: 1]
[21]
林荣清, 王延正, 刘晓恒. 基于 eCognition 的水体提取研究 [J]. 科技与创新, 2020(19): 17-20.
[本文引用: 1]
LIN Rong-qing, WANG Yan-zheng, LIU Xiao-heng. Research on water extraction based on eCognition [J]. Technology and Innovation, 2020(19): 17-20.
[本文引用: 1]
[22]
詹福雷. 基于面向对象的高分辨率遥感影像信息提取[D]. 长春: 吉林大学, 2014.
[本文引用: 1]
ZHAN Fu-lei. High resolution remote sensing image information extraction based on object-oriented [D]. Changchun: Jilin University, 2014.
[本文引用: 1]
[23]
邹橙. 基于GF-2遥感影像的水体信息提取方法研究 [D]. 合肥: 合肥工业大学, 2019.
[本文引用: 1]
ZOU Cheng. Research on water body information extraction method based on GF-2 remote sensing image [D]. Hefei: Hefei University of Technology, 2019.
[本文引用: 1]
[24]
WANG Z, BOVIK A C, SHEIKH H R Image quality assessment: from error visibility to structural similarity
[J]. IEEE Transactions on Image Processing , 2004 , 13 (4 ): 600 - 612
DOI:10.1109/TIP.2003.819861
[本文引用: 1]
[25]
FILZASAVITRA P, WALUYO P T, ERFA S R. Analysis of steganography on PNG image using least significant bit (LSB), peak signal to noise ratio (PSNR) and mean square error (MSE)
[J]. Journal of Engineering and Applied Sciences , 2019 , 14 (21 ): 7821 - 7827
DOI:10.36478/jeasci.2019.7821.7827
[本文引用: 1]
Spectral matching based on discrete particle swarm optimization: a new method for terrestrial water body extraction using multi-temporal Landsat 8 images
1
2018
... 地表水[1 ] (河流、湖泊、水库等)对维持城市生态系统[2 ] 的稳定起着至关重要的作用. 随着无人机遥感技术的快速发展,如何快速、准确地从无人机遥感影像中获取地表水体信息逐渐成为水利部门及大多数学者关注的热点. ...
Management regimes affect woody plant productivity and water use efficiency in an urban desert ecosystem
1
2008
... 地表水[1 ] (河流、湖泊、水库等)对维持城市生态系统[2 ] 的稳定起着至关重要的作用. 随着无人机遥感技术的快速发展,如何快速、准确地从无人机遥感影像中获取地表水体信息逐渐成为水利部门及大多数学者关注的热点. ...
Automated extraction of urban water bodies from ZY-3 multi-spectral imagery
1
2017
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
利用改进的归一化差异水体指数( MNDWI) 提取水体信息的研究
1
2005
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
利用改进的归一化差异水体指数( MNDWI) 提取水体信息的研究
1
2005
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
1
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
Assessment of surface water dynamics in Bangalore using WRI, NDWI, MNDWI, supervised classification and K-T transformation
1
2015
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
1
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
水库水体的最大类间方差迭代遥感提取方法
1
2021
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
水库水体的最大类间方差迭代遥感提取方法
1
2021
... 目前,国内外常采用水体指数模型算法对含近红外波段及短波红外波段的卫星遥感影像进行水体提取,如归一化水体差异指数法NDWI[3 ] 、改进归一化水体差异指数法[4 ] 及自动水提取指数法[5 ] 等方法. 采用基于影像像素灰度值的水体提取方法,如监督与非监督分类法[6 -7 ] 、阈值分割法[8 ] 等方法. 上述方法都是针对中低分辨率或多波段卫星遥感影像提出来的,将其应用于高分辨率、仅含有R 、G 、B 3个波段的无人机遥感影像水体提取工作中会出现较严重的光谱混淆现象,导致水体提取精度不高. ...
遥感图像水体识别方法的比较与改进
1
2012
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
遥感图像水体识别方法的比较与改进
1
2012
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
Extraction of urban water bodies from high-resolution remote-sensing imagery using deep learning
1
2018
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
基于改进U-Net网络的高分遥感影像水体提取
1
2020
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
基于改进U-Net网络的高分遥感影像水体提取
1
2020
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
面向对象的无人机影像水体变化监测方法
7
2018
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
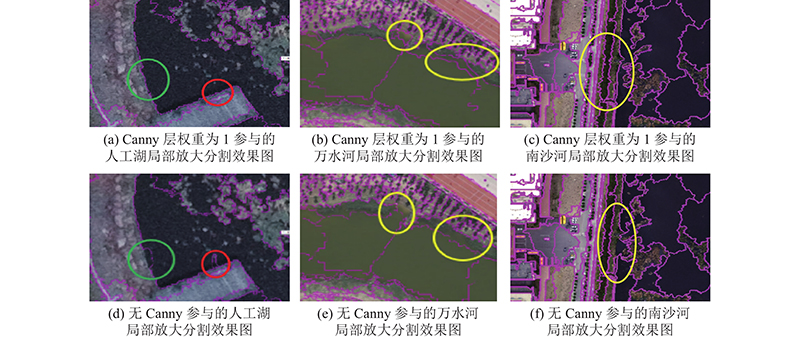
... 为了验证AUCSN方法的可行性,将该方法与传统的非监督提取方法(K-Mean)、无Canny算子参与的AUCSN方法文献[12 ]方法进行对比实验. K-Mean方法采用的是经典的、未经过优化的方法(最大迭代次数为60、距离阈值设置为5). 无Canny参与的AUCSN算法中,除了与Canny相关的参数不同外,其余各运行参数均与有Canny参与的AUCSN算法相同. 选择文献[12 ]方法的原因如下:1)该方法是针对无人机R 、G 、B 影像提出的水体提取方法;2)该方法是将影像的熵、角二阶矩、均值等纹理特征进行波段重组,突出水体信息;3)该方法是基于面向对象的方法. 上述3种方法的提取效果如图11 所示. ...
... ]方法进行对比实验. K-Mean方法采用的是经典的、未经过优化的方法(最大迭代次数为60、距离阈值设置为5). 无Canny参与的AUCSN算法中,除了与Canny相关的参数不同外,其余各运行参数均与有Canny参与的AUCSN算法相同. 选择文献[12 ]方法的原因如下:1)该方法是针对无人机R 、G 、B 影像提出的水体提取方法;2)该方法是将影像的熵、角二阶矩、均值等纹理特征进行波段重组,突出水体信息;3)该方法是基于面向对象的方法. 上述3种方法的提取效果如图11 所示. ...
... Statistical table of water extraction accuracy and operating efficiency
Tab.5 实验区域 实验方法 P/ % Q/ % R/ % t /s 人工湖 AUCSN方法 96.34 3.66 2.31 87.32 人工湖 无Canny-AUCSN方法 90.46 9.54 11.98 120.67 人工湖 K-Mean方法 85.46 14.54 18.32 53.13 人工湖 文献[12 ]方法 90.12 9.88 6.43 150.76 万水河 AUCSN方法 97.62 2.38 1.02 39.43 万水河 无Canny-AUCSN方法 89.03 10.97 9.65 59.31 万水河 K-Mean方法 86.62 13.38 26.85 30.11 万水河 文献[12 ]方法 88.86 11.14 7.85 80.19 南沙河 AUCSN方法 97.47 2.53 1.84 49.65 南沙河 无Canny-AUCSN方法 86.91 4.87 5.89 68.83 南沙河 K-Mean方法 85.73 14.27 9.01 38.74 南沙河 文献[12 ]方法 87.66 12.34 8.98 95.66
从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
... 文献[
12 ]方法
88.86 11.14 7.85 80.19 南沙河 AUCSN方法 97.47 2.53 1.84 49.65 南沙河 无Canny-AUCSN方法 86.91 4.87 5.89 68.83 南沙河 K-Mean方法 85.73 14.27 9.01 38.74 南沙河 文献[12 ]方法 87.66 12.34 8.98 95.66 从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
... 文献[
12 ]方法
87.66 12.34 8.98 95.66 从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
... 从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
面向对象的无人机影像水体变化监测方法
7
2018
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
... 为了验证AUCSN方法的可行性,将该方法与传统的非监督提取方法(K-Mean)、无Canny算子参与的AUCSN方法文献[12 ]方法进行对比实验. K-Mean方法采用的是经典的、未经过优化的方法(最大迭代次数为60、距离阈值设置为5). 无Canny参与的AUCSN算法中,除了与Canny相关的参数不同外,其余各运行参数均与有Canny参与的AUCSN算法相同. 选择文献[12 ]方法的原因如下:1)该方法是针对无人机R 、G 、B 影像提出的水体提取方法;2)该方法是将影像的熵、角二阶矩、均值等纹理特征进行波段重组,突出水体信息;3)该方法是基于面向对象的方法. 上述3种方法的提取效果如图11 所示. ...
... ]方法进行对比实验. K-Mean方法采用的是经典的、未经过优化的方法(最大迭代次数为60、距离阈值设置为5). 无Canny参与的AUCSN算法中,除了与Canny相关的参数不同外,其余各运行参数均与有Canny参与的AUCSN算法相同. 选择文献[12 ]方法的原因如下:1)该方法是针对无人机R 、G 、B 影像提出的水体提取方法;2)该方法是将影像的熵、角二阶矩、均值等纹理特征进行波段重组,突出水体信息;3)该方法是基于面向对象的方法. 上述3种方法的提取效果如图11 所示. ...
... Statistical table of water extraction accuracy and operating efficiency
Tab.5 实验区域 实验方法 P/ % Q/ % R/ % t /s 人工湖 AUCSN方法 96.34 3.66 2.31 87.32 人工湖 无Canny-AUCSN方法 90.46 9.54 11.98 120.67 人工湖 K-Mean方法 85.46 14.54 18.32 53.13 人工湖 文献[12 ]方法 90.12 9.88 6.43 150.76 万水河 AUCSN方法 97.62 2.38 1.02 39.43 万水河 无Canny-AUCSN方法 89.03 10.97 9.65 59.31 万水河 K-Mean方法 86.62 13.38 26.85 30.11 万水河 文献[12 ]方法 88.86 11.14 7.85 80.19 南沙河 AUCSN方法 97.47 2.53 1.84 49.65 南沙河 无Canny-AUCSN方法 86.91 4.87 5.89 68.83 南沙河 K-Mean方法 85.73 14.27 9.01 38.74 南沙河 文献[12 ]方法 87.66 12.34 8.98 95.66
从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
... 文献[
12 ]方法
88.86 11.14 7.85 80.19 南沙河 AUCSN方法 97.47 2.53 1.84 49.65 南沙河 无Canny-AUCSN方法 86.91 4.87 5.89 68.83 南沙河 K-Mean方法 85.73 14.27 9.01 38.74 南沙河 文献[12 ]方法 87.66 12.34 8.98 95.66 从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
... 文献[
12 ]方法
87.66 12.34 8.98 95.66 从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
... 从表5 可以看出,传统的K-Mean方法分割效率高,但错提率与漏提率非常高. 文献[12 ]方法对噪声较敏感,且缺少形态学修饰的过程,造成提取出的水体存在孔洞现象. 无Canny-AUCSN方法由于对水体边缘的分割不准确,导致水体提取精度不高. 本文提出的AUCSN方法对无人机遥感影像中水体提取的平均准确度可以达到96%,遗漏误差和冗余误差分别为2.5%和1.5%,精度明显高于另外3种对比方法,分割效率较高. ...
基于特征于规则的河流水系信息提取研究
2
2018
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
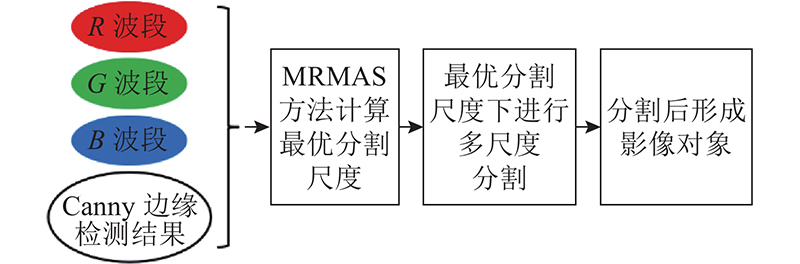
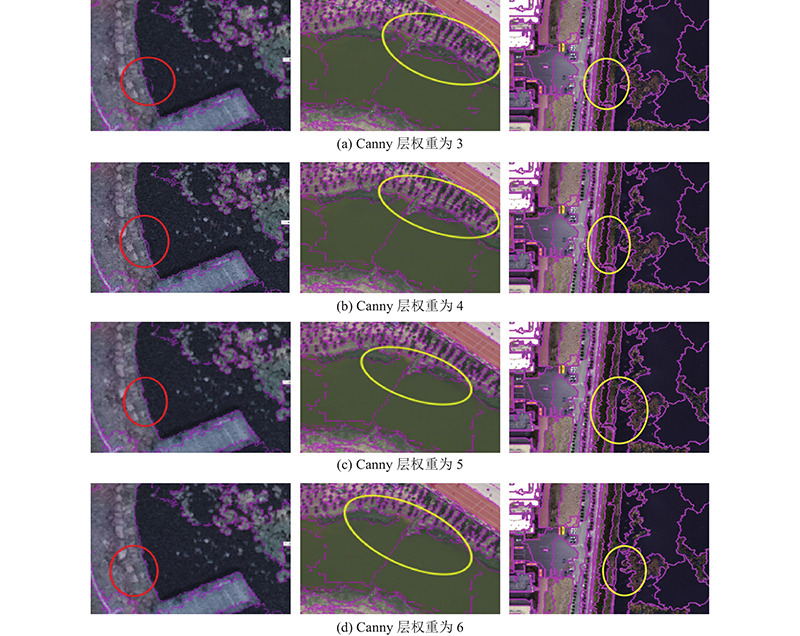
... 通过总结谭衢霖等[19 ] 对最优分割方法的研究及针对周晓明[13 ] 提出的无人机影像水体提取方法无法快速且准确地获取最优分割尺度的问题,在多尺度分割(multiscale segmentation,M-SS)方法中引入MRMAS来自动获取最优分割尺度. MRMAS方法依据“各对象内同质性最大,对象之间差异性最大”的原则,计算公式为 ...
基于特征于规则的河流水系信息提取研究
2
2018
... 随着研究者们的不断努力,一些适用于无人机遥感影像的水体提取新方法,如面向对象方法[9 ] 、深度学习方法等相继被提出. 其中,深度学习方法,如Chen等[10 ] 提出的CNN网络模型法、何红术等[11 ] 提出的改进的U-Net网络法等方法能够将水体比较完整地进行提取,对小目标水体的提取效果较好,但深度学习方法需要大量的样本数据进行训练,对服务器的配置要求较高且耗时较长. 面向对象方法,如秦慧杰等[12 ] 基于该方法实现了无人机影像中的水体提取与变化监测,但该方法对影像的质量要求特别高,对噪声特别敏感. 周晓明[13 ] 基于该方法实现了无人机影像的水体提取,但须对影像进行多尺度分割,分别取150、200、250等不同的分割尺度进行尝试,耗时耗力,降低了精度. ...
... 通过总结谭衢霖等[19 ] 对最优分割方法的研究及针对周晓明[13 ] 提出的无人机影像水体提取方法无法快速且准确地获取最优分割尺度的问题,在多尺度分割(multiscale segmentation,M-SS)方法中引入MRMAS来自动获取最优分割尺度. MRMAS方法依据“各对象内同质性最大,对象之间差异性最大”的原则,计算公式为 ...
Scale-space and edge detection using anisotropic diffusion
1
1990
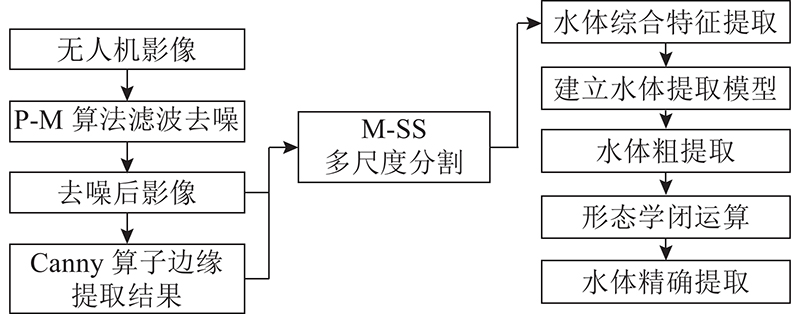
... 针对上述问题,本文提出结合边缘检测算法和面向对象方法的新水体提取方法—AUCSN方法. 该方法为了消除噪声干扰,采用各向异性扩散算法[14 ] (P-M算法)进行滤波去噪. 为了提高多尺度分割的效率与准确性,将Canny检测结果与去噪后的影像进行波段重组,将重组后的影像在最优分割尺度下进行多尺度分割(引入改进的邻域绝对均值差分方差比值 (modified ratio of mean difference to neighbors to standard deviation, MRMAS)来自动获取重组影像的最优分割尺度[15 ] ),提高了分割速度,与地物边缘的吻合度更高[16 ] . 为了获取最终的水体信息,采用水体综合特征提取模型去除阴影,实现水体粗提取,将粗提取结果进行形态学闭运算修饰,实现水体精提取. AUCSN方法与深度学习方法相比,对电脑配置的要求不高,更适用于只有R 、G 、B 3波段的无人机遥感影像水体信息的快速获取,为水利部门快速提取水体信息提供了方法参考. ...
1
... 针对上述问题,本文提出结合边缘检测算法和面向对象方法的新水体提取方法—AUCSN方法. 该方法为了消除噪声干扰,采用各向异性扩散算法[14 ] (P-M算法)进行滤波去噪. 为了提高多尺度分割的效率与准确性,将Canny检测结果与去噪后的影像进行波段重组,将重组后的影像在最优分割尺度下进行多尺度分割(引入改进的邻域绝对均值差分方差比值 (modified ratio of mean difference to neighbors to standard deviation, MRMAS)来自动获取重组影像的最优分割尺度[15 ] ),提高了分割速度,与地物边缘的吻合度更高[16 ] . 为了获取最终的水体信息,采用水体综合特征提取模型去除阴影,实现水体粗提取,将粗提取结果进行形态学闭运算修饰,实现水体精提取. AUCSN方法与深度学习方法相比,对电脑配置的要求不高,更适用于只有R 、G 、B 3波段的无人机遥感影像水体信息的快速获取,为水利部门快速提取水体信息提供了方法参考. ...
1
... 针对上述问题,本文提出结合边缘检测算法和面向对象方法的新水体提取方法—AUCSN方法. 该方法为了消除噪声干扰,采用各向异性扩散算法[14 ] (P-M算法)进行滤波去噪. 为了提高多尺度分割的效率与准确性,将Canny检测结果与去噪后的影像进行波段重组,将重组后的影像在最优分割尺度下进行多尺度分割(引入改进的邻域绝对均值差分方差比值 (modified ratio of mean difference to neighbors to standard deviation, MRMAS)来自动获取重组影像的最优分割尺度[15 ] ),提高了分割速度,与地物边缘的吻合度更高[16 ] . 为了获取最终的水体信息,采用水体综合特征提取模型去除阴影,实现水体粗提取,将粗提取结果进行形态学闭运算修饰,实现水体精提取. AUCSN方法与深度学习方法相比,对电脑配置的要求不高,更适用于只有R 、G 、B 3波段的无人机遥感影像水体信息的快速获取,为水利部门快速提取水体信息提供了方法参考. ...
Morphological characteristics of urban water bodies: mechanisms of change and implications for ecosystem function
1
2014
... 针对上述问题,本文提出结合边缘检测算法和面向对象方法的新水体提取方法—AUCSN方法. 该方法为了消除噪声干扰,采用各向异性扩散算法[14 ] (P-M算法)进行滤波去噪. 为了提高多尺度分割的效率与准确性,将Canny检测结果与去噪后的影像进行波段重组,将重组后的影像在最优分割尺度下进行多尺度分割(引入改进的邻域绝对均值差分方差比值 (modified ratio of mean difference to neighbors to standard deviation, MRMAS)来自动获取重组影像的最优分割尺度[15 ] ),提高了分割速度,与地物边缘的吻合度更高[16 ] . 为了获取最终的水体信息,采用水体综合特征提取模型去除阴影,实现水体粗提取,将粗提取结果进行形态学闭运算修饰,实现水体精提取. AUCSN方法与深度学习方法相比,对电脑配置的要求不高,更适用于只有R 、G 、B 3波段的无人机遥感影像水体信息的快速获取,为水利部门快速提取水体信息提供了方法参考. ...
1
... P-M算法[17 ] 把影像视为热量场,每个像素视为热流,依据当前像素与邻域像素间的关系,判断是否需要向周围扩散. 若某个邻域的像素与当前像素间的差别较大,则可以断定该邻域像素为边界的可能性较大,当前像素不须再向该方向扩散,使边界得以保存. 迭代原理的公式如下: ...
1
... P-M算法[17 ] 把影像视为热量场,每个像素视为热流,依据当前像素与邻域像素间的关系,判断是否需要向周围扩散. 若某个邻域的像素与当前像素间的差别较大,则可以断定该邻域像素为边界的可能性较大,当前像素不须再向该方向扩散,使边界得以保存. 迭代原理的公式如下: ...
高空间分辨率遥感影像分类最优分割尺度
1
2014
... 在图像处理中,边缘主要分布在目标与背景的灰度差异较明显的地方[18 ] ,即某点一阶导数局部极大值处,可以依据导数实现边界点集的提取. ...
高空间分辨率遥感影像分类最优分割尺度
1
2014
... 在图像处理中,边缘主要分布在目标与背景的灰度差异较明显的地方[18 ] ,即某点一阶导数局部极大值处,可以依据导数实现边界点集的提取. ...
一种面向对象的遥感影像多尺度分割方法
1
2007
... 通过总结谭衢霖等[19 ] 对最优分割方法的研究及针对周晓明[13 ] 提出的无人机影像水体提取方法无法快速且准确地获取最优分割尺度的问题,在多尺度分割(multiscale segmentation,M-SS)方法中引入MRMAS来自动获取最优分割尺度. MRMAS方法依据“各对象内同质性最大,对象之间差异性最大”的原则,计算公式为 ...
一种面向对象的遥感影像多尺度分割方法
1
2007
... 通过总结谭衢霖等[19 ] 对最优分割方法的研究及针对周晓明[13 ] 提出的无人机影像水体提取方法无法快速且准确地获取最优分割尺度的问题,在多尺度分割(multiscale segmentation,M-SS)方法中引入MRMAS来自动获取最优分割尺度. MRMAS方法依据“各对象内同质性最大,对象之间差异性最大”的原则,计算公式为 ...
1
... 光谱特征主要表达影像原始的灰度特征,包括光谱均值、光谱最小值、光谱最大值及光谱标准差值等. 为了更好地利用各波段光谱特征,选择影像各波段光谱均值作为影像的光谱特征[20 ] ,计算公式为 ...
1
... 光谱特征主要表达影像原始的灰度特征,包括光谱均值、光谱最小值、光谱最大值及光谱标准差值等. 为了更好地利用各波段光谱特征,选择影像各波段光谱均值作为影像的光谱特征[20 ] ,计算公式为 ...
1
... 形态特征是指对象在分割后的形态上展现出来的特征[21 ] ,包括长度、宽度、面积、长宽比等. 可以发现水体在遥感影像中的表现特征一般为面积较大且长宽比较大,所以选择影像对象的面积与长宽比进行水体信息提取. ...
1
... 形态特征是指对象在分割后的形态上展现出来的特征[21 ] ,包括长度、宽度、面积、长宽比等. 可以发现水体在遥感影像中的表现特征一般为面积较大且长宽比较大,所以选择影像对象的面积与长宽比进行水体信息提取. ...
1
... 纹理特征用于描述影像中被提取对象或子对象的纹理信息[22 ] . 纹理特征是较高分辨率的遥感影像中很重要的特征,用于描述图像区域所对应景物的表面性质,包括图像的同质性、角二阶矩、熵、非相似性、纹理均值及标准差等特征. 选择纹理均值进行水体提取,纹理均值表示为 ...
1
... 纹理特征用于描述影像中被提取对象或子对象的纹理信息[22 ] . 纹理特征是较高分辨率的遥感影像中很重要的特征,用于描述图像区域所对应景物的表面性质,包括图像的同质性、角二阶矩、熵、非相似性、纹理均值及标准差等特征. 选择纹理均值进行水体提取,纹理均值表示为 ...
1
... 为了使提取的水体信息更完整,利用形态学闭运算对内部孔洞进行填充. 形态学闭运算作为AUCSN方法的最后一个步骤,原理是采用结构元素对影像进行膨胀操作再进行腐蚀操作. 该运算不仅能够使目标图像内部孔洞被填充,保持目标原有的形状及大小不变,而且能够把断裂的目标连接起来[23 ] . ...
1
... 为了使提取的水体信息更完整,利用形态学闭运算对内部孔洞进行填充. 形态学闭运算作为AUCSN方法的最后一个步骤,原理是采用结构元素对影像进行膨胀操作再进行腐蚀操作. 该运算不仅能够使目标图像内部孔洞被填充,保持目标原有的形状及大小不变,而且能够把断裂的目标连接起来[23 ] . ...
Image quality assessment: from error visibility to structural similarity
1
2004
... 如图5 所示为上述3种滤波方法能够达到的最佳去噪效果. 对比去噪结果可以发现,常用的中值滤波器虽然能够有效地去除噪声,但使得图像边缘产生了模糊,不利于后续的边缘检测及影像分割. 均值滤波器对噪声的去除效果不好,使得影像中各地物信息更模糊,不利于后续的边缘检测及影像分割. 采用的P-M滤波算法既能够很好地保留边缘,又能够去噪. 采用结构相似度(structural similarity, SSIM)[24 ] 、峰值信噪比(peak signal to noise ratio,PSNR)[25 ] 2个定量评价指标,对3种方法的去噪效果进行对比. SSIM是衡量2幅图像相似度的指标,公式为 ...
Analysis of steganography on PNG image using least significant bit (LSB), peak signal to noise ratio (PSNR) and mean square error (MSE)
1
2019
... 如图5 所示为上述3种滤波方法能够达到的最佳去噪效果. 对比去噪结果可以发现,常用的中值滤波器虽然能够有效地去除噪声,但使得图像边缘产生了模糊,不利于后续的边缘检测及影像分割. 均值滤波器对噪声的去除效果不好,使得影像中各地物信息更模糊,不利于后续的边缘检测及影像分割. 采用的P-M滤波算法既能够很好地保留边缘,又能够去噪. 采用结构相似度(structural similarity, SSIM)[24 ] 、峰值信噪比(peak signal to noise ratio,PSNR)[25 ] 2个定量评价指标,对3种方法的去噪效果进行对比. SSIM是衡量2幅图像相似度的指标,公式为 ...








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}