

针对上述问题,不少学者提出相应的改进措施. Li等[14]利用随机参数和潜在类别加速风险模型,捕捉到了驾驶员之间未观察到的异质性. 张菁等[15]将交通压力和驾驶人心理引入跟驰和换道模型,再现交织区交通流的运行特性. 赵树恩等[16]运用贝叶斯网络拟合横向位移,分析车辆换道决策的相关特征参数. Li等[17]利用微观交通变量,对交通振荡传播过程中车道变换的多重影响进行短期预测. 现有针对汇合交互作用的研究大多是以“汇合车辆”为研究对象,汇合过程是多辆车参与的复杂交互过程,忽略汇合过程中的其他车辆,可能导致辅助驾驶系统以及自动驾驶系统的安全性能降低. 采用梯度提升决策树对高速公路交织区目标车道领跟车特征变量进行建模,分析领跟车与汇合车辆之间的复杂交互行为,深度挖掘领跟车影响变量与加速度之间隐藏的非线性关系.
1. 梯度提升决策树的建立
梯度提升决策树(gradient boosting decision tree,GBDT)是基于梯度提升迭代的思想,通过最小化正规化学习目标,即损失函数最小化,让损失函数总是沿着负梯度方向下降,从而建立弱决策树,利用不断迭代降低残差,累积所有树的结果获取最终的预测结果. 将目标车道领跟车的加速度用
式中:
式中:
学习目标为
式中:
建立GBDT模型后,基于赤池信息准则AIC和贝叶斯信息准则BIC对不同研究对象的模型进行比较和分析[14],AIC与BIC越小,表示模型的性能越好. AIC和BIC的计算公式为
式中:
2. 影响参数提取与分析
与以往研究不同,将目标车道的领跟车作为研究对象,分析领跟车与汇合车辆之间的复杂交互作用. 如图1所示,正常行驶在汇合车辆即将驶入的车道并位于汇合车辆前方的车辆称为目标车道领车PL,正常行驶在汇合车辆即将驶入的车道并位于汇合车辆后方的车辆称为目标车道跟车PF,目标车道领跟车是目标车道领车与目标车道跟车的统称.
图 1

采用美国联邦公路局NGSIM数据集中的车辆轨迹数据进行研究,NGSIM数据集中提供的轨迹数据包含车辆的移动坐标、速度、加速度、车型等,时间精度为0.1 s/帧. 研究汇合车辆汇合行为对目标车道领跟车的影响程度,即目标车道领跟车在影响汇合车辆的同时,自身会受到汇合车辆的影响. 目标车道领跟车的基本特征如表1所示. 表中,Q为车辆数,L为车辆均长,W为车辆均宽,V为平均速度,A为平均加速度,H为车头间距,T为车头时距.
表 1 目标车道领跟车的基本特征
Tab.1
| 车辆类型 | Q | L/m | W/m | V/(m·s−1) | A/(m·s−2) | H/m | T/s |
| 目标领车PL | 206 | 4.23 | 1.94 | 11.37 | −0.06 | 14.31 | 0.66 |
| 目标跟车PF | 184 | 4.69 | 2.02 | 10.80 | 0.03 | 25.85 | 1.04 |
根据以往的研究,大多将汇合车辆作为研究对象,分析汇合车辆和周围车辆的速度差与空间间隙对交通流汇合行为的影响. 与空间间隙Y相比,T更能够体现车辆之间的交互作用,因此选取NGSIM数据集中车辆编号为33的汇合车辆为例,如图2所示. 图中,t为汇合时间.
图 2
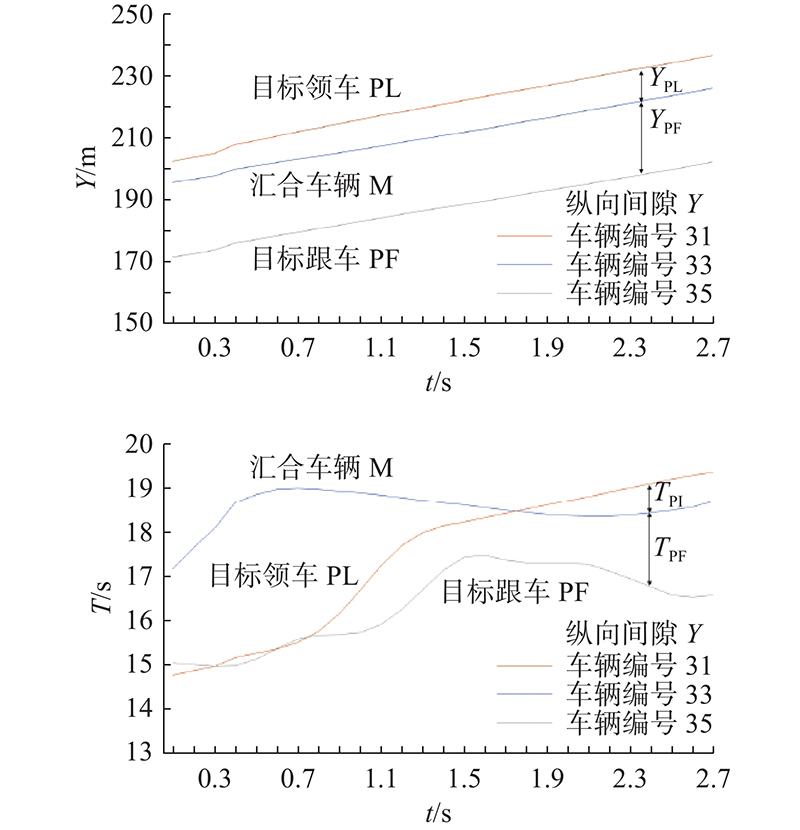
图 3
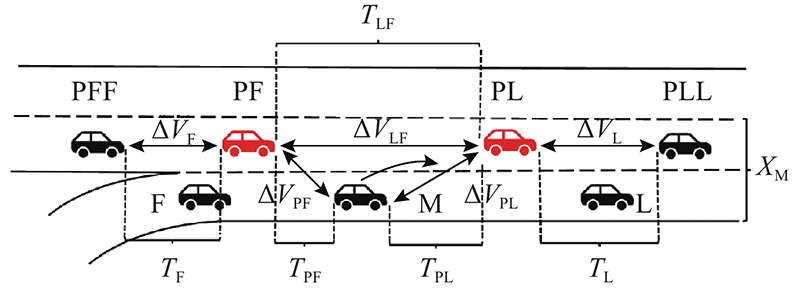
为了研究汇合过程中汇合车辆对目标车道领跟车的影响程度,选取目标车道领跟车与周围车辆的速度差△VL、△VLF、△VF、△VPL、△VPF和时间间隙TL、TLF、TF、TPL、TPF以及汇合车辆的横向位置XM作为影响汇合加速度的因素(见图3). 为了研究交通冲突对汇合行为交互作用的影响,引入交通冲突指标TTC (time-to-collision),计算方法为
式中:TTC为汇合车辆与主线车道前车右车身线的碰撞时间,
TTC作为冲突评价指标,局限性主要在于当前车速度大于后车时,数据会呈现负值;当前车速度非常接近或等于后车时,数值变得极大甚至为无限大. 在这2种情况下,车辆之间理论上不可能发生碰撞,因此将TTC控制为(0,100] s,即当TTC为负值或大于100时,均取为100 s.
在汇合过程中各车辆的加速度与选取各变量之间的相关系数及P值如表2所示. 可以看出,大多数变量与各车辆的加速度呈现显著的相关性,部分变量与加速度的相关性不显著. 其中,TL和TF与汇合车辆加速度的相关性不显著,主要是由于这2个变量反映的是汇合车辆与自身车道前、后车之间的交互影响,汇合车辆汇入目标车道本身对自身车道的车辆影响极小. TL和TLF与目标领车加速度的相关性不显著,这说明目标车道领车在跟车过程中的影响因素与一般的跟驰行为发生了较显著的变化. 从表2的相关系数可以看出,大部分自变量和应变量之间的相关系数绝对值小于0.3,说明大部分自变量和应变量之间的线性关系较弱,采用参数模型可能难以描述变量之间的复杂关系.
表 2 交互作用影响变量之间的相关性系数
Tab.2
| 影响变量 | 汇合车辆M | 目标领车PL | 目标跟车PF | |||||
| Person相关系数 | P | Person相关系数 | P | Person相关系数 | P | |||
| VM/(m·s−1) | −0.148 | 0.000 | — | — | — | — | ||
| VPL/(m·s−1) | — | — | −0.040 | 0.000 | — | — | ||
| VPF/(m·s−1) | — | — | — | — | −0.062 | 0.000 | ||
| △VL/(m·s−1) | −0.146 | 0.000 | −0.191 | 0.000 | — | — | ||
| △VF/(m·s−1) | 0.070 | 0.000 | — | — | −0.030 | 0.000 | ||
| △VPL/(m·s−1) | −0.429 | 0.000 | −0.020 | 0.019 | — | — | ||
| △VPF/(m·s−1) | 0.280 | 0.000 | — | — | −0.140 | 0.000 | ||
| △VLF/(m·s−1) | — | — | −0.016 | 0.059 | −0.171 | 0.000 | ||
| TL/s | 0.001 | 0.912 | 0.011 | 0.208 | — | — | ||
| TF/s | −0.011 | 0.348 | — | — | 0.037 | 0.000 | ||
| TPL/s | 0.056 | 0.000 | −0.028 | 0.001 | — | — | ||
| TPF/s | 0.096 | 0.000 | — | — | 0.030 | 0.000 | ||
| TLF/s | — | — | 0.003 | 0.725 | 0.058 | 0.000 | ||
| TTCL/s | 0.071 | 0.000 | 0.213 | 0.000 | — | — | ||
| TTCF/s | −0.057 | 0.000 | — | — | 0.023 | 0.007 | ||
| TTCPL/s | 0.337 | 0.000 | −0.014 | 0.100 | — | — | ||
| TTCPF/s | −0.091 | 0.000 | — | — | 0.070 | 0.000 | ||
| TTCLF/s | — | — | 0.028 | 0.001 | 0.167 | 0.000 | ||
| XM/m | −0.047 | 0.000 | 0.033 | 0.000 | 0.041 | 0.000 | ||
3. 交织区汇合交互作用影响分析
梯度提升决策树(GBDT)模型由学习率
表 3 GBDT模型的参数设定
Tab.3
| 车辆类型 | | | | | |
| 汇合车辆M | 0.0380 | 7 | 0.6 | 10 | 5000 |
| 目标领车PL | 0.0388 | 7 | 0.6 | 10 | 5000 |
| 目标跟车PF | 0.0409 | 7 | 0.6 | 10 | 5000 |
考虑损失函数最小化,采用3种损失函数:最小绝对偏差损失函数(least absolute deviation, LAD)、平方损失函数(least squares, LS)及胡贝尔损失函数(Huber-M),对样本数据进行拟合. 利用评价指标:平均绝对偏差(mean absolute deviation, MAD)和均方误差(mean-square error, MSE),对不同损失函数之间模型的拟合效果进行对比.
如表4所示,不同损失函数对模型的拟合效果不同,MAD、MSE越小,说明拟合效果越好,其中平方损失函数损失函数对模型的拟合效果优于其他2种损失函数. 使用LS作为损失函数:
表 4 损失函数拟合效果的对比
Tab.4
| 损失函数 | 车辆类型 | MAD | MSE |
| LAD | 汇合车辆M | 0.417 | 0.383 |
| LAD | 目标领车PL | 0.613 | 1.128 |
| LAD | 目标跟车PF | 0.564 | 1.020 |
| LS | 汇合车辆M | 0.318 | 0.196 |
| LS | 目标领车PL | 0.558 | 0.718 |
| LS | 目标跟车PF | 0.549 | 0.748 |
| Huber-M | 汇合车辆M | 0.326 | 0.223 |
| Huber-M | 目标领车PL | 0.577 | 0.770 |
| Huber-M | 目标跟车PF | 0.566 | 0.778 |
与以往的研究相比,本文侧重研究目标车道领跟车对汇合车辆的影响程度,利用梯度提升决策树建立交织区汇合交互作用模型. 从表5可知,汇合车辆利用该模型进行预测的精度高于目标车道的领跟车,这是由于目标车道领跟车相对于汇合车辆的行为更加难以预测,加减速行为更加复杂. 在自动驾驶或辅助驾驶的情况下,汇合过程中领跟车的安全状态比汇合车辆更关键.
表 5 不同研究对象之间模型预测精度的对比
Tab.5
| 车辆类型 | AIC | BIC |
| 汇合车辆M | −22 539.9 | −22 434.4 |
| 目标领车PL | −4 574.9 | −4 492.0 |
| 目标跟车PF | −3 997.2 | −3 914.3 |
根据影响变量在迭代过程中分裂的次数以及分裂过程中精度的提高,可以得到变量
领跟车各影响变量的相对重要性百分比如图4所示. XM对目标车道领跟车的重要性程度最高,说明汇合交互行为对目标车道领跟车的加速度有极其重要的作用;其次重要的是目标车道领跟车与周围车辆的时间间隙,主要区别是△VPF的重要性高于时间间隙,这是由于汇合交互过程中目标车道领跟车主要受自身前车的影响,汇合车辆位于跟车前方,领车难以观察到汇合车辆的运行状态,跟车需要根据汇合车辆的交互行为不断调整运行速度. 这些结果表明,在汇合过程中,汇合车辆以外的车辆加速行为与传统的跟驰行为具有显著的区别,忽视这种区别可能会造成辅助驾驶或自动驾驶系统的安全性能降低,导致交通事故. 为了探究目标车道领跟车与汇合车辆的交互作用,利用部分影响变量对预测结果进行偏效应分析,如图5所示. 图中,Pa为变量的偏效应.
图 4
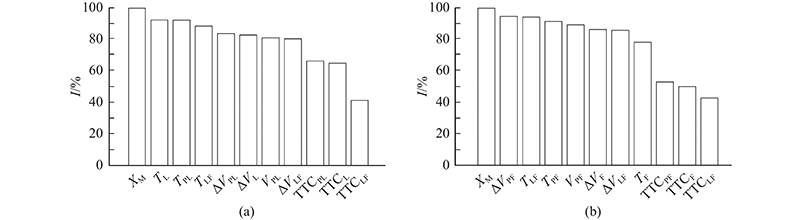
图 4 领跟车影响变量的相对重要性
Fig.4 Relative importance of leading and following variables
图 5
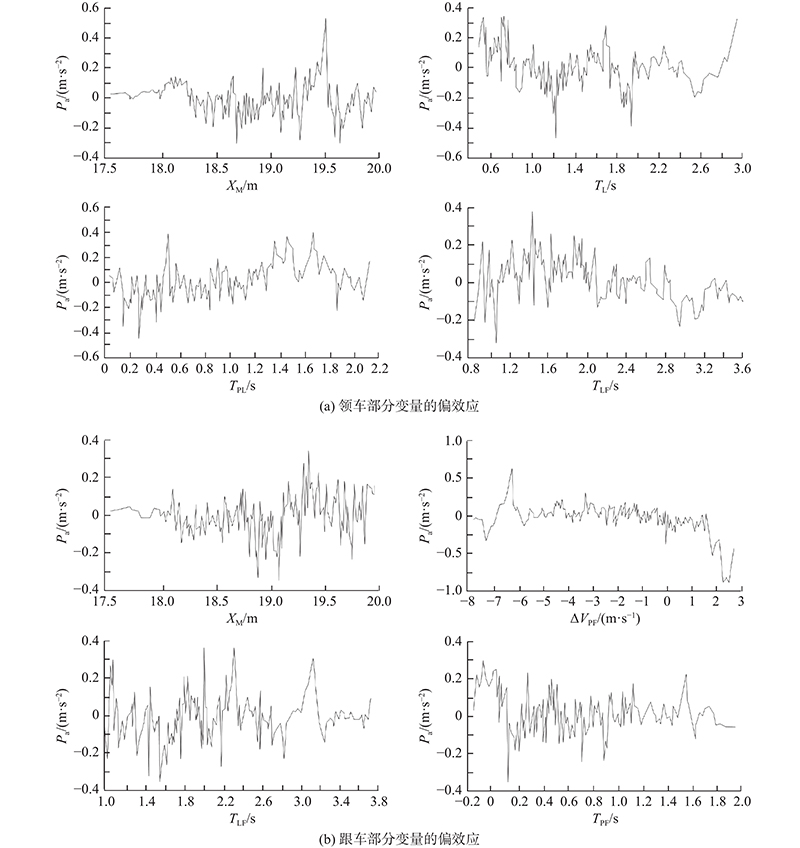
图 5 领跟车部分变量对预测结果的偏效应
Fig.5 Partial effect of some variables of leading and following on prediction results
分别选取领跟车影响因素重要性排名前四的变量进行偏效应分析,从图5可知,领跟车的影响变量与汇合交互过程中的加速度具有较强的非线性关系. 通过XM对目标车道领跟车的偏效应对比可以看出,汇合车辆在汇入目标车道的时候,领跟车的加速度会出现较大的上下浮动. 这是由于汇合交互是复杂的过程,为了避免汇合交互过程中与汇合车辆发生碰撞风险,领跟车必须根据汇合车辆的运动状态调整自身的加速度. 时间间隙在汇合交互作用中占有重要的位置. 可以发现,目标车道车辆主要受自身前车的影响,其次是与汇合车辆的影响. 在一般情况下,目标车道跟车比目标车道领车与自身前车的时间间隙高,在TL为[2.0, 2.4] s或TLF为[3.3, 3.7] s的条件下Pa变化较小. 这是由于领车的前方车辆会保持稳定的运动状态行驶于目标车道,跟车需要考虑汇合车辆,汇合车辆随时都会采取汇合措施汇入目标车道,变成跟车的前车,因此需要为汇合车辆提供足够的可接受汇入间隙. 在目标车道领跟车与汇合车辆之间的影响中,难以捕捉到领跟车与汇合车辆之间的稳定间隙,只能观察到跟车加速度的变化浮动明显高于领车,说明目标车道跟车会根据汇合车辆的运行状态及时采取汇合措施,保持速度差为1.5 m/s. 领车由于受到视觉的限制,只能通过后视镜观察汇合车辆,与目标车道跟车相比,汇合车辆对领车的影响较小.
4. 结 语
本文提取美国NGSIM数据集汇合过程的车辆轨迹数据,基于梯度提升决策树(GBDT)构建交织区汇合交互作用模型. 以目标车道的领跟车为研究对象进行建模和分析. 研究结果表明,平方损失函数可以有效地提高汇合交互模型的预测精度,GBDT用于汇合车辆的拟合效果显著高于领跟车. 在各影响变量中,汇合车辆的横向位置对车辆加速度的影响程度最高,领跟车的影响变量与加速度之间会呈现较强的非线性关系. GBDT模型不仅可以准确地预测目标车道领跟车与汇合车辆之间的交互作用,还可以深度挖掘汇合过程中目标车道领跟车与汇合车辆之间的隐藏关系.
在后续的研究中,采集国内高速公路的车辆轨迹数据,对模型进行比较和验证. 挖掘并分析不同汇合行为影响变量之间变化的原因,揭示汇合行为对交通流运行和交通安全的影响,提高了模型的精度,为辅助驾驶技术和无人驾驶技术提供理论支撑.
参考文献
基于无人机视频拍摄的高速公路小型车换道行为特性
[J].DOI:10.3969/j.issn.1001-7372.2020.06.009 [本文引用: 1]
Lane-changing behavior characteristics of small highway vehicles based on UAV video shooting
[J].DOI:10.3969/j.issn.1001-7372.2020.06.009 [本文引用: 1]
Modeling vehicle interactions during lane-changing behavior on arterial streets
[J].DOI:10.1111/j.1467-8667.2010.00679.x [本文引用: 1]
A model for the structure of lane-changing decisions
[J].
基于自然驾驶数据的高速公路出口换道决策模型
[J].
A highway exit lane changing decision model based on natural driving data
[J].
城市干线短交织区元胞自动机多级换道决策模型
[J].
Cellular automata multi-level lane changing decision model for urban trunk line short interweaving area
[J].
A binary decision model for discretionary lane changing move based on fuzzy inference system
[J].
Modeling the various merging behaviors at expressway on-ramp bottlenecks using support vector machine models
[J].
换道过程中越线时刻预测模型
[J].
Prediction model of crossing time during lane change
[J].
采用梯度提升决策树的车辆换道融合决策模型
[J].
Vehicle lane changing fusion decision model using gradient boosting decision tree
[J].
引入驾驶风格的熵权法多属性换道决策模型
[J].
Multi-attribute lane changing decision model with entropy weight method introducing driving style
[J].
Modeling vehicle interactions during freeway ramp merging in congested weaving section
[J].
基于分子动力学的车辆换道交互行为特性及其模型
[J].
Interactive behavior characteristics and model of vehicle lane changing based on molecular dynamics
[J].
高速场景相邻前车驾驶行为识别及意图预测
[J].
Driving behavior recognition and intention prediction of adjacent vehicles in high-speed scene
[J].
Characterizing heterogeneity among merging positions: comparison study between random parameter and latent class accelerated hazard model
[J].
快速路交织区交通流模型研究
[J].
Research on traffic flow model of expressway interweaving area
[J].
基于贝叶斯网络的车辆换道决策模型研究
[J].
Research on the decision model of vehicle lane changing based on Bayesian network
[J].
Short-term prediction of safety and operation impacts of lane changes in oscillations with empirical vehicle trajectories
[J].
Modeling merging acceleration and deceleration behavior based on gradient-boosting decision tree
[J].DOI:10.1061/JTEPBS.0000386 [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}