

深基坑地连墙支护体系是目前地下空间开发的重要支护型式,开展地连墙支护体系变形规律研究对基坑工程设计施工具有重要指导意义. 深基坑地连墙支护体系受力和变形特性复杂[1-2],具有明显的时空效应[3-4]. 基坑地连墙位移随开挖深度的增加而增大[5],其受力变形特性也受基坑尺寸及周围土体性质的影响[6-7]. 基坑降水将引发较大的地连墙位移和周围地表沉降,且具有时间效应与尺寸效应特征[8-9]. 基坑开挖会诱发相邻建筑物或邻近隧道产生形变[10-12],基坑几何参数、土体及地连墙特性均为重要影响因素[13]. 上述研究对支护结构设计具有指导意义,但在实际工程中基坑受多种因素的影响,实际受力变形特征与设计情况常存在较大差异,当监测结果与设计值存在偏差时,如何进行动态调整是一个难题.
为了解决支撑轴力补偿不足引发的实测值偏移设计值的问题,工程师们建立了一套以严格控制地连墙水平位移为目标的钢支撑轴力伺服系统. 其思路是通过控制安装在钢支撑上的伺服端头对支撑轴力进行实时补偿,实现通过提高支撑轴力控制地连墙水平位移的目的.
开展不同开挖状态下的地连墙支护体系受力、变形动态调整方法研究,将支撑轴力和基坑位移控制在最优范围内非常重要. 因此,本研究提出贴合工程的支护体系动态调节方法,采用验证后的数值模型研究该调节方法的可行性,探讨内支撑不同伸缩方案下支护体系的协调变形规律. 该方法可以指导工程设计和施工,降低工程风险并提高施工质量.
1. 支护体系动态调整思想
图 1

图 2
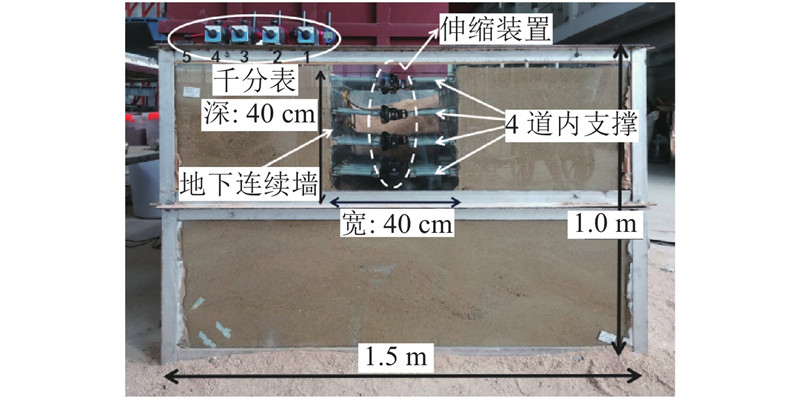
图 3
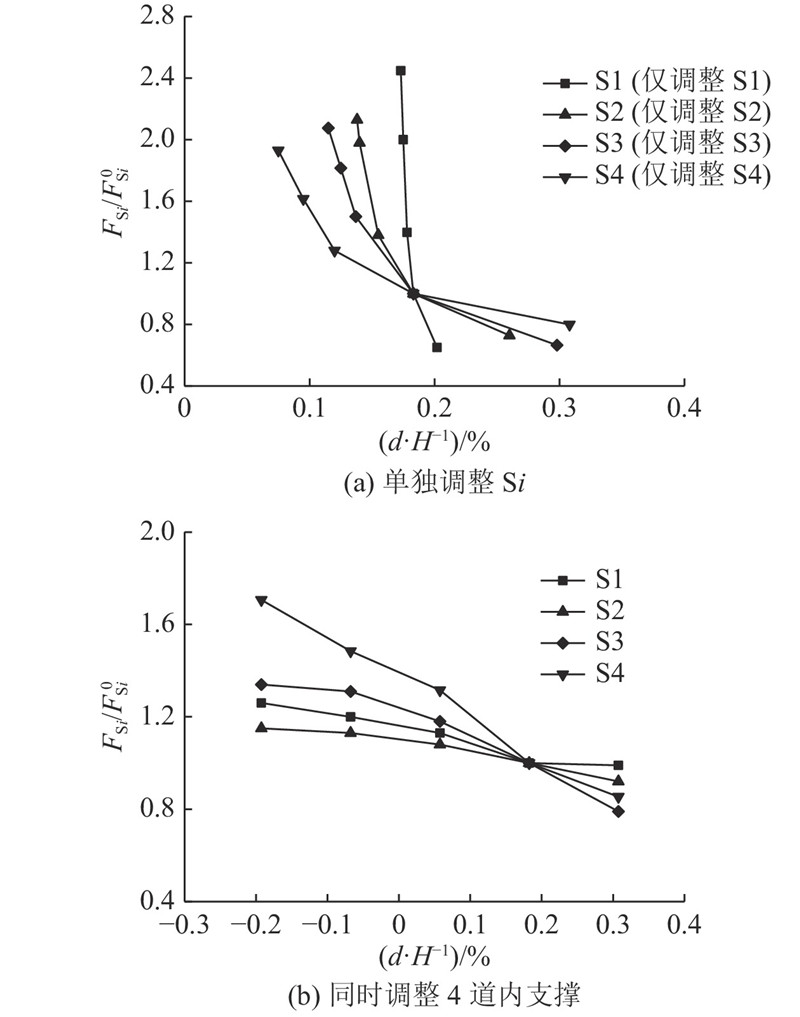
图 3 支撑伸缩对支护体系受力变形特性的影响
Fig.3 Influence of support expansion on mechanical deformation characteristics of support system
不同工程对应的预警值差异较大,设定墙体水平位移预警值为nS0,支撑轴力预警值为mF0,其中S0为最大允许位移,F0为最大允许轴力,n、m取值为(0,1.0). 将上述数据输入计算机控制终端. 在实际工程中,nS0、mF0的设置应充分参考地区规范、周围建筑环境及其他因素;在通过数值试验确定支护系统安全后,才能进行开挖方案和调整方案的制定. 在开挖过程中对轴力和位移进行监测,将监测结果与预警值进行比对,判断支撑长度是否须调整.
该动态调节方法的目标是合理调整支撑长度使基坑支护结构轴力和变形处于最佳区间. 例如,在墙体大变形初期可以增加支撑长度以减小墙体变形. 当支撑轴力超越预警值时可以减小支撑长度合理释放位移. 如果支护系统应力和变形无法调节至设定的最佳区间内,系统报警,相关人员可以根据反馈数据变更设计方案或施工方案. 支护体系动态调节方法流程图如图4所示.
图 4
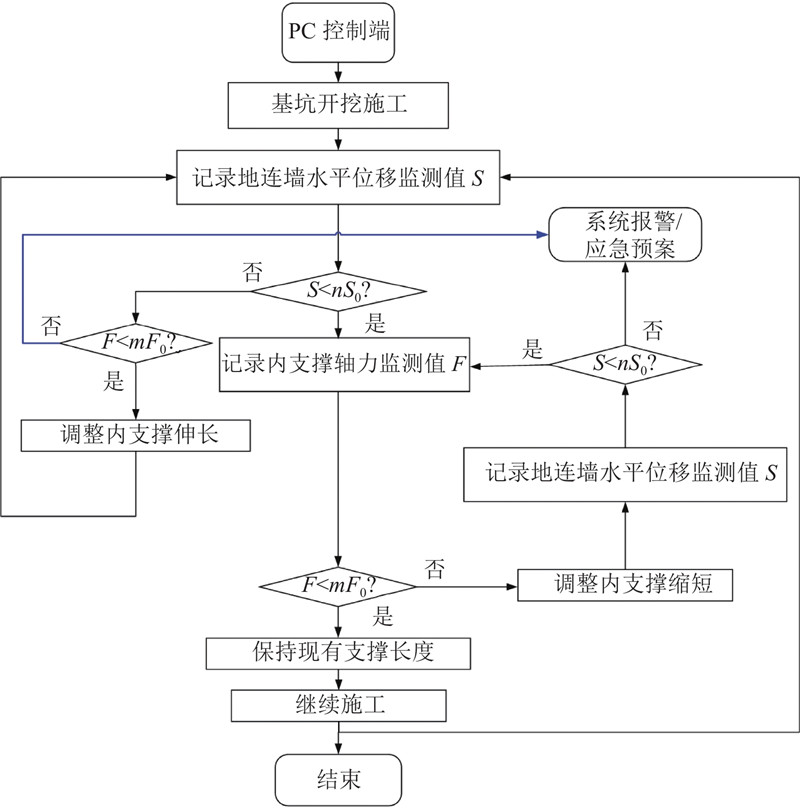
图 4 支护体系动态调节方法流程图
Fig.4 Flow chart of dynamic adjustment method of support system
2. 数值模型验证与可行性分析
2.1. 工程问题
图 5
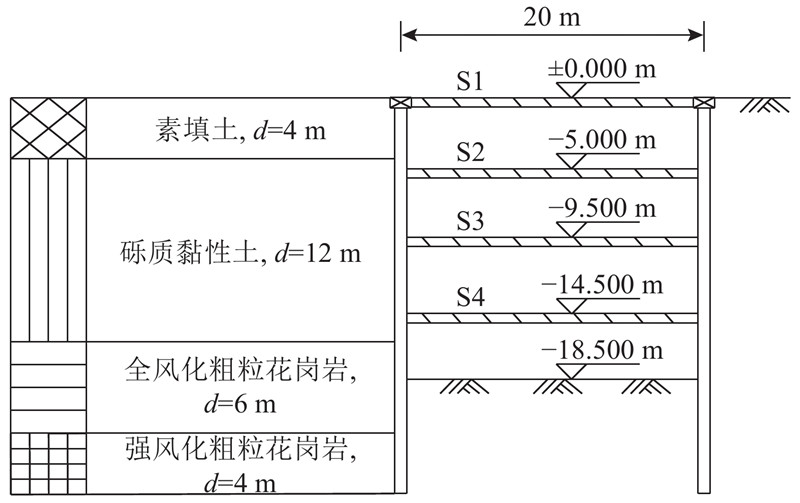
表 1 地层与支护体系材料参数
Tab.1
| 材料 | E/MPa | μ | φ/(°) | c/kPa | ρ/(kg∙m−3) |
| 素填土 | 5 | 0.340 | 18.0 | 5.0 | 1780 |
| 砾质黏性土 | 10 | 0.300 | 23.5 | 27.5 | 1840 |
| 全风化粗粒花岗岩 | 55 | 0.300 | 27.5 | 30.0 | 1900 |
| 强风化粗粒花岗岩 | 400 | 0.300 | 30.0 | 35.0 | 1950 |
| 中风化粗粒花岗岩 | 2000 | 0.260 | 40.5 | 40.5 | 2400 |
| 地连墙 | 31.5×103 | 0.167 | − | − | 2500 |
| 砼支撑(S1) | 31.5×103 | 0.167 | − | − | 2500 |
| 钢支撑(S2/S3/S4) | 200.0×103 | 0.167 | − | − | 7800 |
2.2. 数值模型与参数
数值模拟工况如下:1)初始地应力平衡,位移清零;2)设置地连墙;3)设置S1;4)开挖至−5.00 m,设置S2;5)开挖至−9.50 m,设置S3;6)开挖至−14.50 m,设置S4;7)开挖至−18.50 m.
图 6
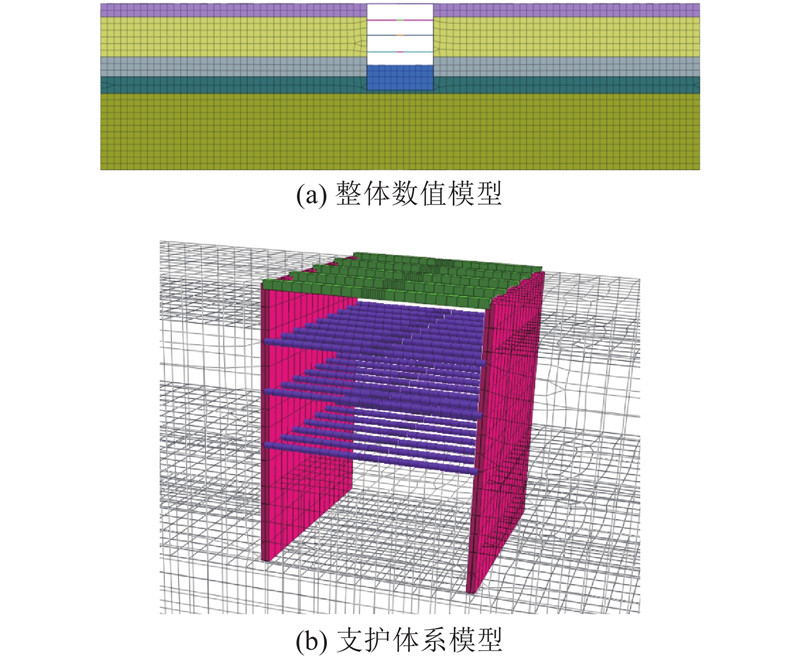
表 2 地连墙与土体间接触面参数
Tab.2
| 接触关系 | kn / GPa | ks / GPa | c/kPa | φ/(°) | Ψ/(°) |
| 土层-地连墙 | 3×105 | 3×105 | 0 | 28 | 0 |
2.3. 数值模型结果验证
如图7(a)所示为开挖结束后数值模拟与实测地连墙位移x的对比曲线. 图中,Hwall为墙体深度. 可以看出,模拟结果与现场实测结果变化趋势相同,xmax位于深度13.00 m处,模拟值为15.80 mm,实测值为16.38 mm. 地连墙位移最大值的模拟与实测结果的差异为3.7%.
图 7
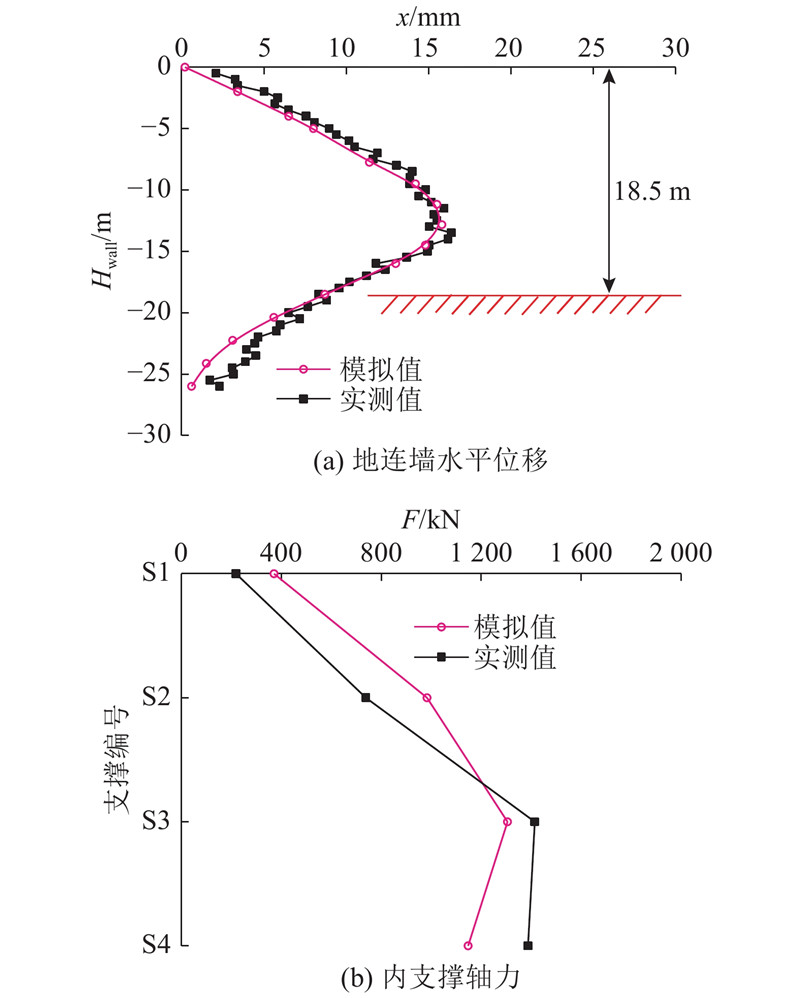
图 7 开挖结束后支护体系受力变形特性对比曲线
Fig.7 Comparison curve of axial force and displacement of support system after excavation
如图7(b)所示为开挖结束后内支撑轴力F的对比曲线. 模拟结果与实测结果变化趋势相同,S1和S2模拟结果略大于实测结果,S3和S4模拟结果略小于实测结果,轴力最大值的模拟与实测结果的差异为8.4%. 导致S1、S2轴力差异的原因可能有以下3方面:1) 地基各土层分布不均匀;2) 未能及时架设支撑;3) 受开挖顺序与开挖量的影响较大. 导致S3、S4轴力差异的原因可能是局部较大的实测位移导致S3、S4压缩量增加,从而导致S3、S4实测轴力增大.
数值模拟所得地连墙水平位移分布规律及内支撑轴力分布规律与现场实测结果基本一致,验证了数值模型的可靠性.
2.4. 支护体系协调可行性分析
当基坑开挖至−14.5 m时,支护体系局部应力集中问题将对后续施工带来风险. 结合动态调整构想,在确保安全的前提下主动缩短支撑将有利于缓解支护体系局部应力集中风险. 调整后的地连墙位移和支撑轴力如图8所示,控制S2、S3长度同时减小10 mm(0.50‰L,L为内支撑初始长度),墙体最大位移增加30.9%,支撑最大轴力减小15.3%.
图 8
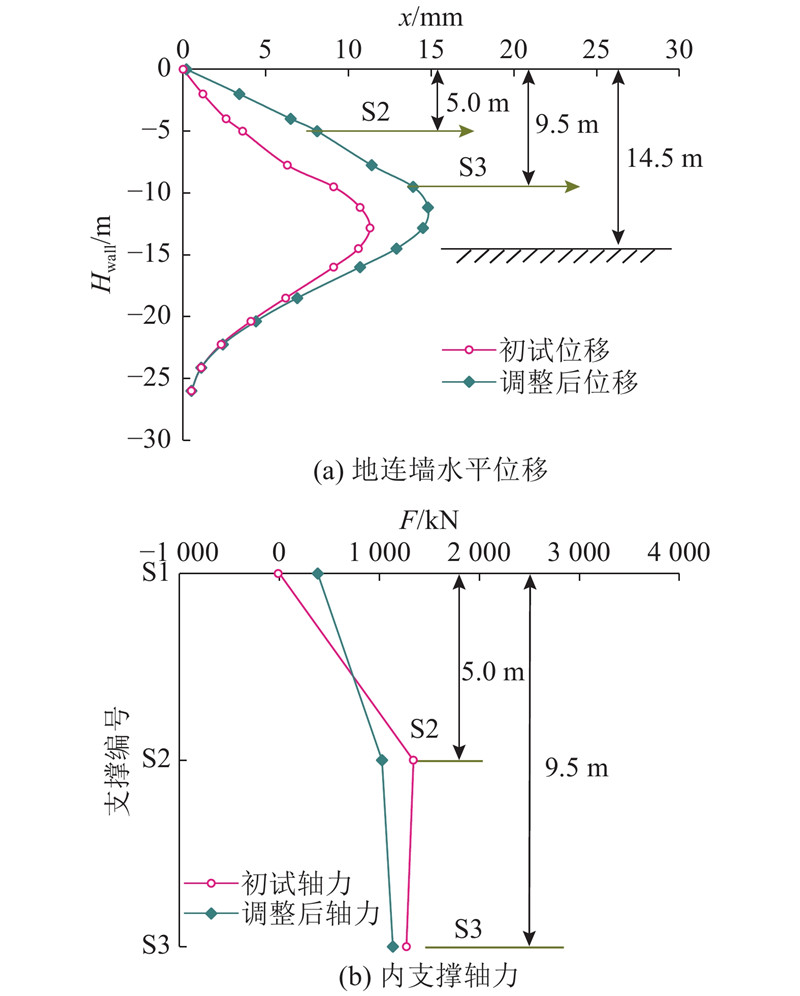
图 8 S2、S3缩短10 mm方案下支护体系受力变形规律
Fig.8 Law of axial force and deformation of support system under scheme of shortening 10 mm for S2 and S3
针对地连墙位移过大时,支护体系动态调整影响规律如图9所示. 过大的墙体变形会影响施工,而伸长支撑可以抑制墙体位移. 同时调节支撑S2、S3、S4纵向增加10 mm(0.50‰L),墙体最大位移减小23.7%,支撑最大轴力增加11.6%.
图 9
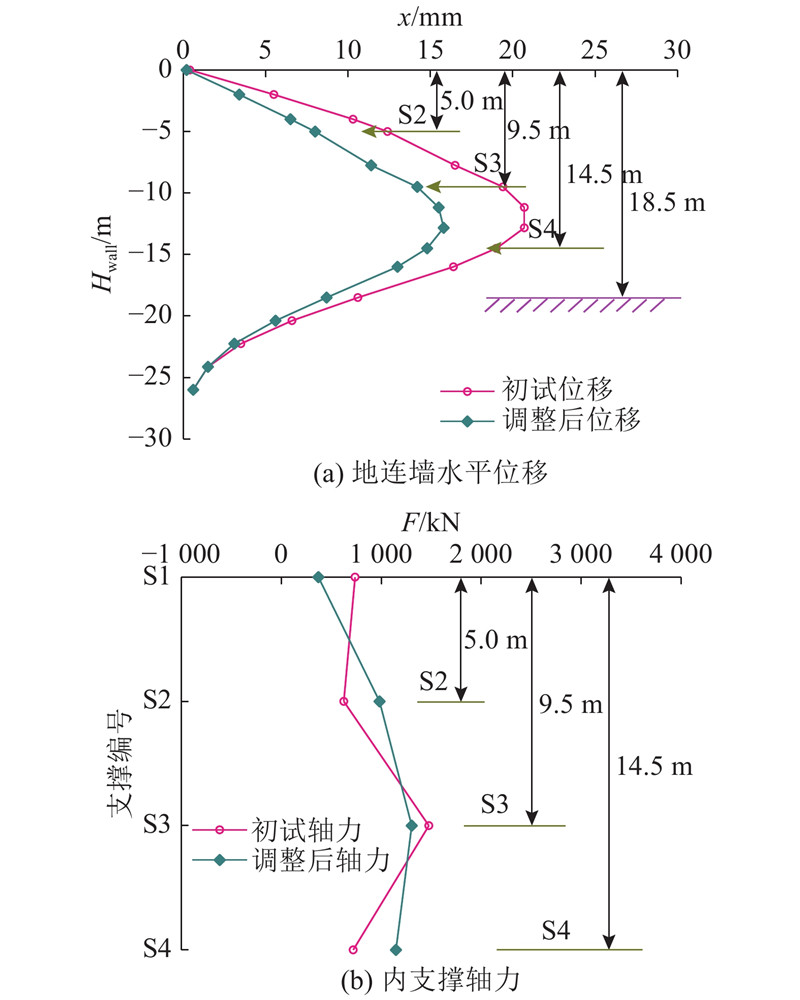
图 9 S2~S4伸长10 mm方案下支护体系受力变形规律
Fig.9 Law of axial force and deformation of support system under scheme of elongating 10 mm for S2, S3 and S4
支护体系动态调整方法的核心在于通过调节支撑长度促使支护体系内力重新分布,使支护体系受力及变形更加均衡稳定并动态保持在最优区间内. 模拟结果表明,支护体系内支撑动态调整方法具有可行性.
3. 动态调整时的受力与变形规律
为了探究某一道或多道支撑同时进行长度调节对支护体系受力特性的影响规律,在开挖结束后控制S2~S4中的一个或多个进行缩短2~8 mm(0.10‰L~0.40‰L)或伸长2~8 mm的研究. 为了简化表述,对研究工况进行分类定义,如表3所示.
表 3 支护体系动态调整工况表
Tab.3
| 工况 | 调整方式 |
| A | 调整S2的长度 |
| B | 调整S3的长度 |
| C | 调整S4的长度 |
| D | 调整S2和S3的长度 |
| E | 调整S2和S4的长度 |
| F | 调整S3和S4的长度 |
| G | 调整S2、S3和S4的长度 |
3.1. 地连墙水平位移变化规律
不同调节方式下地连墙水平位移变化规律如图10所示. 如图10(a)所示,调节S2,墙体位移变化集中在0~0.6H(H为基坑开挖深度),其中S2接触处墙体位移变化最显著,S2平均每变化1 mm(0.05‰L)引起0.35 mm(0.019‰H)的位移变化. 在调节过程中墙体最大位移保持不变. 如图10(b)所示,调节S3,墙体位移变化集中在0.3H~0.8H,其中S3接触处墙体位移浮动最大,S3平均每变化1 mm(0.05‰L)引起0.30 mm(0.016‰H)的位移变化量. 在调节过程中墙体最大位移及其位置均发生改变. 如图10(c)所示,调节S4,土体变形影响集中在0.6H~1.1H,其中S4接触处墙体位移浮动最大,S4平均每变化1 mm(0.05‰L)引起0.35 mm(0.019‰H)的位移变化.
图 10
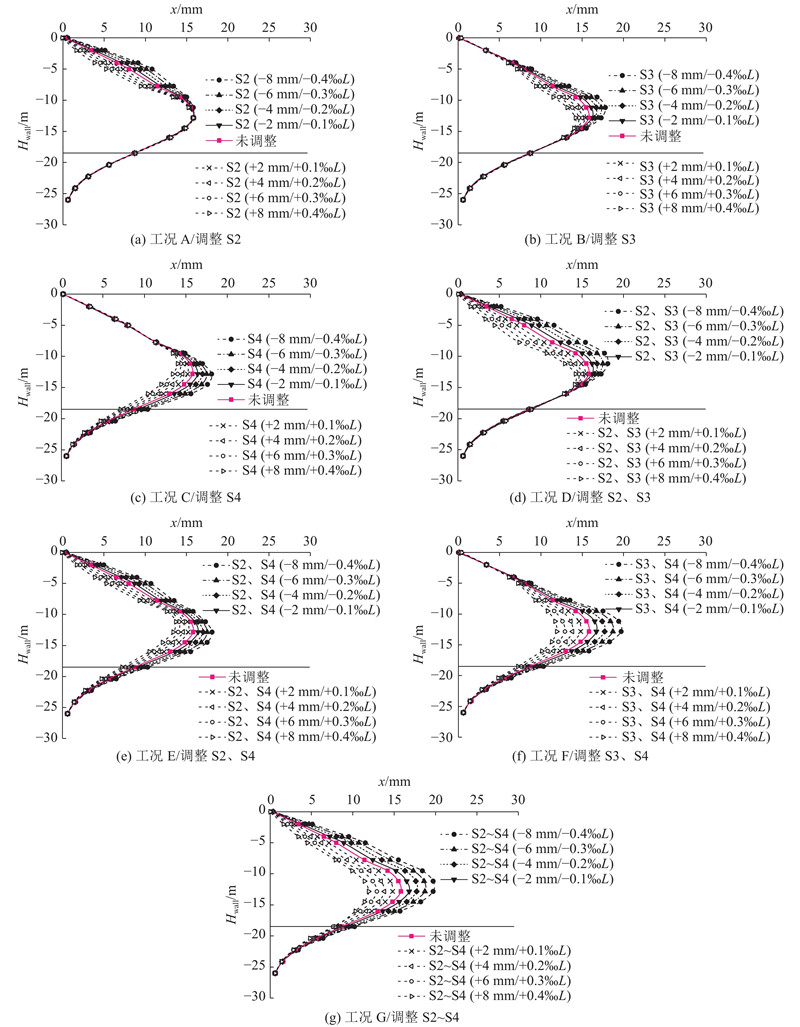
图 10 不同调整方案下地连墙水平位移
Fig.10 Horizontal displacement of diaphragm wall under different adjustment schemes
如图10(d)所示,同时调节S2、S3,土体变形影响集中在0~0.8H深度,其中0.42H处墙体位移浮动最大,S2、S3长度平均每变化1 mm(0.05‰L)引起0.50 mm(0.027‰H)的位移改变. 如图10(e)所示,同时调节S2、S4,土体变形影响集中在0~1.1H,其中0.27H处墙体位移浮动最大,S2、S4平均每变化1 mm(0.05‰L)引起0.35 mm(0.019‰H)的位移变化. 地连墙最大位移始终位于0.69H处. 如图10(f)所示,同时调节S3、S4,土体变形影响集中在0.4H~1.1H,其中0.69H处(即墙体最大位移点)墙体位移浮动最大,S3、S4平均每变化1 mm(0.05‰L)引起0.45 mm(0.024‰H)的位移变化. 如图10(g)所示,同时调节S2~S4,土体变形影响集中在0~1.1H,其中0.69H处墙体位移浮动最大,S2~S4平均每变化1 mm(0.05‰L)引起0.50 mm(0.027‰H)的位移变化.
定义支撑平均调整单位长度为1 mm(0.05‰L),各土层最大水平位移xmax±∆x与初始最大水平位移xmax的比值为土体变形敏感值. 不同方案各土层变形敏感值如表4所示,对土层从上到下编号为1~4. 可以看出,方案A对土层1变形敏感值的影响最大;方案B对土层2变形敏感值的影响最大;方案C对土层3变形敏感值的影响最大;方案D对土层1和2变形敏感值的影响最大;方案E对土层1和3变形敏感值的影响最大;方案F对土层2和3变形敏感值的影响最大;方案G对土层1和3变形敏感值的影响最大.
表 4 各土层变形敏感值
Tab.4
| 方案 | 土层1 | 土层2 | 土层3 | 土层4 |
| A,伸 | 100%−5.4% | 100% | 100% | 100% |
| A,缩 | 100%+5.4% | 100% | 100% | 100% |
| B,伸 | 100%−1.5% | 100%−1.3% | 100%−0.3% | 100% |
| B,缩 | 100%+1.5% | 100%+1.6% | 100%+0.3% | 100% |
| C,伸 | 100%+0.2% | 100%−1.4% | 100%−2.5% | 100%−1.6% |
| C,缩 | 100%−0.4% | 100%+1.8% | 100%+2.5% | 100%+1.6% |
| D,伸 | 100%−6.2% | 100%−1.3% | 100%−0.2% | 100%−0.4% |
| D,缩 | 100%+6.0% | 100%+1.8% | 100%+0.1% | 100%+0.4% |
| E,伸 | 100%−5.0% | 100%−1.7% | 100%−2.4% | 100%−1.6% |
| E,缩 | 100%+4.8% | 100%+1.8% | 100%+2.4% | 100%+1.6% |
| F,伸 | 100%−0.8% | 100%−3.1% | 100%−2.8% | 100%−1.2% |
| F,缩 | 100%+0.6% | 100%+3.1% | 100%+2.7% | 100%+1.2% |
| G,伸 | 100%−6.0% | 100%−3.1% | 100%−2.6% | 100%−1.2% |
| G,缩 | 100%+5.8% | 100%+3.1% | 100%+2.6% | 100%+1.2% |
3.2. 内支撑轴力变化规律
不同调节方式支撑轴力变化规律如图11所示. 图中,∆LSi / L为支撑长度调整绝对值∆LSi与支撑长度初始值L的比值,负值表示长度缩短,正值表示伸长. 可以看出,内支撑轴力系数呈线性变化. 此处定义轴力波动系数为调整支撑单位长度所引发的支撑轴力的变化值与初始轴力的比值的绝对值.
图 11
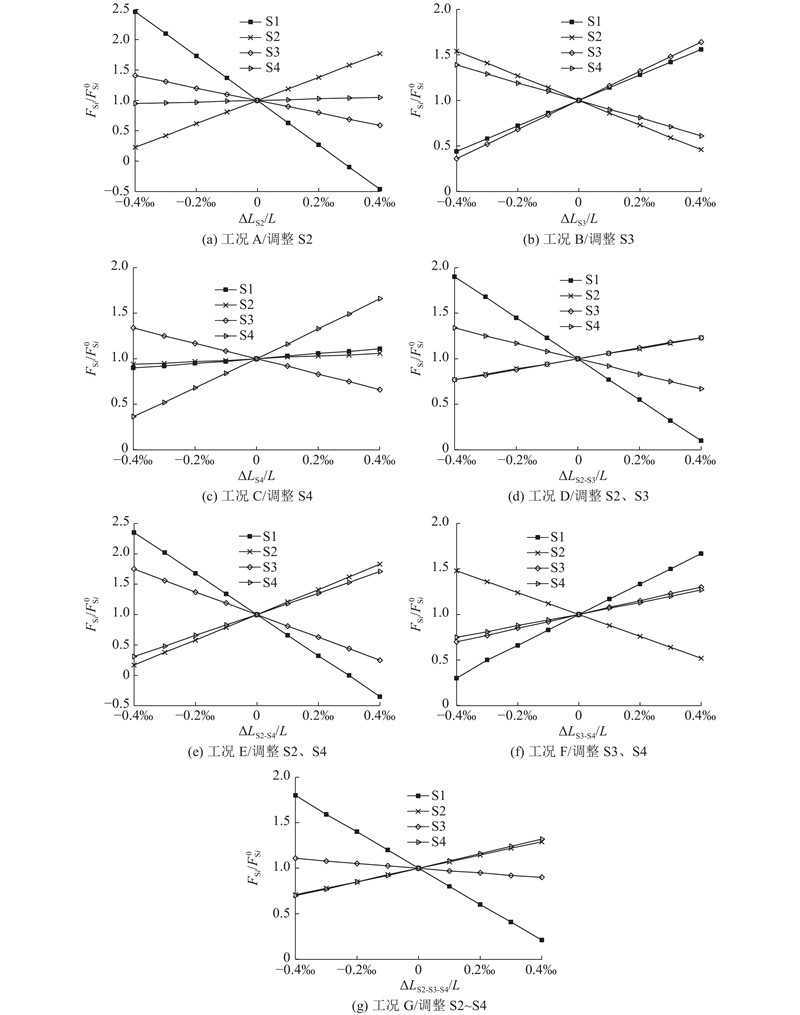
图 11 不同调整方案下内支撑轴力
Fig.11 Axial force of internal support under different adjustment schemes
如图11(a)所示,调节S2影响S1和S3的轴力(S1、S3与S2轴力变化趋势相反),其中S1、S3、S2轴力波动系数分别为18.5%/mm、5.0%/mm、9.5%/mm. 在调整过程中S4轴力波动系数小于5%,可以忽略. 如图11(b)所示,调节S3同时影响S1、S2、S4轴力,S1与S3轴力变化趋势相同,S2、S4与S3轴力变化趋势相反. S1~S4轴力波动系数分别为7.00%/mm、6.75%/mm、8.00%/mm、5.00%/mm. 如图11(c)所示,调节S4影响S3轴力,S3轴力变化趋势与S4相反,其中S3、S4轴力波动系数分别为4.25%/mm、8.25%/mm. 在调整过程中S1、S2轴力波动系数小于6%,可以忽略.
如图11(d)所示,调节S2、S3影响S1、S4轴力,S2、S3与S1、S4轴力变化趋势相反,S1~S4轴力波动系数分别为11.250%/mm、2.875%/mm,2.875%/mm、4.250%/mm. 如图11(e)所示,调节S2、S4影响S1、S3轴力,S2、S4与S1、S3轴力变化趋势相反,S1~S4轴力波动系数分别为16.875%/mm、10.375%/mm、9.375%/mm、8.875%/mm. 如图11(f)所示,调节S3、S4影响S1、S2轴力,S1、S3、S4与S2轴力变化趋势相反,S1~S4轴力波动系数分别为8.375%/mm、6.000%/mm、3.750%/mm、3.250%/mm. 如图11(g)所示,调节S2、S3、S4影响S1轴力,S2、S4与S1轴力变化趋势相反,S1、S2、S4轴力波动系数分别为10.000%/mm、3.625%/mm、3.875%/mm. 在调整过程中S3轴力波动系数小于10%,可以认为其保持稳定.
3.3. 轴力位移协调变形规律研究
图 12
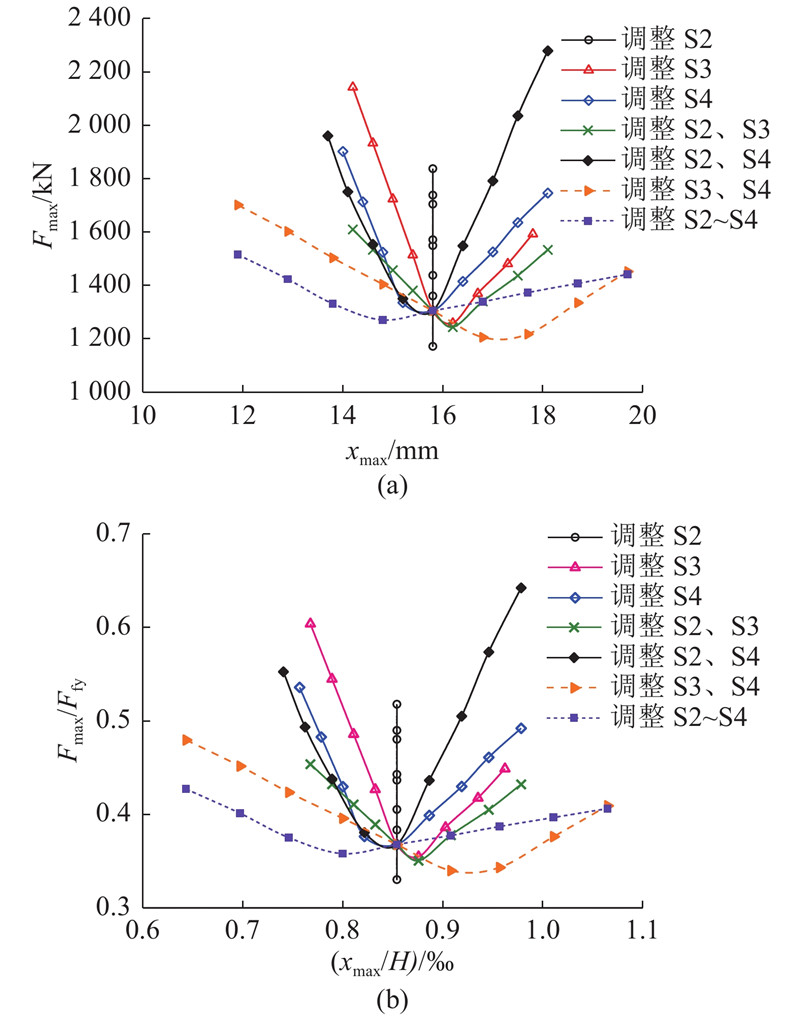
图 12 支护体系协调变形关系曲线
Fig.12 Coordinated deformation relationship curve of support system
不同调节方式下的斜率绝对值(单调区间内最大轴力差值与最大水平位移差值的比值)的数值大小关系如下:
式中:∆Fmax为Fmax-xmax关系曲线中单调区间内纵坐标最大轴力的差值;∆xmax为曲线中单调区间内横坐标最大水平位移的差值. 斜率绝对值越小,表示此调节方案对支护体系受力和变形调节能力越强. 在本研究条件下同时调节S2~S4,可以实现对支护体系受力最高效率的调节.
减小支撑长度会进一步释放地连墙位移,同时减小本道支撑轴力;增加支撑长度可以抑制墙体位移,但会增大本道支撑轴力. 可知F与x是具有相互制衡关系的协调变形参数组,在不同支撑轴力下存在不同的位移分布曲线. 这也是本研究所强调的支护体系协调变形规律.
图 13
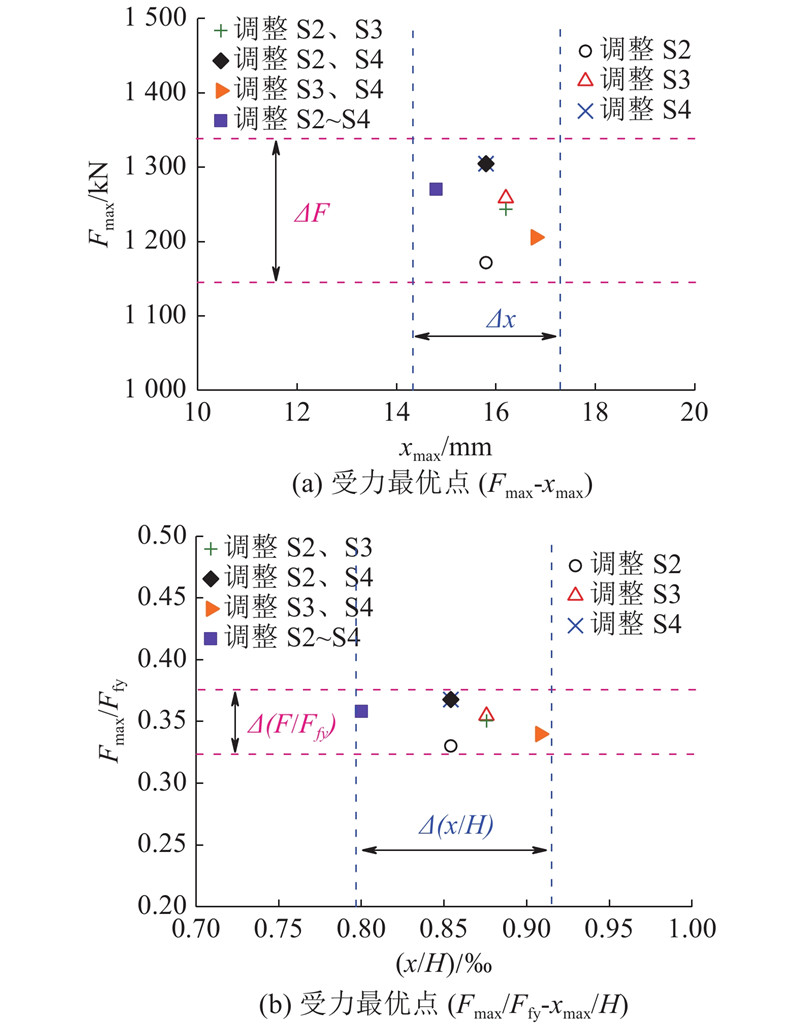
图 13 支护体系最佳受力点散点图
Fig.13 Scatter diagram of optimum stress points of support system
由图13可知,通过支撑长度调节,将支护体系受力及变形分别控制在(Fo max,Fo max+∆Fmax)和(xo max,xo max+∆xmax),或(Fo max/Ffy,Fo max/Ffy+∆(Fmax/Ffy))和(xo max/H,xo max/H+∆(xmax/H)),有利于提高支护体系利用效率,通过协调变形思想合理规范支撑轴力和地连墙位移. 上述思想对指导实际基坑工程设计与建设具有借鉴意义. 本研究背景下的支护体系最佳受力变形区间如下:Fmax/Ffy=0.32~0.38,xmax/H=0.80‰~0.92‰.
探究支撑伸缩时支撑轴力与地连墙水平位移协调变形规律,有利于解决实际工程设计与建设中的3个问题:1) 限定最大轴力条件下的地连墙水平位移合理值设计及其建设工作;2) 限定地连墙最大位移条件下的支撑轴力合理值设计及其建设工作;3) 安全条件下支撑轴力与地连墙位移协调变形最优解设计及其建设工作. 上述支护体系协调变形思想可以为设计与施工提供思路上的借鉴.
4. 讨 论
本研究所提出的支护体系协调变形动态调整方法的思路是通过动态调整使支撑和地连墙两者受力变形性状都稳定在最优区间内. 支护体系动态调整方案实施过程如下:1)首先利用数值模拟结果对设计方案进行校核,摒弃设计弊端. 2)在最大允许值S0和F0基础上进一步确定n和m,输入PC端. 3)对地连墙水平位移S进行实时监测,并与nS0进行比较. 4)若位移S>nS0,且轴力监测数据F>mF0,说明设计存在弊端,无法调节至预定区间,系统报警并采取应急预案. 若位移S>nS0,且轴力F<mF0,说明支撑轴力不足,则调节支撑伸长并再次进入步骤3). 若位移S<nS0,且轴力F>mF0,说明支护体系局部应力集中,则调节支撑缩短并再次进入步骤3). 5)若位移S<nS0,且轴力F<mF0,表明支护体系受力、变形符合设计要求,应保持现有支撑长度继续施工,并再次进入步骤3)循环,直至施工结束.
此处初设的nS0、mF0并非固定值,而应根据现场情况及要求进行实时变化. 另外,建议根据基坑工程设计和监测规范中提供的最大允许值和设计允许值作为上限确定S0、F0,并结合工程经验及数值模拟得出的最优区间(Fmax - xmax、Fmax/Ffy-xmax/H曲线)综合确定n、m.
本研究讨论了4层支撑结构体系的受力特性. 然而,在工程中支撑系统可能包括5层或更多层,结果也各有不同. 因此,提出反映支护结构动态调节思想的适用于多种情况的力学解析模型以供参考.
根据本研究支护体系动态调整方法的思路,支撑长度调整后的内支撑模型可以简述为“支撑弹簧”的边界模型. 具体表述如下:
式中:
弹性地基梁法将单位宽度的地连墙简化成弹性梁,坑内土体简化为土弹簧,坑外土体简化为水土压力. 结合如图14所示的弹性地基梁简化模型,将边界条件代入可以得到支护系统的平衡方程:
图 14
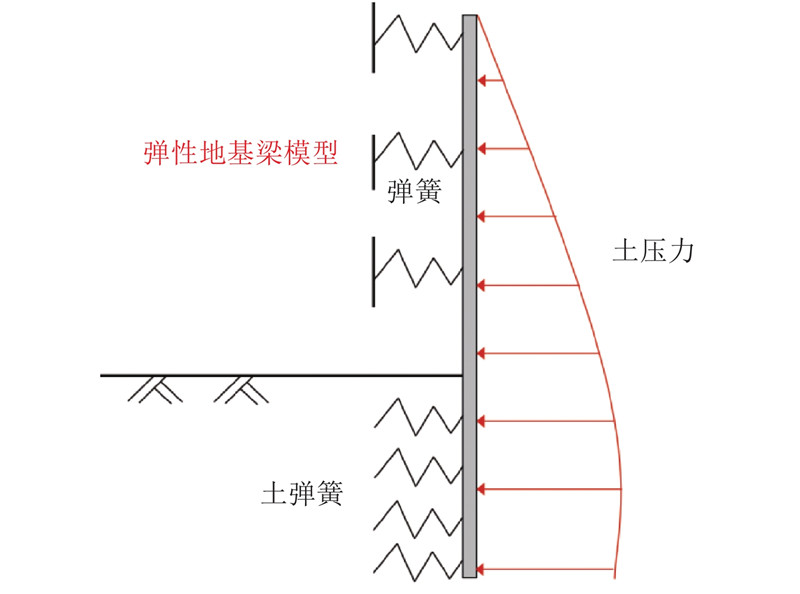
图 14 基于弹性地基梁法的计算模型示意图
Fig.14 Schematic diagram of calculation model based on elastic foundation beam method
式中:
内支撑体系调整过程中的平衡方程可以简化为
式中:
最终墙体变形平衡方程为
式中:
由式(4)可得,内支撑长度变化
联立式(5)、(6),并消去支撑长度变化
式中:
由式(7)可得,内支撑Si动态调整后的墙后土压力表达式如下:
5. 结 论
(1)所提出的支护体系受力变形动态调整方案可以解决工程中支护结构因轴力不足引发墙体位移增大或因局部应力集中导致支撑轴力急剧增大甚至失稳的问题.
(2)大量伸长支撑能够有效减小地连墙水平位移,但会导致内支撑轴力急剧增大,甚至导致支撑屈曲失稳连续破坏. 大量缩短支撑长度可以有效减小支撑轴力,但同时也可能在一定程度上导致地连墙位移快速增加. 在工程中应寻找合理的受力平衡点并将支护结构受力参数控制在最优区间内.
(3)得到本工程的支护体系协调变形曲线(即Fmax- xmax曲线或Fmax/Ffy- xmax/H曲线). 本工程支护体系最优区间为Fmax/Ffy=0.32~0.38,xmax/H=0.80‰~0.92‰. 建议类似工程将支护体系受力变形控制在(Fo max,Fo max+∆Fmax)和(xo max,xo max+∆xmax)区间,或(Fo max/Ffy,Fo max/Ffy+∆(Fmax/Ffy))和(xo max/H,xo max/H+∆(xmax/H))区间,将有利于提高支护结构利用效率.
(4)本研究尚未涉及各道支撑差异伸缩条件下的协调变形规律. 不同支撑差异伸缩的动态调整方案更符合实际工程支护体系动态调整的需要,须进一步研究.
致 谢
感谢中国地质大学(武汉)工程学院地下空间工程系博士生张玉琦、硕士生袁山、硕士生孙梦尧等3位同学对本研究工作给予的帮助与支持.
参考文献
Three-dimensional effects for supported excavations in clay
[J].DOI:10.1061/(ASCE)1090-0241(2007)133:1(30) [本文引用: 1]
The analysis of spatial effect of deep foundation pit in soft soil areas
[J].
Performance of a foundation pit supported by bored piles and steel struts: a case study
[J].DOI:10.1016/j.sandf.2018.05.004 [本文引用: 1]
软土深开挖致地铁车站基坑及邻近建筑变形特性研究
[J].
Analysis of deformation characteristics of foundation pit of metro station and adjacent buildings induced by deep excavation in soft soil
[J].
Performance of a large-scale metro interchange station excavation in Shanghai soft clay
[J].DOI:10.1061/(ASCE)GT.1943-5606.0001681 [本文引用: 1]
Study on soil reinforcement param in deep foundation pit of marshland metro station
[J].DOI:10.1016/j.heliyon.2019.e02836 [本文引用: 1]
Behaviours of wall and soil during pre-excavation dewatering under different foundation pit widths
[J].DOI:10.1016/j.compgeo.2019.103169 [本文引用: 1]
Numerical simulation of deep foundation pit dewatering and optimization of controlling land subsidence
[J].
Cause investigation of damages in existing building adjacent to foundation pit in construction
[J].DOI:10.1016/j.engfailanal.2017.09.016 [本文引用: 1]
考虑地基变形连续的基坑开挖诱发邻近盾构隧道位移预测
[J].
Prediction of shield tunnel displacement due to adjacent basement excavation considering continuous deformation of ground
[J].
Deformation response of an existing tunnel to upper excavation of foundation pit and associated dewatering
[J].DOI:10.1061/(ASCE)GM.1943-5622.0000814 [本文引用: 1]
Mechanical response analysis of the buried pipeline due to adjacent foundation pit excavation
[J].DOI:10.1016/j.tust.2018.04.026 [本文引用: 1]
控制深基坑变形的支撑轴力伺服系统
[J].DOI:10.3321/j.issn:1006-2467.2009.10.016 [本文引用: 1]
Support axial force servo system in deep excavation deformation control
[J].DOI:10.3321/j.issn:1006-2467.2009.10.016 [本文引用: 1]
邻近地铁隧道的软土深基坑变形实测分析
[J].
Deformation of a deep excavation adjacent to metro tunnels in soft soils
[J].
软土地铁深基坑力学状态的施工控制系统研究
[J].
Construction control system of mechanical state of metro deep foundation pit in soft soil
[J].
深厚软土地层紧邻地铁深大基坑分区设计与实践
[J].
Design and practice of partitioning of deep large foundation pits close to subway in thick soft soils
[J].
Investigation of the axial force compensation and deformation control effect of servo steel struts in a deep foundation pit excavation in soft clay
[J].
城市轨道交通车站基坑伺服钢支撑轴力补偿与开挖变形控制效果
[J].
Axial force compensation for urban rail transit station servo steel support and control effect of foundation pit excavation deformation
[J].
轴力自补偿支撑对支护结构受力变形影响研究
[J].
Effect of auto-compensating steel struts on stress and deformation behaviors of supporting structures
[J].
深基坑地连墙支护体系协调变形规律试验研究
[J].
Experimental study on compatible deformation law of diaphragm wall support system for deep foundation pit
[J].
局部破坏对钢支撑排桩基坑支护体系影响的试验研究
[J].
Experimental study on influences of local failure on steel-strutted pile retaining system of deep excavations
[J].
Prediction of movements for braced cuts in clay
[J].
基坑钢支撑伺服系统应用技术研究
[J].
Research on application technology of steel support servo system for foundation pit
[J].
软土基坑伺服钢支撑轴力变化对相邻支撑轴力与围护结构变形的影响
[J].
Effect of axial force adjustment of servo steel struts on axial force of adjacent struts and enclosure structure deformation of foundation pit in soft soil
[J].
Effect of corners in strutted excavations: field monitoring and case histories
[J].DOI:10.1061/(ASCE)1090-0241(1998)124:4(339) [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}