

目前,对于汽车制动系统用滚珠丝杠副振动水平,国内还没有专用检测设备. 虽然多家研究机构已经研制出滚珠丝杠副性能试验机[3-7],但主要是针对机床进给系统用滚珠丝杠副综合性能的检测,包括定位精度、温升、振动和热变形等. 汽车制动系统用滚珠丝杠副具有尺寸小、行程短的特点,其运动方式和载荷谱也与普通的机床用滚珠丝杠副有所不同. 例如,E-Booster用滚珠丝杠副的螺母做旋转运动,丝杠做直线运动,行程只有10~50 mm,且轴向载荷随丝杠直线运动逐渐增大. 另外,传统滚珠丝杠副性能试验机均采用丝杠副-导轨-工作台式结构,其中滚动轴承、滚动导轨与被测滚珠丝杠副具有相似的振动激励源,因此对滚珠丝杠副振动测量结果会造成一定的影响.
针对上述问题,基于汽车制动系统用滚珠丝杠副的结构、尺寸和运动特征,研制其振动检测设备;基于运动学分析,得出在螺母旋转条件下滚珠公转、自转角速度以及通过反向器频率的数学表达式;以某型电动助力制动系统用滚珠丝杠副为试验对象,分析其振动在频域内的特征.
1. 振动测量方法与装置
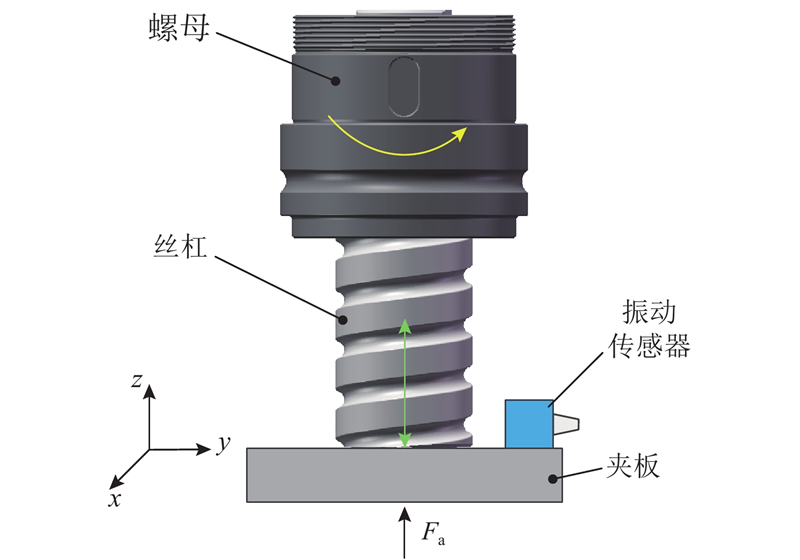
根据汽车制动系统用滚珠丝杠副的结构、尺寸和运动特征,设计其振动测量方法. 滚珠丝杠副的运动方式可以分为螺母旋转和丝杠旋转2种,其中螺母旋转方式在刹车系统中的应用较为普遍. 对于螺母旋转式滚珠丝杠副,在测量时螺母随主轴旋转,丝杠沿直线运动,且在丝杠一端施加轴向载荷,振动传感器通过弹性夹板固定连接在丝杠上,测量丝杠沿x、y、z方向的振动,如图1所示. 如果将振动传感器固定在螺母上,也可以测量丝杠旋转时螺母的振动. 在该方法中,振动传感器固定在丝杠副的直线运动元件上,直线运动元件除了受丝杠副本身和加载装置的约束作用外,不受其他导向和支撑装置的约束,因此,相对于传统的丝杠副-导轨-工作台式结构,有利于提高振动检测精度.
图 1
基于上述测量方法,研制的汽车制动系统用滚珠丝杠副振动检测设备如图2所示. 该设备的组成主要包括:主轴系统、加载系统、振动与噪声测量系统、夹具和减振机架. 主轴一端通过挠性联轴器与电机连接,另一端与被测滚珠丝杠副的夹具连接. 加载系统通过电缸和压缩弹簧向被测滚珠丝杠副施加轴向载荷. 不同型号滚珠丝杠副的直线运动行程不同,而加载弹簧的刚度在选定之后不会变化,因此,对于不同行程的滚珠丝杠副,在测量时载荷变化的范围不同. 为了统一规范,采用最大载荷不变原则进行检测,即对于不同直线运动行程的滚珠丝杠副,保持最大轴向载荷不变,而最小轴向载荷由其直线行程和弹簧刚度决定,同时保证最小轴向载荷大于0. 此处选用的弹簧刚度为16.36 N/mm,当轴向载荷大小为100 N时,弹簧压缩量为6.112 mm,当载荷大小为1000 N时,弹簧压缩量为61.120 mm. 由于设计的最大轴向载荷为1000 N,汽车制动系统用滚珠丝杠副的直线运动行程一般不大于55 mm,所选弹簧能够满足要求.
图 2
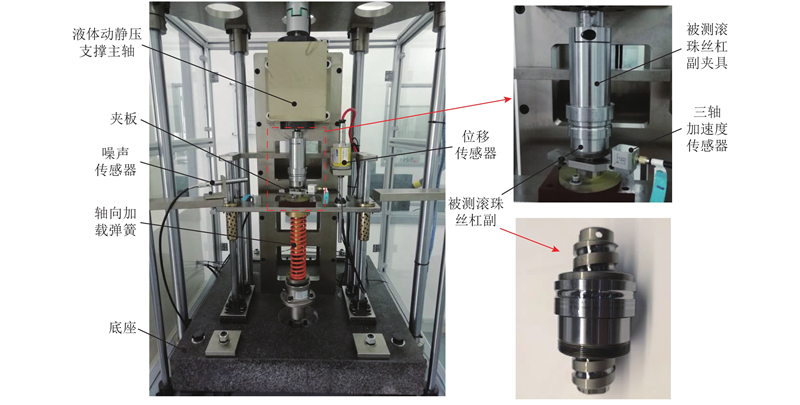
图 2 汽车制动系统用滚珠丝杠副振动测量装置
Fig.2 Vibration detection equipment of ball screw used in automobile braking system
为了减小主轴系统基础振动产生的影响,主轴采用液体动静压轴承支撑,主轴电机支架与主轴组件支架分别固定在下底座和上底座上,并且在上、下个底座之间有隔振垫,用于隔离主轴电机的振动. 上底座采用大理石材料. 另外,为了减小加载系统基础产生的影响,通过树脂或橡胶隔振垫向被测丝杠副加载,将隔振垫固定在加载板上,同时防止被测丝杠或螺母旋转.
试验机采用3个以压电陶瓷为敏感元件的三轴加速度传感器分别测量滚珠丝杠副、主轴系统和加载系统的振动值. 加速度传感器量程为50g,灵敏度为100 mV/g,测量的振动信号经前置放大器、滤波器、模/数转换后,在计算机中进行处理与分析. 系统采样频率为40 kHz,数字低通滤波器的通带边缘频率为15 kHz,阻带边缘频率为20 kHz. 在检测前先将滚珠丝杠副清洗干净,风干,用基础油润滑,再通过夹具安装在主轴上进行自动加载和检测.
2. 运动分析
图 3
式中:
设丝杠在平面
式中:
当忽略滚珠的陀螺力矩作用时,
同理,设螺母在平面
式中:
再将
由式(6)、(9)可知
式中:
将式(10)代入(13),得到
式中:
将式(11)代入(6),得到
由式(15)、(16)可以得到滚珠的公转角速度和自转角速度.
当螺母旋转驱动时,滚珠相对于丝杠的角速度即为其公转角速度,滚珠相对于螺母的角速度
式中:
3. 振动分析
试验对象为某型电动助力制动系统用滚珠丝杠副,如图2所示,其中滚珠采用内循环方式运动,共有2个循环链,单个循环内的滚珠数量为22,滚珠半径为1.985 mm,公转半径为14 mm,接触角为45°,导程为10 mm. 在振动测量时,作用在丝杠上的轴向载荷最大为1000 N,螺母随主轴旋转,丝杠在竖直方向上作直线运动,振动传感器固定于丝杠下端.
以主轴转速为560 r/min时的检测为例,在去除基础振动后,加载和卸载过程的丝杠振动信号如图4所示. 图中,Ax、Ay、Az为x、y、z方向的振动幅值. 被测丝杠副的直线运动行程仅为35 mm,单行程时间短,因此,振动信号为非平稳信号. 在振动信号的结尾部分均有低频振荡,主要是丝杠与测量器件的惯性作用产生的.
图 4
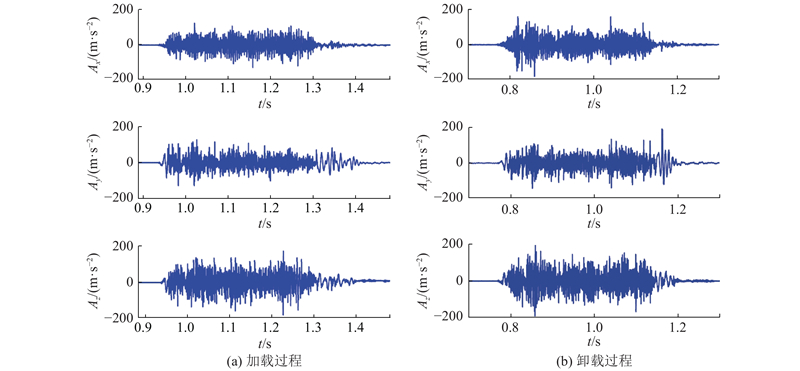
图 5
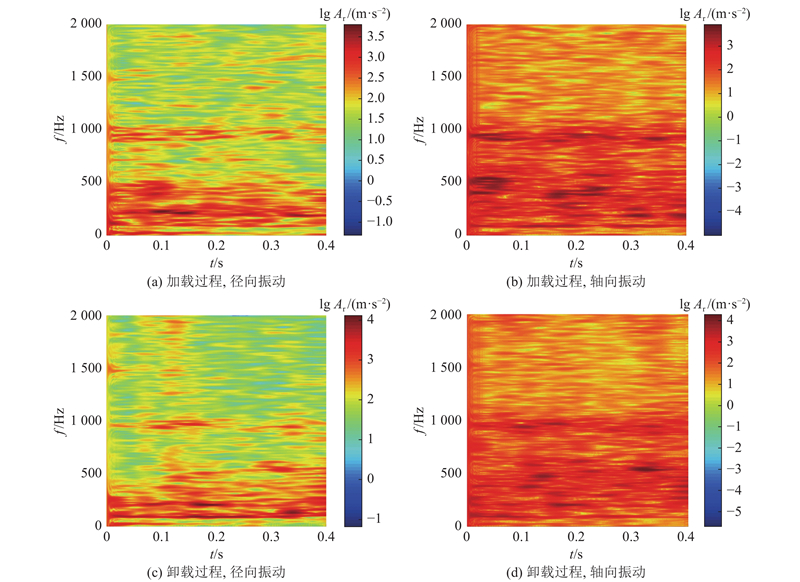
图 5 螺母转速为300 r/min时的丝杠振动幅值时频谱
Fig.5 Time-frequency spectra of screw vibration with nut rotation speed of 300 r/min
图 6
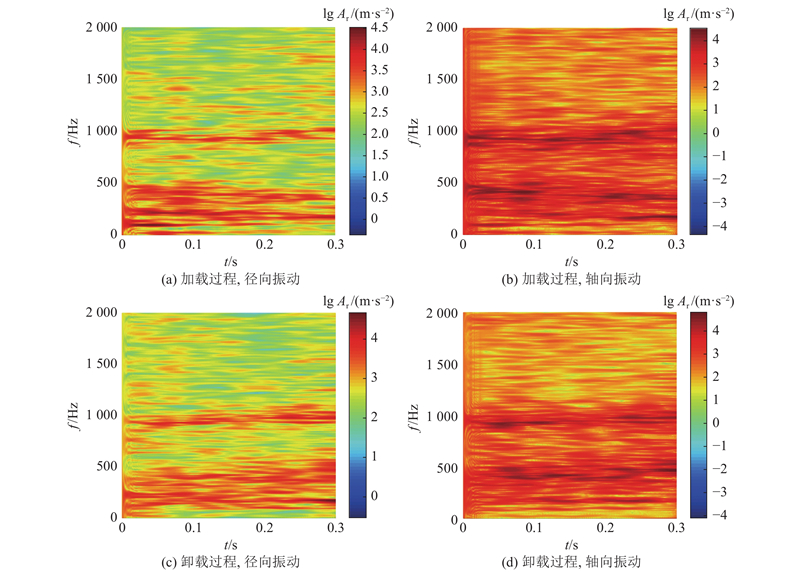
图 6 螺母转速为560 r/min时的丝杠振动幅值时频谱
Fig.6 Time-frequency spectra of screw vibration with nut rotation speed of 560 r/min
图 7
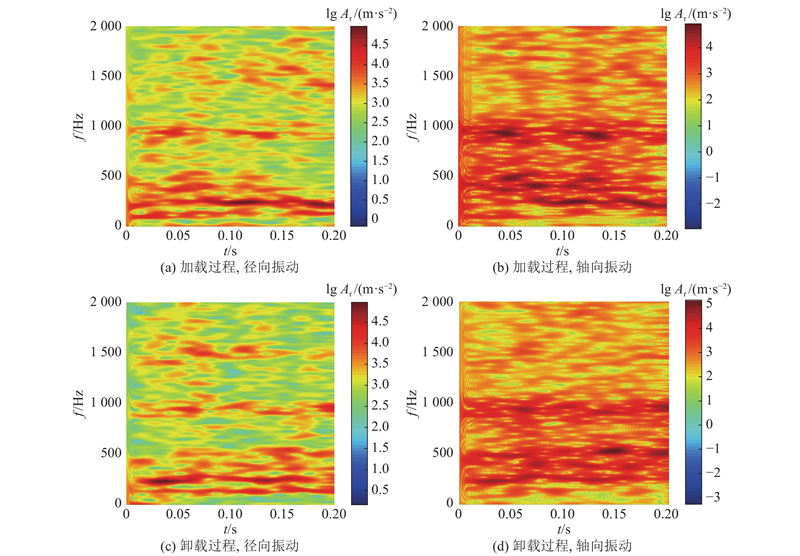
图 7 螺母转速为800 r/min时的丝杠振动幅值时频谱
Fig.7 Time-frequency spectra of screw vibration with nut rotation speed of 800 r/min
图 8
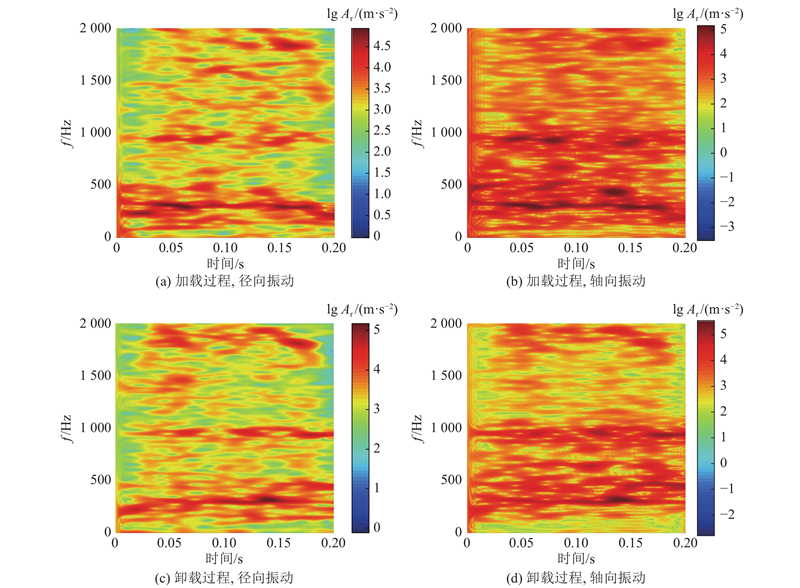
图 8 螺母转速为1000 r/min时的丝杠振动幅值时频谱
Fig.8 Time-frequency spectra of screw vibration with nut rotation speed of 1000 r/min
由图可以看出,随着转速升高,加载过程和卸载过程的振动幅值均逐渐增大,振动频率也逐渐升高. 当螺母转速为300 r/min时,在100、200、950 Hz频率附近出现连续较大的振动幅值,其中100、200 Hz附近分量在径向振动幅值谱中较显著. 当螺母转速为560 r/min时,在190、380、950 Hz频率附近出现连续较大的振动幅值. 当螺母转速为800 r/min时,在130、260、400、530、950 Hz频率附近出现连续较大的振动幅值,其中260 Hz附近分量在径向振动时频图中最为显著,400、530、950 Hz附近分量在轴向振动时频图中较显著,除950 Hz外的4个频带的振动均有随转速变化的趋势,并且在这5个频带之外出现了较多明显的随转速变化的振动分量. 当螺母转速为1000 r/min时,在165、330、490、660、950 Hz频率附近出现连续较大的振动幅值,其中330 Hz附近分量在径向振动时频图中最为显著,除950 Hz外的4个频带振动均有随转速变化的趋势,其他频率范围内的振动分量较800 r/min时更加明显,例如在1800~2000 Hz范围内出现了较大的振动幅值.
根据式(15)可以得出,当滚珠丝杠副的螺母转速为300、560、800、1000 r/min时,滚珠的公转角速度分别为
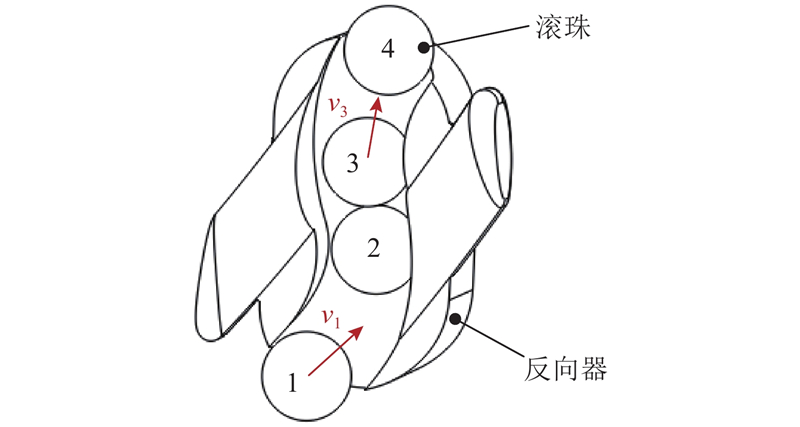
如图9所示,滚珠通过反向器时发生碰撞的原因如下:位于反向器通道入口处的滚珠1因受滚道的挤出作用而具有较高的瞬时速度,从而对反向器和前面的滚珠2产生撞击. 当滚珠2与滚珠3之间存在间隙时,滚珠2因受到滚珠1撞击而速度瞬时增大,继而碰撞滚珠3,同理当滚珠3与滚珠4之间存有间隙时,又会碰撞滚珠4,因此也会引起滚珠通过反向器的倍频振动. 滚珠进入反向器通道时冲击力的大小与其瞬时速度和质量相关,所以通过优化反向器结构减小滚道的挤出作用,以及通过选用小滚珠或者轻质滚珠减小滚珠质量,均有利于降低滚珠冲击产生的振动.
图 9
丝杠和螺母的螺旋滚道波纹度误差也会对振动产生直接作用. 根据滚珠丝杠副的运动关系,丝杠滚道波纹度误差的激励频率
4. 振动评价
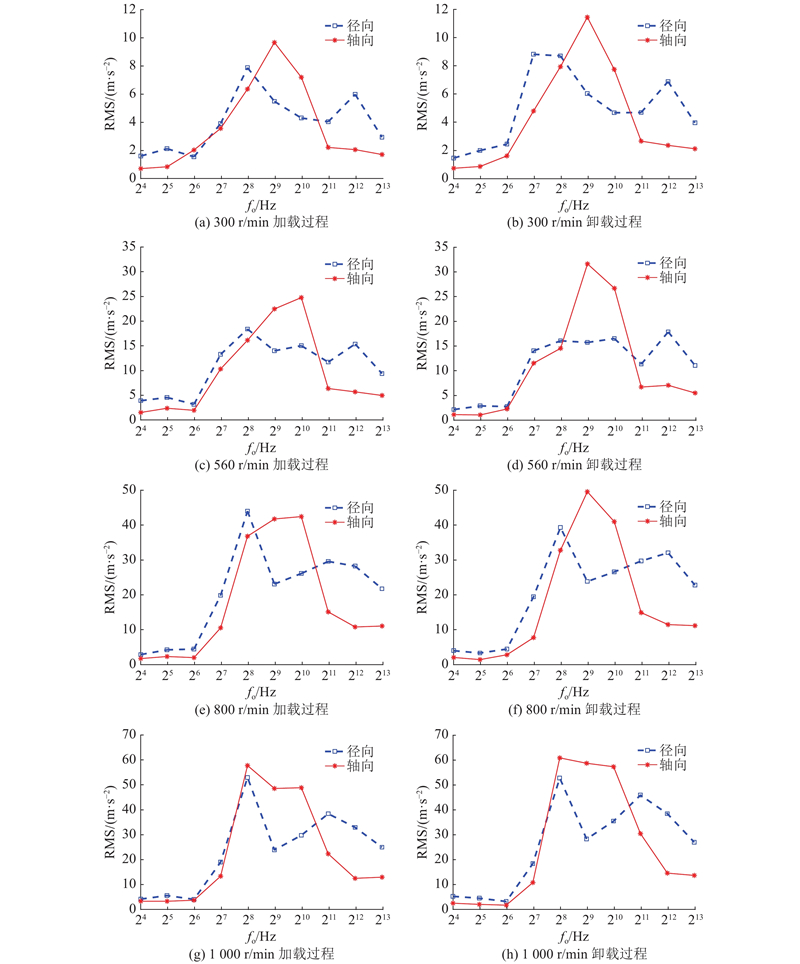
降低噪声是乘用车制动系统用滚珠丝杠副振动检测与分析的主要目标,而汽车的噪声水平通常在倍频程范围内评定,均方根(root mean square,RMS)是衡量振动水平的有效方法,因此,采用一倍频程的RMS来评价滚珠丝杠副的振动水平,结果如图10所示. 图中,fo为中心频率. 当滚珠丝杠副的螺母转速为300 r/min时,径向振动在以125、250、500、4000 Hz为中心频率的一倍频区间内的RMS较大. 当螺母转速为560 r/min时,径向振动在以125、250、500、1000、4000 Hz为中心频率的区间内RMS较大,其中以500、1000 Hz为中心频率的2个区间内的振动值增大较明显. 在这2个较低转速条件下,轴向振动均在以125、250、500、1000 Hz为中心的区间内较大. 当螺母转速增大至800、1000 r/min时,径向振动在以250 Hz为中心频率的区间内RMS最大,是因为这个频率区间包含图7中的260 Hz附近频带和图8中的330 Hz附近频带,同时径向振动在以2000、4000、8000 Hz为中心频率的区间内增大非常显著,轴向振动在以250、500、1000、2000 Hz为中心频率的区间内较大.
图 10
5. 结 论
(1)根据汽车制动系统用滚珠丝杠副的结构、尺寸和运动特征,提出其振动检测方法,研制新型的滚珠丝杠副振动检测设备,用于检测汽车制动系统用滚珠丝杠副的振动水平.
(2)建立螺母旋转式滚珠丝杠副的运动学模型,得到在螺母旋转运动条件下滚珠的公转、自转角速度和滚珠通过反向器的频率表达式.
(3)以某型电动助力制动系统用滚珠丝杠副为试验对象,在螺母旋转驱动以及不同转速条件下测量丝杠沿径向和轴向的振动. 通过分析振动的幅值时频分布特征,发现被测丝杠副在滚珠通过反向器频率及其倍频附近具有较大的振动幅值.
(4)采用一倍频程RMS评价汽车制动系统用滚珠丝杠副的振动水平,得到被测滚珠丝杠副的径向和轴向振动在不同转速条件下的倍频程分布规律,进而可以为该类型滚珠丝杠副的优化设计和汽车制动系统的噪声分析提供参考.
(5)被测滚珠丝杠副的振动频率成分较复杂,其内部各激励源对振动影响的大小难以定量地从振动幅值时频谱中分辨出,须借助非线性动力学理论及非线性振动信号处理方法进一步研究.
参考文献
电动汽车电子机械制动系统的研究与设计
[J].DOI:10.3969/j.issn.2095-0977.2013.01.007 [本文引用: 1]
Research and design of electric automobile electro mechanical brake system
[J].DOI:10.3969/j.issn.2095-0977.2013.01.007 [本文引用: 1]
Design and validation of an electro-hydraulic brake system using hardware-in-the-loop real-time simulation
[J].DOI:10.1007/s12239-017-0060-2 [本文引用: 1]
MATSUMOTO S. Study on load distribution and ball motion of ball screw
[J].
Kinematical analyses and transmission efficiency of a preloaded ball screw operating at high rotational speeds
[J].DOI:10.1016/j.mechmachtheory.2011.02.009
Hybrid modeling of ball screw drives with coupled axial, torsional and lateral dynamics
[J].
Improved screw-nut Interface model for high-performance ball screw drives
[J].
精密滚珠丝杠副轴向振动激励因素的试验研究
[J].DOI:10.3969/j.issn.1004-6801.2008.01.004
Experiment study on exciting factors of axial vibration of precision ball screw
[J].DOI:10.3969/j.issn.1004-6801.2008.01.004
滚珠丝杠副进给系统混合建模及其振动时变性分析
[J].DOI:10.3969/j.issn.1000-3835.2013.20.037
Hybrid modeling and time-varying analysis of vibration for a ball screw drive
[J].DOI:10.3969/j.issn.1000-3835.2013.20.037
滚珠丝杠进给系统动力学建模与动态特性分析
[J].
Dynamic modeling and vibration analysis of ball screw feed driving systems
[J].
Studies on the sound and vibration of a ball screw: 4th report, effects of various factors on sound of a ball screw
[J].DOI:10.1299/kikaic.59.3907 [本文引用: 1]
Studies on the sound and vibration of a ball screw: 5th report, sound caused by random waviness on flank surfaces
[J].DOI:10.1299/kikaic.61.3369 [本文引用: 1]
端块式滚珠丝杠副振动特性分析
[J].
Analysis of vibration characteristic of end: block type ball screw pair
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}