|
|
|
| Stereo visual SLAM algorithm for fusing point-line-plane features in low texture environments |
Ze WANG1( ),Lei RAO1,*(),Guangyu FAN1,Niansheng CHEN1,Songlin CHENG1,Dingyu YANG2,Chuqiao JIANG1 ),Lei RAO1,*(),Guangyu FAN1,Niansheng CHEN1,Songlin CHENG1,Dingyu YANG2,Chuqiao JIANG1 |
1. School of Electronic Information Engineering, Shanghai Dianji University, Shanghai 201306, China
2. State Key Laboratory of Blockchain and Data Security, Zhejiang University, Hangzhou 310058, China |
|
|
|
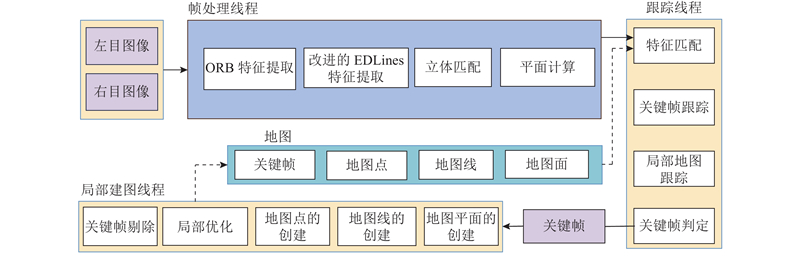
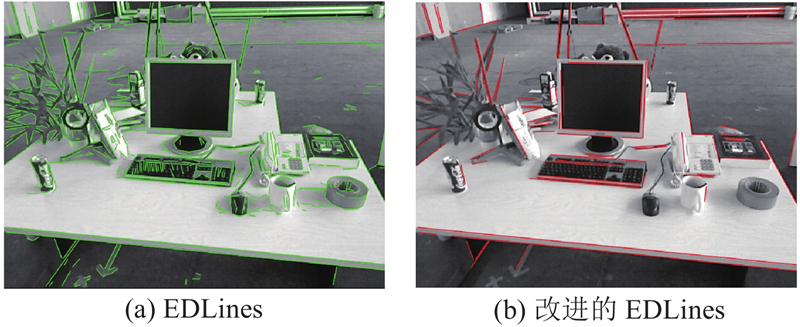
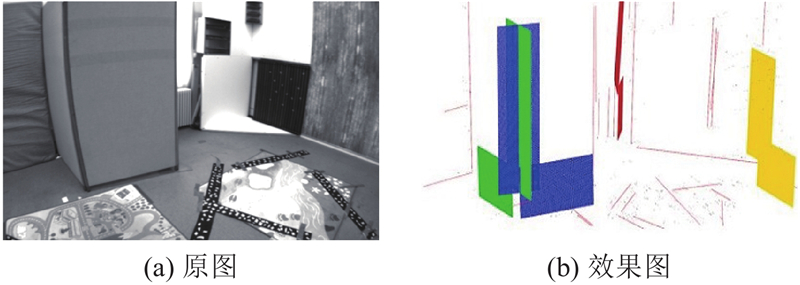
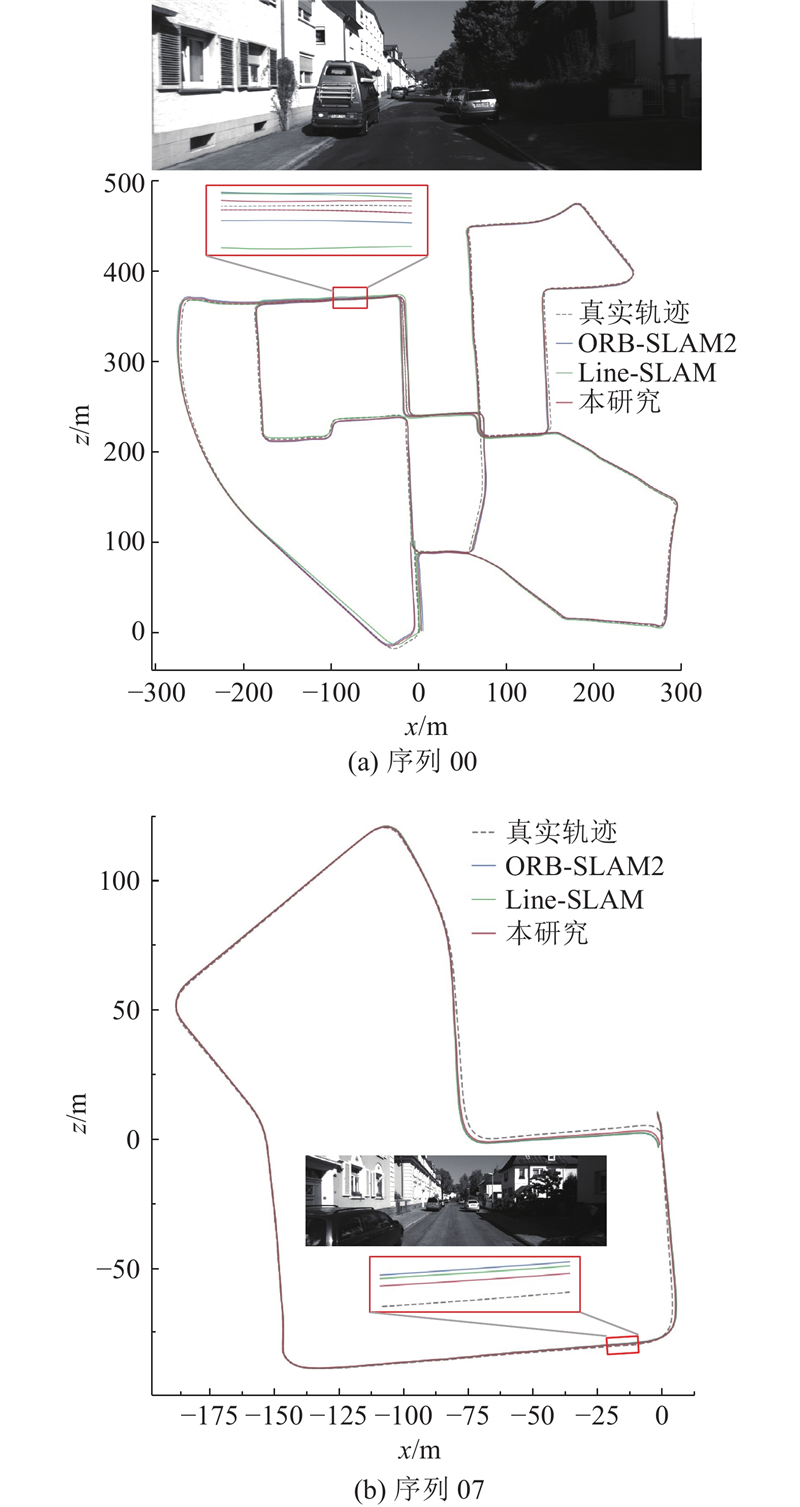
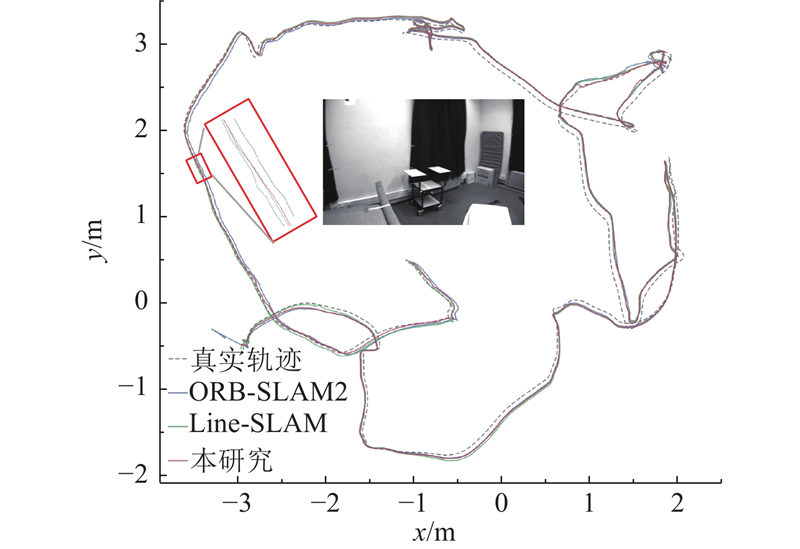
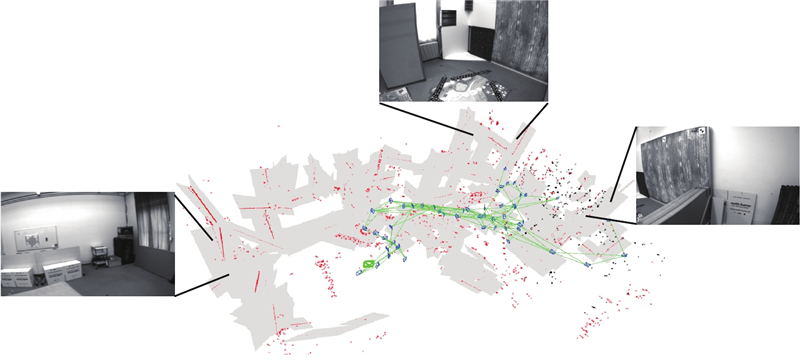
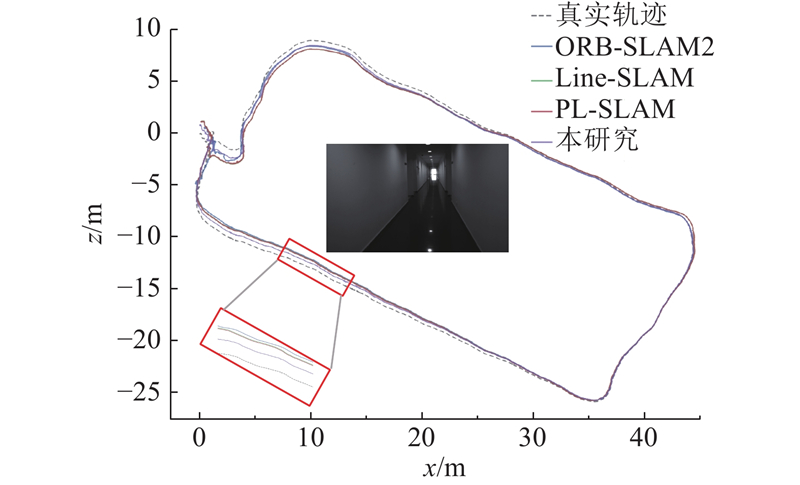
Abstract To address the issues of low positioning accuracy and significant trajectory drift errors in ORB-SLAM2 based on point features under low-texture scenes, a stereo visual SLAM algorithm integrating point, line, and plane features was proposed. An improved EDLines line feature extraction algorithm was designed and introduced into ORB-SLAM2. By employing short-line suppression and similar-line merging strategies, computational time was reduced while enhancing the quality of line feature extraction. A plane features extraction method based on intersecting lines was proposed. Geometric constraints derived from extracted plane features were used to optimize pose estimation, and reprojection errors were reduced. A joint optimization method for point, line, and plane features was introduced, integrating geometric relationships across multiple features to mitigate cumulative errors from single-feature reliance. The proposed algorithm’s effectiveness was validated on KITTI, EuRoC, and UMA-VI datasets. Experimental results demonstrate that compared to ORB-SLAM2, point-line feature-based SLAM, and point-plane feature-based SLAM algorithms, the proposed method achieves superior positioning accuracy and robustness.
|
|
Received: 15 February 2025
Published: 03 February 2026
|
|
|
| Fund: 国家自然科学基金资助项目(61702320);上海市晨光计划(15CG62). |
|
Corresponding Authors:
Lei RAO
E-mail: 949795713@qq.com;raol@sdju.edu.cn
|
低纹理环境下融合点线面特征的双目视觉SLAM算法
针对机器人在低纹理场景下基于点特征的ORB-SLAM2存在定位精度低、轨迹漂移误差较大的问题,提出融合点线面特征的双目视觉SLAM算法. 在ORB-SLAM2中设计并引入改进的EDLines线特征提取算法,通过短线抑制和相似直线合并策略,降低计算时间并提高线特征提取的质量. 提出基于相交直线的平面特征提取方法,基于所提取面特征的几何约束优化位姿估计,减少重投影误差. 提出点线面特征的联合优化方法,融合多种特征的几何关系,减少由单一特征带来的误差累积. 在KITTI、EuRoC和UMA-VI数据集下测试所提算法的有效性. 实验结果表明,相较于ORB-SLAM2、点线特征SLAM以及点面特征SLAM算法,所提算法在定位精度与鲁棒性方面更优.
关键词:
低纹理环境,
视觉SLAM,
线特征,
面特征,
联合优化
|
|
| [1] |
CADENA C, CARLONE L, CARRILO H, et al Past, present, and future of simultaneous localization and mapping: toward the robust-perception age[J]. IEEE Transactions on Robotics, 2016, 32 (6): 1309- 1332
doi: 10.1109/TRO.2016.2624754
|
|
|
| [2] |
TAKETOMI T, UCHIYAMA H, IKEDA S Visual SLAM algorithms: a survey from 2010 to 2016[J]. IPSJ Transactions on Computer Vision and Applications, 2017, 9: 16
doi: 10.1186/s41074-017-0027-2
|
|
|
| [3] |
ENGEL J, KOLTUN V, CREMERS D Direct sparse odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40 (3): 611- 625
doi: 10.1109/TPAMI.2017.2658577
|
|
|
| [4] |
MUR-ARTAL R, MONTIEL J, TARDÓS J ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31 (5): 1147- 1163
doi: 10.1109/TRO.2015.2463671
|
|
|
| [5] |
MUR-ARTAL R, TARDÓS J ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33 (5): 1255- 1262
doi: 10.1109/TRO.2017.2705103
|
|
|
| [6] |
CAMPOS C, ELVIRA R, RODRÍGUEZ J, et al ORB-SLAM3: an accurate open-source library for visual, visual–inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37 (6): 1874- 1890
doi: 10.1109/TRO.2021.3075644
|
|
|
| [7] |
WEI H, TANG F, XU Z, et al A point-line VIO system with novel feature hybrids and with novel line predicting-matching[J]. IEEE Robotics and Automation Letters, 2021, 6 (4): 8681- 8688
doi: 10.1109/LRA.2021.3113987
|
|
|
| [8] |
KAESS M. Simultaneous localization and mapping with infinite planes [C]// Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 4605–4611.
|
|
|
| [9] |
PUMAROLA A, VAKHITOV A, AGUDO A, et al. PL-SLAM: real-time monocular visual SLAM with points and lines [C]// Proceedings of the 2017 IEEE International Conference on Robotics and Automation. Singapore: IEEE, 2017: 4503–4508.
|
|
|
| [10] |
GIOI R, JAKUBOWICZ J, MOREL J, et al LSD: a fast line segment detector with a false detection control[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32 (4): 722- 732
doi: 10.1109/TPAMI.2008.300
|
|
|
| [11] |
QIAN K, ZHAO W, LI K, et al Visual SLAM with BoPLW pairs using egocentric stereo camera for wearable-assisted substation inspection[J]. IEEE Sensors Journal, 2020, 20 (3): 1630- 1641
doi: 10.1109/JSEN.2019.2947275
|
|
|
| [12] |
TREVOR A J B, GEDIKLI S, RUSU R B, et al Efficient organized point cloud segmentation with connected components[J]. Semantic Perception Mapping Exploration, 2013, 10 (6): 251- 257
|
|
|
| [13] |
MA L, KERL C, STÜCKLER J, et al. CPA-SLAM: consistent plane-model alignment for direct RGB-D SLAM [C]// Proceedings of the 2016 IEEE International Conference on Robotics and Automation. Stockholm: IEEE, 2016: 1285–1291.
|
|
|
| [14] |
ZHOU L, KOPPEL D, KAESS M Lidar SLAM with plane adjustment for indoor environment[J]. IEEE Robotics and Automation Letters, 2021, 6 (4): 7073- 7080
doi: 10.1109/LRA.2021.3092274
|
|
|
| [15] |
ZHANG X, WANG W, QI X, et al. Stereo plane SLAM based on intersecting lines [C]// Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems. Prague: IEEE, 2021: 6566–6572.
|
|
|
| [16] |
黄宁生, 陈靖, 缪远东 基于平面约束的RGB-D SLAM系统[J]. 计算机应用研究, 2020, 37 (8): 2526- 2530
HUANG Ningsheng, CHEN Jing, MIAO Yuandong RGB-D SLAM system based on plane constraint[J]. Application Research of Computers, 2020, 37 (8): 2526- 2530
doi: 10.19734/j.issn.1001-3695.2019.03.0100
|
|
|
| [17] |
ZHANG X, WANG W, QI X, et al Point-plane SLAM using supposed planes for indoor environments[J]. Sensors, 2019, 19 (17): 3795
doi: 10.3390/s19173795
|
|
|
| [18] |
WANG H, WEI H, XU Z, et al RSS: robust stereo SLAM with novel extraction and full exploitation of plane features[J]. IEEE Robotics and Automation Letters, 2024, 9 (6): 5158- 5165
doi: 10.1109/LRA.2024.3388854
|
|
|
| [19] |
YAN J, ZHENG Y, YANG J, et al PLPF-VSLAM: an indoor visual SLAM with adaptive fusion of point-line-plane features[J]. Journal of Field Robotics, 2024, 41 (1): 50- 67
doi: 10.1002/rob.22242
|
|
|
| [20] |
SHU F, WANG J, PAGANI A, et al. Structure PLP-SLAM: efficient sparse mapping and localization using point, line and plane for monocular, RGB-D and stereo cameras [C]// Proceedings of the 2023 IEEE International Conference on Robotics and Automation. London: IEEE, 2023: 2105–2112.
|
|
|
| [21] |
AKINLAR C, TOPAL C EDLines: a real-time line segment detector with a false detection control[J]. Pattern Recognition Letters, 2011, 32 (13): 1633- 1642
doi: 10.1016/j.patrec.2011.06.001
|
|
|
| [22] |
ZHANG L, KOCH R An efficient and robust line segment matching approach based on LBD descriptor and pairwise geometric consistency[J]. Journal of Visual Communication and Image Representation, 2013, 24 (7): 794- 805
doi: 10.1016/j.jvcir.2013.05.006
|
|
|
| [23] |
BURRI M, NIKOLIC J, GOHL P, et al The EuRoC micro aerial vehicle datasets[J]. International Journal of Robotics Research, 2016, 35 (10): 1157- 1163
doi: 10.1177/0278364915620033
|
|
|
| [24] |
GEIGER A, LENZ P, STILLER C, et al Vision meets robotics: the KITTI dataset[J]. International Journal of Robotics Research, 2013, 32 (11): 1231- 1237
doi: 10.1177/0278364913491297
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|