|
|
|
| Spraying trajectory optimization for redundant robots based on improved particle swarm algorithm |
Yipeng ZHONG1,2( ),Jianjun SHA1,2,*(),Yifei ZHANG1,2,Wenlong YANG1,2,Ting YIN1,2,Xianglong MA1,2 ),Jianjun SHA1,2,*(),Yifei ZHANG1,2,Wenlong YANG1,2,Ting YIN1,2,Xianglong MA1,2 |
1. College of Intelligent Systems Science and Engineering, Harbin Engineering University, Harbin 150001, China
2. Qingdao Innovation Development Base, Harbin Engineering University, Qingdao 266000, China |
|
|
|
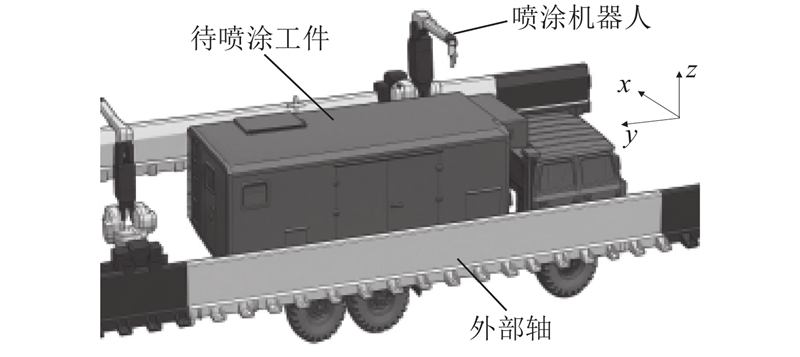
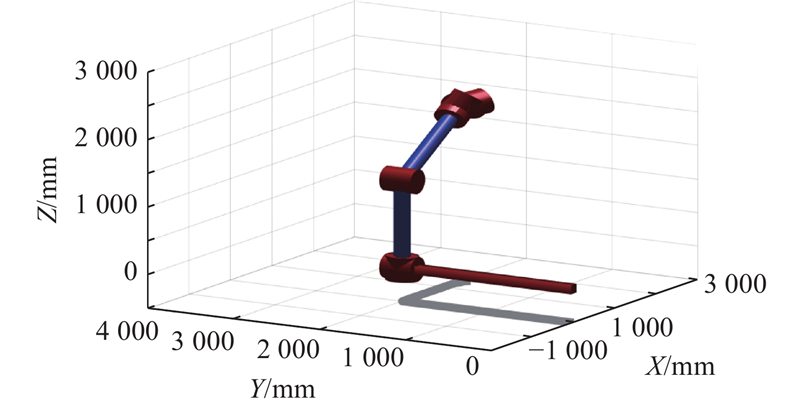
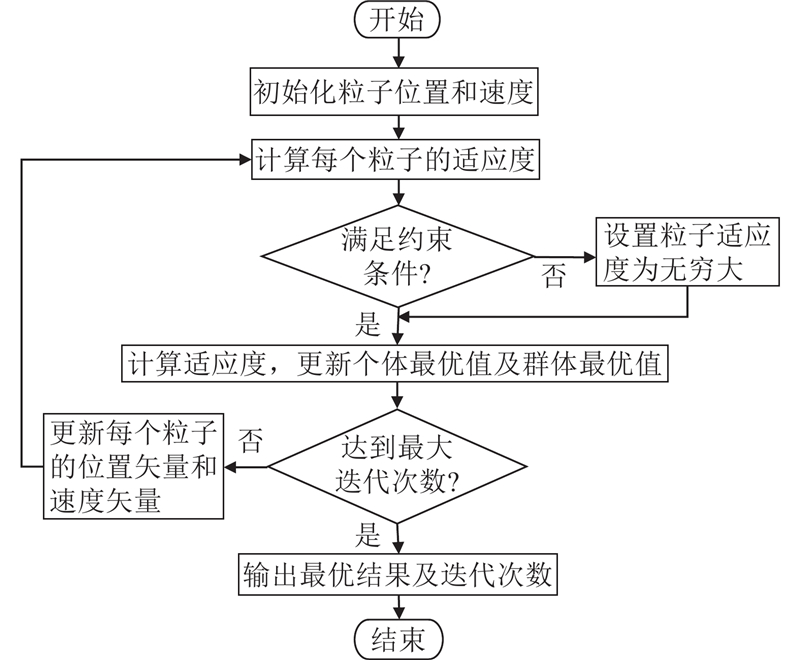
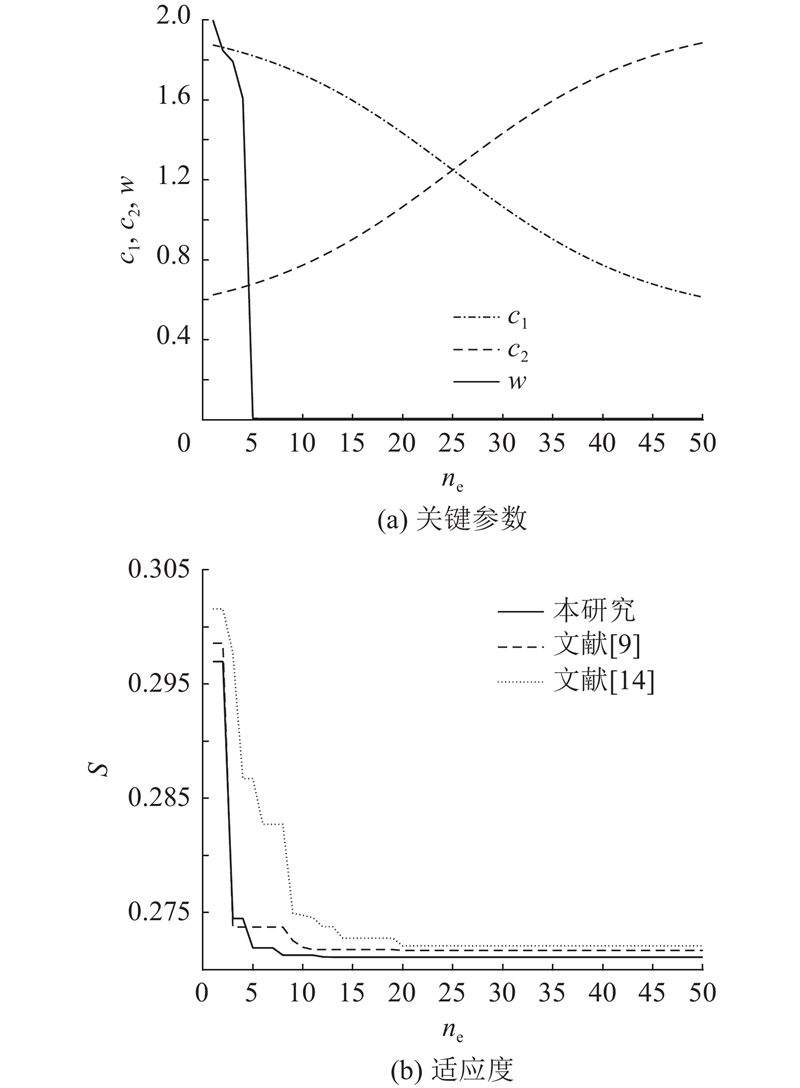
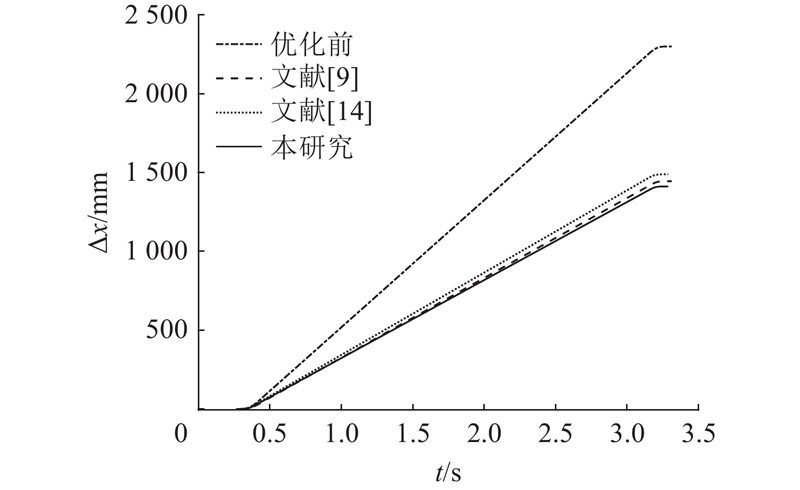
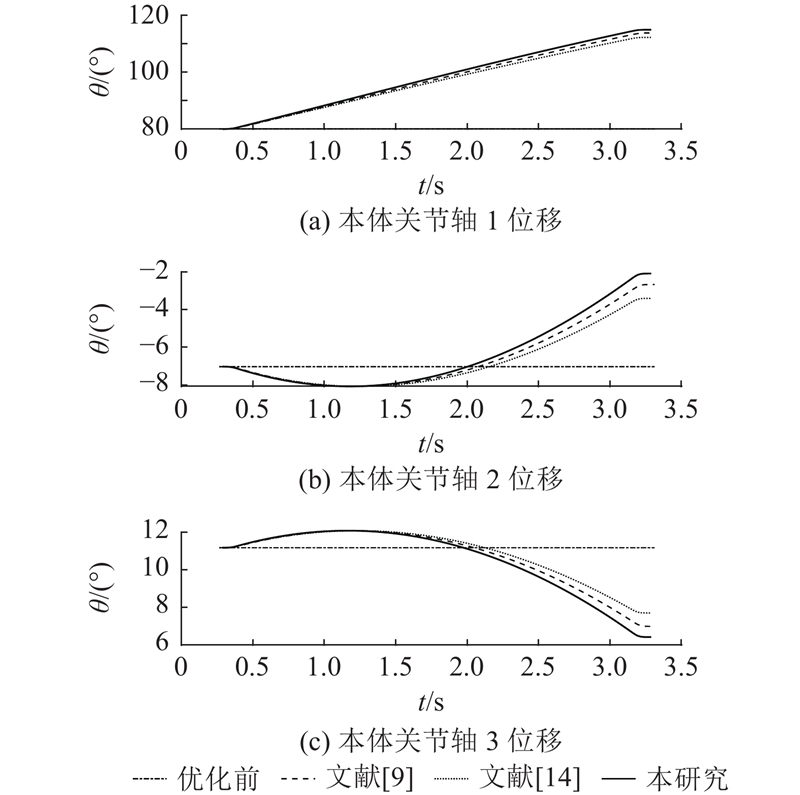
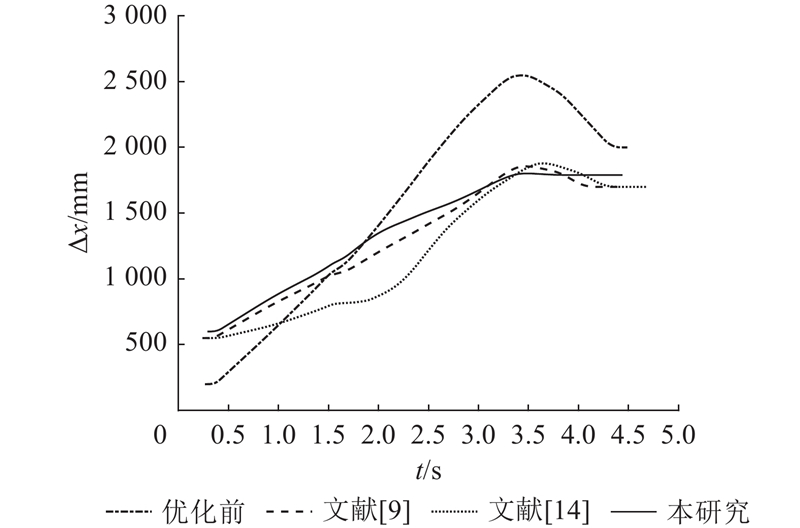
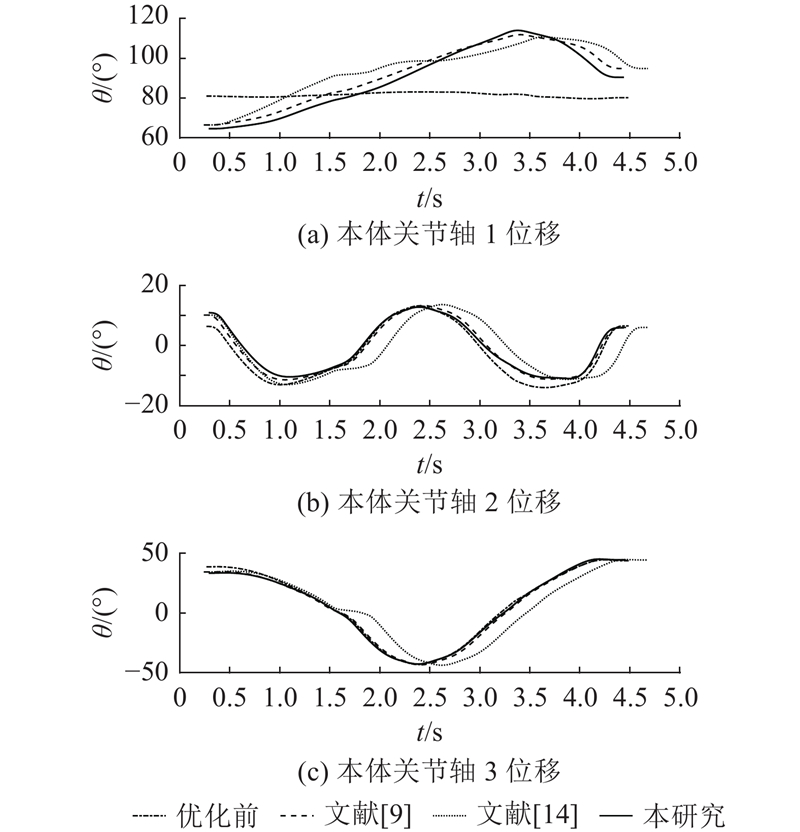
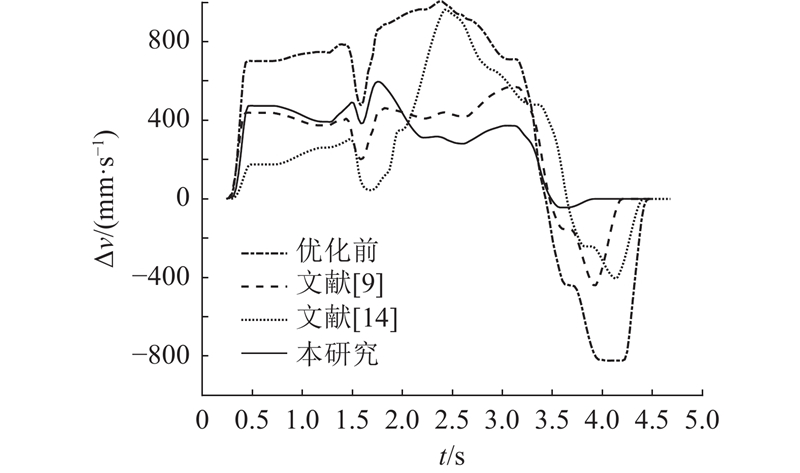
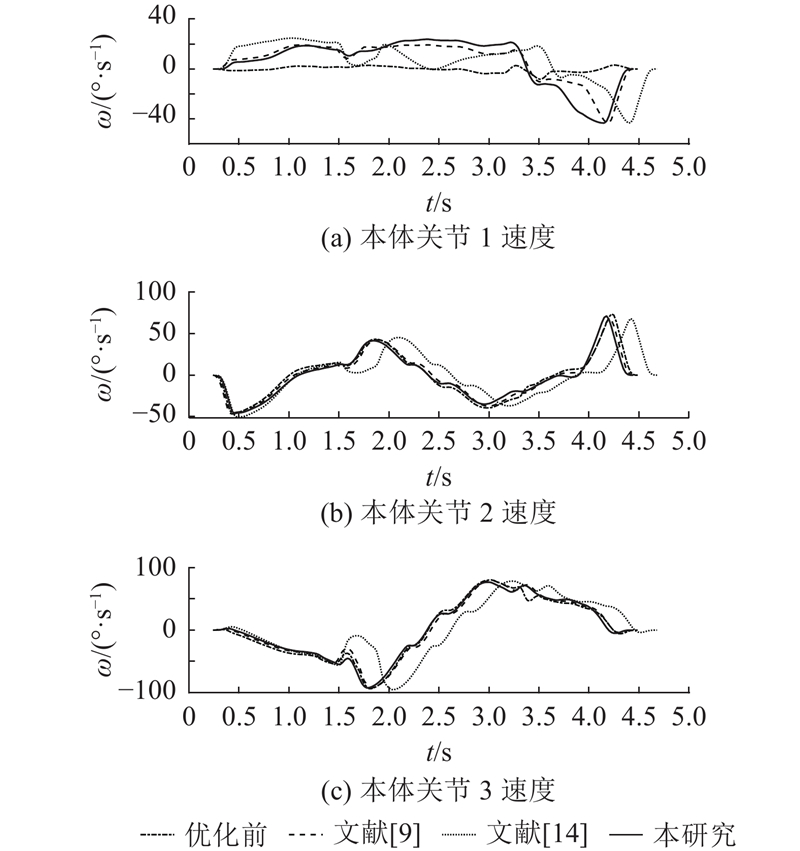
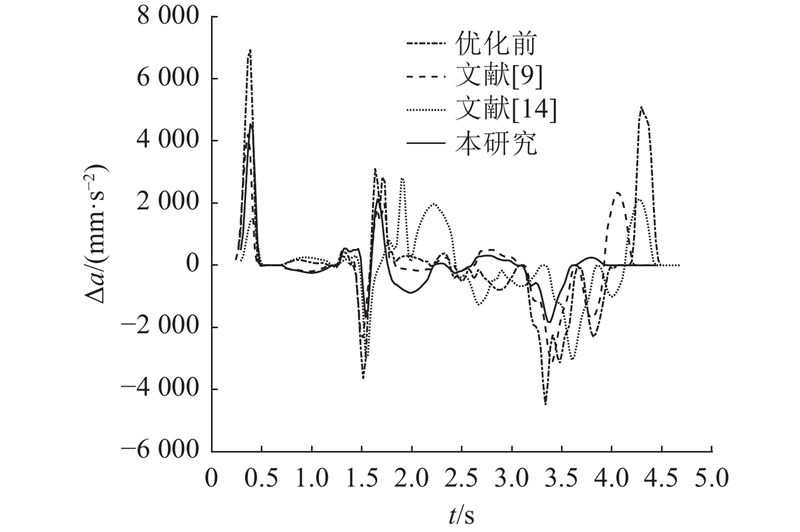
Abstract A new spraying trajectory optimization method was proposed to eliminate the unsmooth trajectory and joint impact that occurred when a redundant robot exhibited poor point-coupling performance during the automatic spraying of large parts. A redundant robot model was established, and an inverse kinematics solution was obtained by combining an inverse solution of stationary localization and the damped least squares method. An improved particle swarm algorithm was used to optimize the trajectory of the redundant robot’s external axes, the adaptive inertia weights and nonlinear learning factors were introduced to enhance the algorithm’s searching ability, and to increase the solving accuracy and optimization search speed of the algorithm. In simulation, the improved particle swarm algorithm scheme was compared with the original trajectory and with those generated by the GA-PSO algorithm and by the improved simulated annealing genetic algorithm. For the linear spraying task, it cut overall energy loss by 35.4%, 1.3% and 2.8%, and reduced the amplitude of the external axis motion by 32.6%, 0.4% and 2.3%, respectively. The corresponding reductions for the curved spraying task were 26.8%, 2.8% and 7.3% in energy, and 58.7%, 17.8% and 21.0% in axis motion.
|
|
Received: 07 February 2025
Published: 03 February 2026
|
|
|
| Fund: 装备研制项目(GQZ2023004133). |
|
Corresponding Authors:
Jianjun SHA
E-mail: zyp_06@hrbeu.edu.cn;shajianjun_hh@163.com
|
基于改进粒子群算法的冗余机器人喷涂轨迹优化
针对大型部件自动喷涂过程中冗余机器人耦合度低造成的轨迹不平滑、关节冲击问题,提出新的喷涂轨迹优化方法. 建立冗余机器人模型,结合分站式定位逆解和阻尼最小二乘法求逆运动学解. 采用改进粒子群算法优化冗余机器人外部轴轨迹,引入自适应惯性权重和非线性学习因子,增强算法搜索能力,提高算法的求解精度与寻优速度. 仿真实验表明,与原轨迹、GA-PSO算法优化后的轨迹和改进模拟退火遗传算法优化后的轨迹相比,采用改进粒子群算法优化后,机器人在直线喷涂任务中整体能量损耗分别降低了35.4%、1.3%和2.8%,外部轴运动幅度分别降低了32.6%、0.4%和2.3%;在曲线喷涂任务中整体能量损耗分别降低了26.8%、2.8%和7.3%,外部轴运动幅度分别降低了58.7%、17.8%和21.0%.
关键词:
冗余机器人,
机器人喷涂,
轨迹优化,
阻尼最小二乘法,
粒子群算法
|
|
| [1] |
曾勇, 陈洪博, 赵雪雅, 等 喷涂机器人风机叶片分片喷涂轨迹优化[J]. 机床与液压, 2024, 52 (21): 64- 70
ZENG Yong, CHEN Hongbo, ZHAO Xueya, et al Spraying robot trajectory optimization for fan blade fragment[J]. Machine Tool and Hydraulics, 2024, 52 (21): 64- 70
|
|
|
| [2] |
曹仁俊. 喷涂机器人工作站的研究与实现 [D]. 芜湖: 安徽工程大学, 2019: 1–81.
CAO Renjun. Research and implementation of painting robot workstation [D]. Wuhu: Anhui Polytechnic University, 2019: 1–81.
|
|
|
| [3] |
GLEESON D, JAKOBSSON S, SALMAN R, et al Generating optimized trajectories for robotic spray painting[J]. IEEE Transactions on Automation Science and Engineering, 2022, 19 (3): 1380- 1391
doi: 10.1109/TASE.2022.3156803
|
|
|
| [4] |
王旭浩. 7R 6-DOF型喷涂机器人设计及关键技术研究 [D]. 天津: 天津大学, 2019: 1–145.
WANG Xuhao. Investigation on design and key issues for 7R 6-DOF painting robot [D]. Tianjin: Tianjin University, 2019: 1–145.
|
|
|
| [5] |
李旭宇, 吴献智 串联六轴机械臂逆运动学几何解法[J]. 长沙理工大学学报: 自然科学版, 2024, 21 (2): 84- 91
LI Xuyu, WU Xianzhi Inverse kinematics of geometric algorithm of series six-axis manipulator[J]. Journal of Changsha University of Science and Technology: Natural Science, 2024, 21 (2): 84- 91
|
|
|
| [6] |
万珍平, 罗钊, 陆龙生, 等 关节角参数化结合接近矢量可行方向的五自由度机械臂逆运动学求解[J]. 华南理工大学学报: 自然科学版, 2023, 51 (1): 16- 21
WAN Zhenping, LUO Zhao, LU Longsheng, et al Inverse kinematics solution of 5-DOF manipulator via joint angle parameterization and feasible direction of approach vector[J]. Journal of South China University of Technology: Natural Science Edition, 2023, 51 (1): 16- 21
|
|
|
| [7] |
ZAPLANA I, BASANEZ L A novel closed-form solution for the inverse kinematics of redundant manipulators through workspace analysis[J]. Mechanism and Machine Theory, 2018, 121: 829- 843
doi: 10.1016/j.mechmachtheory.2017.12.005
|
|
|
| [8] |
王成军, 姚星宇, 杨林, 等 基于A*算法与组合函数的分拣机械臂轨迹规划[J]. 组合机床与自动化加工技术, 2023, (12): 25- 29
WANG Chengjun, YAO Xingyu, YANG Lin, et al Sorting robotic arm trajectory planning based on A* algorithm and combination function[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2023, (12): 25- 29
|
|
|
| [9] |
YAO R, WANG J, LV Y, et al. The time-impact optimal trajectory planning for multi-joint robot based on GA-PSO [C]// Proceedings of the 4th International Conference on Computer, Control and Robotics. Shanghai: IEEE, 2024: 284–288.
|
|
|
| [10] |
ZHENG Z, JIANG D, XIONG H, et al Trajectory planning algorithm and simulation of 6-DOF manipulator[J]. International Journal of Wireless and Mobile Computing, 2018, 14 (2): 138
doi: 10.1504/IJWMC.2018.091140
|
|
|
| [11] |
郑雪芳, 林意 基于改进萤火虫算法的冗余机器人轨迹规划[J]. 组合机床与自动化加工技术, 2019, (12): 80- 84
ZHENG Xuefang, LIN Yi Trajectory planning for redundant robot based on improved glowworm swarm optimization algorithm[J]. Modular Machine Tool and Automatic Manufacturing Technique, 2019, (12): 80- 84
|
|
|
| [12] |
孔令竹 基于灰狼优化算法的机械臂避障轨迹规划[J]. 机械工程与自动化, 2024, (1): 29- 32
KONG Lingzhu Obstacle-avoidance trajectory planning of manipulator based on grey wolf optimization algorithm[J]. Mechanical Engineering and Automation, 2024, (1): 29- 32
|
|
|
| [13] |
李甚霖, 曾庆生, 冯栋彦, 等 基于萤火虫-遗传算法的机械臂轨迹时间优化[J]. 机械工程师, 2024, (2): 62- 66
LI Shenlin, ZENG Qingsheng, FENG Dongyan, et al Time optimization of manipulator trajectory based on firefly-genetic algorithm[J]. Mechanical Engineer, 2024, (2): 62- 66
|
|
|
| [14] |
徐强, 徐坚磊, 胡燕海, 等 基于改进模拟退火遗传算法的机械臂轨迹优化[J]. 系统仿真学报, 2025, 37 (2): 404- 412
XU Qiang, XU Jianlei, HU Yanhai, et al Trajectory optimization of robotic arm based on improved simulated annealing genetic algorithm[J]. Journal of System Simulation, 2025, 37 (2): 404- 412
|
|
|
| [15] |
BAI J, LI J, WANG M. An efficient artificial bee colony algorithm for analytical inverse kinematics of redundant manipulator [C]// Proceedings of the 7th International Conference on Intelligent Robotics and Control Engineering. Xi’an: IEEE, 2024: 117–123.
|
|
|
| [16] |
周承仙, 富巍 串联机器人运动学分析与研究[J]. 中北大学学报: 自然科学版, 2016, 37 (5): 522- 529
ZHOU Chengxian, FU Wei Kinematic analysis and research of serial robot[J]. Journal of North University of China: Natural Science Edition, 2016, 37 (5): 522- 529
|
|
|
| [17] |
蒋新松. 机器人与工业自动化 [M]. 石家庄: 河北教育出版社, 2003: 34–35.
|
|
|
| [18] |
王润. 串联机器人运动学分析、结构优化设计及仿真研究 [D]. 天津: 天津大学, 2012: 1–64.
WANG Run. Research on the kinematics analysis, structural optimizationg design and simulation of serial robot [D]. Tianjin: Tianjin University, 2012: 1–64.
|
|
|
| [19] |
田威, 戴家隆, 周卫雪, 等 附加外部轴的工业机器人自动钻铆系统分站式任务规划与控制技术[J]. 中国机械工程, 2014, 25 (1): 23- 27
TIAN Wei, DAI Jialong, ZHOU Weixue, et al Process planning and control technology on multi-station working mode of robot drilling and riveting system with auxiliary axis[J]. China Mechanical Engineering, 2014, 25 (1): 23- 27
|
|
|
| [20] |
WANG X, ZHANG D, ZHAO C Inverse kinematics of a 7R 6-DOF robot with nonspherical wrist based on transformation into the 6R robot[J]. Mathematical Problems in Engineering, 2017, 2017: 2074137
doi: 10.1155/2017/2074137
|
|
|
| [21] |
CHIAVERINI S, SICILIANO B, EGELAND O Review of the damped least-squares inverse kinematics with experiments on an industrial robot manipulator[J]. IEEE Transactions on Control Systems Technology, 1994, 2 (2): 123- 134
doi: 10.1109/87.294335
|
|
|
| [22] |
马斌, 吴泽忠 基于改进的粒子群算法求解供应链网络均衡问题[J]. 运筹与管理, 2020, 29 (2): 122- 128
MA Bin, WU Zezhong Research on supply chain network equilibrium model based on improved particle swarm optimization[J]. Operations Research and Management Science, 2020, 29 (2): 122- 128
|
|
|
| [23] |
胡渊. 基于粒子群算法的Dobot机械臂时间最优抓放轨迹规划研究 [D]. 重庆: 重庆大学, 2021: 1–71.
HU Yuan. Particle swarm optimization based time optimal pick-place trajectory planning in a Dobot manipulator [D]. Chongqing: Chongqing University, 2021: 1–71.
|
|
|
| [24] |
王延年, 向秋丽 基于改进粒子群优化算法的六自由度机器人轨迹优化算法[J]. 国外电子测量技术, 2020, 39 (1): 49- 53
WANG Yannian, XIANG Qiuli Trajectory of 6-DOF robot based on improved particle swarm optimization algorithm[J]. Foreign Electronic Measurement Technology, 2020, 39 (1): 49- 53
|
|
|
| [25] |
ZHONG Y, SONG L, SHA J, et al. Modeling of coating growth rate for digital camouflage robotic spraying based on elliptic double $ \beta $ models [C]// Proceedings of the 10th International Conference on Electrical Engineering, Control and Robotics. Guangzhou: IEEE, 2024: 63–68.
|
|
|
| [26] |
张公韬. 装备迷彩喷涂机器人路径规划方法研究 [D]. 哈尔滨: 哈尔滨工程大学, 2021: 1–92.
ZHANG Gongtao. Research on path planning method for the equipment camouflage painting robot [D]. Harbin: Harbin Engineering University, 2021: 1–92.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|