|
|
|
| Hybrid shuffled frog leaping algorithm for solving vehicle-dronecooperative delivery problem |
Haohao DUAN( ),Xiaoling LI*(),Qingchang LU,Shan LIN ),Xiaoling LI*(),Qingchang LU,Shan LIN |
| School of Electronics and Control Engineering, Chang’an University, Xi’an 710064, China |
|
|
|
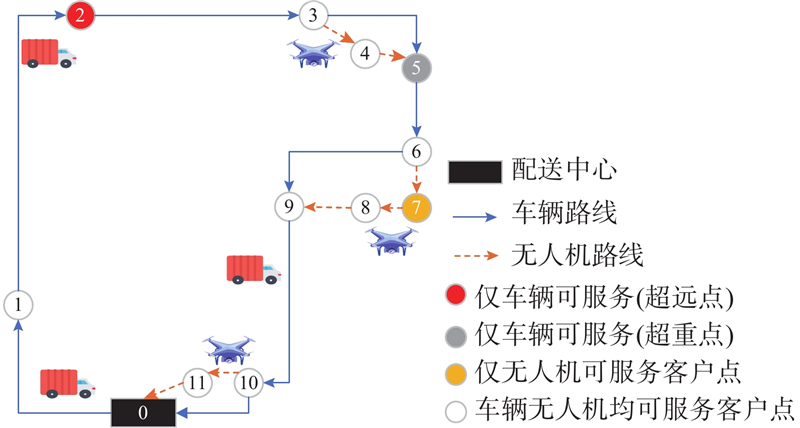
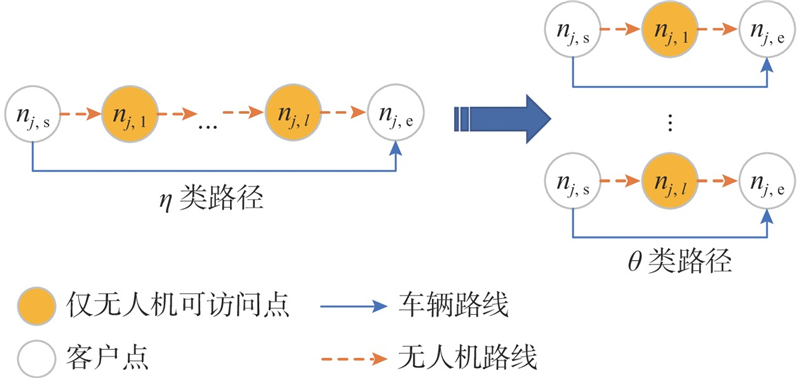
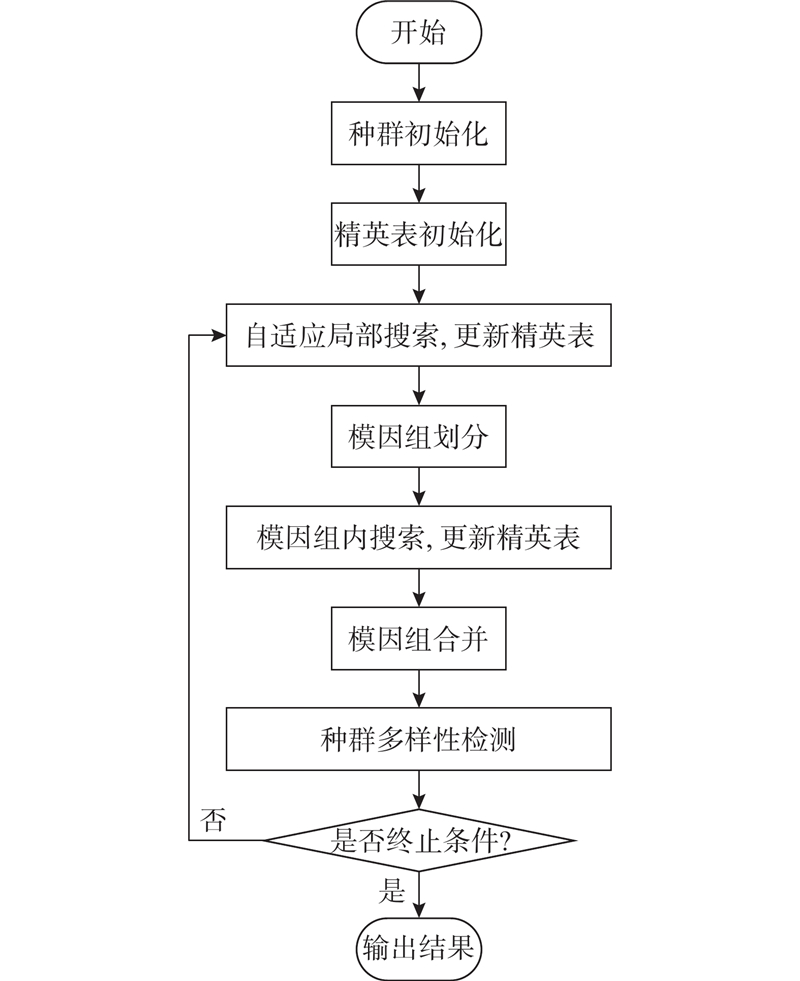
Abstract The vehicle-drone cooperative delivery problem was analyzed where a drone could service multiple customers after takeoff in order to fully utilize the respective advantages of drones and vehicles. The considered constraints include regional restrictions for vehicles and delivery range limitations due to the loading and endurance capabilities of the drone. A mathematical model of the problem was established to minimize the total delivery time, and a hybrid shuffled frog leaping algorithm (HSFLA) was proposed to solve it aiming at the multi-drop vehicle-drone cooperative problem with delivery restrictions (MDVCP-DR). A novel encoding and pre-adjusted decoding method was proposed to obtain feasible solutions so that the constraints involved in the problem can be satisfied. Then an individual generation method was developed to update individuals in the population based on four crossover operators and an elite list. An adaptive local search strategy was imbedded into the algorithm in order to enhance the local exploitation ability of HSFLA. A population diversity detection strategy was used to ensure the diversity of individuals in the population. Simulation experiments demonstrated the accuracy of the established mathematical model and the effectiveness of HSFLA.
|
|
Received: 08 October 2023
Published: 23 October 2024
|
|
|
| Fund: 国家自然科学基金资助项目(62103062, 71971029);长安大学中央高校基本科研业务费专项资金资助项目(300102322101). |
|
Corresponding Authors:
Xiaoling LI
E-mail: 2022132066@chd.edu.cn;xiaolingli@chd.edu.cn
|
混合蛙跳算法求解车辆无人机协同配送问题
为了充分发挥无人机与车辆各自的优势,研究无人机起飞后可服务多个客户的车辆-无人机协同配送问题,其中考虑了车辆因区域限制、无人机因载重和续航限制导致2类运输工具配送范围均受到限制的约束. 针对这类运输工具配送受限的车辆-多投递无人机协同配送问题(MDVCP-DR),以最小化总配送时间为优化目标,建立对应的数学模型,提出混合蛙跳算法(HSFLA)进行求解. 提出新的编码与预调整解码方法,得到满足各种约束的可行解. 建立基于4种交叉算子和精英表的个体生成方法,更新种群中的个体. 设计自适应局部搜索策略来增强算法的局部开发能力,通过种群多样性检测策略来保证个体的多样性. 通过仿真实验,验证了建立的数学模型的正确性和HSFLA的有效性.
关键词:
车辆-无人机,
协同配送,
配送限制,
蛙跳算法,
路径优化
|
|
| [1] |
MURRAY C C, CHU A G The flying sidekick traveling salesman problem: optimization of drone-assisted parcel delivery[J]. Transportation Research Part C: Emerging Technologies, 2015, 54: 86- 109
doi: 10.1016/j.trc.2015.03.005
|
|
|
| [2] |
GRIFFITH E F, SCHURER J M, MAWINDO B, et al The use of drones to deliver rift valley fever vaccines in rwanda: perceptions and recommendations[J]. Vaccines, 2023, 11 (3): 605
doi: 10.3390/vaccines11030605
|
|
|
| [3] |
WEN X P, WU G H Heterogeneous multi-drone routing problem for parcel delivery[J]. Transportation Research Part C: Emerging Technologies, 2022, 141: 103763
doi: 10.1016/j.trc.2022.103763
|
|
|
| [4] |
AGATZ N, BOUMAN P, SCHMIDT M Optimization approaches for the traveling salesman problem with drone[J]. Transportation Science, 2018, 52 (4): 965- 981
doi: 10.1287/trsc.2017.0791
|
|
|
| [5] |
GONZALEZ-R P L, CANCA D, ANDRADE-PINEDA J L, et al Truck-drone team logistics: a heuristic approach to multi-drop route planning[J]. Transportation Research Part C: Emerging Technologies, 2020, 114: 657- 680
doi: 10.1016/j.trc.2020.02.030
|
|
|
| [6] |
柳伍生, 李旺, 周清, 等 “无人机-车辆”配送路径优化模型与算法[J]. 交通运输系统工程与信息, 2021, 21 (6): 176- 186
LIU Wusheng, LI Wang, ZHOU Qing, et al “Drone-Vehicle” distribution routing optimization model[J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21 (6): 176- 186
|
|
|
| [7] |
LUO Z H, POON M, ZHANG Z Z, et al The multi-visit traveling salesman problem with multi-drones[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103172
doi: 10.1016/j.trc.2021.103172
|
|
|
| [8] |
伍国华, 毛妮, 徐彬杰, 等 基于自适应大规模邻域搜索算法的多车辆与多无人机协同配送方法[J]. 控制与决策, 2023, 38 (1): 201- 210
WU Guohua, MAO Ni, XU Binjie, et al The cooperative delivery of multiple vehicles and multiple drones based on adaptive large neighborhood search[J]. Control and Decision, 2023, 38 (1): 201- 210
|
|
|
| [9] |
GU R X, POON M, LUO Z H, et al A hierarchical solution evaluation method and a hybrid algorithm for the vehicle routing problem with drones and multiple visits[J]. Transportation Research Part C: Emerging Technologies, 2022, 141: 103733
doi: 10.1016/j.trc.2022.103733
|
|
|
| [10] |
MARA S T W, RIFAI A P, SOPHA B M An adaptive large neighborhood search heuristic for the flying sidekick traveling salesman problem with multiple drops[J]. Expert Systems with Applications, 2022, 205: 117647
doi: 10.1016/j.eswa.2022.117647
|
|
|
| [11] |
杜茂康, 罗娟, 李博文 基于多车场的车载无人机协同配送路径优化[J]. 系统工程, 2021, 39 (6): 90- 98
DU Maokang, LUO Juan, LI Bowen Research on cooperative delivery route optimization of vehicle-carried drones based on multi-depot[J]. Systems Engineering, 2021, 39 (6): 90- 98
|
|
|
| [12] |
范厚明, 张跃光, 田攀俊 时变路网下多中心电动车-无人机协同配送路径优化[J]. 管理工程学报, 2023, 37 (2): 131- 142
FAN Houming, ZHANG Yueguang, TIAN Panjun Multi-depot electric vehicle routing problem with drones under time-dependent networks[J]. Journal of Industrial Engineering and Engineering Management, 2023, 37 (2): 131- 142
|
|
|
| [13] |
吴廷映, 陶新月, 孟婷 “卡车+无人机”模式下带时间窗的取送货车辆路径问题[J]. 计算机集成制造系统, 2023, 29 (7): 2440- 2448
WU Tingying, TAO Xinyue, MENG Ting Pickup and delivery problem with time windows in mode of “truck +drone”[J]. Computer Integrated Manufacturing Systems, 2023, 29 (7): 2440- 2448
|
|
|
| [14] |
DAS D N, SEWANI R, WANG J W, et al Synchronized truck and drone routing in package delivery logistics[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22 (9): 5772- 5782
|
|
|
| [15] |
KUO R J, LU S H, LAI P Y, et al Vehicle routing problem with drones considering time windows[J]. Expert Systems with Applications, 2022, 191: 116264
doi: 10.1016/j.eswa.2021.116264
|
|
|
| [16] |
LUO Q Z, WU G H, JI B, et al Hybrid multi-objective optimization approach with pareto local search for collaborative truck-drone routing problems considering flexible time windows[J]. IEEE Transactions on Intelligent Transportation Systems, 2021, 23 (8): 13011- 13025
|
|
|
| [17] |
彭勇, 黎元钧 考虑疫情影响的卡车无人机协同配送路径优化[J]. 中国公路学报, 2020, 33 (11): 73- 82
PENG Yong, LI Yuanjun Optimization of truck-drone collaborative distribution route considering impact of epidemic[J]. China Journal of Highway and Transport, 2020, 33 (11): 73- 82
|
|
|
| [18] |
颜瑞, 陈立双, 朱晓宁, 等 考虑区域限制的卡车搭载无人机车辆路径问题研究[J]. 中国管理科学, 2022, 30 (5): 144- 155
YAN Rui, CHEN Lishuang, ZHU Xiaoning, et al Research on vehicle routing problem with truck and drone considering regional restriction[J]. Chinese Journal of Management Science, 2022, 30 (5): 144- 155
|
|
|
| [19] |
EUSUFF M, LANSEY K, PASHA F Shuffled frog-leaping algorithm: a memetic meta-heuristic for discrete optimization[J]. Engineering Optimization, 2006, 38 (2): 129- 154
doi: 10.1080/03052150500384759
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|