|
|
|
| Human-robot matching design of self-aligning artificial knee joint |
Tong-li CHANG( ),Wan-bin FU() ),Wan-bin FU() |
| School of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China |
|
|
|
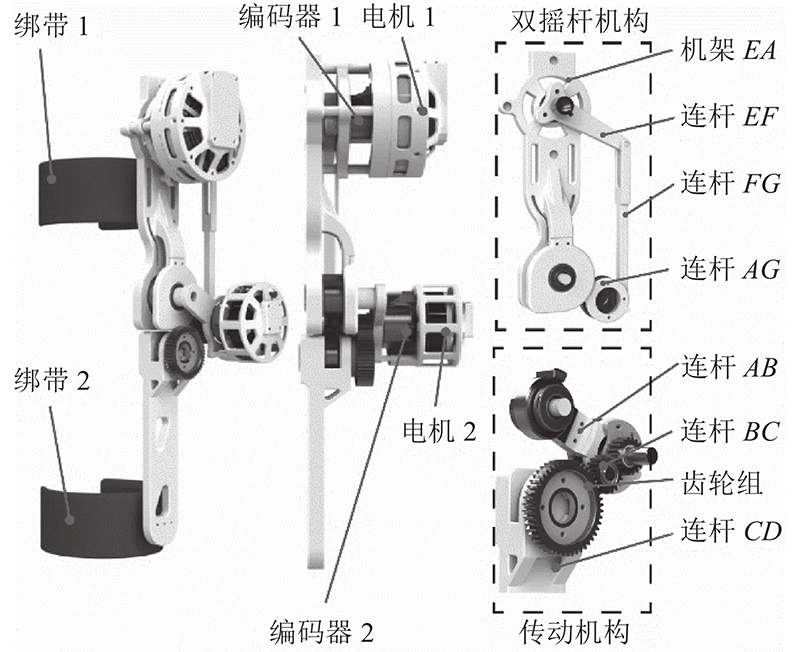
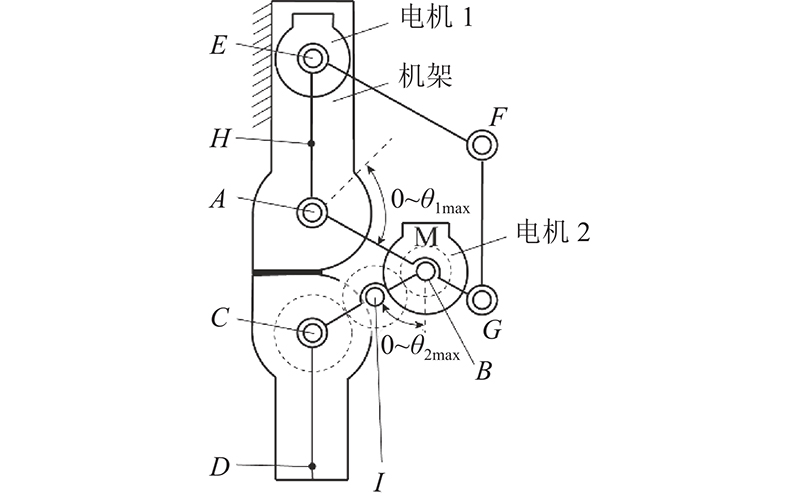
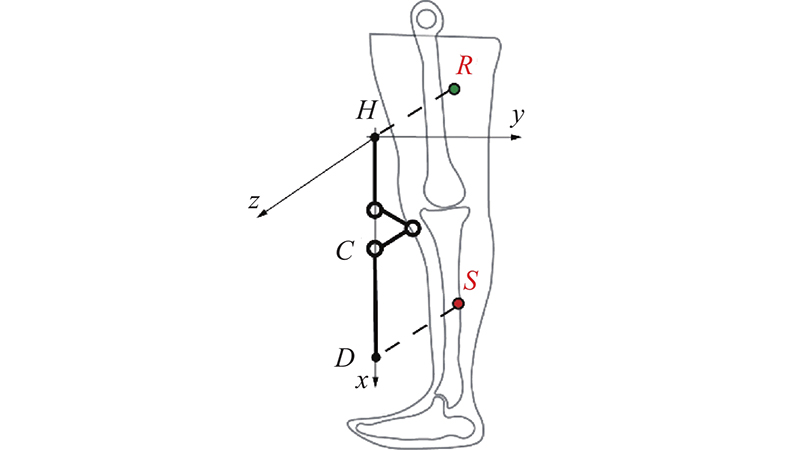
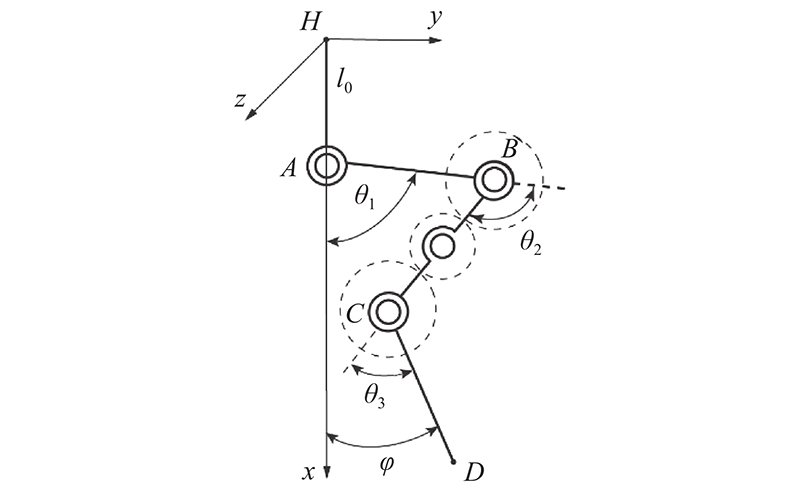
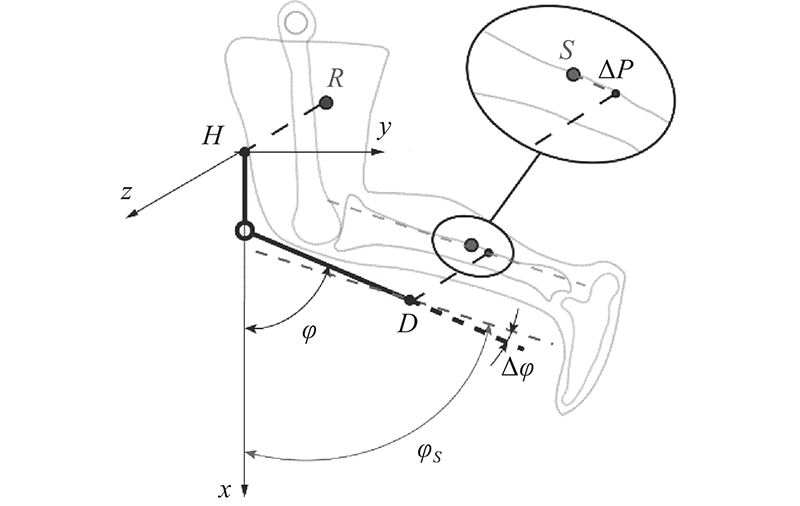
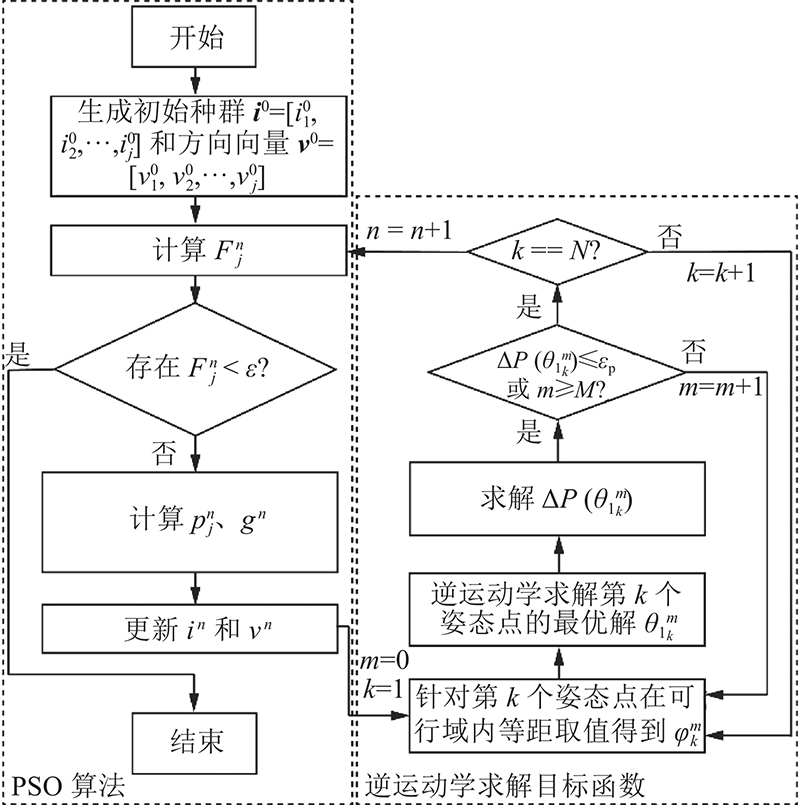
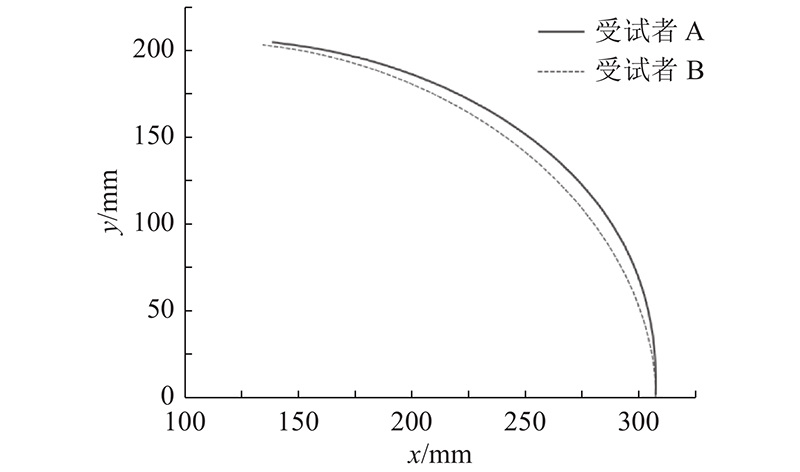
Abstract A self-aligning artificial knee mechanism with two degrees of freedom was presented aiming at the problem of human-robot system misalignment at the knee joint. The mechanism was driven by two motors to simulate the flexion and extension movements of the biological knee joint. A kinematic model of human-robot coupling was established to quantify the misalignment as the deviation of the swing angle and position of the mechanism’s connecting point from the reference point of the calf. A particle swarm optimization (PSO)-based end-matching method for human-robot systems was proposed in order to reduce deviations and optimize the parameter of the key component. The swing angle of the artificial knee joint approaches the knee flexion and extension angle in the process of the bandage point approaching the reference point. A group of high-speed cameras was used to measure the movement data of individual lower leg, and the human-robot matching operation was conducted with the results as a reference. A digital virtual prototype was developed to conduct simulation experiments. The matching effect of the artificial knee joint and individual calf motion was verified through a joint simulation of MATLAB-Adams. Results show that the artificial knee joint can achieve motion matching and self-alignment of the swing angle.
|
|
Received: 26 April 2022
Published: 21 April 2023
|
|
|
| Fund: 黑龙江省工信委资助项目(GXW2010080);黑龙江省教育厅课题资助项目(11553020) |
自对准人工膝关节的人机匹配设计
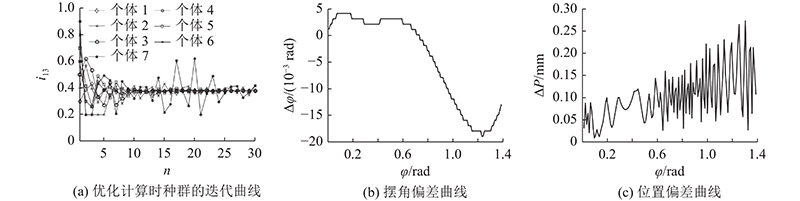
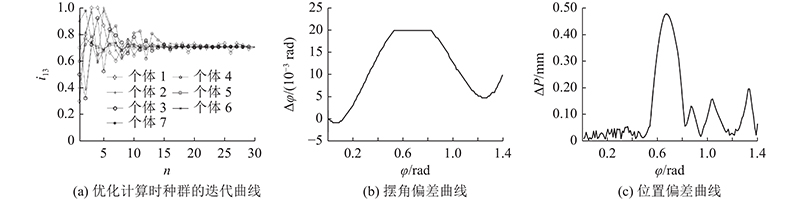
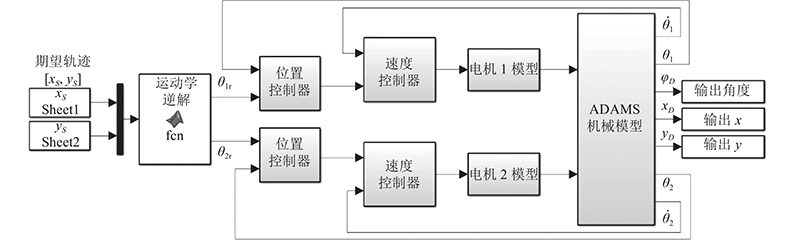
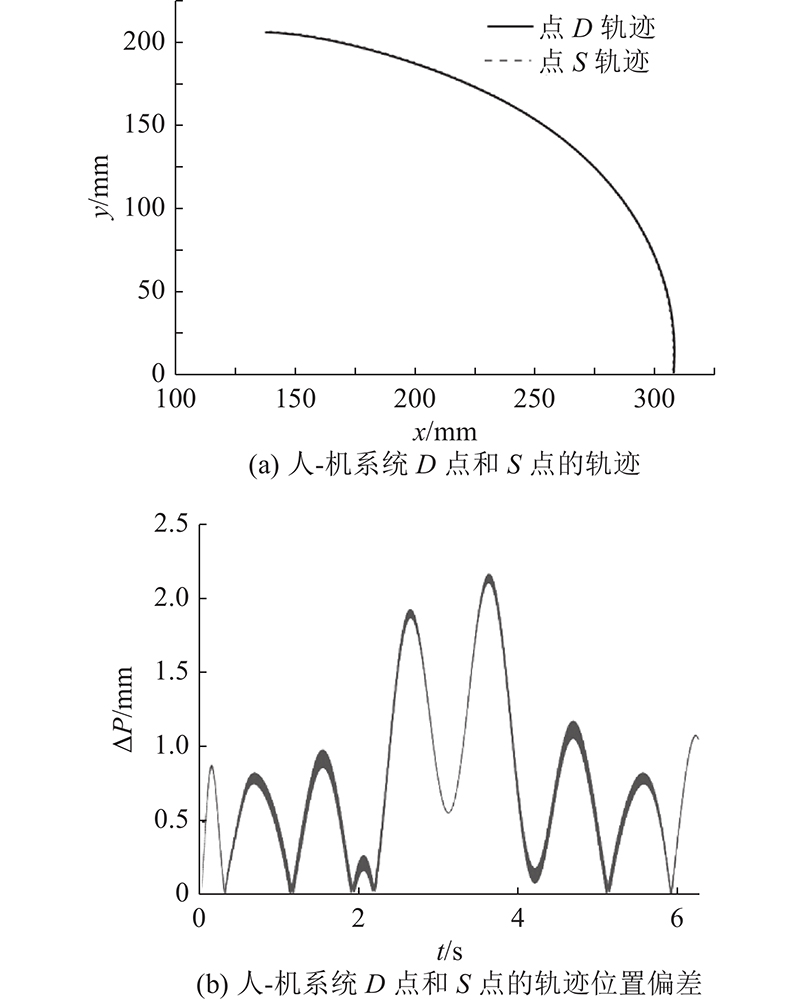
针对膝关节处人-机系统错位的问题,提出两自由度自对准人工膝关节机构. 为了模拟生物膝关节的屈伸运动,该装置采用2个电机对自对准人工膝关节进行驱动. 对机构进行运动学分析,建立人-机耦合的运动学模型,将人工膝关节与生物膝关节间的错位定量地描述为机构绑带点与小腿参照点的摆角偏差和位置偏差. 以缩小偏差为目标,提出基于粒子群优化的人-机系统运动匹配方法优化关键部件参数,在绑带点趋近参照点的过程中,人工膝关节摆角趋近小腿屈伸角度. 采用高速相机测量个体小腿的运动数据,以测量结果为参考进行人机匹配操作. 建立数字虚拟样机,开展仿真实验. 通过MATLAB-Adams联合仿真,对动态过程中人工膝关节与个体小腿运动的匹配效果进行验证. 结果表明,该人工膝关节在其工作空间内可以实现运动匹配与摆角自对准.
关键词:
人工膝关节,
人-机系统错位,
粒子群优化(PSO),
数字虚拟样机
|
|
| [1] |
OLINSKI M, GRONOWICZ A, HANDKE A, et al Design and characterization of a novel knee articulation mechanism[J]. International Journal of Applied Mechanics and Engineering, 2016, 21 (3): 611- 622
doi: 10.1515/ijame-2016-0037
|
|
|
| [2] |
SACCARES L, SARAKONLOU I, TSAGA-RAKIS N G. iT-knee: an exoskeleton with ideal torque transmission interface for ergonomic power augmentation [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Daejeon: IEEE, 2016: 780-786.
|
|
|
| [3] |
CHEN B, ZI B, WANG Z, et al Knee exoskeletons for gait rehabilitation and human performance augmentation: a state-of-the-art[J]. Mechanism and Machine Theory, 2019, 134: 499- 511
doi: 10.1016/j.mechmachtheory.2019.01.016
|
|
|
| [4] |
CEMPINI M, DE ROSSI S M M, LENZI T, et al Self-alignment mechanisms for assistive wearable robots: a kineto-static compatibility method[J]. IEEE Transactions on Robotics, 2012, 29 (1): 236- 250
|
|
|
| [5] |
ROWE P J, MYLES C M, WALKER C, et al Knee joint kinematics in gait and other functional activities measured using flexible electro-goniometry: how much knee motion is sufficient for normal daily life?[J]. Gait and Posture, 2000, 12 (2): 143- 155
doi: 10.1016/S0966-6362(00)00060-6
|
|
|
| [6] |
WINKELMEVER E M, SCHOCK J, WOLLSCHLÄGER L M, et al Seeing beyond morphology-standardized stress MRI to assess human knee joint instability[J]. Diagnostics, 2021, 11 (6): 1035
doi: 10.3390/diagnostics11061035
|
|
|
| [7] |
NÄF M B, JUNIUS K, ROSSINI M, et al Misalignment compensation for full human-exoskeleton kinematic compatibility: state of the art and evaluation[J]. Applied Mechanics Reviews, 2018, 70 (5): 050802
doi: 10.1115/1.4042523
|
|
|
| [8] |
POSTOLKA B, SHUTZ P, FUCENTESE S F, et al Tibio-femoral kinematics of the healthy knee joint throughout complete cycles of gait activities[J]. Journal of Biomechanics, 2020, 110: 109915
doi: 10.1016/j.jbiomech.2020.109915
|
|
|
| [9] |
LEE K M, GUO J Kinematic and dynamic analysis of an anatomically based knee joint[J]. Journal of Biomechanics, 2010, 43 (7): 1231- 1236
doi: 10.1016/j.jbiomech.2010.02.001
|
|
|
| [10] |
AMIGO L E, CASALS A, AMAT J. Design of a 3-DoF joint system with dynamic servo-adaptation in orthotic applications [C]// IEEE International Conference on Robotics and Automation. Shanghai: IEEE, 2011: 3700-3705.
|
|
|
| [11] |
ZANOTTO D, AKIYAMA Y, STEGALL P, et al Knee joint misalignment in exoskeletons for the lower extremities: effects on user’s gait[J]. IEEE Transactions on Robotics, 2015, 31 (4): 978- 987
doi: 10.1109/TRO.2015.2450414
|
|
|
| [12] |
李剑锋, 黄相强 膝关节康复外骨骼构型综合与结构设计[J]. 哈尔滨工程大学学报, 2017, 38 (4): 625- 632
LI Jian-feng, HUANG Xiang-qiang Configuration synthesis and structure design of knee rehabilitation exoskeleton[J]. Journal of Harbin Engineering University, 2017, 38 (4): 625- 632
doi: 10.11990/jheu.201601081
|
|
|
| [13] |
PIÑA-MARTÍNEZ E, RODRIGUEZ-LEAR E. Inverse modeling of human knee joint based on geometry and vision systems for exoskeleton applications [J]. Mathematical Problems in Engineering, 2015, 2015: 145734.
|
|
|
| [14] |
HYUN D J, PARK H, HA T, et al Biomechanical design of an agile, electricity-powered lower-limb exoskeleton for weight-bearing assistance[J]. Robotics and Autonomous Systems, 2017, 95: 181- 195
doi: 10.1016/j.robot.2017.06.010
|
|
|
| [15] |
WANG D, LEE K M, GUO J, et al Adaptive knee joint exoskeleton based on biological geometries[J]. IEEE/ASME Transactions on Mechatronics, 2013, 19 (4): 1268- 1278
|
|
|
| [16] |
王森, 李艳文 变轴线生物融合式膝关节康复机构型综合[J]. 机械工程学报, 2020, 56 (11): 72- 79
WANG Sen, LI Yan-wen Type synthesis of rehabilitation mechanism of variable axis biofusion knee joint[J]. Journal of Mechanical Engineering, 2020, 56 (11): 72- 79
doi: 10.3901/JME.2020.11.072
|
|
|
| [17] |
CHOI B, LEE Y, KIM J, et al. A self-aligning knee joint for walking assistance devices [C]// 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Orlando: IEEE, 2016: 2222-2227.
|
|
|
| [18] |
FREEMAN M A R, PINSKEROVA V The movement of the normal tibio-femoral joint[J]. Journal of Biomechanics, 2005, 38 (2): 197- 208
doi: 10.1016/j.jbiomech.2004.02.006
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|