|
|
|
| Intelligent vehicle path tracking control under parametric uncertainties and external disturbances |
Wei TAN1( ),Jing-sheng LIU1(),Hui ZU2,Hong-qian QUAN1 ),Jing-sheng LIU1(),Hui ZU2,Hong-qian QUAN1 |
1. Vehicle Engineering Institute, Chongqing University of Technology, Chongqing 400054, China
2. National Intelligent Network Automobile Quality Inspection and Testing Center(Chongqing), China Merchants Testing Vehicle Technology Research Institute Limited Company, Chongqing 401122, China |
|
|
|
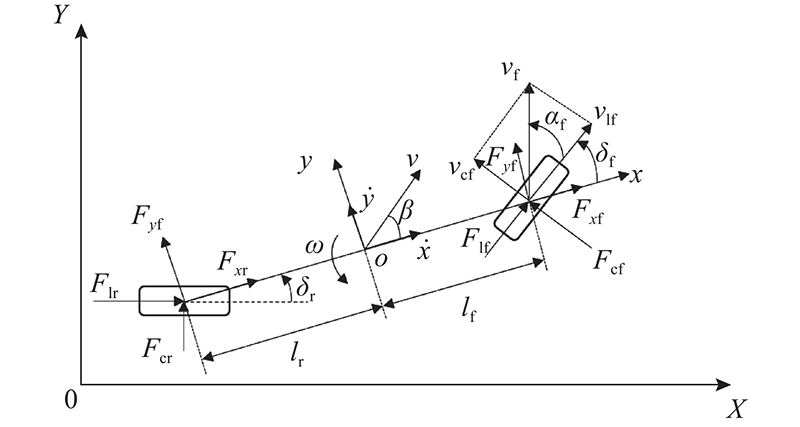
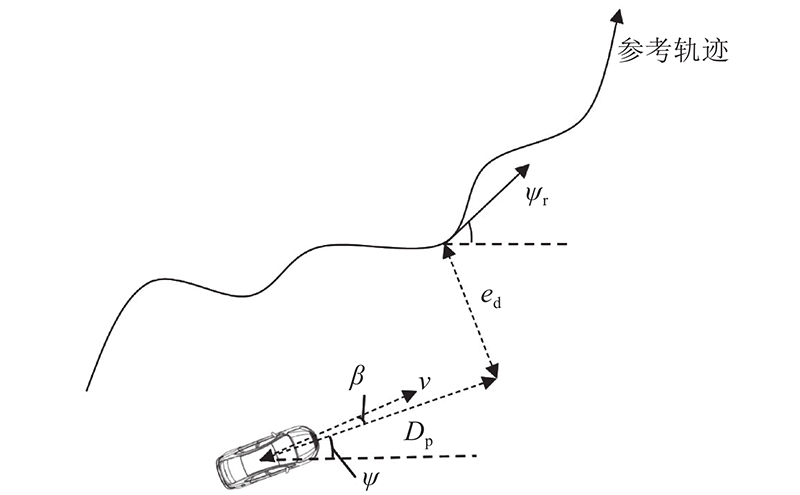
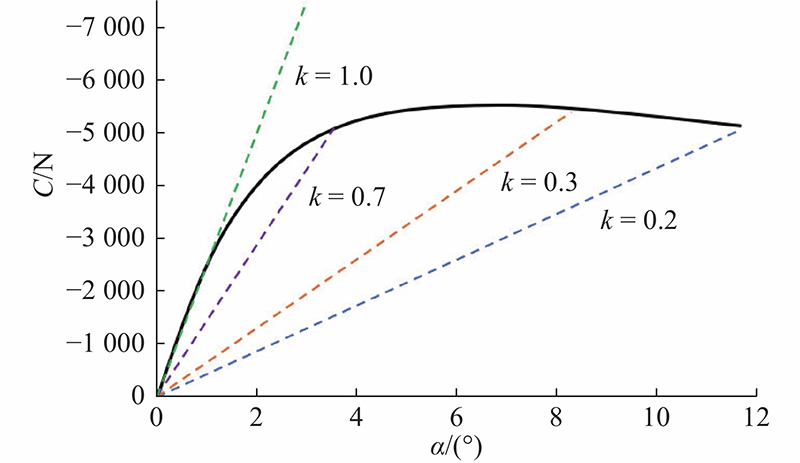
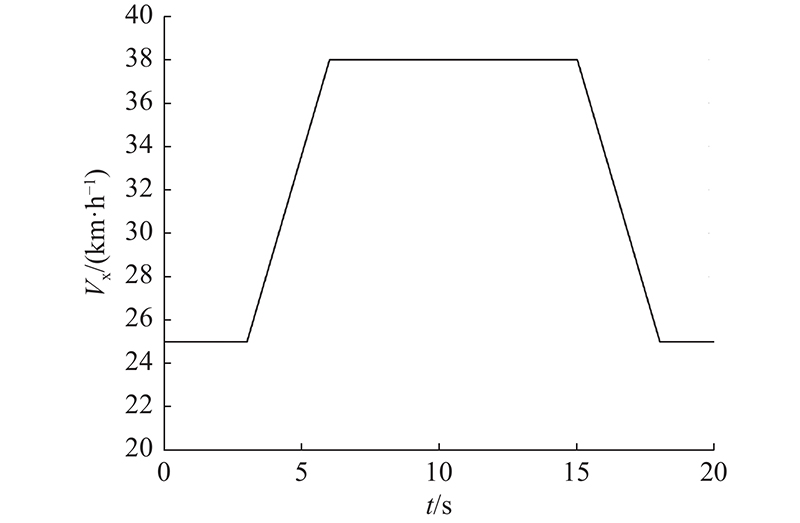
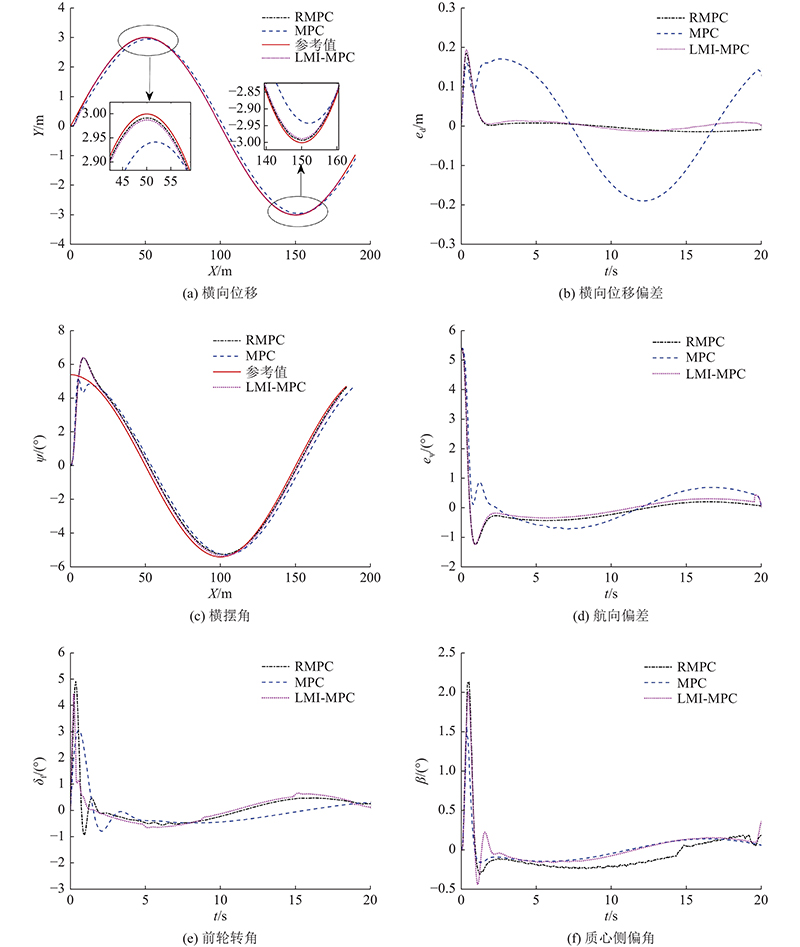
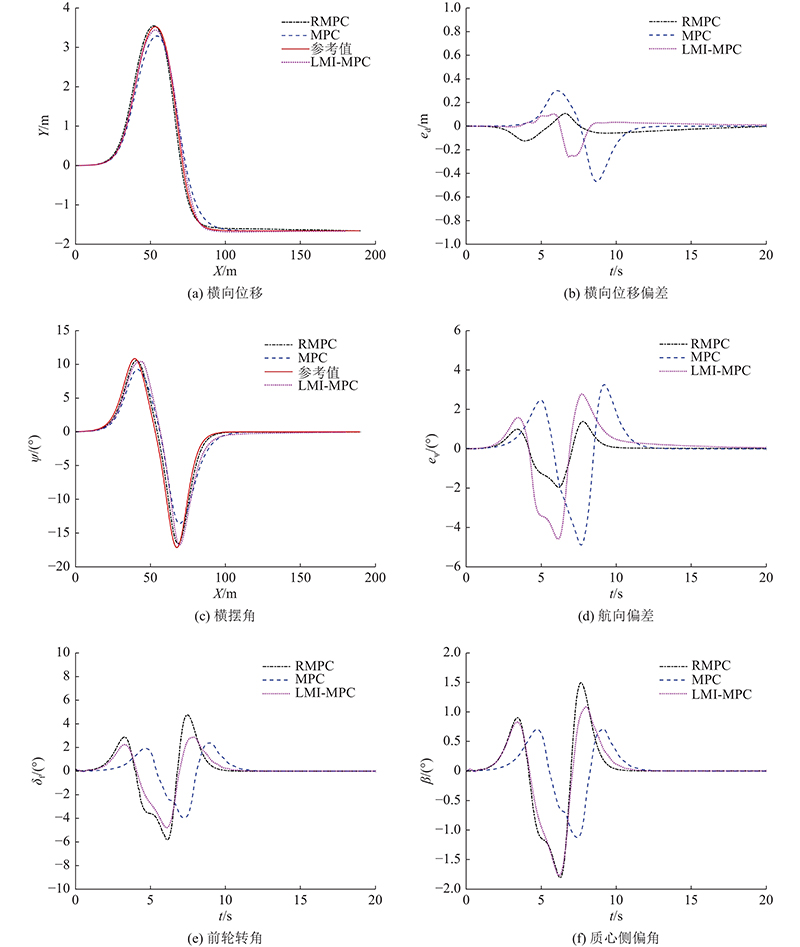
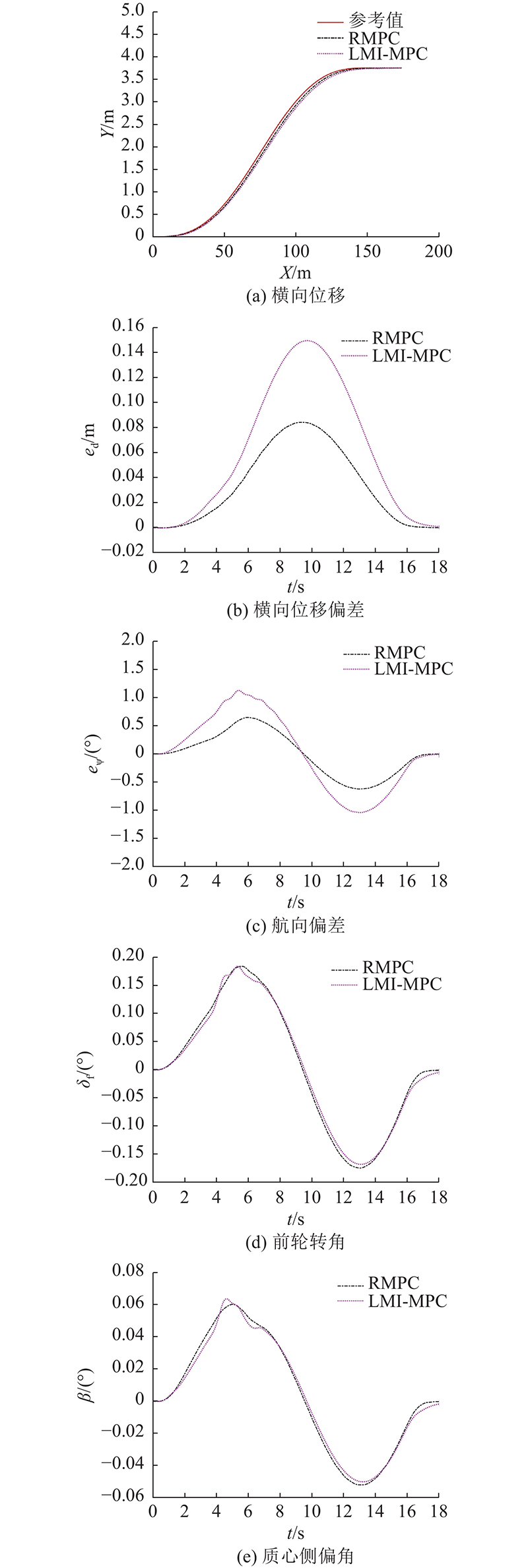
Abstract A path tracking method based on robust model predictive control(RMPC) was designed aiming at the problems of low tracking accuracy and poor robustness caused by model parameter uncertainties, external disturbance, system state time-varying and nonlinearities in the process of path tracking of intelligent vehicles. The nonlinear characteristic of tire was considered, and the cornering stiffness of the tire was modified. Then the time-varying longitudinal speed was considered and a polytope with finite vertices was used to describe the longitudinal vehicle speed. A discrete vehicle polytopic uncertainty model was established. Linear matrix inequalities(LMI)with slack variables were derived to solve the optimization problem according to the Lyapunov asymptotic stability and quadratic performance index in infinite horizon. An improved offline robust model predictive control algorithm was proposed to improve the real-time performance of the controller and reduce its conservativeness. The effectiveness of the controller was verified by Simulink-Carsim co-simulation and hardware-in-the-loop tests. The simulation results showed that the designed controller had good tracking accuracy and robustness.
|
|
Received: 10 April 2022
Published: 21 April 2023
|
|
|
| Fund: 国家重点研发计划资助项目(2018YFB1600800);重庆市教育委员会科学技术研究重点资助项目(KJZD-K201901103) |
参数不确定和扰动下智能汽车路径跟踪控制
针对智能汽车在路径跟踪过程中因模型参数不确定性、外部干扰、系统状态时变性非线性等导致跟踪精度较低、鲁棒性较差的问题,设计基于鲁棒预测控制(RMPC)的路径跟踪控制方法. 考虑轮胎的非线性特性,对轮胎侧偏刚度进行修正. 考虑纵向车速时变性,利用有限个多胞体顶点描述车辆纵向车速,建立离散的车辆多胞不确定模型. 根据Lyapunov渐进稳定性和无穷时域二次型性能指标,采用带松弛变量的线性矩阵不等式(LMI),求解优化问题. 利用改进后的离线鲁棒预测控制算法,提高了控制器的实时性并降低了保守性. 通过Simulink-Carsim联合仿真和硬件在环试验,验证了控制器的有效性. 仿真结果表明,所设计的控制器具有较好的跟踪精度和鲁棒性.
关键词:
智能汽车,
路径跟踪控制,
鲁棒预测控制(RMPC),
线性矩阵不等式(LMI),
参数不确定性
|
|
| [1] |
SUN Yong, WANG Xiang-yu, LI Liang, et al Modelling and control for economy-oriented car-following problem of hybrid electric vehicle[J]. IET Intelligent Transport Systems, 2019, 13 (5): 825- 833
doi: 10.1049/iet-its.2018.5421
|
|
|
| [2] |
陈亮, 秦兆博, 孔伟伟, 等 基于最优前轮侧偏力的智能汽车LQR横向控制[J]. 清华大学学报: 自然科学版, 2021, 61 (9): 906- 912
CHEN Liang, QIN Zhao-bo, KONG Wei-wei, et al Lateral control using LQR for intelligent vehicles based on optimal front-tire lateral force[J]. Journal of Tsinghua University: Science and Technology, 2021, 61 (9): 906- 912
|
|
|
| [3] |
任玥, 冀杰, 赵颖, 等 基于最小模型误差估计的智能汽车路径跟踪控制[J]. 汽车工程, 2021, 43 (4): 580- 587
REN Yue, JI Jie, ZHAO Ying, et al Path tracking control of intelligent vehicle based on minimal model error estimation[J]. Automotive Engineering, 2021, 43 (4): 580- 587
|
|
|
| [4] |
梁军, 朱方博, 蔡英凤, 等 面向复杂曲率变化的智能车路径跟踪控制[J]. 汽车工程, 2021, 43 (12): 1771- 1779
LIANG Jun, ZHU Fang-bo, CAI Ying-feng, et al Intelligent vehicle path tracking control based on complex curvature variation[J]. Automotive Engineering, 2021, 43 (12): 1771- 1779
|
|
|
| [5] |
张维刚, 张朋, 韦昊, 等 一种基于LTVMPC改进的无人驾驶汽车路径跟踪控制算法[J]. 湖南大学学报: 自然科学版, 2021, 48 (10): 67- 73
ZHANG Wei-gang, ZHANG Peng, WEI Hao, et al An improved path tracking control algorithm for autonomous vehicle based on LTVMPC[J]. Journal of Hunan University: Natural Sciences, 2021, 48 (10): 67- 73
|
|
|
| [6] |
KOTHARE M V, BALAKRISHNAN V, MORARI M Robust constrained model predictive control using linear matrix inequalities[J]. Automatica, 1996, 32 (10): 1361- 1379
doi: 10.1016/0005-1098(96)00063-5
|
|
|
| [7] |
谢澜涛, 谢磊, 苏宏业 不确定系统的鲁棒与随机模型预测控制算法比较研究[J]. 自动化学报, 2017, 43 (6): 24
XIE Lan-tao, XIE Lei, SU Hong-ye Comparison of robust and stochastic model predictive control algorithms for uncertain systems[J]. Journal of Automation, 2017, 43 (6): 24
|
|
|
| [8] |
吴海东, 司振立 基于线性矩阵不等式的智能车轨迹跟踪控制[J]. 浙江大学学报: 工学版, 2020, 54 (1): 110- 117
WU Hai-dong, SI Zhen-li Intelligent vehicle trajectory tracking control based on linear matrix inequality[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (1): 110- 117
|
|
|
| [9] |
CHENG S, LI L, CHEN X, et al Model-predictive-control-based path tracking controller of autonomous vehicle considering parametric uncertainties and velocity-varying[J]. IEEE Transactions on Industrial Electronics, 2020, 68 (9): 8698- 8707
|
|
|
| [10] |
董晴, 季学武, 刘玉龙, 等 基于LPV/H∞鲁棒控制的重型商用车自动循迹 [J]. 清华大学学报: 自然科学版, 2022, 62 (3): 438- 446
DONG Qing, JI Xue-wu, LIU Yu-long, et al Robust LPV/H∞ control for automatic path tracking of heavy commercial vehicles [J]. Journal of Tsinghua University: Science and Technology, 2022, 62 (3): 438- 446
|
|
|
| [11] |
PENG H, WANG W, AN Q, et al Path tracking and direct yaw moment coordinated control based on robust MPC with the finite time horizon for autonomous independent-drive vehicles[J]. IEEE Transactions on Vehicular Technology, 2020, 69 (6): 6053- 6066
doi: 10.1109/TVT.2020.2981619
|
|
|
| [12] |
RAJAMANI R. Vehicle dynamics and control [M]. Berlin: Springer, 2006.
|
|
|
| [13] |
GUO J, LUO Y, LI K Robust gain-scheduling automatic steering control of unmanned ground vehicles under velocity-varying motion[J]. Vehicle System Dynamics, 2019, 57 (4): 595- 616
doi: 10.1080/00423114.2018.1475677
|
|
|
| [14] |
谭启凡. 四轮独立转向独立驱动车辆路径跟踪控制策略研究 [D]. 北京: 北京交通大学, 2019.
TAN Qi-fan. Research on path tracking control strategy of four-wheel independent steering independent driving vehicle [D]. Beijing: Beijing Jiaotong University, 2019.
|
|
|
| [15] |
余志生. 汽车理论[M]. 第5版. 北京: 机械工业出版社, 2009.
|
|
|
| [16] |
BASAR T, BERNHARD P. H-infinity optimal control and related minimax design problems: a dynamic game approach [M]. Berlin: Springer, 2008.
|
|
|
| [17] |
RAIMONDO D M, LIMON D, LAZAR M, et al Min-max model predictive control of nonlinear systems: a unifying overview on stability[J]. European Journal of Control, 2009, 15 (1): 5- 21
doi: 10.3166/ejc.15.5-21
|
|
|
| [18] |
YANG W, FENG G, ZHANG T Robust model predictive control for discrete-time Takagi–Sugeno fuzzy systems with structured uncertainties and persistent disturbances[J]. IEEE Transactions on Fuzzy Systems, 2014, 22 (5): 1213- 1228
doi: 10.1109/TFUZZ.2013.2286635
|
|
|
| [19] |
丁宝苍. 预测控制的理论与方法 [M]. 北京: 机械工业出版社, 2017.
|
|
|
| [20] |
WAN Z, KOTHARE M V An efficient off-line formulation of robust model predictive control using linear matrix inequalities[J]. Automatica, 2003, 39 (5): 837- 846
doi: 10.1016/S0005-1098(02)00174-7
|
|
|
| [21] |
张隆阁. 基于多胞的鲁棒预测控制研究 [D]. 北京: 华北电力大学, 2015.
ZHANG Long-ge. Research on robust predictive control based on multicellular [D]. Beijing: North China Electric Power University, 2015.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|