|
|
|
| Decision-making model of autonomous vehicle behavior based on risk prediction |
Qi-peng SUN1( ),Zhi-gang WU1,Ning-bo CAO2,*(),Fei MA1,Ting-zhu DU2 ),Zhi-gang WU1,Ning-bo CAO2,*(),Fei MA1,Ting-zhu DU2 |
1. School of Economics and Management, Chang'an University, Xi’an 710064, China
2. College of Transportation Engineering, Chang'an University, Xi’an 710064, China |
|
|
|
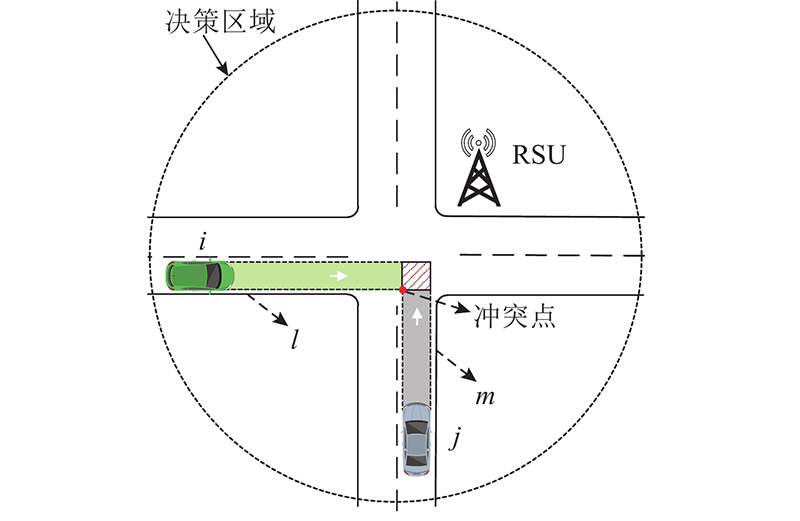
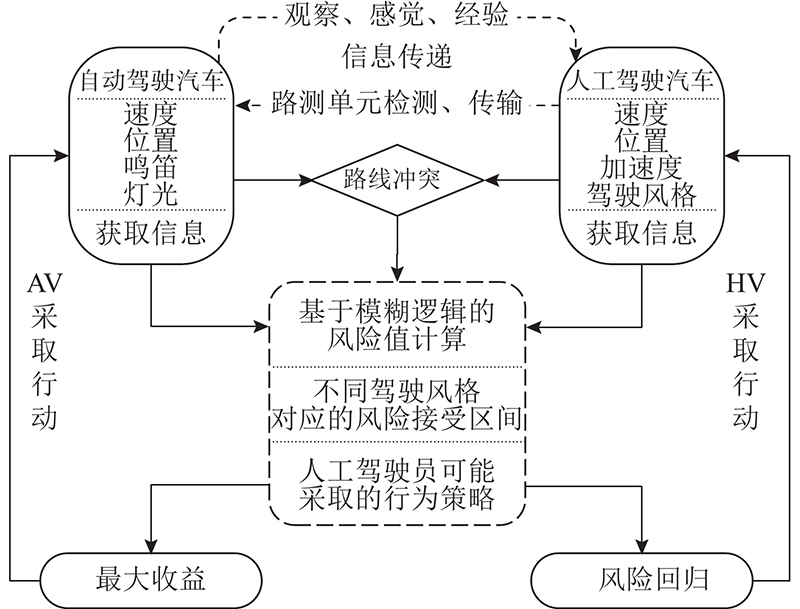
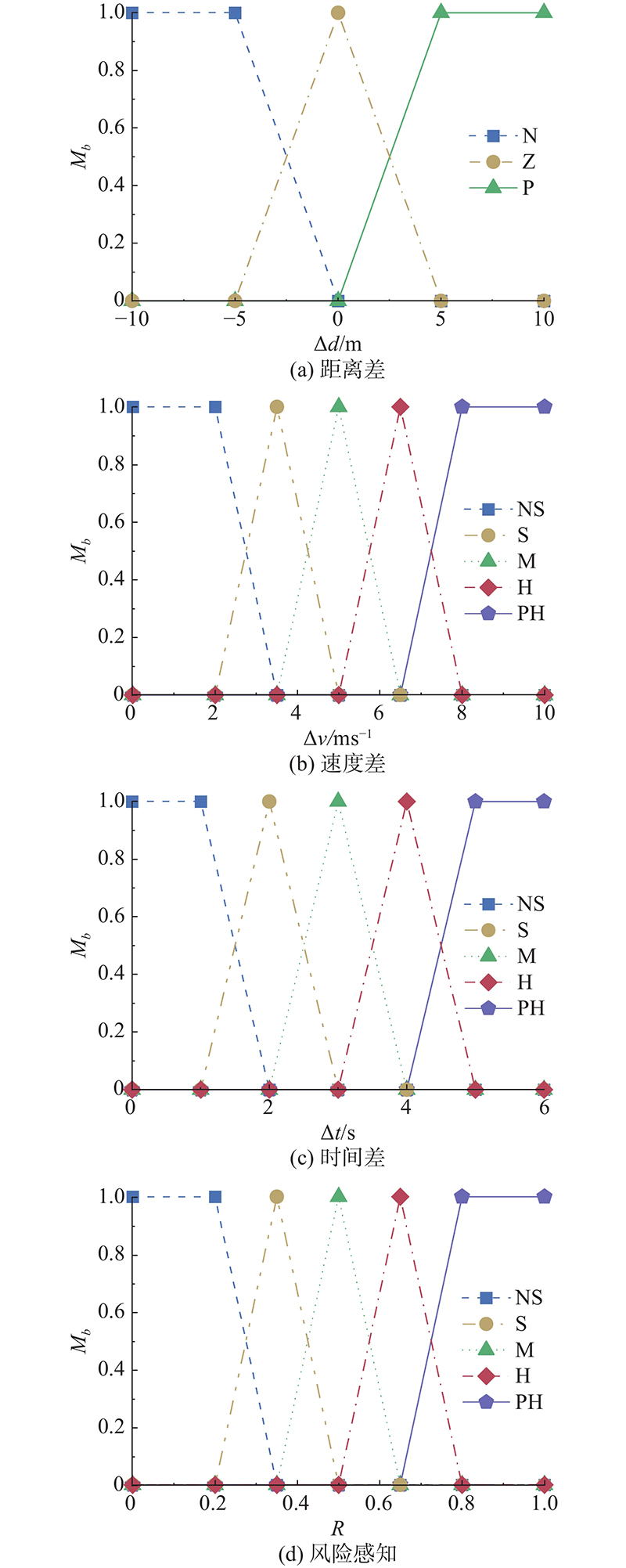
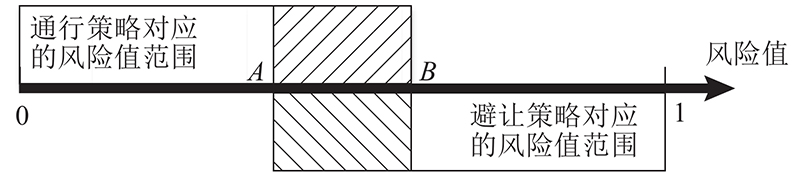
Abstract A behavioral decision-making model for autonomous vehicles based on driver behavior prediction was proposed, in order to solve the problem of right-of-way assignment at an unsignalized intersection in the human-machine hybrid driving environment. Fuzzy logic method was used to construct the driver's risk perception model. Then the human-driven vehicle’s behavior selection strategy was predicted based on the risk equilibrium theory and the acceptable risk interval. Finally the comprehensive utility function of autonomous vehicle was established, using game theory to solve the optimal behavior strategy combination, and realize the coordinated control of vehicles at an unsignalized intersection. Simulation results show that autonomous vehicles can effectively avoid collision accidents and improve the efficiency of autonomous vehicles passing through unsignalized intersections when facing heterogeneous drivers and guarantees that driver risk perception values are within acceptable ranges. Among the 15 experiments conducted, 93.3% of the experimental groups were able to ensure that the time difference of vehicles passing through the conflict point was larger than the acceptable safe transit interval. The travel time of the autonomous vehicle was 1.07~2.43 times that of free flow under different situations. Experimental comparison between the proposed method and the unpredicted selfish game method shows that the proposed method can significantly improve the autonomous vehicle’s traffic efficiency.
|
|
Received: 13 October 2021
Published: 28 September 2022
|
|
|
| Fund: 中国高校产学研创新基金资助项目(2019ITA01019);陕西省教育厅重点科学研究计划项目(21JZ005,20JZ015);中央高校基本科研业务费专项资金资助项目(300102230611,300102238655) |
|
Corresponding Authors:
Ning-bo CAO
E-mail: sunqip@chd.edu.cn;819868226@qq.com
|
基于风险预测的自动驾驶车辆行为决策模型
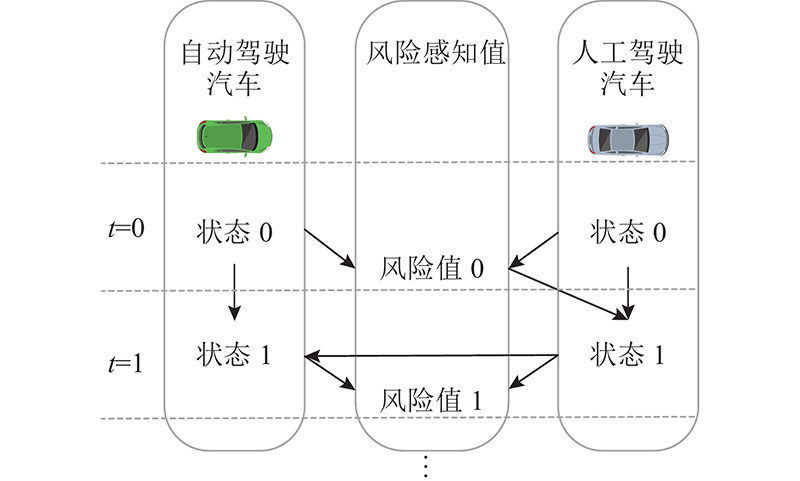
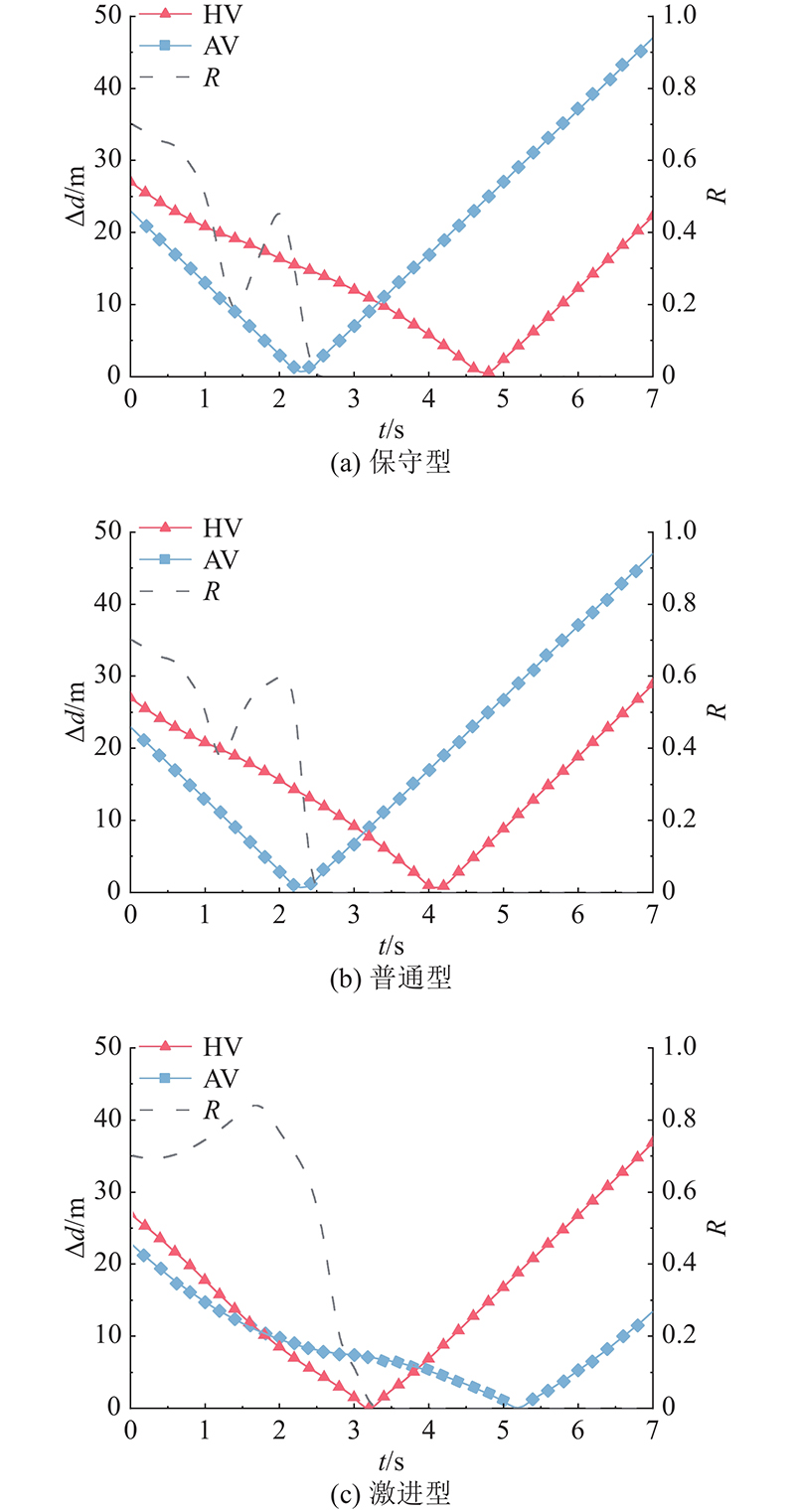
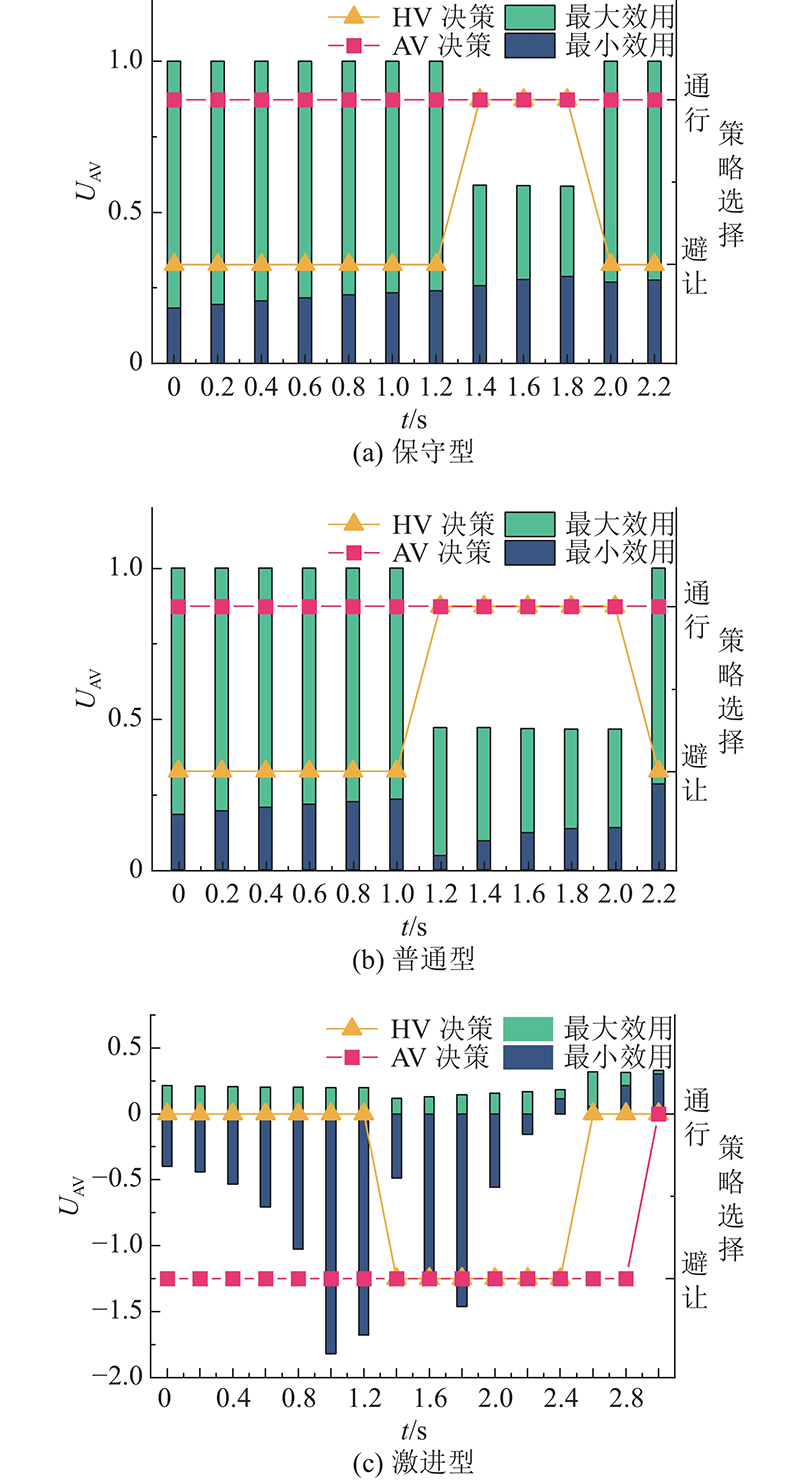
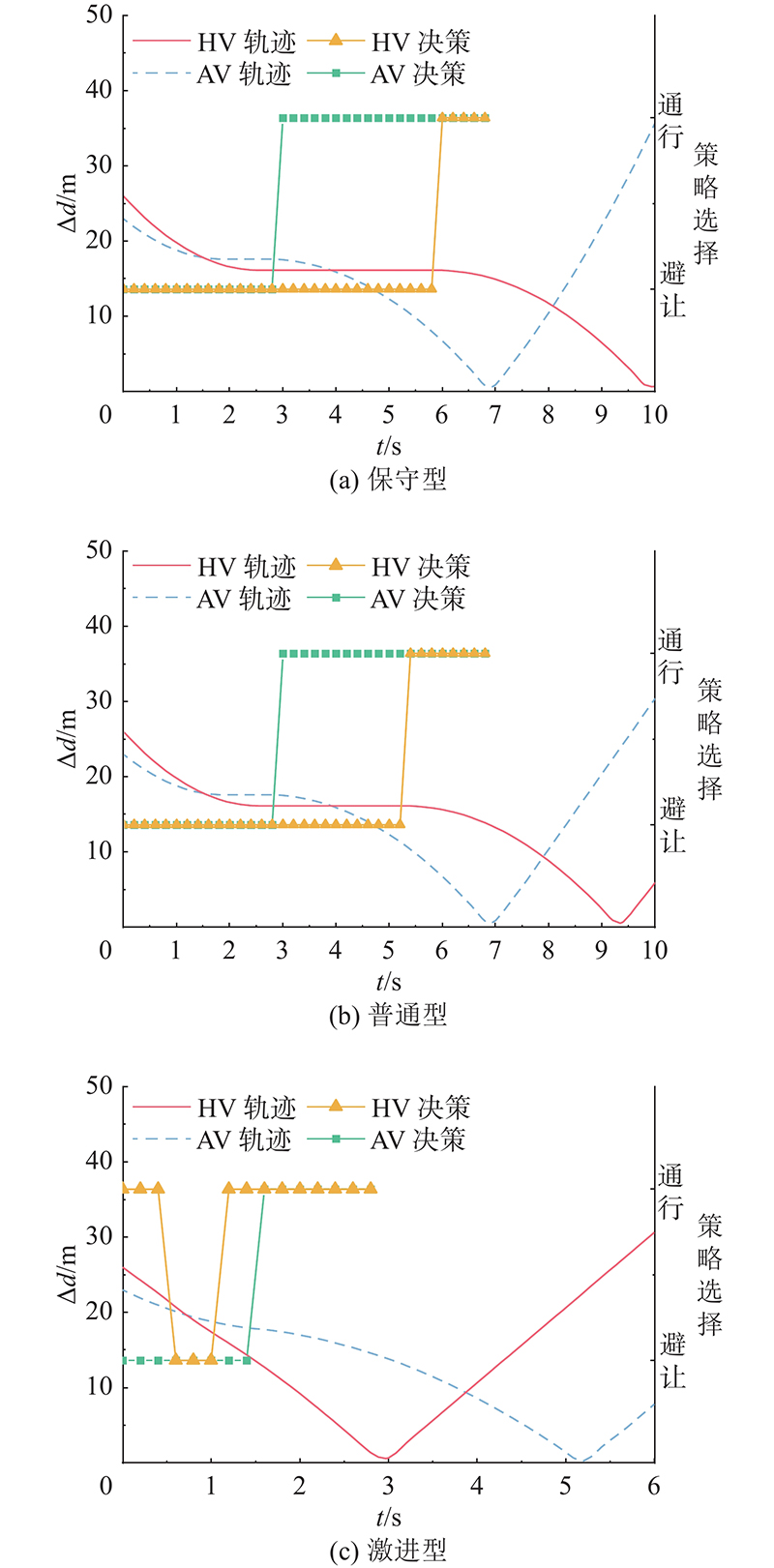
为了解决人工与自动驾驶汽车混行环境下无信号交叉口的通行权分配问题,提出基于驾驶员行为预测的自动驾驶汽车行为决策模型. 利用模糊逻辑方法构建驾驶员的风险感知模型. 基于风险均衡理论,结合可接受风险区间,预测人工驾驶汽车的行为选择策略. 构建自动驾驶汽车的综合效用函数,利用博弈论求解最优行为策略组合,实现无信号交叉口车辆协同控制. 仿真结果表明,面对异质驾驶员,自动驾驶汽车能够有效避免碰撞事故发生并提高自动驾驶汽车通过无信号交叉口的效率,保证驾驶员风险感知值处于可接受范围. 在15组实验中,有93.3%的实验组能够保证车辆通过冲突点的时间差大于可接受的安全通行间隔时间,不同情景下自动驾驶汽车的通行时间是自由流状态的1.07~2.43倍. 与无预测自私博弈模型的对比实验表明,所提模型能够显著提升自动驾驶汽车的通行效率.
关键词:
无信号交叉口,
混合交通环境,
行为预测与决策,
模糊逻辑,
协同控制
|
|
| [1] |
黄玲, 郭亨聪, 张荣辉, 等 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020, 33 (7): 156- 166
HUANG Ling, GUO Heng-cong, ZHANG Rong-hui, et al LSTM based lane-changing behavior model for unmanned vehicle under environment of heterogeneous human-driven and autonomous vehicles[J]. China Journal of Highway and Transport, 2020, 33 (7): 156- 166
doi: 10.3969/j.issn.1001-7372.2020.07.016
|
|
|
| [2] |
钱国敏, 凡俊生, 何春光, 等 智能网联混行环境下交叉口时空资源配置优化[J]. 浙江大学学报: 工学版, 2021, 55 (6): 1019- 1026
QIAN Guo-min, FAN Jun-sheng, HE Chun-guang, et al Optimization of spatial-temporal resources at intersections under environment of mixed traffic flow with connected and autonomous vehicles and human-driven vehicles[J]. Journal of Zhejiang University: Engineering Science, 2021, 55 (6): 1019- 1026
|
|
|
| [3] |
MA W J, LI J J, YU C H Shared-phase-dedicated-lane based intersection control with mixed traffic of human-driven vehicles and connected and automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2022, 135: 103559
|
|
|
| [4] |
WANG H, MENG Q, CHEN S K, et al Competitive and cooperative behaviour analysis of connected and autonomous vehicles across unsignalised intersections: a game-theoretic approach[J]. Transportation Research Part B: Methodological, 2021, 149: 322- 346
doi: 10.1016/j.trb.2021.05.007
|
|
|
| [5] |
WU Y Y, CHEN H P, ZHU F DCL-AIM: decentralized coordination learning of autonomous intersection management for connected and automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2019, 103: 246- 260
doi: 10.1016/j.trc.2019.04.012
|
|
|
| [6] |
宋威龙, 熊光明, 王诗源, 等 基于驾驶员类型分析的智能车辆交叉口行为决策[J]. 北京理工大学学报, 2016, 36 (9): 917- 922
SONG Wei-long, XIONG Guang-ming, WANG Shi-yuan, et al Decision making for intelligent vehicles based on driver type analyzing in an intersection[J]. Transactions of Beijing Institute of Technology, 2016, 36 (9): 917- 922
doi: 10.15918/j.tbit1001-0645.2016.09.007
|
|
|
| [7] |
张名芳, 李慢, 陈子凡, 等 人机混驾环境下无信号交叉口自动驾驶汽车左转运动规划研究[J]. 中国公路学报, 2021, 34 (7): 67- 78
ZHANG Ming-fang, Li Man, Chen Zi-fan, et al Left-turn motion planning of autonomous vehicles at unsignalized intersections in an environment of heterogeneous traffic flow containing autonomous and human-driven vehicles[J]. China Journal of Highway and Transport, 2021, 34 (7): 67- 78
doi: 10.3969/j.issn.1001-7372.2021.07.006
|
|
|
| [8] |
刘创, 梁军 基于注意力机制的车辆运动轨迹预测[J]. 浙江大学学报: 工学版, 2020, 54 (6): 1156- 1163
LIU Chuang, LIANG Jun Vehicle motion trajectory prediction based on attention mechanism[J]. Journal of Zhejiang University: Engineering Science, 2020, 54 (6): 1156- 1163
|
|
|
| [9] |
季学武, 费聪, 何祥坤, 等 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32 (6): 34- 42
JI Xue-wu, FEI Cong, HE Xiang-kun, et al Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32 (6): 34- 42
doi: 10.19721/j.cnki.1001-7372.2019.06.003
|
|
|
| [10] |
裴晓飞, 莫烁杰, 陈祯福, 等 基于TD3算法的人机混驾交通环境自动驾驶汽车换道研究[J]. 中国公路学报, 2021, 34 (11): 246- 254
PEI Xiao-fei, MO Shuo-jie, CHEN Zhen-fu, et al Lane changing of autonomous vehicle based on TD3 algorithm in human-machine hybrid driving environment[J]. China Journal of Highway and Transport, 2021, 34 (11): 246- 254
doi: 10.3969/j.issn.1001-7372.2021.11.020
|
|
|
| [11] |
LI G F, YANG Y F, LI S, et al Decision making of autonomous vehicles in lane change scenarios: deep reinforcement learning approaches with risk awareness[J]. Transportation Research Part C: Emerging Technologies, 2022, 134: 103452
doi: 10.1016/j.trc.2021.103452
|
|
|
| [12] |
成英, 高利, 陈雪梅, 等 有人与无人驾驶车辆交叉口驾驶博弈模型[J]. 北京理工大学学报, 2019, 39 (9): 938- 943
CHENG Ying, GAO Li, CHEN Xue-mei, et al A Driving Game model for manned and unmanned vehicles at intersection[J]. Transactions of Beijing Institute of Technology, 2019, 39 (9): 938- 943
|
|
|
| [13] |
郭伟, 杨明, 王冰, 等 基于博弈论的路口多车协作算法[J]. 华中科技大学学报: 自然科学版, 2011, 39 (Suppl.2): 385- 387
GUO Wei, YANG Ming, WANG Bing, et al Game theory based cooperative driving algorithm for intersection[J]. Journal of Huazhong University of Science and Technology: Natural Science Edition, 2011, 39 (Suppl.2): 385- 387
|
|
|
| [14] |
张邻, 黄选伟, 吴伟明 无信号交叉口交通冲突分析[J]. 重庆交通大学学报: 自然科学版, 2015, 34 (3): 105- 111
ZHANG Lin, HUANG Xuan-wei, WU Wei-ming Analysis of traffic conflict in non-signalized intersection[J]. Journal of Chongqing Jiaotong University: Natural Science, 2015, 34 (3): 105- 111
|
|
|
| [15] |
马庆禄, 聂振宇 基于博弈论的无信号交叉口冲突消解方法[J]. 重庆理工大学学报: 自然科学, 2021, 35 (10): 144- 151
MA Qing-lu, NIE Zhen-yu Conflict resolution method based on game theory at unsignalized intersection[J]. Journal of Chongqing University of Technology: Natural Science, 2021, 35 (10): 144- 151
|
|
|
| [16] |
TANIMOTO J, NAKAMURA K Social dilemma structure hidden behind traffic flow with route selection[J]. Physica A: Statistical Mechanics and its Applications, 2016, 459: 92- 99
doi: 10.1016/j.physa.2016.04.023
|
|
|
| [17] |
TANIMOTO J, SAGARA H Relationship between dilemma occurrence and the existence of a weakly dominant strategy in a two-player symmetric game[J]. Biosystems, 2007, 90 (1): 105- 114
doi: 10.1016/j.biosystems.2006.07.005
|
|
|
| [18] |
KLEIN I, BEN-ELIA E Emergence of cooperation in congested road networks using ICT and future and emerging technologies: a game-based review[J]. Transportation Research Part C: Emerging Technologies, 2016, 72: 10- 28
doi: 10.1016/j.trc.2016.09.005
|
|
|
| [19] |
TANIMOTO J, SAGARA H A study on emergence of alternating reciprocity in a 2×2 game with 2-length memory strategy[J]. Biosystems, 2007, 90 (3): 728- 737
doi: 10.1016/j.biosystems.2007.03.001
|
|
|
| [20] |
袁朝春, 李道宇, 吴飞, 等 汽车纵向主动避撞DRV安全距离模型[J]. 重庆理工大学学报: 自然科学, 2016, 30 (5): 15- 19
YUAN Chao-chun, LI Dao-yu, WU Fei, et al Vehicle longitudinal active collision avoidance DRV safety distance model[J]. Journal of Chongqing University of Technology: Natural Science, 2016, 30 (5): 15- 19
|
|
|
| [21] |
郑刚, 俎兆飞, 孔祚 基于驾驶员反应时间的自动紧急制动避撞策略[J]. 重庆理工大学学报: 自然科学, 2020, 34 (12): 45- 52
ZHENG Gang, ZU Zhao-fei, KONG Zuo The collision avoidance strategy of automatic emergency braking system considering the response time of the driver[J]. Journal of Chongqing University of Technology: Natural Science, 2020, 34 (12): 45- 52
|
|
|
| [22] |
CHEN D, AHN S, LAVAL J, et al On the periodicity of traffic oscillations and capacity drop: the role of driver characteristics[J]. Transportation Research Part B: Methodological, 2014, 59: 117- 136
doi: 10.1016/j.trb.2013.11.005
|
|
|
| [23] |
GONZALEZ A B R, WILBY M R, DÍAZ J J V, et al Modeling and detecting aggressiveness from driving signals[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15 (4): 1419- 1428
doi: 10.1109/TITS.2013.2297057
|
|
|
| [24] |
熊光明, 李勇, 王诗源 基于有限状态机的智能车辆交叉口行为预测与控制[J]. 北京理工大学学报, 2015, 35 (1): 34- 38
XIONG Guang-ming, LI Yong, WANG Shi-yuan Behavior prediction and control method based on FSM for intelligent vehicles in an intersection[J]. Transactions of Beijing Institute of Technology, 2015, 35 (1): 34- 38
doi: 10.15918/j.tbit1001-0645.2015.01.007
|
|
|
| [25] |
DÖRR D, GRABENGIESSER D, GAUTERIN F. Online driving style recognition using fuzzy logic [C]// 17th Intelligent IEEE Conference on Intelligent Transportation Systems. Qingdao: IEEE, 2014: 1021-1026
|
|
|
| [26] |
ZADEH L A Fuzzy sets[J]. Information and Control, 1965, 8 (3): 338- 353
doi: 10.1016/S0019-9958(65)90241-X
|
|
|
| [27] |
YANG S, WANG W S, JIANG Y D, et al What contributes to driving behavior prediction at unsignalized intersections[J]. Transportation Research Part C: Emerging Technologies, 2019, 108: 100- 114
doi: 10.1016/j.trc.2019.09.010
|
|
|
| [28] |
LIU M M, CHEN Y S, LU G Q Modeling crossing behavior of drivers at unsignalized intersections with consideration of risk perception[J]. Transportation Research Part F: Traffic Psychology Behavior, 2017, 45: 14- 26
doi: 10.1016/j.trf.2016.11.012
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|