|
|
|
| Behavior control of hexapod robot based on virtual motoneuron network |
Ya-guang ZHU1,2( ),Chun-chao LIU1,Liang ZHANG1 ),Chun-chao LIU1,Liang ZHANG1 |
1. Key Laboratory of Road Construction Technology and Equipment of MOE, Chang'an University, Xi'an 710064, China
2. State Key Laboratory of Fluid Power and Mechatronic Systems, Hangzhou 310027, China |
|
|
|
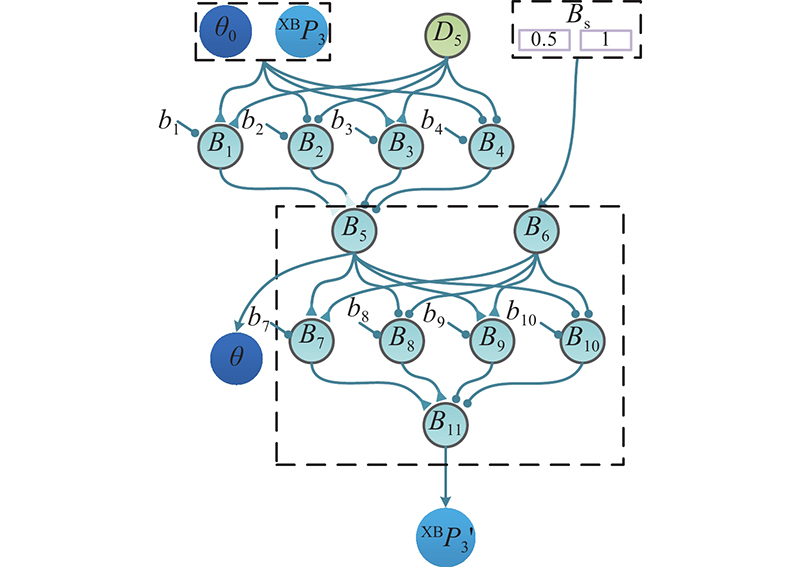
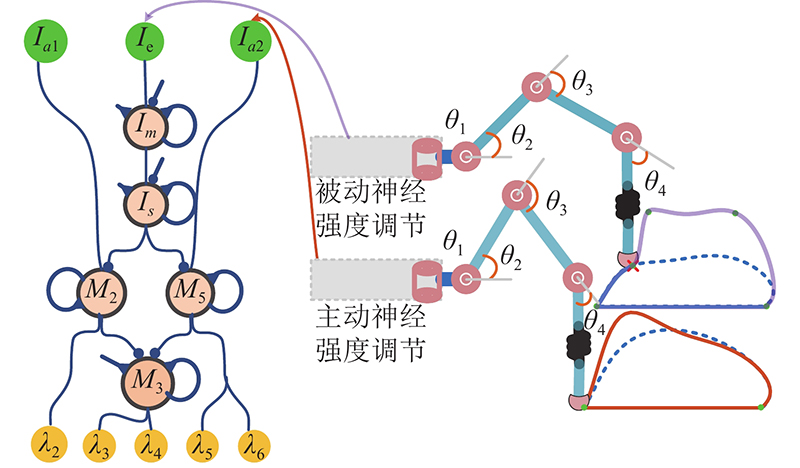
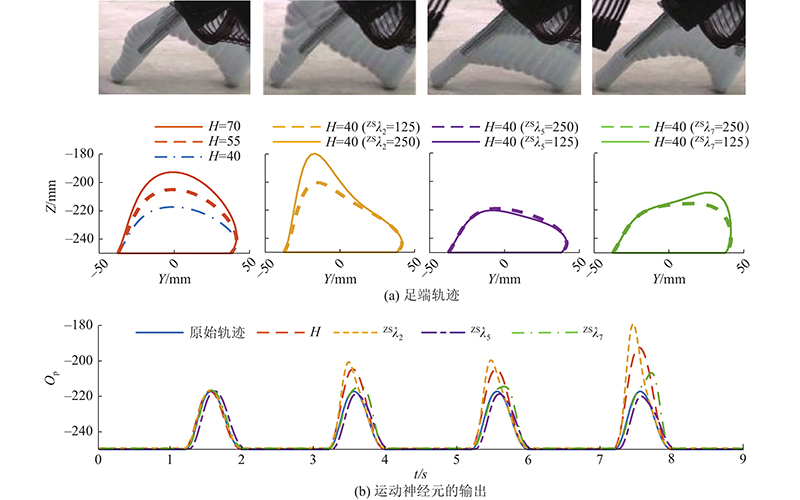
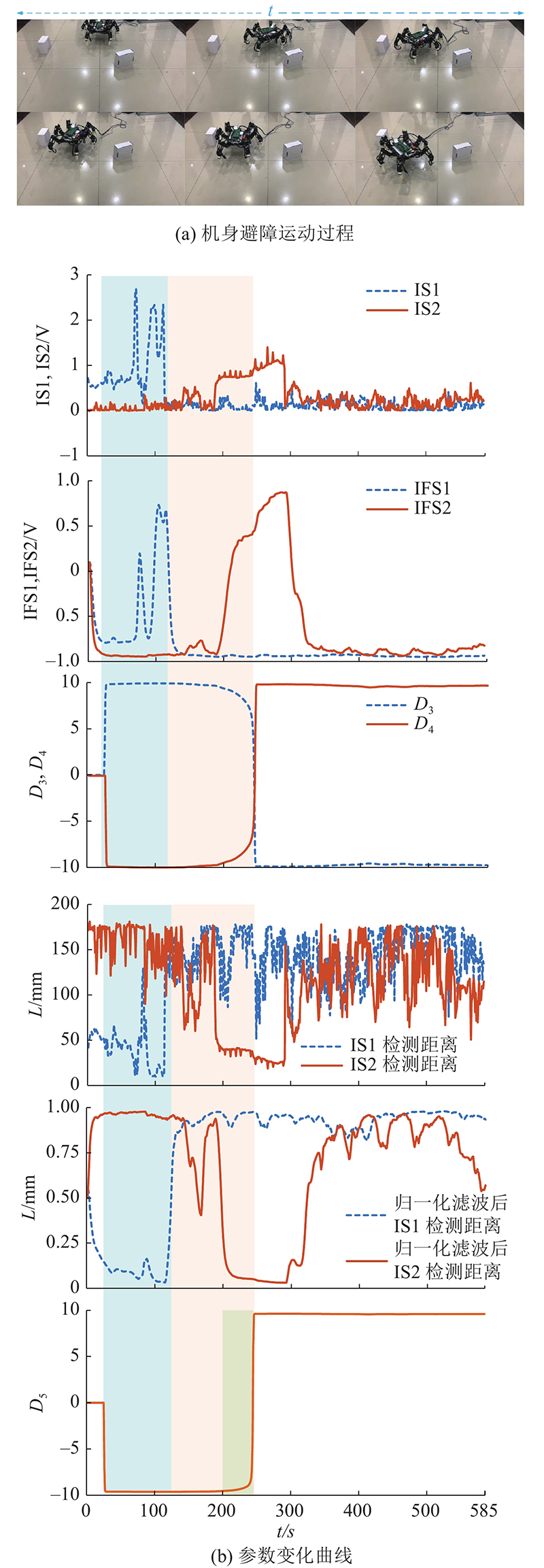
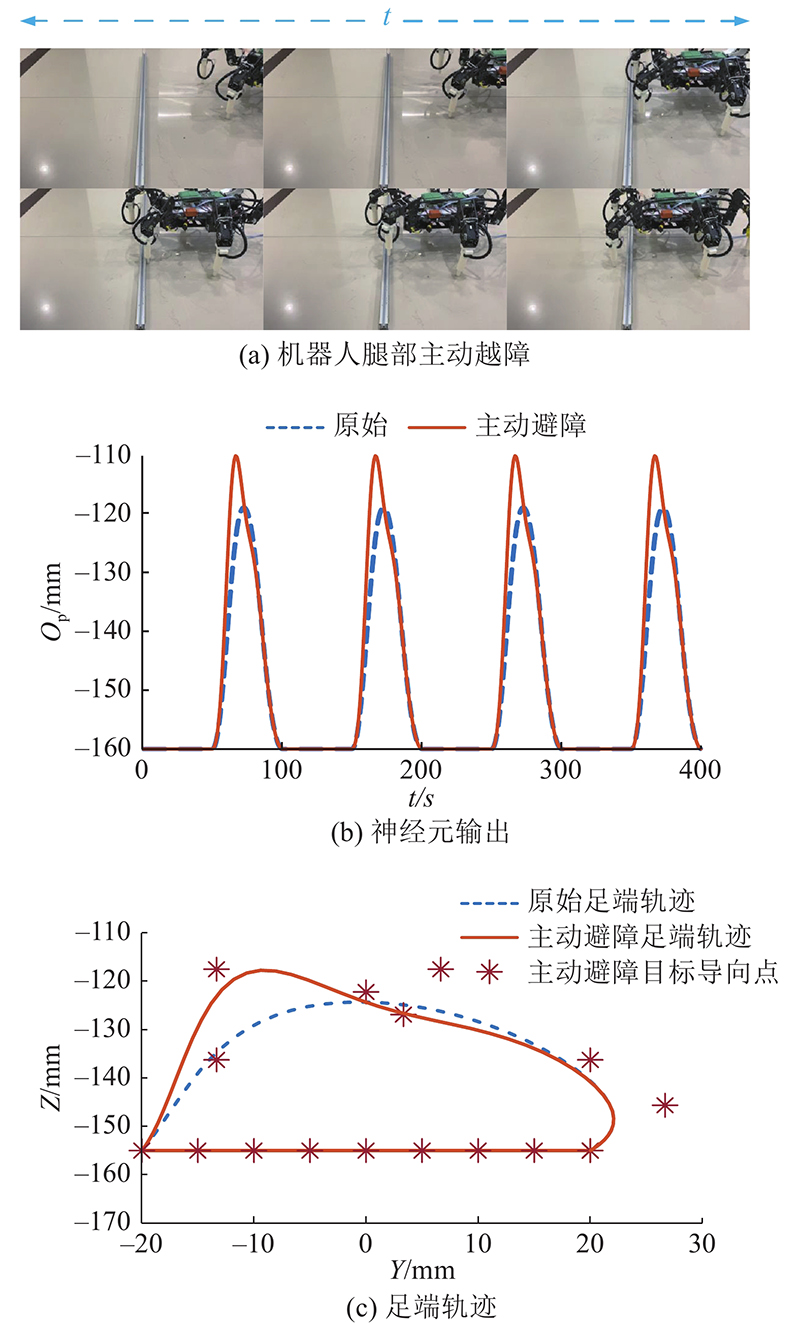
Abstract A behavior control strategy of the hexapod robots based on a virtual motoneuron network was proposed, in order to improve the adaptability and behavior ability of legged robots. By simulating the biological neural-muscle control mechanism, a behavioral motor neural control architecture for a legged robot was constructed, which could process the external environment information, adjust the neural signal intensity, obtain the signal processing and behavioral response mechanism similar to animals, realize the quickly response of the robot to the environment and the adaptive adjustment of the robot body and legs. Experiments results showed that the proposed mechanism made the intensity of neural signals automatically adjust with environmental changes. The strong adaptability to the environment and the behavioral diversity of the robot were verified.
|
|
Received: 09 December 2021
Published: 30 June 2022
|
|
|
| Fund: 国家自然科学基金资助项目(51605039);陕西省重点研发计划国际合作项目(2020KW-064);流体动力与机电系统国家重点实验室开放基金资助项目(GZKF-201923);中央高校基本科研业务费专项资金资助项目(300102259308,300102259401) |
基于虚拟运动神经网络的六足机器人行为控制
为了使腿足机器人适应性和行为能力提高,提出基于虚拟运动神经网络的六足机器人行为控制策略. 通过模拟生物神经?肌肉控制机制构建的腿足机器人行为运动神经控制架构,能够处理外部环境信息,调节神经信号强度,获得类似动物的信号处理和行为反应机制,实现机器人对环境的快速响应、机身与腿部的自适应调节. 实验结果表明,所提架构能够随环境变化自动调节神经信号强度,验证了机器人极强的环境自适应性和行为多样性.
关键词:
神经控制,
虚拟运动神经网络,
自适应,
灵活性,
行为多样性
|
|
| [1] |
DELCOMYN F Insect walking and robotics[J]. Annual Review of Entomology, 2004, 49 (1): 51- 70
doi: 10.1146/annurev.ento.49.061802.123257
|
|
|
| [2] |
BAYRO-CORROCHANO E. Geometric algebra applications vol. II: robot modelling and control [M]. [S. l.]: Springer, 2020: 379-412.
|
|
|
| [3] |
AMROLLAH E, HENAFF P On the role of sensory feedbacks in Rowat–Selverston CPG to improve robot legged locomotion[J]. Frontiers in Neurorobotics, 2010, 4: 113
|
|
|
| [4] |
ROWAT P F, SELVERSTON A I Modeling the gastric mill central pattern generator of the lobster with a relaxation-oscillator network[J]. Journal of Neurophysiology, 1993, 70 (3): 1030- 1053
doi: 10.1152/jn.1993.70.3.1030
|
|
|
| [5] |
SCHILLING M, PASKARBEIT J, SCHMITZ J, et al. Grounding an internal body model of a hexapod walker control of curve walking in a biologically inspired robot [C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Vilamoura-Algarve: IEEE, 2012: 2762-2768.
|
|
|
| [6] |
SARTORI M, YAVUZ U S, FARINA D In vivo neuromechanics: decoding causal motor neuron behavior with resulting musculoskeletal function[J]. Scientific Reports, 2017, 7 (1): 13465
doi: 10.1038/s41598-017-13766-6
|
|
|
| [7] |
FARINA D, VUJAKLIJA I, SARTORI M, et al Man/machine interface based on the discharge timings of spinal motor neurons after targeted muscle sreinnervation[J]. Nature Biomedical Engineering, 2017, 1: 25
doi: 10.1038/s41551-016-0025
|
|
|
| [8] |
WANG T, GUO W, ZHA F, et al. Research on a central pattern generator bionic coupling control system of robot [C]// IEEE International Conference on Information and Automation. Harbin: IEEE, 2010: 723-728.
|
|
|
| [9] |
MANOONPONG P, PARLITZ U, WÖRGÖTTER F Neural control and adaptive neural forward models for insect-like, energy-efficient, and adaptable locomotion of walking machines[J]. Frontiers in Neural Circuits, 2013, 7: 12- 40
|
|
|
| [10] |
STEINGRUBE S, TIMME M, WÖRGÖTTER F, et al Self-organized adaptation of a simple neural circuit enables complex robot behaviour[J]. Nature Physics, 2010, 6 (3): 224- 230
doi: 10.1038/nphys1508
|
|
|
| [11] |
XIONG X, WÖRGÖTTER F, MANOONPONG P Adaptive and energy efficient walking in a hexapod robot under neuromechanical control and sensorimotor learning[J]. IEEE Transactions on Cybernetics, 2015, 46 (11): 2521- 2534
|
|
|
| [12] |
DÜRR V, ARENA P P, CRUSE H, et al Integrative biomimetics of autonomous hexapedal locomotion[J]. Frontiers in Neurorobotics, 2019, 13: 88
|
|
|
| [13] |
WANG Y, XUE X, CHEN B Matsuoka’s CPG with desired rhythmic signals for adaptive walking of humanoid robots[J]. IEEE Transactions on Cybernetics, 2018, 50 (2): 613- 626
|
|
|
| [14] |
WANG T, GUO W, LI M, et al CPG control for biped hopping robot in unpredictable environment[J]. Journal of Bionic Engineering, 2012, 9 (1): 29- 38
doi: 10.1016/S1672-6529(11)60094-2
|
|
|
| [15] |
OWAKI D, GODA M, MIYAZAWA S, et al A minimal model describing hexapedal interlimb coordination: the tegotae-based approach[J]. Frontiers in Neurorobotics, 2017, 11: 29- 42
doi: 10.3389/fnbot.2017.00029
|
|
|
| [16] |
OWAKI D, ISHIGURO A A quadruped robot exhibiting spontaneous gait transitions from walking to trotting to galloping[J]. Scientific Reports, 2017, 7 (1): 277
doi: 10.1038/s41598-017-00348-9
|
|
|
| [17] |
SANTOS C P, ALVES N, MORENO J C Biped locomotion control through a biomimetic CPG-based controller[J]. Journal of Intelligent and Robotic Systems, 2017, 85 (1): 47- 70
doi: 10.1007/s10846-016-0407-3
|
|
|
| [18] |
SUZUKI S, KANO T, IJSPEERT A J, et al Sprawling quadruped robot driven by decentralized control with cross-coupled sensory feedback between legs and trunk[J]. Frontiers in Neurorobotics, 2021, 14: 116
|
|
|
| [19] |
ZHU Y G, ZHANG L, MANOONPONG P. Generic mechanism for waveform regulation and synchronization of oscillators: an application for robot behavior diversity generation [J/OL]. IEEE Transactions on Cybernetics, 2020:1–13. [2021-12-09]. https://ieeexplore.ieee.org/abstract/document/9254119.
|
|
|
| [20] |
ZHU Y G, ZHANG L, GUO W J, et al. A simple and flexible movement control method for a hexapod walking robot [C]// 22nd International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines. Kuala Lumpur: [s. n.], 2019: 79-86.
|
|
|
| [21] |
ZHU Y G, ZHANG L, MANOONPONG P. Virtual motoneuron activation for goal-directed locomotion of a hexapod robot [C]// 2020 5th International Conference on Advanced Robotics and Mechatronics. Shenzhen: IEEE, 2020: 380-386.
|
|
|
| [22] |
ZHU Y G, WU Y S, LIU Q, et al A backward control based on σ-Hopf oscillator with decoupled parameters for smooth locomotion of bio-inspired legged robot[J]. Robotics and Autonomous Systems, 2018, 106: 165- 178
doi: 10.1016/j.robot.2018.05.009
|
|
|
| [23] |
ZHU Y G, ZHOU S J, GAO X D, et al Synchronization of non-linear oscillators for neurobiologically inspired control on a bionic parallel waist of legged robot[J]. Frontiers in Neurorobotics, 2019, 13: 59
doi: 10.3389/fnbot.2019.00059
|
|
|
| [24] |
DONG H, SANGOK S, JONGWOO L, et al High speed trot-running: implementation of a hierarchical controller using proprioceptive impedance control on the mit cheetah[J]. International Journal of Robotics Research, 2014, 33 (11): 1417- 1445
doi: 10.1177/0278364914532150
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|