|
|
|
| Track-before-detect algorithm for weak target based on optimized multi-kernel correlation filtering |
Xiaojia WU1( ),Jinlong YANG1,2,*(),Haohao ZHAO1 ),Jinlong YANG1,2,*(),Haohao ZHAO1 |
1. School of Artificial Intelligence and Computer Science, Jiangnan University, Wuxi 214122, China
2. Engineering Research Center of Integration and Application of Digital Learning Technology, Ministry of Education, Beijing 100039, China |
|
|
|
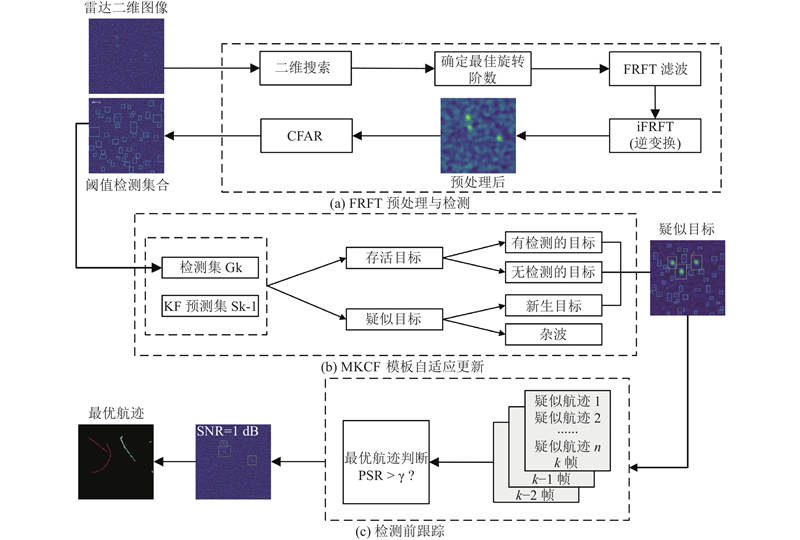
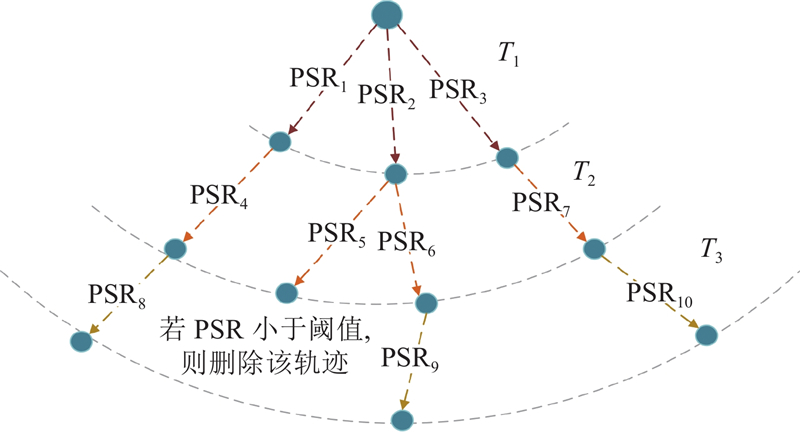
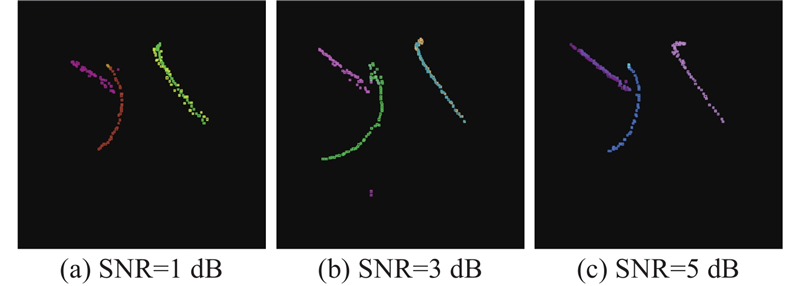
Abstract An optimized track-before-detect algorithm for weak and small target detection based on improved multi-kernel correlation filtering was proposed aiming at the problem that radar target tracking under complex sea clutter environments was subject to strong clutter interference and increased tracking difficulty. Weak and small targets were transformed from the time domain with indistinct features to the fractional Fourier domain where amplitude variations are more pronounced by introducing fractional Fourier transform, followed by filtering to enhance detection rates. The template extraction approach was optimized by incorporating Kalman filtering for target matching in order to address the non-robust template extraction issue in multi-kernel correlation filtering (MKCF) methods. Different template extraction methods were adopted according to target types, and prediction results were fused by using maximum likelihood method in order to improve tracking accuracy. Comprehensive multi-frame information was utilized to select optimal trajectory estimation combined with multi-frame track-before-detect (TBD) algorithm. The experimental results demonstrate that the proposed algorithm effectively adapts to complex sea clutter environments, achieves efficient multi-target tracking under low signal-to-noise ratio and strong clutter interference, and demonstrates superior accuracy compared with traditional methods.
|
|
Received: 11 March 2024
Published: 25 April 2025
|
|
|
| Fund: 数字化学习技术集成与应用教育部工程研究中心2023年创新基金资助项目(1311013);江苏省自然科学基金资助项目(BK20181340). |
|
Corresponding Authors:
Jinlong YANG
E-mail: 6213113030@stu.jiangnan.edu.cn;jlyang@jiangnan.edu.cn
|
优化多核相关滤波的弱小目标检测前跟踪算法
针对复杂海杂波环境下雷达目标跟踪受到强杂波干扰,跟踪难度增加的问题,提出优化多核相关滤波的弱小目标检测前跟踪算法. 通过引入分数阶傅里叶变换,将弱小目标从特征不明显的时域变换到幅值变化比较明显的分数阶域,并进行滤波以提高对弱小目标的检测率. 针对多核相关滤波(MKCF)方法中模板提取不鲁棒的问题,优化模板提取方法,结合卡尔曼滤波进行目标匹配,根据目标类型采用不同的模板提取方法,采用最大似然方法融合预测结果,以增强目标的跟踪精度. 结合检测前多帧跟踪算法,综合多帧信息,选取最佳轨迹估计. 实验结果表明,提出算法能够适应复杂的海杂波环境,对低信噪比、杂波干扰强的多目标进行有效跟踪,与传统方法相比具有较好的精度.
关键词:
多目标跟踪,
雷达弱小目标,
分数阶傅里叶变换,
检测前跟踪(TBD),
多核相关滤波(MKCF)
|
|
| [1] |
LUO M, HUANG B, XING W. Detection performance of distributed coherent aperture radar [C]// 24th International Radar Symposium . Berlin: IEEE, 2023: 1-10.
|
|
|
| [2] |
XU C, WANG F, ZHANG Y, et al. Two-level CFAR algorithm for target detection in MmWave radar [C]// International Conference on Computer Engineering and Application . Kunming: IEEE, 2021: 240-243.
|
|
|
| [3] |
TERKI Z, CHEBBARA F, MEZACHE A. Analysis of non-coherent CFAR detectors in sea-clutter: a comparison [C]// 6th IEEE Congress on Information Science and Technology . Agadir: IEEE, 2021: 401-406.
|
|
|
| [4] |
FAN Y, TAO M, SU J Multifractal correlation analysis of autoregressive spectrum-based feature learning for target detection within sea clutter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1- 11
|
|
|
| [5] |
CHEN X, YU X, HUANG Y, et al Adaptive clutter suppression and detection algorithm for radar maneuvering target with high-order motions via sparse fractional ambiguity function[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 1515- 1526
doi: 10.1109/JSTARS.2020.2981046
|
|
|
| [6] |
温竹鹏, 陈捷, 刘连华, 等 基于小波变换和优化CNN的风电齿轮箱故障诊断[J]. 浙江大学学报: 工学版, 2022, 56 (6): 1212- 1219
WEN Zhupeng, CHEN Jie, LIU Lianhua, et al Fault diagnosis of wind power gearbox based on wavelet transform and improved CNN[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (6): 1212- 1219
|
|
|
| [7] |
WALENCZYKOWSKA M, KAWALEC A. Radar signal recognition using wavelet transform and machine learning [C]// 23rd International Radar Symposium . Gdansk: IEEE, 2022: 492-495.
|
|
|
| [8] |
WANG J H, YI W, KIRRUBARAJAN T, et al An efficient recursive multiframe track-before-detect algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54 (1): 190- 204
doi: 10.1109/TAES.2017.2741898
|
|
|
| [9] |
ZHANG D, LI W, YANG S, et al. Multi-frame track-before-detect for scalable extended target tracking [C]// 25th International Conference on Information Fusion . Linköping: IEEE, 2022: 1-8.
|
|
|
| [10] |
ZHU C, DENG J, LONG X, et al. DBU-net based robust target detection for multi-frame track-before-detect method [C]// 11th International Conference on Control, Automation and Information Sciences . Hanoi: IEEE, 2022: 412-418.
|
|
|
| [11] |
KIM D Y, RISTIC B, GUAN R, et al A bernoulli track-before-detect filter for interacting targets in maritime radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57 (3): 1981- 1991
doi: 10.1109/TAES.2021.3054715
|
|
|
| [12] |
QIN S, DING J, WEN L, et al Joint track-before-detect algorithm for high-maneuvering target indication in video SAR[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 8236- 8248
doi: 10.1109/JSTARS.2021.3104603
|
|
|
| [13] |
DAVEY S J, RUTTEN M G, CHEUNG B. A comparison of detection performance for several track-before-detect algorithms [C]// 11th International Conference on Information Fusion . Cologne: IEEE, 2008: 1–8.
|
|
|
| [14] |
HENRIQUES J F, CASEIRO R, MARTINS P, et al High-speed tracking with kernelized correlation filters[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37 (3): 583- 596
doi: 10.1109/TPAMI.2014.2345390
|
|
|
| [15] |
ZHOU Y, WANG T, HU R, et al Multiple kernelized correlation filters (MKCF) for extended object tracking using X-band marine radar data[J]. IEEE Transactions on Signal Processing, 2019, 67 (14): 3676- 3688
doi: 10.1109/TSP.2019.2917812
|
|
|
| [16] |
ZHOU Y, SU H, TIAN S, et al Multiple-kernelized-correlation-filter-based track-before-detect algorithm for tracking weak and extended target in marine radar systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58 (4): 3411- 3426
doi: 10.1109/TAES.2022.3150262
|
|
|
| [17] |
GU Z, PENG H, WEI B, et al. Research on infrared small target detection algorithm based on YOLOv5 and enhanced KCF algorithm with Kalman filter [C]// IEEE 5th International Conference on Power, Intelligent Computing and Systems . Shenyang: IEEE, 2023: 417-422.
|
|
|
| [18] |
LEI H, MA J, LU X. Target tracking method based on the fusion of structured SVM and KCF algorithm [C]// Chinese Control and Decision Conference . Hefei: IEEE, 2020: 1174-1178.
|
|
|
| [19] |
TANG M, FENG J. Multi-kernel correlation filter for visual tracking [C]// IEEE International Conference on Computer Vision . Santiago: IEEE, 2016: 3038-3046.
|
|
|
| [20] |
孙菲, 厉小润, 赵辽英, 等 基于FrFT变换和全变分正则化的异常检测算法[J]. 浙江大学学报: 工学版, 2022, 56 (7): 1276- 1284
SUN Fei, LI Xiaorun, ZHAO Liaoying, et al Anomaly detection algorithm based on FrFT transform and total variation regularization[J]. Journal of Zhejiang University: Engineering Science, 2022, 56 (7): 1276- 1284
|
|
|
| [21] |
MEDEIROS D S, ALMEIDA GARCÍA F D, MACHADO R, et al CA-CFAR performance in K-distributed sea clutter with fully correlated texture[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: 1- 5
|
|
|
| [22] |
薛健, 孙孟玲, 潘美艳 基于支持向量回归和分位数的雷达K分布海杂波形状参数估计方法[J]. 电子与信息学报, 2022, 44 (12): 1- 9
XUE Jian, SUN Mengling, PAN Meiyan Shape parameter estimation of radar K-distributed sea clutter based on support vector regression and percentiles[J]. Journal of Electronics and Information Technology, 2022, 44 (12): 1- 9
|
|
|
| [23] |
NEUIMIN O S, ZHUK S Y, TOVKACH I O, et al. Analysis of the small UAV trajectory detection algorithm based on the “l/n-d” criterion using Kalman filtering due to FMCW radar data [C]// IEEE 16th International Conference on Advanced Trends in Radioelectronics, Telecommunications and Computer Engineering . Lviv: IEEE, 2022: 741-745.
|
|
|
| [24] |
BAO Z C, JIANG Q X, LLU F Z Multiple model efficient particle filter based track-before-detect for maneuvering weak targets[J]. Journal of Systems Engineering and Electronics, 2020, 31 (4): 647- 656
doi: 10.23919/JSEE.2020.000040
|
|
|
| [25] |
VAQUERO L, MUCIENTES M, BREA V M. SiamMT: real-time arbitrary multi-object tracking [C]// 25th International Conference on Pattern Recognition . Italy: IEEE, 2021: 1051-4651.
|
|
|
| [26] |
KANG W J, XLE C Q, YAO J L, et al. Online multiple object tracking with recurrent neural networks and appearance model [C]// 13th International Congress on Image and Signal Processing , BioMedical Engineering and Informatics . Chengdu: IEEE, 2020: 34-38.
|
|
|
|
Viewed |
|
|
|
Full text
|
|
|
|
|
Abstract
|
|
|
|
|
Cited |
|
|
|
|
| |
Shared |
|
|
|
|
| |
Discussed |
|
|
|
|