1. School of Construction Machinery, Chang’an University, Xi’an 710064, China 2. Technology Center, NORINCO Group Test and Measuring Academy, Xi’an 710043, China
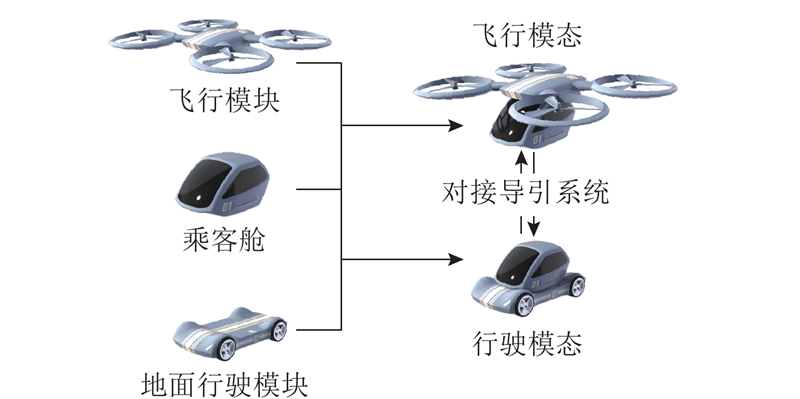
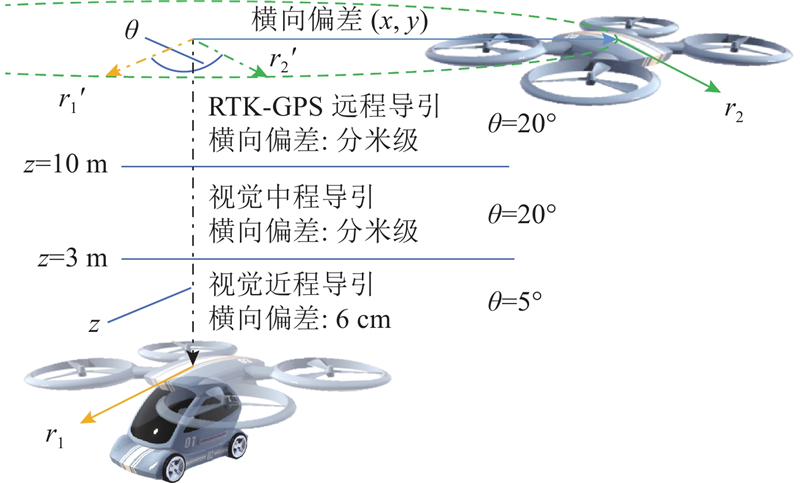
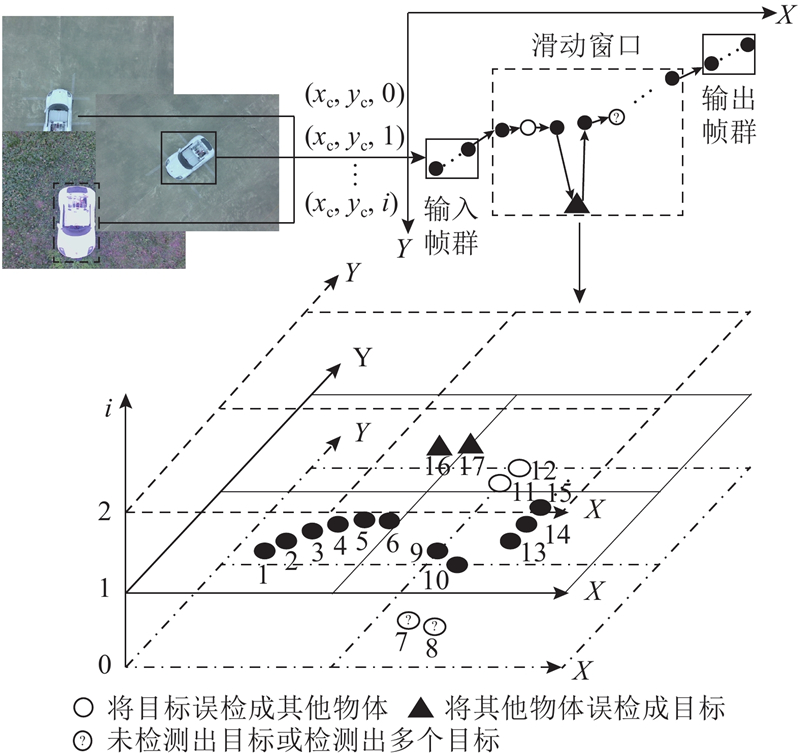
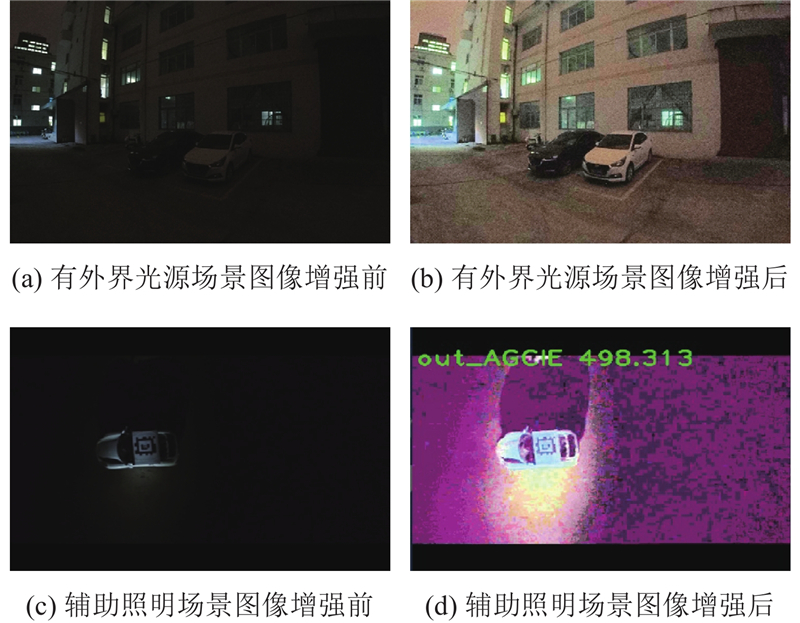
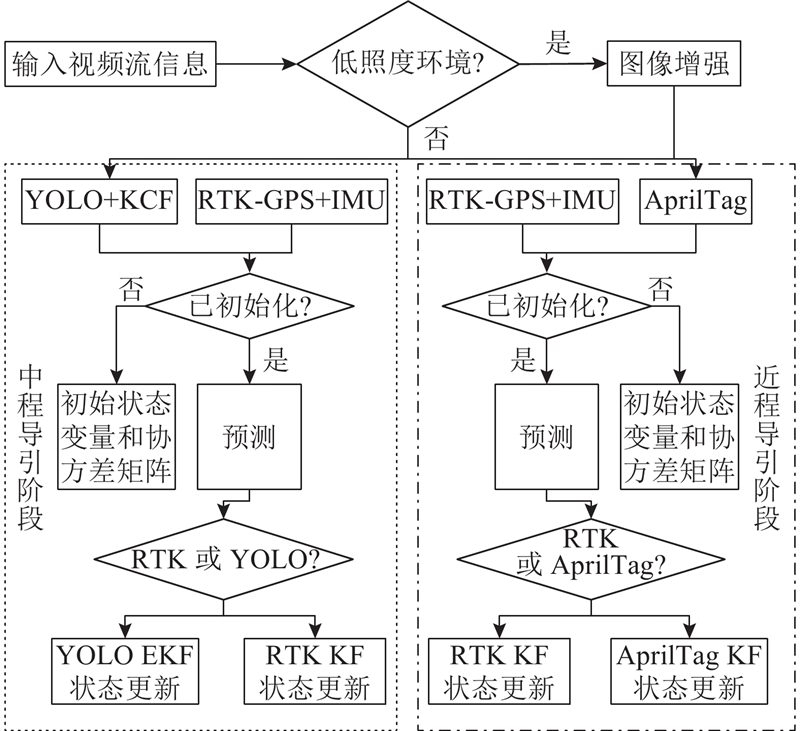
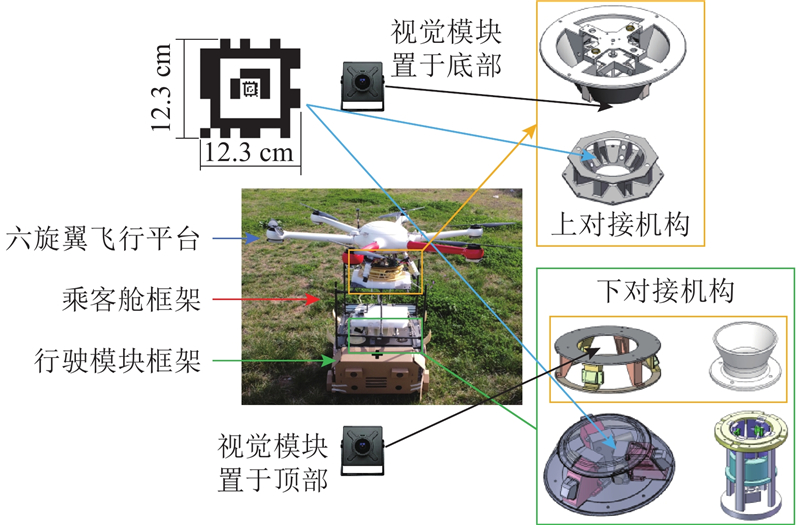
The process architecture, software and hardware systems, core algorithms, and the validation of the autonomous docking guidance system for a modular flying vehicle were investigated. The remote, medium range, and short range multi segment fusion guidance was adopted based on the transition of guidance methods. The point density clustering algorithm and the kernel correlation filter algorithm were used to provide smooth fusion information in response to the false detections and missed detections in the actual use of YOLOv4-tiny. A correction factor method was proposed to achieve fusion correction of AprilTag measurement data in the short range guidance stage, and the pose compensation algorithm was used to solve the camera pose problem of fixed connection between the camera and the drone. The dark light image enhancement algorithm was introduced and combined with the visual guidance algorithm to meet the docking requirements in low-light environment. A simulation platform and an engineering application platform were built, and the process, the system architecture and the algorithms were verified step by step. Experimental results showed that the engineering application flight platform could safely, stably and accurately guide the landing into a conical docking mechanism with an allowable error of only 6 cm and an angle error of 5°. The results prove that the developed autonomous docking technology has good accuracy and reliability.
Chen WANG,Wei LIN,Liang-peng HU,Jun-ming ZHANG. Design and verification of autonomous docking guidance system for modular flying vehicle. Journal of ZheJiang University (Engineering Science), 2023, 57(12): 2345-2355.
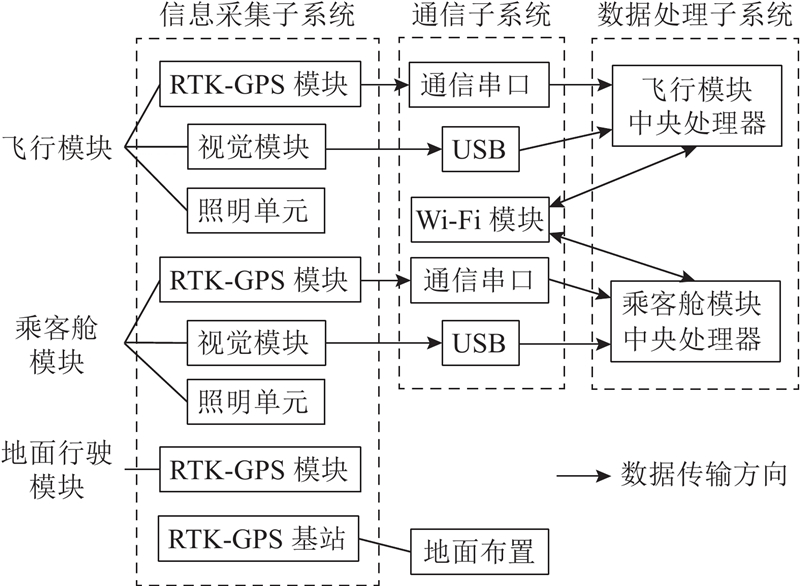
Fig.3Docking guidance hardware system of modular flying vehicle
Fig.4Target detection point density clustering method based on sliding window
Fig.5Comparison of image before and after enhancement
Fig.6Multi-sensor data fusion based on Kalman filter
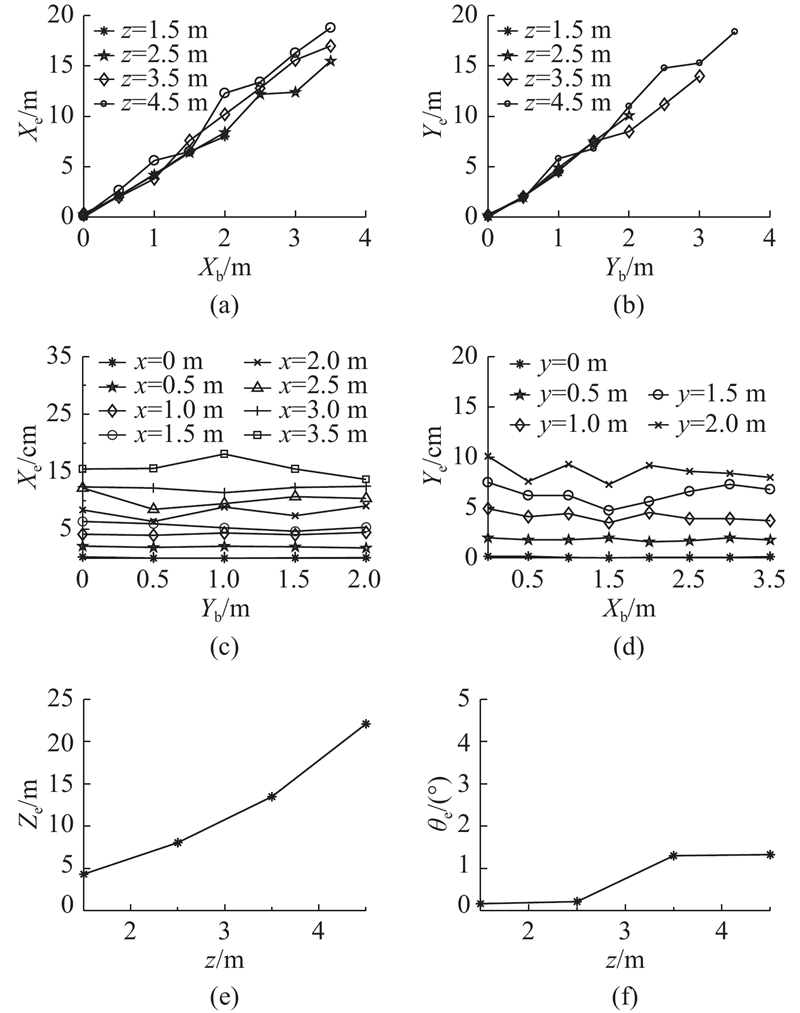
Fig.7Analysis of visual identification code location error at different sampling points
Fig.8Correspondence between engineering application platform and modular flying vehicle
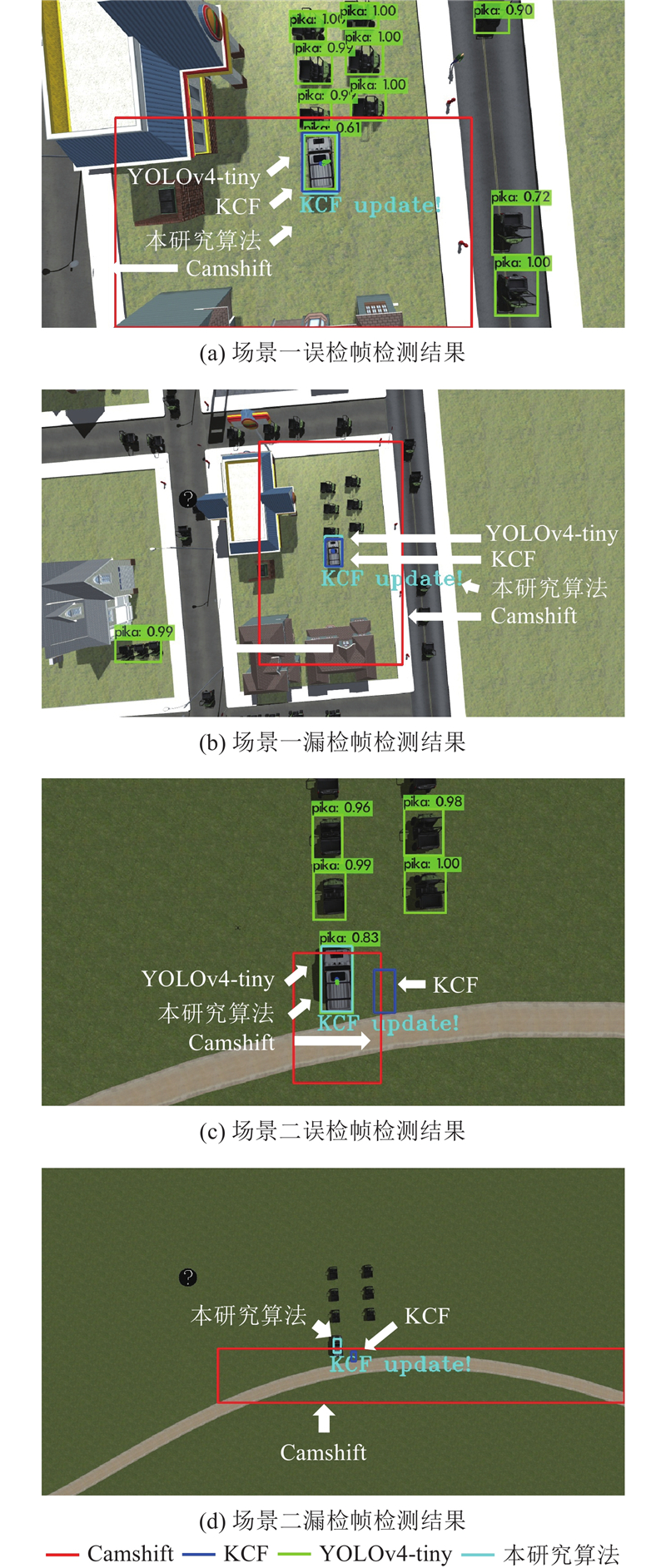
Fig.9Target correction process of error detection frame
算法
场景1
场景2
FNR/%
FPR/%
ACC/%
v/(帧·s?1)
FNR/%
FPR/%
ACC/%
v/(帧·s?1)
Camshift
98.6
0
1.4
263
92.3
0
7.7
290
KCF
13.5
0
86.5
86
68.4
0
31.6
78
YOLOv4-tiny
27.2
29.2
43.6
129
44.2
14.9
40.9
132
本研究
0
8.3
91.7
74
0
6.7
93.3
65
Tab.1Target detection results of different algorithms of medium range in two scenarios
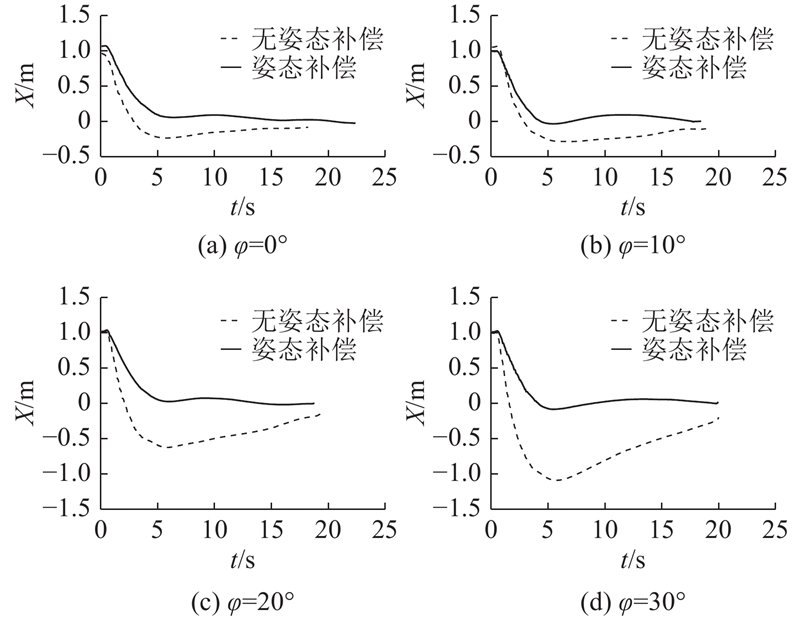
Fig.10Position error in horizontal direction of docking guidance under different roll angles
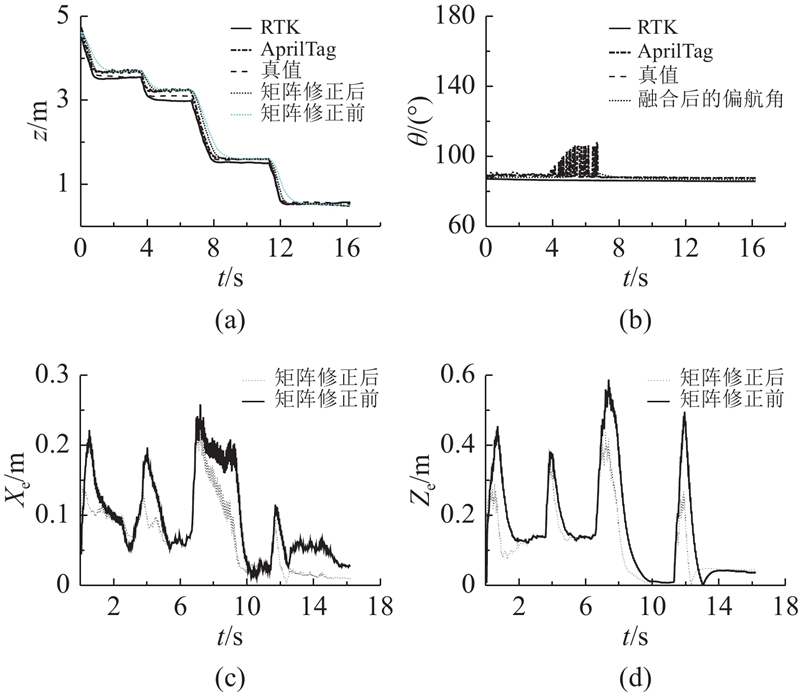
Fig.11Comparison of related parameters after fusion of modified uncertainty matrix and initial uncertainty matrix
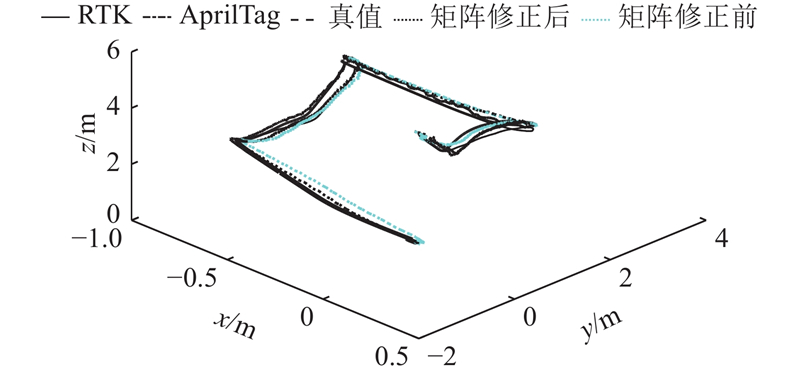
Fig.123D flight path after fusion of modified uncertainty matrix and initial uncertainty matrix
不确定度矩阵类型
${\overline X_{\rm{e}}}/{\rm{cm}} $
${\overline Z_{\rm{e}}}/{\rm{cm}} $
${\overline \theta _{\rm{e}}} $/(°)
初始
9.5667
15.9694
2.2724
修正
6.8554
11.3931
2.2724
Tab.2Simulation test results of multi-sensor data fusion
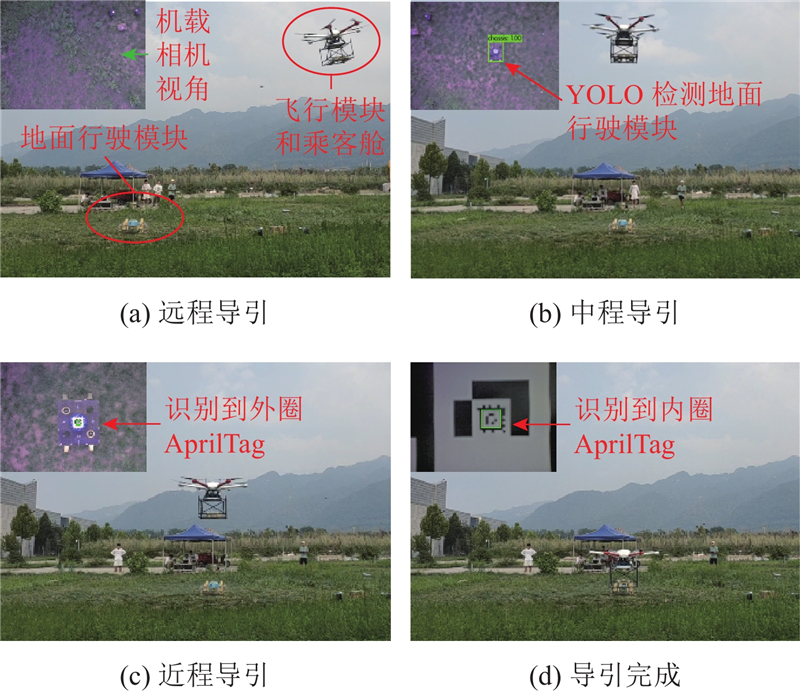
Fig.13Autonomous guidance landing process in up-docking test
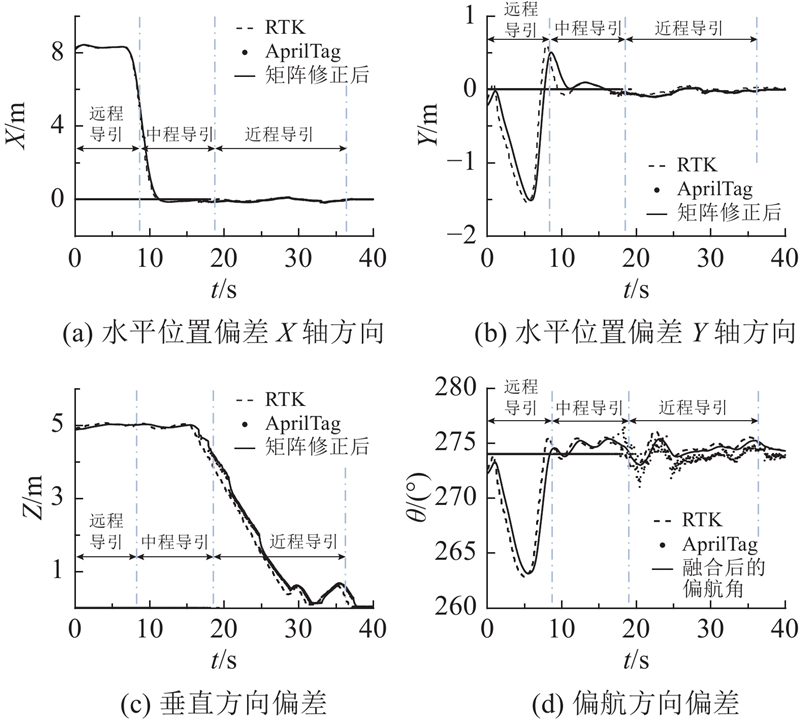
Fig.14Change of relative pose deviation in up-docking test
Fig.15Autonomous guidance landing process in lower-docking test
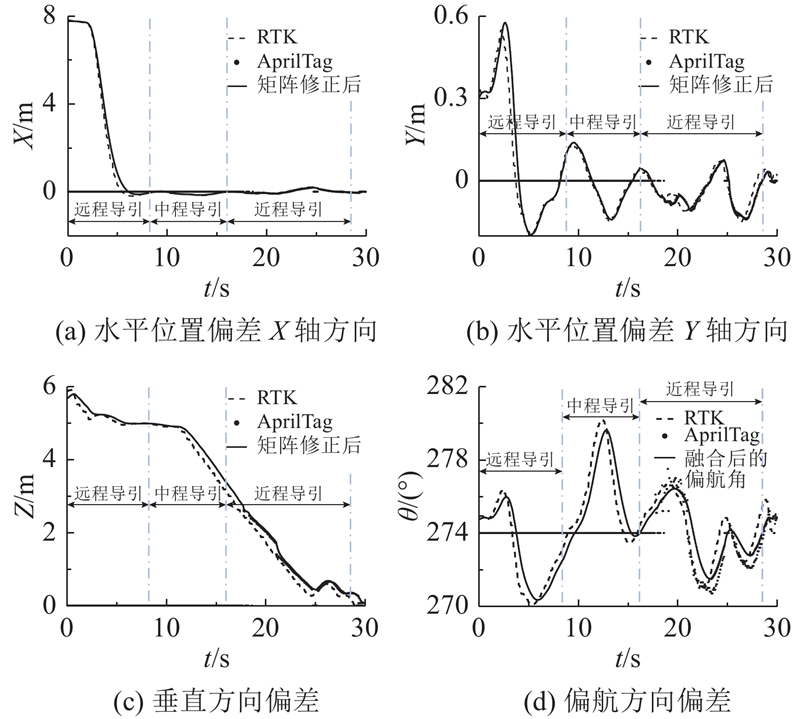
Fig.16Change of relative pose deviation of lower-docking test
[1]
PAN G, ALOUINI M S Flying car transportation system: Advances, techniques, and challenges[J]. IEEE Access, 2021, 9: 24586- 24603
doi: 10.1109/ACCESS.2021.3056798
[2]
SASAKI T, HIDAKA M, TOMITA Y, et al. Proximity operation and automated docking on HTV-X: guidance, navigation, and control strategy [C]// 2022 IEEE Aerospace Conference. Big Sky: IEEE, 2022: 1-10.
[3]
VOLPE R, CIRCI C Optical-aided, autonomous and optimal space rendezvous with a non-cooperative target[J]. Acta Astronautica, 2019, 157: 528- 540
doi: 10.1016/j.actaastro.2019.01.020
[4]
MCMAHON J W, GEHLY S, AXELRAD P. Enhancing relative attitude and trajectory estimation for autonomous rendezvous using flash LIDAR [C]// AIAA/AAS Astrodynamics Specialist Conference. San Diego: [s.n.], 2014: 4359.
[5]
SORNSIN B A, SHORT B W, BOURBEAU T N, et al. Global shutter solid state flash lidar for spacecraft navigation and docking applications [C]// Laser Radar Technology and Applications XXIV. [S.l.]: SPIE, 2019.
[6]
SHI K, LIU C, BIGGS J D, et al Observer-based control for spacecraft electromagnetic docking[J]. Aerospace Science and Technology, 2020, 99: 105759
doi: 10.1016/j.ast.2020.105759
[7]
YAZDANI A M, SAMMUT K, YAKIMENKO O, et al A survey of underwater docking guidance systems[J]. Robotics and Autonomous Systems, 2020, 124: 103382
doi: 10.1016/j.robot.2019.103382
[8]
WANG T, ZHAO Q, YANG C Visual navigation and docking for a planar type AUV docking and charging system[J]. Ocean Engineering, 2021, 224: 108744
doi: 10.1016/j.oceaneng.2021.108744
[9]
VANDAVASI B N J, ARUNACHALAM U, NARAYANASWAMY V, et al Concept and testing of an electromagnetic homing guidance system for autonomous underwater vehicles[J]. Applied Ocean Research, 2018, 73: 149- 159
doi: 10.1016/j.apor.2018.02.003
[10]
PALOMERAS N, VALLICROSA G, MALLIOS A, et al AUV homing and docking for remote operations[J]. Ocean Engineering, 2018, 154: 106- 120
doi: 10.1016/j.oceaneng.2018.01.114
[11]
MATIAS B, OLIVEIRA H, ALMEIDA J, et al. High-accuracy low-cost RTK-GPS for an unmanned surface vehicle [C]// Oceans 2015-Genova. Genova: IEEE, 2015.
[12]
HENKEL P, SPERL A. Real-time kinematic positioning for unmanned air vehicles [C]// 2016 IEEE Aerospace Conference. Big Sky: IEEE, 2016: 1-7
[13]
KANG Y, PARK B J, CHO A, et al A precision landing test on motion platform and shipboard of a tilt-rotor UAV based on RTK-GNSS[J]. International Journal of Aeronautical and Space Sciences, 2018, 19 (4): 994- 1005
doi: 10.1007/s42405-018-0081-8
[14]
CUI T, GUO C, LIU Y, et al. Precise landing control of UAV based on binocular visual SLAM [C]// 2021 4th International Conference on Intelligent Autonomous Systems. Wuhan: IEEE, 2021: 312-317.
[15]
CHEN C, CHEN S, HU G, et al An auto-landing strategy based on pan-tilt based visual servoing for unmanned aerial vehicle in GNSS-denied environments[J]. Aerospace Science and Technology, 2021, 116: 106891
doi: 10.1016/j.ast.2021.106891
[16]
席志鹏, 楼卓, 李晓霞, 等 集中式光伏电站巡检无人机视觉定位与导航[J]. 浙江大学学报: 工学版, 2019, 53 (5): 880- 888 XI Zhi-peng, LOU Zhuo, LI Xiao-xia, et al Vision-based localization and navigation for UAV inspection in photovoltaic farms[J]. Journal of Zhejiang University: Engineering Science, 2019, 53 (5): 880- 888
[17]
苏贇, 王挺, 姚辰, 等 基于合作目标的无人机目标跟踪方法[J]. 机器人, 2019, 41 (4): 425- 432 SU Yun, WANG Ting, YAO Chen, et al A target tracking method of UAV based on cooperative target[J]. Robot, 2019, 41 (4): 425- 432
doi: 10.13973/j.cnki.robot.180479
[18]
张咪, 赵勇, 布树辉, 等 基于阶层标识的无人机自主精准降落系统[J]. 航空学报, 2018, 39 (10): 322150 ZHANG Mi, ZHAO Yong, BU Shu-hui, et al Mutil-level marker based autonomous landing system for UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39 (10): 322150
doi: 10.7527/S1000-6893.2018.22150
[19]
ARORA S, JAIN S, SCHERER S, et al. Infrastructure-free shipdeck tracking for autonomous landing [C]// 2013 IEEE International Conference on Robotics and Automation. Karlsruhe: IEEE, 2013: 323-330.
[20]
ARIANTE G, PAPA U, PONTE S, et al. UAS for positioning and field mapping using LIDAR and IMU sensors data: Kalman filtering and integration [C]// 2019 IEEE 5th International Workshop on Metrology for AeroSpace. Turin: IEEE, 2019: 522-527.
[21]
XU Y, SHMALIY Y S, AHN C K, et al Tightly coupled integration of INS and UWB using fixed-lag extended UFIR smoothing for quadrotor localization[J]. IEEE Internet of Things Journal, 2020, 8 (3): 1716- 1727
[22]
CHENG C, LI X, XIE L, et al Autonomous dynamic docking of UAV based on UWB-vision in GPS-denied environment[J]. Journal of the Franklin Institute, 2022, 359 (7): 2788- 2809
doi: 10.1016/j.jfranklin.2022.03.005
[23]
MARCON P, JANOUSEK J, KADLEC R. Vision-based and differential global positioning system to ensure precise autonomous landing of UAVs [C]// 2018 Progress in Electromagnetics Research Symposium. Wuhan: IEEE, 2018: 542-546.
[24]
KROGIUS M, HAGGENMILLER A, OLSON E. Flexible layouts for fiducial tags [C]// 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems. [S.l.]: IEEE, 2019: 1898-1903.
[25]
KIM J, WOO S, KIM K. Lidar-guided autonomous landing of an aerial vehicle on a ground vehicle [C]// 2017 14th International Conference on Ubiquitous Robots and Ambient Intelligence. Jeju: IEEE, 2017: 228-231.